Изобретение относится к электротехнике и может быть использовано в качестве исполнительного элемента для прецизионных перемещений.
Известно устройство, содержащее три привода, расположенных между перемещаемой треугольной платформой и опорной поверхностью под углом к ней [1] . Недостатком устройства является невозможность поворота устройства на опорной поверхности из-за того, что приводы не могут поворачиваться относительно перемещаемой треугольной платформы. Кроме того, недостатком устройства является невозможность движения устройства по кривой опорной поверхности или наклонной плоскости, так как оно на ней не фиксируется и сила тяжести будет сталкивать его.
Известно также устройство, содержащее привод в виде треугольной пластины из пьезокерамического материала, в углах которой находятся фиксаторы [2] . Недостатком устройства является то, что оно не может поворачиваться на опорной поверхности, так как привод выполнен в виде сплошной треугольной пластины, а при этом не могут изменяться углы между линиями, проходящими через центры фиксаторов.
Наиболее близким по технической сущности является устройство [3] , взятое в качестве прототипа. Устройство содержит приводы, собранные в жесткую прямоугольную раму, в углах которой находятся электромагнитные фиксаторы, и источник питания. Недостатком устройства является то, что оно не может поворачиваться относительно фиксатора или центра масс, так как для этого необходимо, чтобы прямоугольная рама, собранная из приводов, могла при их удлинении трансформироваться в ромб или другую четырехугольную фигуру, что в данном устройстве невозможно, поскольку приводы не могут поворачиваться относительно друг друга. Кроме того, устройство не может без специальных конструкторских и технологических приемов двигаться по кривой поверхности. Это обусловлено тем, что у устройства, имеющего четыре и более точек опоры, одна опора за счет разброса допусков будет висеть в пространстве, что может привести к невозможности точно позиционировать устройство на кривой поверхности.
Целью изобретения является расширение функциональных возможностей за счет обеспечения перемещения по угловой координате и криволинейной поверхности.
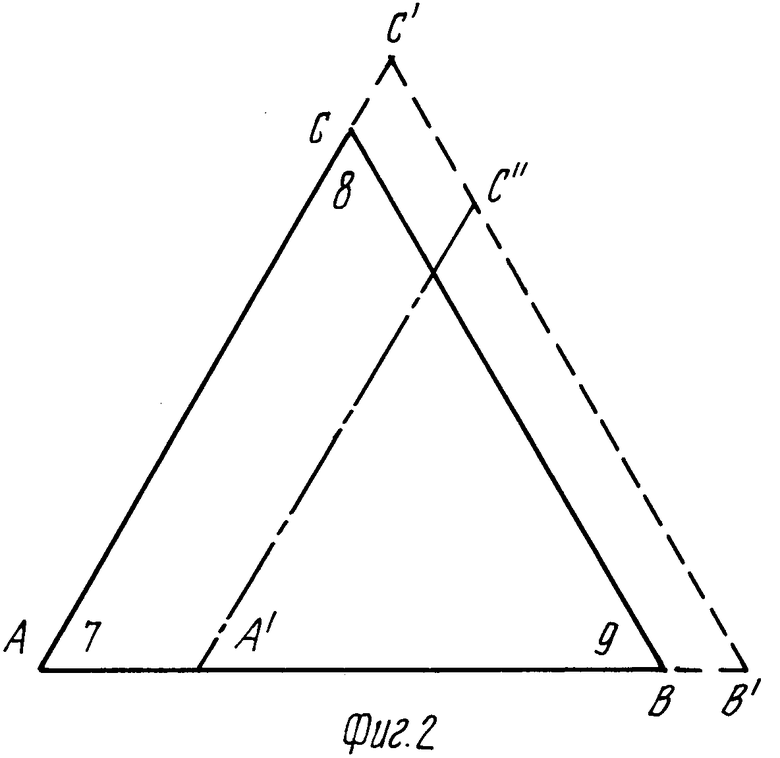
На фиг. 1 показано устройство прецизионных перемещений; на фиг. 2 и 3 - схемы, поясняющие движение устройства; на фиг. 4 - схема вращения устройства.
Устройство содержит приводы в виде многозаходных цилиндрических пружин 1-3 из магнитострикционного материала, на витках которых расположены обмотки 4-6 управления. Фиксаторы 7-9 соединены посредством шарниров 10-15 с пружинами 2, 1, 3, образующими стороны равностороннего треугольника, причем оси шарниров связаны с фиксаторами и перпендикулярны плоскости треугольника. Пружины электрически соединены в треугольник, который электрически разорван слоем диэлектрика 16 и в месте разрыва подключен к источнику питания. Фиксаторы 7-9 - приставные электромагниты, лежащие на поверхности из ферромагнитного материала 17.
Устройство работает следующим образом.
Пропустим по треугольнику ток, поляризующий материал пружин. При отсутствии напряжения на обмотках 4-6 управления устройство занимает исходное положение АВС, показанное на фиг. 2-4. При подаче напряжения на обмотки 4-6 управления в каждом сечении витка пружин 1-3 возникают закручивающие магнитоупругие напряжения. Эти напряжения трансформируются пружинами в линейные перемещения торцов пружин параллельно их осям, а эти линейные перемещения вызывают увеличение или уменьшение высот пружин 1-3, а следовательно, и длин сторон треугольника АВС.
Рассмотрим движение устройства параллельно стороне АВ. Цикл движения устройства показан на фиг. 2 и состоит: из закрепления фиксатора 7, увеличения длин всех сторон треугольника, открепления фиксатора 7, закрепления фиксатора 9, уменьшения длин всех сторон треугольника. Продолжая описанный цикл движения, мы получаем перемещение треугольника параллельно стороне АВ.
Рассмотрим движение треугольника перпендикулярно стороне АВ. Цикл движения устройства показан на фиг. 3 и состоит: из закрепления фиксаторов 7 и 9, увеличения длин двух сторон треугольника, открепления фиксаторов 7 и 9, закрепления фиксатора 8, уменьшения длин тех же двух сторон треугольника. Продолжая описанный цикл движения, мы получаем перемещение треугольника, перпендикулярное стороне АВ. Аналогично можно продвигать треугольник параллельно или перпендикулярно любой его стороне.
Рассмотрим подробно вращение треугольника, например, вокруг фиксатора 7. Закрепим фиксаторы 7 и 8, отпустим фиксатор 9 и подадим на обмотку 5 напряжение. Пружина 2 удлинится, а треугольник займет положение AB'C, показанное на фиг. 4. Отпустим фиксатор 8, закрепим фиксатор 9 и снимем напряжение с обмотки 5. Пружина 2 вернется в первоначальное состояние, а треугольник займет положение AB'C' (фиг. 4), то есть он повернется относительно фиксатора 7. Продолжая описанный цикл вращения, получаем поворот треугольника около точки А. Аналогично можно вращать треугольник относительно любого фиксатора. При вращении треугольника его приводы (стороны) поворачиваются относительно друг друга и он деформируется, но при снятии напряжения с обмоток 4-6 треугольник возвращается в свою исходную форму, что является свойством треугольника, поскольку тон - жесткая фигура. Из всех правильных фигур только треугольник обладает свойством жесткости, а только устройство, имеющее три точки опоры, может устойчиво фиксироваться на кривой опорной поверхности. Подключив источник питания в месте разрыва, мы обеспечиваем равенство тока в каждой пружине и тем самым избежим тепловых деформаций треугольника, а кроме того, это значительно упрощает схему управления и уменьшает количество проводов, подходящих к устройству. (56) 1. Авторское свидетельство СССР N 529509, кл. Н 01 L 21/26, 1976.
2. Surface science, 126 (1983), p. 236-244.
3. Авторское свидетельство СССР N 922919, кл. Н 01 L 41/10, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ | 1992 |
|
RU2051344C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ОТНОШЕНИЯ ТОКОВ В НАГРУЗКАХ | 1991 |
|
RU2035060C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1992 |
|
RU2032191C1 |
| УСТРОЙСТВО СОПРЯЖЕНИЯ ИМПУЛЬСНЫХ ДАТЧИКОВ С БЛОКОМ ОБРАБОТКИ ИНФОРМАЦИИ | 1989 |
|
RU2024047C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ОТНОШЕНИЯ ТОКОВ В НАГРУЗКАХ | 1991 |
|
RU2035061C1 |
| СПОСОБ МЕТАЛЛИЗАЦИИ КРЕМНИЕВЫХ ПОДЛОЖЕК | 1992 |
|
RU2010032C1 |
| СПОСОБ АКУСТОЭМИССИОННОГО КОНТРОЛЯ ИЗДЕЛИЙ | 1991 |
|
RU2006855C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ФЕРРОМАГНИТНЫХ ИЗДЕЛИЙ | 1991 |
|
RU2051381C1 |
| Магнитострикционный преобразователь | 1990 |
|
SU1747189A1 |
| Электромагнитное силовое устройство | 1990 |
|
SU1788497A1 |



Использование: в качестве исполнительного элемента для прецизионных перемещений. Сущность изобретения: устройство содержит электромагнитные фиксаторы, соединенные приводами, и источник питания. Приводы выполнены в виде многозаходных пружин из магнитострикционного материала, а на витках пружин намотаны обмотки управления. Пружины электрически соединены в треугольник, который разорван и в месте разрыва подключен к источнику питания. Фиксаторы выполнены в виде приставных электромагнитов, лежащих на поверхности из ферромагнитного материала. Фиксаторы соединены с приводами, образующими стороны равностороннего треугольника посредством плоских шарниров. 4 ил.
УСТРОЙСТВО ПРЕЦИЗИОННЫХ ПЕРЕМЕЩЕНИЙ ПО ПОВЕРХНОСТИ ИЗ ФЕРРОМАГНИТНОГО МАТЕРИАЛА, содержащее электромагнитные фиксаторы, соединенные приводами, выполненными из магнитострикционного материала с размещенными на них обмотками управления, источник питания, отличающееся тем, что, с целью расширения функциональных возможностей за счет обеспечения перемещения по угловой координате и криволинейной поверхности, приводы выполнены в виде многозаходных цилиндрических пружин, образующих стороны равностороннего треугольника и соединенных с фиксаторами посредством шарниров, оси которых связаны с фиксаторами, перпендикулярно плоскости треугольника, причем пружины соединены в последовательную электрическую цепь, разорванную в месте соединения одного из приводов с одним из шарниров и в месте разрыва подключенную к источнику питания.
