Изобретение относится к области измерительной техники и может быть использовано в устройствах, предназначенных для измерения мгновенного значения периодически повторяющегося сигнала в условиях импульсных, периодических промышленных и случайных с нормальным распределением помех, в частности в устройствах для геоэлектроразведки методом переходных процессов и зондированием поля в ближней зоне.
Целью изобретения является повышение разрешающей способности при одновременном снижении энергетических и временных затрат.
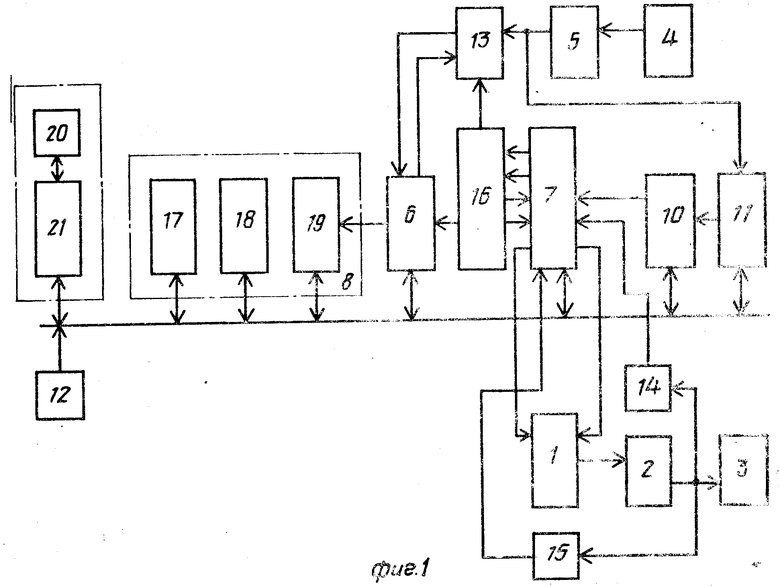
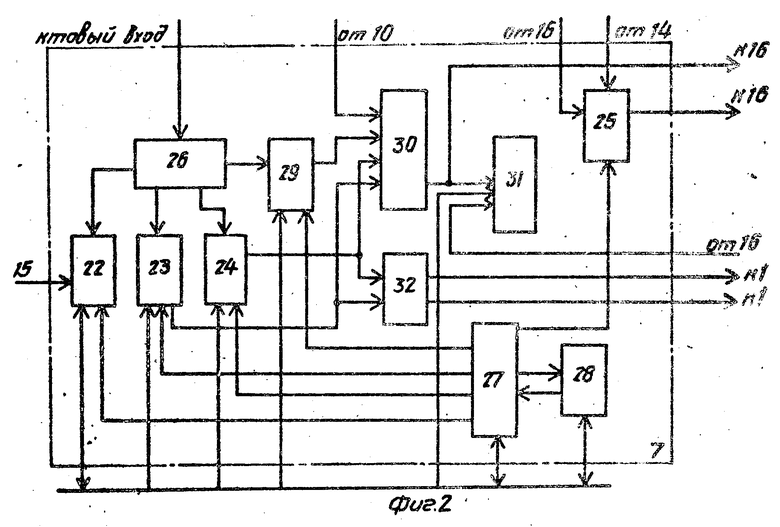
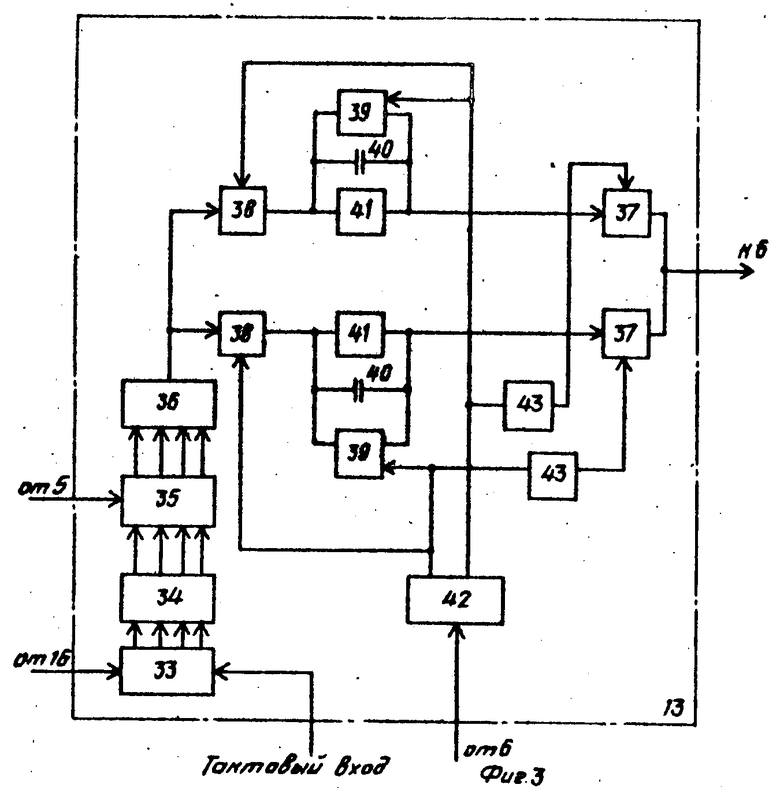
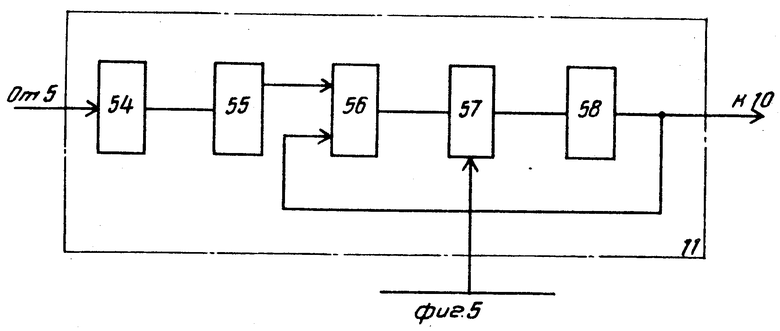
На фиг. 1 изображена блок-схема устройства; на фиг.2 блок времени; на фиг. 3 интегратор; на фиг.4 блок цифровой фильтрации; на фиг.5 блок синхpонизации с помехой; на фиг.6 блок масштабов.
Устройство содержит формирователь 1 зондирующего импульса, через трансмиттер 2, соединенный с генераторной петлей 3, приемную петлю 4, соединенную с предусилителем 5, АЦП 6, блок времени 7, арифметический блок 8, выходное устройство 9, блок цифровой фильтрации 10, блок синхронизации с помехой 11 и регистратор 12, соединенные общей шиной. Выход предусилителя 5 одновременно соединен через интегратор 13 с АЦП 6 и через блок синхронизации с помехой 11 и блок цифровой фильтрации 10 с блоком времени 7. Соединенный с генераторной петлей 3 выход трансмиттера 2 одновременно подключен к входам блока времени 7 через дискриминатор тока 14 и дополнительный АЦП 15. Выходы блока времени 7 соединены с входами формирователя зондирующего импульса 1 и блока масштабов 16, выходы которого подключены к блоку времени 7, интегратору 13 и АЦП 6. Выходы АЦП 6 соединены с интегратором 13 и арифметическим блоком 8.
Арифметический блок 8 содержит подключенные к общей шине ПЗУ 17, процессор 18 и ОЗУ 19, вход которого соединен с АЦП 6. Выходное устройство 9 содержит пульт управления 20 и контролер пульта 21, подключенный к общей шине. Блок времени 7 представлен на фиг.2 и содержит регистры кода тока 22, прямого тока 23, обратного тока 24 и начального времени 25. Ко входам регистров 22, 23, 24 подключены делитель 26 и дешифратор 27, соединенный со схемой обмена 28, регистром начального времени 25 и регистром синхронизации 29, другой вход которого подключен к делителю 26, вход которого является тактовым входом блока, а выход к схеме И 30. Выходы регистров 23 и 24 одновременно соединены со схемой И 30, выход которой соединен с триггером установки 31 и является соединенным с блоком масштабов 16 выходом блока времени 7, и мультиплексором 32, выходы которого являются выходами блока 7 и соединены с формирователем зондирующего импульса 1. Другими входами блока времени 7 являются вход регистра кода тока 22, соединенный с дополнительным АЦП 15, вход схемы И 30, соединенный с блоком цифровой фильтрации 10, входы регистра начального времени 25, соединенные с блоком масштабов 16 и дискриминатором тока 14, вход триггера установки 31, соединенный с блоком масштабов 16. Выход регистра начального времени 25 является выходом блока 7 и соединен с блоком масштабов 16. Регистры 22, 23, 24, дешифратор 27, схема обмена 28, регистр синхронизации 29 и триггер установки 31 соединены с общей шиной устройства.
Интегратор 13 представлен на фиг.3 и содержит соединенные последовательно счетчик 33, дешифратор 34, блок ключей 35 и блок резисторов 37. Один из входов счетчика 33 является тактовым входом интегратора, а другой соединен с блоком масштабов 16. Выход блока резисторов 36 соединен с ключами 37 через два идентичных канала, каждый из которых содержит ключ 38, выход которого одновременно соединен с параллельно включенными ключом 39, резистором 40 и усилителем 41. К входам ключей 38 и 39 подключен триггер 42, одновременно соединенный с ключами 37 через схемы НЕ 43. Выходом интегратора является объединенный выход ключей 37, соединенный с АЦП 6, одним из входов вход триггера 42, также соединенный с АЦП 6, а другим вход блока ключей 35, связанный с предусилителем 5.
Блок цифровой фильтрации 10 представлен на фиг.4 и содержит пороговое устройство 44, выход которого соединен со схемой сравнения кодов 45 через счетчик 46 и последовательно соединенные триггер 47 и буферный регистр 48. Выход схемы сравнения кодов 45 одновременно соединен с одним из входов триггера 47, счетчика 49 и регистра периода помехи 50. Объединенные выходы счетчика 49 и регистра 50 подключены к схеме сравнения кодов 51, а выходы регистров 50 к схеме сравнения кодов и общей шине устройства. К одному из входов регистра 50 подключены схема обмена 52, соединенная с дешифратором 53. Схема обмена 52 и дешифратор 53 также подключены к общей шине устройства. Выход схемы сравнения 51 является выходом блока 10 и соединен с блоком времени 7. Тактовым входом блока являются тактовые входы счетчиков 46 и 49 и регистров 48, 50.
Блок синхронизации с помехой 11 представлен на фиг.5 и содержит последовательно соединенные фильтр низкой частоты 54, усилитель-ограничитель 55, фазовый детектор 56, интегратор 57 и генератор 58, управляемый напряжением, выход которого одновременно соединен с блоком цифровой фильтрации 10 и фазовым детектором 56. Входом блока 11 является соединенный с предусилителем 5 вход фильтра низкой частоты 54. Интегратор 57 подключен к общей шине устройства.
Блок масштабов 16 представлен на фиг.6 и содержит последовательно соединенные счетчик 59, вход которого является тактовым входом блока, коммутатор интервалов 60, схему И 61, счетчик масштабной частоты 62, счетчик поддиапазонов 63. При этом выход схемы И 61 одновременно соединен со счетчиком 64, выход которого является выходом блока и соединен с триггером установки 31 блока времени 7, и АЦП 6, а выход счетчика масштабов 62 с интегратором 13. Один вход схемы И 61 соединен с коммутатором интервалов 60, другой с регистром начального времени 25 блока времени 7. Выходы счетчика поддиапазонов 63 подключены к коммутатору интервалов 60, а выход счетчика масштабов 62 является выходом блока и соединен с регистром начальной частоты 25 блока времени 7. Тактовым входом блока является вход счетчика 59.
Тактовые входы всех блоков подключены к генератору тактовых импульсов, на схеме не показанному.
Данное устройство реализовано на основе микропроцессорного комплекта серии К587 (в том числе процессор 18 арифметический блок 8). Работа устройства осуществляется в соответствии с управляющей программой, которая содержится в ПЗУ 17, реализованном на микросхемах серии К573РФ1 с ультрафиолетовым стиранием информации. ОЗУ 19 построено на основе микросхем К537РУ2А. Основной серией цифровых микросхем, на которых реализовано устройство, являются интегральные микросхемы серии К561, которые отличатся малым потреблением и наиболее пригодны для разработки полевой аппаратуры.
Регистры блока времени 7: кода тока 22, длительности прямого и обратного тока 23, 24, синхронизации 29, начального времени 25 реализованы на микросхемах К561 ИЕ11. Делитель частоты 26 выполнен на микросхемах К561 ИЕ10, дешифратор 27 на микросхемах К176 ИД1. Схема обмена 28 выполнена на микросхемах К561 ЛН1. Триггер 31 выполнен на микросхеме К561 ТН2. В качестве схемы И 30 используется микросхема К561 ЛА9, реализующая функцию И-НЕ. Мультиплексор 32 реализован на микросхеме К561 КП2.
Аналоговый компаратор 44 выполнен на операционном усилителе К553 УД2, счетчики 46, 49 на микросхемах К561 ИЕ10, буферные регистры 48, 50 на микросхеме К176 ИР3. Схемы сравнения кодов 45, 51 на микросхемах К561. Схема обмена 52 и дешифратор 53 выполнены соответственно на микросхемах К561 ЛН1 и К176 ИД1.
Блок синхронизации с помехой 11 содержит ФНЧ 54, усилитель-ограничитель 55 на операционном усилителе К553 УД2, фазовый детектор 56 на микросхеме К561 ЛП2, цифровой интегратор на основе цифро-аналогового преобразователя К572 ПА2Б и реверсивного счетчика К561 ИЕ11, генератор 58, управляемый на операционном усилителе К593 УД11.
Интегратор содержит счетчик 33 на микросхемах К561 ИЕ11, дешифратор 34 на микросхемах К176 ИД1, блок ключей 35, ключи 37, 38 и 39 на микросхемах К590 КН2, усилители 41 на операционных усилителях К140 УД8. Триггер 42 выполнен на микросхеме К561 ТМ2, инверторы 43 на микросхемах К561 ЛА7, реализующих функцию НЕ при объединении входов.
Блок масштабов 16 выполнен полностью на микросхемах серии К561. Счетчики 59, 62, 63, 64 выполнены на микросхемах К561 ИЕ10, К561 ИЕ11, коммутатор интервалов 60 на микросхемах К561 КП2, схема И 61 на микросхеме К561 ЛА9.
АЦП 6 выполнен на основе интегрального АЦП Е1108, сдвигового регистра К155 ИР17, компаратора К521 САЗ и микросхем серии К561.
АЦП 15 выполнен на основе интегрального аналого-цифрового двенадцатиразрядного преобразователя К572 ПВ2А.
Генераторная петля 3 и приемная петля 4 выполняются из стандартного геофизического провода типа ГПМП.
Формирователь 1 выполнен на микросхемах серии К561 и транзисторах КТ 630.
Трансмиттер 2 построен на мощных быстродействующих тиристорах ТБ 2-160 и управляющих высоковольтных вентилях ТВ-200.
Предусилитель 5 выполнен на основе операционных усилителей К140 УД6.
Контролер 21 выполнен целиком на микросхемах серии К561.
В качестве регистратора 12 может быть использован регистратор "Блокнот-1" ТК 41-04-1078-82, на основе микросхем серии К558 РР1 с электрическим стиранием информации.
Пульт управления содержит клавиатуру, обеспечивающую набор параметров индикатора "Мероприятие".
Устройство работает следующим образом.
Включают питание и на пульте управления 20 выходного устройства 9 устанавливают tзона длительность импульса тока в генераторной петле, tнач и tкон начальное и конечное время измерения переходного процесса, n необходимое количество накоплений, М количество медианных отсчетов, выбранное в зависимости от наличия и величины импульсной помехи, и задают пределы изменения периодической помехи Тпл.мин и Тпл.макс.
При отсутствии тока в генераторной петле 3 в приемной петле 4 наводится ЭДС помехи, которая поступает на вход блока синхронизации с помехой 11, который вырабатывает напряжение с частотой, равной частоте периодической помехи с точностью до фазы. Напряжение с частотой, равной частоте периодической помехи, поступает на вход блока цифровой фильтрации 10, который выделяет моменты времени (математическое ожидание), совпадающее с положениями одноименных максимумов периодической помехи, и измеряет временные интервалы между соседними среднестатистическими положениями положительных максимумов периодической помехи.
При пуске счетчики 62, 63, 64 блока масштабов 16 устанавливаются в исходное состояние импульсом с выхода триггера установки 31 блока времени 7 (соединение выхода триггера 31 с установочными входами счетчиков условно не показано).
Заданное значение длительности импульса тока tзонд и начальное время измерения tнач переписываются с пульта управления 20 в регистры тока 23, 24 и регистр начального времени 25 блока времени 7 соответственно.
Значение периода промышленной помехи Тпл.изм. записывается в регистр периода помехи 50 блока цифровой фильтрации 10.
Процессор 18 арифметического блока 8 определяет соответствие измеренного периода промышленной помехи Тпл.изм по алгоритму
Тпл.мин ≅ Тпп.изм.i ≅ Тпп.макс.
Если при этом Тпп.изм.i соответствует заданному критерию, то процессор 18, используя значение Тпп.изм.i, установленное значение начального времени tнач. и длительность зондирующего импульса tзонд. вычисляет значение временного интервала tсинхр. время, на которое должен быть задержан зондирующий импульс относительно среднестатического положения последнего максимума полупериода промышленной помехи для текущего i-го периода, используя выражение tсинхр.=1,25.Тпп.изм.i-tзонд.-tнач. (1)
Если при этом значение tсинхр(i+1) получается меньше нуля, значение измеренного периода промышленной помехи Тпп.изм.i увеличивают в целое число раз умножением на константу К=2, 3, 4 до тех пор, пока полученное значение tсинхр не станет равным нулю или больше нуля. Если измеренное значение Тпп.изм.i больше максимального или меньше минимального заданных пределов изменения промышленной помехи, то измеренное значение Тпп.изм.i игнорируется, и процессор 18 использует следующее значение Тпп.изм.I и так до тех пор, пока измеренное значение Тпп.изм.i не будет удовлетворять заданным граничным условиям. Вычисленное значение tсинхр записывается в регистр синхронизации 29 блока времени 7. Импульс, соответствующий моменту перехода периодической помехи через нуль, поступает из блока 10 на вход схемы И 30 блока времени 7, и по команде процессора 18 код, пропорциональный времени tсинхр, преобразуется во временной интервал. Через время tсинхр. процессор дает команду включить ток. Код длительности импульса положительного тока, пропорциональный времени tзонд, преобразуется во временной интервал, и импульс, соответствующий его началу, через мультиплексор 32 поступает на вход формирователя 1. Формирователь 1 включает трансмиттер 2 и в генераторную петлю 3 подается мощный импульс тока. Напряжение, пропорциональное току в генераторной петле 3, с шунта (на схеме не показан), включенного в цепь генераторной петли, подается на вход дополнительного АЦП 15, где кодируется и преобразуется в последовательный код, который подается в блок времени 7, где записывается в регистр кода тока 22, а затем через магистраль переписывается в ОЗУ 19 арифметического блока 8. Одновременно импульс тока поступает на вход дискриминатора тока 14, где по фронту выключения формируется импульс запуска, который подается на вход регистра начального времени 25 блока 7. Код, пропорциональный начальному времени измерения tнач, преобразуется во временной интервал, и по его окончании на выходе регистра начального времени 25 появляется сигнал, который по времени совпадает с моментом перехода периодической помехи через нуль и разрешает прохождение импульсов (меток времени) через схему И 61 и формирование импульсов (масштаб интегрирования) на выходе счетчика масштабов 62. Происходит развертывание описанной ранее временной шкалы, в соответствии с которой производится нормирование и интегрирование входного сигнала и измерение мгновенного значения ЭДС переходного процесса с одновременным подавлением периодической помехи 50 Гц.
Интегрирование (или усреднение по времени) основано на усреднении сигнала и помех на некотором интервале Δ tи.
Интервал времени интегрирования располагается симметрично (  ±
±  ) относительно требуемого времени измерения tизм, и проинтегрированный сигнал εи( Δ tн) относят к середине интервала. Максимальная величина Δtи ограничивается допустимой величиной возникающей при этом ошибки
) относительно требуемого времени измерения tизм, и проинтегрированный сигнал εи( Δ tн) относят к середине интервала. Максимальная величина Δtи ограничивается допустимой величиной возникающей при этом ошибки
δи= 
В худшем случае для поздней стадии переходного процесса
ε(tизм) 
εи(Δtи) 
 dt
dt
где α 
А коэффициент, зависящий от параметров установки и проводимости разреза.
Отсюда
δи= 
 1
1 
Интегрирование на интервале времени, равном 10% от величины времени измерения, не создает большой ошибки.
Рассмотрим процесс измерения ЭДС переходного процесса.
При включении импульса тока в генераторной петле 3 в приемной петле 4 наводится ЭДС переходного процесса. Аддитивная смесь сигнала переходного процесса и помех поступает на вход интегратора 13 через предусилитель 5. Импульс (масштаб интегрирования) разрешает работу счетчика 33, который через дешифратор 34 и блок ключей 35 подключает входной сигнал к соответствующему резистору блока резисторов 36, и входной сигнал нормируется в соответствии со скоростью нарастания напряжения интегратора. Собственно интегратор состоит из двух интегрирующих каскадов, каждый из которых включает в себя ключ 39, конденсатор 40 и усилитель 41. При поступлении на триггер 42 управляющего сигнала от АЦП 6 последний подключает вход одного из каскадов к выходу предусилителя 5, а вход другого к входу АЦП 6. Входной сигнал через ключ 38 поступает на первый каскад, где интегрируется в течение интервала tинт.1. К моменту окончания первого интервала tинт.1 сигнал от АЦП 6 установит триггер 42 в другое состояние, а первый каскад будет установлен в режим хранения, т. е. его вход будет отключен от выхода блока резисторов 36, а выход будет подключен ко входу АЦП 6. Проинтегрированное напряжение устанавливается в режим интегрирования, т. е. его вход подключен к блоку регистров 36, а выход отключен от входа АЦП 6, и выходное напряжение интегрируется во время второго интервала tинт.1. Таким образом, осуществляется непрерывное интегрирование и преобразование входного сигнала во время каждого из восьми интервалов tинт.1.
Через восемь интервалов tинт.1 интервал интегрирования увеличивается вдвое и становится равным tинт.2. Одновременно увеличивается импульс масштаба с выхода блока масштабов 16, в соответствии с которым ноpмируется входной сигнал переходного процесса. Затем сигнал переходного процесса интегрируется в течение восьми интервалов tинт.2 попеременно в интегрирующих каскадах блока интегратора 13 и кодируется АЦП 6.
Процесс интегрирования и кодирования сигнала продолжается на всех интервалах интегрирования. Измеренные значения сигнала переходного процесса запоминаются в ОЗУ 19 арифметического блока 8.
Аналогичным образом интегрируется и преобразуется входной сигнал переходного процесса при включении импульса тока отрицательной полярности при соответствующем развертывании временной шкалы. Измеренные значения переходного процесса от импульса тока отрицательной полярности также пересылаются в ОЗУ 19.
Проинтегрированный на всех интервалах интегрирования от
tинт= tинт.1 до tинт.к= 2

где К номер интервала (для нашего случая К=10) и измерительный сигнал переходного процесса соотносят с серединой каждого из r(K-1) интервалов интегрирования.
Значения ЭДС переходного процесса, соотнесены с серединами интервалов интегрирования, длительность которых равна  , объединяют в следующие друг за другом Q групп из 2, 4, 6 2n значений в каждой, усредняют и соотносят с серединой соответствующего группе временного отрезка, содержащего 2n интервалов интегрирования.
, объединяют в следующие друг за другом Q групп из 2, 4, 6 2n значений в каждой, усредняют и соотносят с серединой соответствующего группе временного отрезка, содержащего 2n интервалов интегрирования.
Измеренные значения ЭДС переходного процесса на приведенных временных измерениях для интервалов от tинт.1 до tинт= , после положительного и одного отрицательного импульсов tзонд обрабатывают по алгоритму парных разностей. Поскольку начала измерения tнач привязано по фазе к моменту перехода помехи через нуль, то отсчеты ЭДС, взятые в моменты действия импульса соответственно одной, а затем другой полярности, содержат составляющие сигналы, равные по величине, но противоположные по знаку. В то же время составляющие помехи имеют в таком случае равную величину и одинаковы по знаку. Если эти два отсчета вычесть, то сигнал удвоится, а, помеха будет подавлена. На интервалах tинт=
, после положительного и одного отрицательного импульсов tзонд обрабатывают по алгоритму парных разностей. Поскольку начала измерения tнач привязано по фазе к моменту перехода помехи через нуль, то отсчеты ЭДС, взятые в моменты действия импульса соответственно одной, а затем другой полярности, содержат составляющие сигналы, равные по величине, но противоположные по знаку. В то же время составляющие помехи имеют в таком случае равную величину и одинаковы по знаку. Если эти два отсчета вычесть, то сигнал удвоится, а, помеха будет подавлена. На интервалах tинт=  интегрирование осуществляется за целое число периодов, поскольку интеграл суммы равен сумме интегралов. Таким образом, одновременно с подавлением случайных помех с нормальным распределением осуществляется подавление помехи 50 Гц.
интегрирование осуществляется за целое число периодов, поскольку интеграл суммы равен сумме интегралов. Таким образом, одновременно с подавлением случайных помех с нормальным распределением осуществляется подавление помехи 50 Гц.
Обработанные таким образом r(K-1) значений, соотнесенных с серединами интервалов интегрирования от tинт.1 до tинт.к и Q усредненных значений накапливают в ОЗУ 19.
Для защиты от импульсных помех определяют медианные значения из (2n-1)[r(K-1)+Q] результирующих измерений и запоминают их.
Серии из (2n-й) измерений для определения медианных значений повторяют М раз, пока не будет выполнено заданное количество медианых накоплений. Данные измерений записываются в регистратор 12 или могут быть введены на индикатор пульта управления 20.
Если на пульте управления 20 выходного устройства 9 задано только начальное время измерения tнач переходного процесса, то в этом случае работа устройства реализуется по способу-прототипу. То есть определяется время tсинхр в соответствии с формулой, которое записывается в регистр синхронизации 29 блока времени 7. Начиная от прихода импульса, соответствующего моменту перехода помехи через нуль, отсчитывается время tсинхр, затем длительность зондирующего импульса tзонд и начальное время измерения переходного процесса tнач, и в момент его окончания, который соответствует моменту перехода помехи через нуль, производится сначала интегрирование входного сигнала, а затем измерение мгновенного значения ЭДС переходного процесса. Далее одного значения tинт временная шкала не развертывается, а происходит измерение одного значения ЭДС переходного процесса после tнач от воздействия зондирующего импульса отрицательной полярности. Измеренные значения ЭДС от воздействия разнополярных импульсов обрабатываются по алгоритму парных разностей, и результирующее измерение записывается в регистратор 12 или выводится на индикатор пульта управления 20.
Способ позволяет повысить производительность электроразведочных работ и одновременно подавлять случайные с нормальным распределением Пуассона помехи.
Энергетические и временные затраты в предлагаемом способе значительно ниже. Например, при заданном временной шкалой количестве отсчетов [r(K-1)+Q] по способу-прототипу следует сделать М(2n-1)[r(K-1)+Q] зондирующих импульсов, а по предлагаемому способу только М(2n-1). При r=8tнач=100 мкс, и tконец= 10 мс r(K-1)+Q=75, т.е. энергетические затраты снижаются в 75 раз. Временные затраты снижаются несколько меньше за счет потерь на поздних временах измерения. Увеличение степени подавлению шумов и помех объясняется совместным применением способов аналогового и цифрового интегрирования. На ранней и средней стадии переходного процесса это обеспечивается постепенным увеличением времени аналогового интегрирования до  на поздней стадии аналоговым интегрированием за время
на поздней стадии аналоговым интегрированием за время  с последующим усреднением за 2n интервалов
с последующим усреднением за 2n интервалов  где n=1, 2, 3 и т.д. Одновременно осуществляется подавление периодических помех, поскольку время интегрирования кратно периоду промышленной помехи.
где n=1, 2, 3 и т.д. Одновременно осуществляется подавление периодических помех, поскольку время интегрирования кратно периоду промышленной помехи.
Предлагаемый способ и устройство для его осуществления реализованы в аппаратуре цифровой электроразведочный "Цикл-2". Испытания показали, что уровень собственных шумов по сравнению со способом-прототипом снижен в 8 раз и не превышает 0,5 мкв на всех временах измерения при разрешающей способности 0,1 мкв.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006886C1 |
| Генераторная установка электроразведочной станции | 1990 |
|
SU1728828A1 |
| СПОСОБ ПРЯМОГО ПОИСКА ГЕОЛОГИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2111514C1 |
| Способ геоэлектроразведки и устройство для его осуществления | 1986 |
|
SU1423974A1 |
| ПРЕОБРАЗОВАТЕЛЬ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН В ЦИФРОВОЙ КОД | 1991 |
|
RU2020745C1 |
| УЛЬТРАЗВУКОВОЙ ТОЛЩИНОМЕР | 2001 |
|
RU2185600C1 |
| Устройство для определения положения зоны с неравномерной освещенностью | 1987 |
|
SU1490479A1 |
| Устройство синхронизации электроразведочных приемников | 1987 |
|
SU1449961A1 |
| Цифровой частотомер | 2019 |
|
RU2730047C1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТРАНСПОРТНОГО ЗАПАЗДЫВАНИЯ СИГНАЛА В ТЕХНОЛОГИИ И ТЕХНИКЕ СВЯЗИ | 2003 |
|
RU2258938C2 |


Изобретение относится к области измерительной техники и может быть использовано в устройствах для геоэлектроразведки методом переходных процессов и зондированием поля. Целью изобретения является повышение разрешающей способности при одновременном снижении энергетических и временных затрат. Увеличение степени подавления шумов и помех достигается совместным применением способов аналогового и цифрового интегрирования. На ранней и средней стадиях переходного процесса обеспечивается постепенное увеличение времени аналогового интегрирования до Tпп/4, где Tпп - период промышленной помехи, на поздней стадии - аналоговым интегрированием за время Tпп/4 с последующим усреднением на 2n интервалов Tпп/4, где n = 1,2,3, и т.д. Одновременно осуществляется подавление периодических помех, поскольку время интегрирования кратно периоду промышленной помехи. Способ реализован в цифровой электроразведочной аппаратуре. Уровень шумов по сравнению с известными способами снижен в 8 раз и не превышает 0,5 мкВ на всех временах измерения при разрешающей способности 0,1 мкВ. 2 с.п. ф-лы, 6 ил.
tсинхр(i+1) = 1,25 Tпп.изм.i- tзонд-tнач,
для случая tпп.макс≥ Tпп.изм.i≥ Tпп.мин
и tсинхр.(i+1) = 1,25 Tпп.ср.-tзонд-tнач,
для случая Tпп.мин> Tпп.изм.i> Tпп.макс,
где Tпп.изм.i измеренное в i-м периоде значение периода промышленной помехи;
Tпп.макс и Tпп.мин предельные заданные значения периода промышленной помехи;
tзонд длительность зондирующего импульса;
Tпп.ср. среднее арифметическое значение периода промышленной помехи,
разбивают диапазон времени измерения переходного процесса на интервалы интегрирования, выбирая минимальную длительность интервала tинт.i равной  и через каждые r одинаковых интервалов изменяя длительность в соответствии с выражением
и через каждые r одинаковых интервалов изменяя длительность в соответствии с выражением
до тех пор, пока для К-го интервала длительность станет равной
после чего оставляют величину интервала равной  до конца диапазона времени измерения, после каждого зондирующего импульса нормируют сигнал переходного процесса для каждого из полученных интервалов интегрирования, измеряют полученные после интегрирования значения на всех интервалах интегрирования, измеренные значения соотносят с серединой соответствующего интегрирования, значения, соотнесенные с серединами интервалов интегрирования, длительность которых равна
до конца диапазона времени измерения, после каждого зондирующего импульса нормируют сигнал переходного процесса для каждого из полученных интервалов интегрирования, измеряют полученные после интегрирования значения на всех интервалах интегрирования, измеренные значения соотносят с серединой соответствующего интегрирования, значения, соотнесенные с серединами интервалов интегрирования, длительность которых равна  объединяют в следующие друг за другом группы из 2n(n 1,2,3.) значений в каждой, усредняют и Q усредненных значений соотносят с серединой соответствующего группе временного отрезка, запоминают r(К 1) значений, соотнесенных с серединами интервалов интегрирования от tинт 1 до tинт.(K-1), и Q усредненных значений и определяют медианные значения из (2n 1) [r(К 1) + Q] результирующих измерений.
объединяют в следующие друг за другом группы из 2n(n 1,2,3.) значений в каждой, усредняют и Q усредненных значений соотносят с серединой соответствующего группе временного отрезка, запоминают r(К 1) значений, соотнесенных с серединами интервалов интегрирования от tинт 1 до tинт.(K-1), и Q усредненных значений и определяют медианные значения из (2n 1) [r(К 1) + Q] результирующих измерений.
| Авторское свидетельство СССР N 1127436, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
