Изобретение относится к геофизике в частности к способам и устройствам для геоэлектроразведки.
Целью изобретения является повы- шение точности измерений за счет уменьшения влияния промышленной высо- кочастотной и низкочастотной помех.
Способ реализуется следующим образом,
В исследуемой среде возбуждают электромагнитное поле знакопеременными импульсами с периодом Т, измеряют сигнал вторичного поля в каждой паузе между возбуждающими импульсами на временах t,..tn относительно зад- него фронта импульса и синхронно вычитают из сигнала одной паузы сигнал следукщей паузы, получая значения сигнала вторичного поля U7...U, па- ралпельно с синкронньм вычитанием измеренный в каждой паузе сигнал разделяют на высокочастотную и низкочастотную составляющие; измеряют значения этих составляющих на временах tj ...t(i) каждой паузы и синхронно
Суммируют измеренные значения соответственно высокочастотной и низкочастотной составляющих соседних пауз, по полученным суммирова,нным значениям высокочастотной составляющей U ...
..81 4-„
...U| с ПОМОЩЬЮ преобразования Фурье определяют параметры промьшшен- ной помехи
U
Unp(t) А sxnfo t-t-cf), (1)
где А,оз„,С|„- соответственно амплитуды, частота и фаза п-й гармоники помехи, а по полученным суммированным значениям низкочастотной составляющей
и
нч
...и
определяют параметры
(2)
низкочастотной помехи
нч (t).k:B;t ,
где В; - коэффициенты разложения помехи в степенной ряд по вре- мени с помощью матричного , преобразования

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006886C1 |
| Способ геоэлектроразведки | 1981 |
|
SU959005A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1996 |
|
RU2142121C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1414127A1 |
| СПОСОБ ЭЛЕКТРОРАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ПРОСТРАНСТВЕННОГО ДИФФЕРЕНЦИРОВАНИЯ ПОЛЯ СТАНОВЛЕНИЯ НА НЕСКОЛЬКИХ РАЗНОСАХ | 2005 |
|
RU2301431C2 |
| Способ геоэлектроразведки | 1990 |
|
SU1770776A1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2003 |
|
RU2234112C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2004 |
|
RU2281467C2 |
| СПОСОБ РАБОТЫ УСТРОЙСТВА ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА СРЕДЫ МАГНИТОИНДУКЦИОННОГО РАСХОДОМЕРА (ВАРИАНТЫ) И МАГНИТОИНДУКЦИОННЫЙ РАСХОДОМЕР | 2009 |
|
RU2410646C2 |
| Устройство для геоэлектроразведки в движении | 1978 |
|
SU739452A1 |

Изобретение относится к области геофизики в частности к способам и устройствам для геоэлектроразведки. Целью изобретения является повьшение точности измерений за счет уменьшения влияния промышленной высокочастотной и низкочастотной помех, В исследуемой среде возбуждают электромагнитное поле знакопеременными импульсами по окончании которых на временах t...t измеряют сигнал, состоящий из суммы сигнала вторичного поля и сигнала помех. При этом дополнительно измеренные на временах t....tn. каждой . паузы высокочастотные на выходе фильтра высоких частот и низкочастотные на выходе фильтра низких частот составляющие сигнала в соседних паузах синхронно суммируют с целью компенсации знакопеременного сигнала вто- рйчного поля. По полученным суммарным значениям высокочастотных составляющих с помощью преобразования Фурье определяют параметры промьшшенной помехи а по значениям сумм низкочастотных составляющих через.матричное преобразование - параметры низкочастотной помехи. Затем по известным параметрам помех вычисляют их вклад в сигнал вторичного поля и исключают этот вклад из данного сигнала по полученному сигналу судят о свойствах среды. 2 с.п. ф-лы 1 ил. (Л
В..
1 t, (t,+).. .. -fCt,)
В
мм
1
t,,.(t,T)..,.t7 -(t.-M)
затем no известным амплитудам А„, |частотам Q, и фазам q гармоник промышленной помехи вычисляют ее вклад
иГ
«и
Прв значения сигнала. вто ричного- поля UJT ...Uv J по известным
N
помехи в значения сигнала вторичного поля и,. «UH , после чего полученные величины вычитают из значений сигна- .ла вторичного поля U,...Uf и по полученному сигналу судят о свойствах среды.
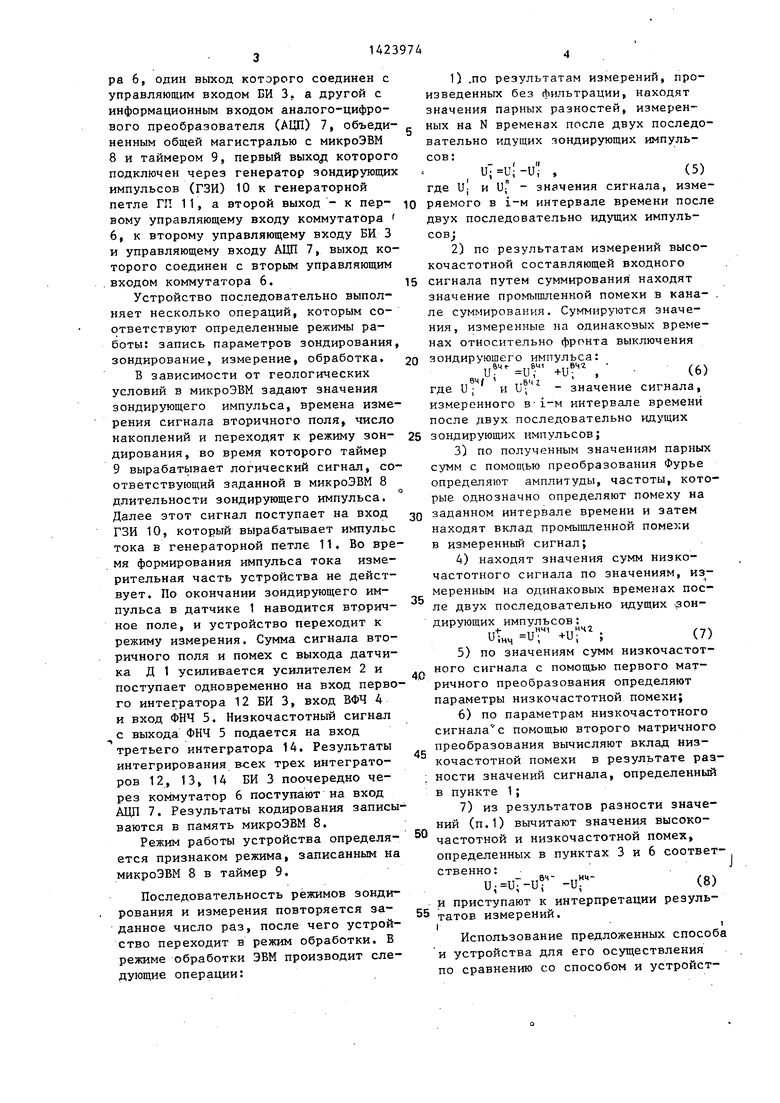
На чертеже приведена блок-схема устройства для реализации предложенного способа.
коэффициентам Вд...В„, определяют вклад низкочастотной помехи в значения сигнала вторичного поля Uj...Un с помощью- второго матричного преобразования
В,
-т)«-
-(
5
Устройство содержит датчик Д 1 (магнитометр или индукционная петля), соединенный через усилитель 2 с первым входом блока интегрирования (БИ) 3 и входами фильтра высокой частоты (ФВЧ) 4 и фильтра низкой частоты (ФНЧ) 5, выходы которых подключены соответственно ко второму 13 и третьему 14 интеграторам БИ 3, а его три выхода соединены с входами коммутатоpa 6, один выход которого соединен с управляющим входом БИ 3. а другой с информациоиньм входом аналого-цифрового преобразователя (АЦП) 7, объединенным общей магистралью с микроЭВМ
8и таймером 9, первый которого подключен через генератор зондирующих импульсов (ГЗИ) 10 к генераторной петле ГП 11, а второй выход - к пер- ю вому управляющему входу коммутатора
6, к второму управляющему входу БИ 3 и управляющему входу АЦП 7, выход которого соединен с вторым управляющим входом коммутатора 6.15
Устройство последовательно выполняет несколько операций, которым соответствуют определенные режимы работы: запись параметров зондирования, зондирование, измерение, обработка. 20
В зависимости от геологических условий в микроэвм задают значения зондирующего импульса, времена измерения сигнала вторичного поля, число накоплений и переходят к режиму зон- 25 дирования, во время которого таймер
9вырабатывает логический сигнал, со ответствующий заданной в микроЭВМ 8 длительности зондирующего импульса. алее этот сигнал поступает на вход -jo ГЗИ 10, который вырабатывает импульс тока в генераторной петле 11. Во время формирования импульса тока измерительная часть устройства не действует. По окончании зондирующего импульса в датчике 1 наводится вторичное поле, и устройство переходит к режиму измерения. Сумма сигнала вторичного поля и помех с выхода датчика Д 1 усиливается усилителем 2 и поступает одновременно на вход первого интегратора 12 БИ 3, вход ВФЧ 4
и вход ФНЧ 5. Низкочастотный сигнал с выхода ФНЧ 5 подается на вход третьего интегратора 14. Результаты интегрирования всех трех интеграторов 12, 13, 14 БИ 3 поочередно че- ; рез коь1мутатор 6 поступают на вход ЦП 7. Результаты кодирования записыаются в память микроэвм 8.
Режим работы устройства определя- 50 ется признаком режима, записанным на икроэвм 8 в таймер 9.
Последовательность режимов зондирования и измерения повторяется за- gg анное число раз, после чего устройство переходит в режим обработки. В режиме обработки ЭВМ производит слеующие операции:
45
5
;
0
g
5
1).по результатам измерений, произведенных без фильтрации, находят значения парных разностей, измеренных на N временах после двух последовательно идущих зондирующих импульсов:
,(5)
где U| и и - значения сигнала, измеряемого в i-M интервале времени после двух последовательно идущих импульсов;
2)по результатам измерений высокочастотной составляющей входного сигнала путем суммирования находят значение промышленной помехи в кана- . ле суммирования. Суммируются значения, измеренные на одинаковых временах относительно фронта выключения зондирующего импульса:
иГ иГ иГ . (6)
где U; и - значение сигнала, измеренного в-i-м интервале времени после двух последовательно идущих зондирующих импульсов;
3)по полученным значениям парных сумм с помощью преобразования Фурье определяют амплитуды, частоты, которые однозначно определяют помеху на заданном интервале времени и затем находят вклад промышленной поме5:и
в измеренный сигнал;
4)находят значения сумм низкочастотного сигнала по значениям, измеренным на одинаковых временах после двух последовательно идущих .он- дирующих импульсов:
ut,, иГ ; (7)
5)по значениям сумм низкочастотного сигнала с помощью первого матричного преобразования определяют параметры низкочастотной помехи;
6)по параметрам низкочастотного сигнала с помощью второго матричного преобразования вычисляют вклад низкочастотной помехи в результате разности значений сигнала, определенный в пункте 1;
7)из результатов разности значений (п.1) вычитают значения высокочастотной и низкочастотной помех, определенных в пунктах 3 и 6 соответственно:
и-иГ-иГ -иГ (8)
и приступают к интерпретации результатов измерений.
I 1
Использование предложенных способа
и устройства для егб осуществления по сравнению со способом и устройстйом-прототипом позволяет в десятки улучшить подавл-ение промьппленной л|омехи, когда она невелика (сравнима ci сигналом) и синхронизация импульса с фазой помехи неустойчива. Улучшение п|одавления низкочастотной помехи дос- т|игает сотен раз, причем эффектив- н1ость предложенного способа тем выше,
ем больше период помехи по сравнению Q а по известным коэффициентам разложепериодом зондирующих импульсов; В результате увеличивается точность измерений, что позволяет увеличить глубинность поиска.
ния низкочастотной помехи с помощью второго матричного преобразования определякУг вклад низкочастотной помехи в значение сигнала вторичного поля, после чего значения величин этих помех вычитают из значения сигнала вторичного поля и по полученному сигналу судят о свойствах среды.
Ф
ормула изобретения
1, Способ геоэлектроразведки, при кйтором в исследуемой среде возбувда- ют электромагнитное поле знакопере™ м(1нными импульсами с периодом Т, измеряют сигнал вторичного поля в каждой паузе между импульсами на времв Hiix t,..t относительно заднего ф)онта импульса и синхронно вьиитают и:1 сигнала одной паузы сигнал следую- щ(Й паузы, получая значения сигнала в горичного поля, отличающий™ я тем, что, с целью повышения: точ- измерений за счет уменьшения влияния промышленной высокочастотной и низкочастотной помех, параллельно синхронным вычитанием измеренный каждой паузе сигнал разделяют на В1)1сокочастотную и низкочастотную составляющие измеряют значенр1Я этих составляющих на временах t.,.tK каждой паузы и синхронно суммируют изме рснные значения соответственно высо- кс1)частотной и низкочастотной сбстав- лйющих соседних пауз, по полученным ctMMHpogaHHbiM значениям высокочастот- нфй составляющей с помощью преобразо- Фурье определяют параметры сйектральных составляющих высокочастотной помехи, а по полученным суммированным значениям низкочастотной составляющей с помощью первого матричного преобразования определяют коэффициенты разложения низкочастотной помехи в степенной ряд по временир затем по известному спектру высокочастотной помехи вычисляют ее.вклад в значение сигнала вторичного поля,
5
0
5
0
5
0
5
ния низкочастотной помехи с помощью второго матричного преобразования определякУг вклад низкочастотной помехи в значение сигнала вторичного поля, после чего значения величин этих помех вычитают из значения сигнала вторичного поля и по полученному сигналу судят о свойствах среды.
2, Устройство для геоэлектроразведки, содержащее датчик, через уси литель и.блок интегрирования подклю-. чеыный к входу аналого-цифрового , преобразователя (АЦП), объединенного общей магистралью с микроЭВМ и таймером, первый выход которого подключен к управляющим входам АЦП и блока интегрирования, а второй - к генератору задающих импульсов, о т. л и - чающееся тем, что, с целью повышения точности измерения сигнала за счет уменьшения влияния промыт- ленной и низкочастотной помех в устройство дополнительно введены коммутатор, два управляющих входа которого подключены соответственно к первому выходу таймера и управляющему выходу АЦП5 а также фильтры высокой и низкой частот, входы которых соединены с выходом усилителя, а выходы подключены соответствено к второму к третьему входам блока интегрирования, со держащего три интегратора, причем все три выхода блока интегрирования соединены с входами .коммутатора, один выход которого соединен с информационным входом АЦП, а другой - с вторым управляющим входом блока интегрирования.
Составитель Е.Игнаткин Редактор М.Циткина Техред м.ДидыкКорректор Л.Патаи
Заказ А685/49
Тираж 522
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Способ геоэлектроразведки | 1979 |
|
SU811185A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зондирование становлением поля в блкжией зоне | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Патент США 4247821 кл.324-6 G 01 V 3/10 1981. | |||
