Изобретение относится к измерительной технике и может использоваться в информационно-измерительных системах и информационно-вычислительных комплексах (ИВК) для коррекции погрешностей аналого-цифрового преобразования, связанных с нелинейностью и с изменением параметров функции преобразования.
Известны итерационные способы коррекции погрешностей аналого-цифрового преобразователя [1] , а также применение кусочно-линейной аппроксимации участков характеристики преобразователя в алгоритмах коррекции [2] . Недостатком указанных способов является тот факт, что алгоритмы коррекции не учитывают изменение во времени входного сигнала, что ограничивает область их применения.
Наиболее близок к изобретению способ коррекции погрешностей аналого-цифрового преобразования [3] , где в алгоритме коррекции используется метод решения нелинейной задачи, известный как метод касательных Ньютона. Этот способ обеспечивает коррекцию погрешностей аналого-цифрового преобразования с высокой точностью и быстродействием, однако изменение входного сигнала во времени алгоритм коррекции не учитывает.
Целью изобретения является повышение точности коррекции погрешностей для случая аналого-цифрового преобразования изменяющихся во времени сигналов.
Отличие от прототипа предполагаемого способа коррекции заключается в том, что два предыдущих значения скорректированного кода входного сигнала запоминаются, что позволяет ввести в алгоритм вычисления скорректированного кода входного сигнала динамическую поправку на изменение входного сигнала во времени. Динамическая поправка является результатом линейной экстраполяции временной зависимости входного сигнала на данный j-й интервал коррекции погрешностей, содержащей nj циклов, за счет использования результатов n(j-1) и n(j-2) циклов коррекции.
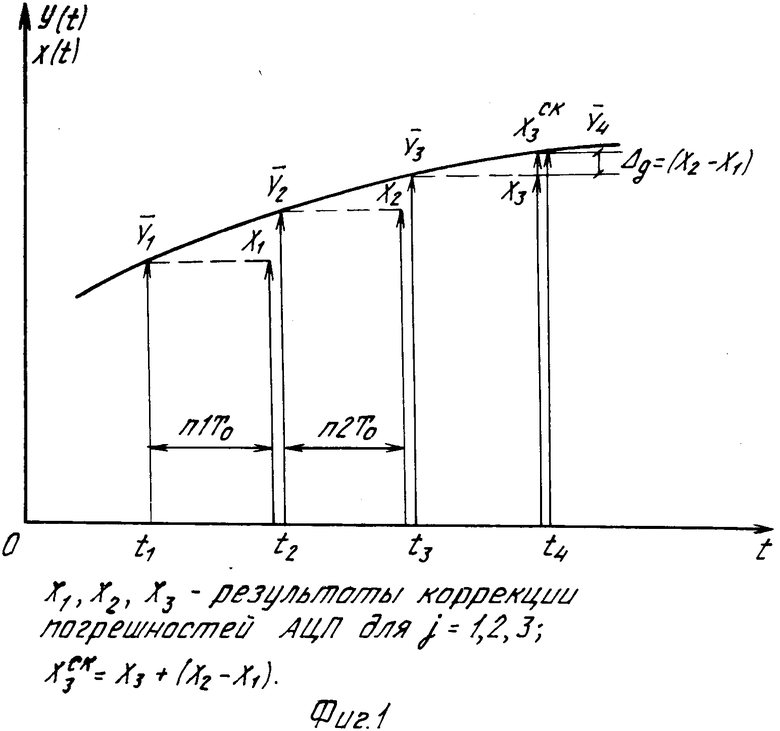
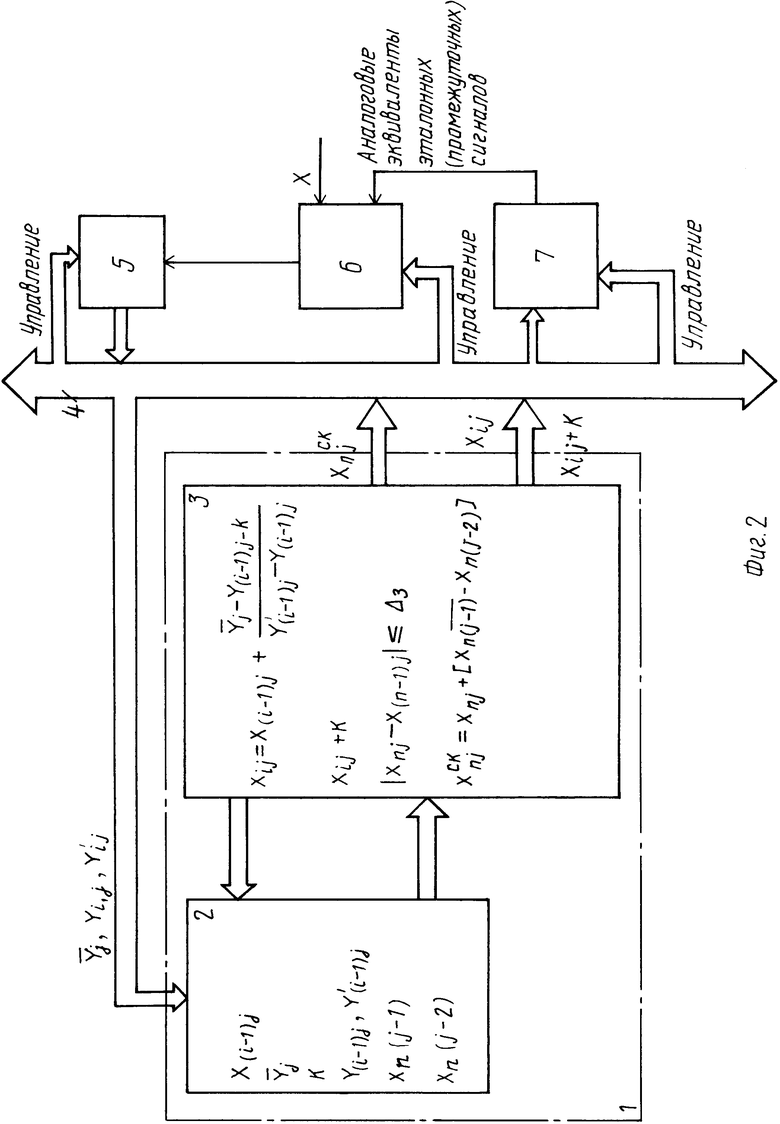
Формирование алгоритма коррекции с динамической поправкой показано на фиг. 1. Реализация прилагаемого способа коррекции иллюстрируется на ИВК, блок-схема которого представлена на фиг. 2.
В ИВК входят вычислительный комплекс 1 с оперативным запоминающим устройством 2 и вычислителем 3, магистраль 4 типа "общая шина", аналого-цифровой преобразователь (АЦП) 5, входной коммутатор 6 аналоговых сигналов и прецизионный цифроаналоговый преобразователь (ЦАП) 7.
Управление АЦП, ЦАП и коммутатором осуществляет ИВК через магистраль "общая шина", с помощью которого также производится обмен информацией между вычислителем и измерительными преобразователями.
ИВК, реализующий данный способ, действует следующим образом.
Входной сигнал, например, пусть изменяется как показано на фиг. 1. Поскольку ИВК многократно подключает входной сигнал в силу его изменения во времени, для различения n циклов коррекций при разных значениях входного сигнала вводят индекс j измерений этих циклов коррекций, т. е. в дальнейшем оперируют nj циклами коррекций погрешности преобразованных с помощью АЦП входных сигналов.
В предлагаемом способе используется известный принцип линейной экстраполяции временной зависимости входного сигнала, что можно записать в виде
x
(1)
Для каждого j коррекция погрешностей аналого-цифрового преобразования входного сигнала подчиняется итерационной формуле
xij = x(i-1)j+{ [ -Y(i-1)j] /[Y
-Y(i-1)j] /[Y
 ] } ·K
] } ·K
i = 1,2,3, . . .
j = 1,2,3, . . . где i - нумерация циклов коррекции погрешностей аналого-цифрового преобразования;
j - нумерация последовательности nj циклов коррекции погрешностей аналого-цифрового преобразования;
xij, x(i-1)j - скорректированные коды входных сигналов в i-й и (i-1)-й циклы коррекций для j-го преобразования входного сигнала; = F(
= F( ) - результат j-го аналого-цифрового преобразования значения
) - результат j-го аналого-цифрового преобразования значения  входного сигнала;
входного сигнала;
Y(i-1)j= F(x(i-1)j/β);
Y = F[(x(i-1)j+K)/B]
= F[(x(i-1)j+K)/B]
- результаты аналого-цифрового преобразования первого и второго промежуточных сигналов;
К - код величины образцового сигнала;
β- коэффициент передачи ЦАП.
Интервалы временной последовательности определяются длительностью njTo циклов коррекции, где То - длительность одного цикла коррекции.
Останов цикла коррекций происходит по признаку xnj - x(n-1)j
xnj - x(n-1)j ≅Δ3 , где Δ3 - заданная величина погрешности коррекции;
≅Δ3 , где Δ3 - заданная величина погрешности коррекции;
xnj - скорректированный код входного сигнала в конце цикла коррекций.
Для j = 1 и j = 2 соответственно xn1 и xn2 не имеют динамическую поправку. Начиная с j = 3, в выражения для скорректированных кодов входных сигналов вводятся динамические поправки Δg, учитывающие изменение входного сигнала во времени:
x
Δд= { [xn(j-1)-xn(j-2)] /[n(j-1)To] } ·njTo.
Для вычисления динамической поправки из вычислителя 3 ИВК в запоминающее устройство 3 поступают коды xnj, где они запоминаются на два интервала nj, что позволяет решить задачу экстраполяции входного сигнала.
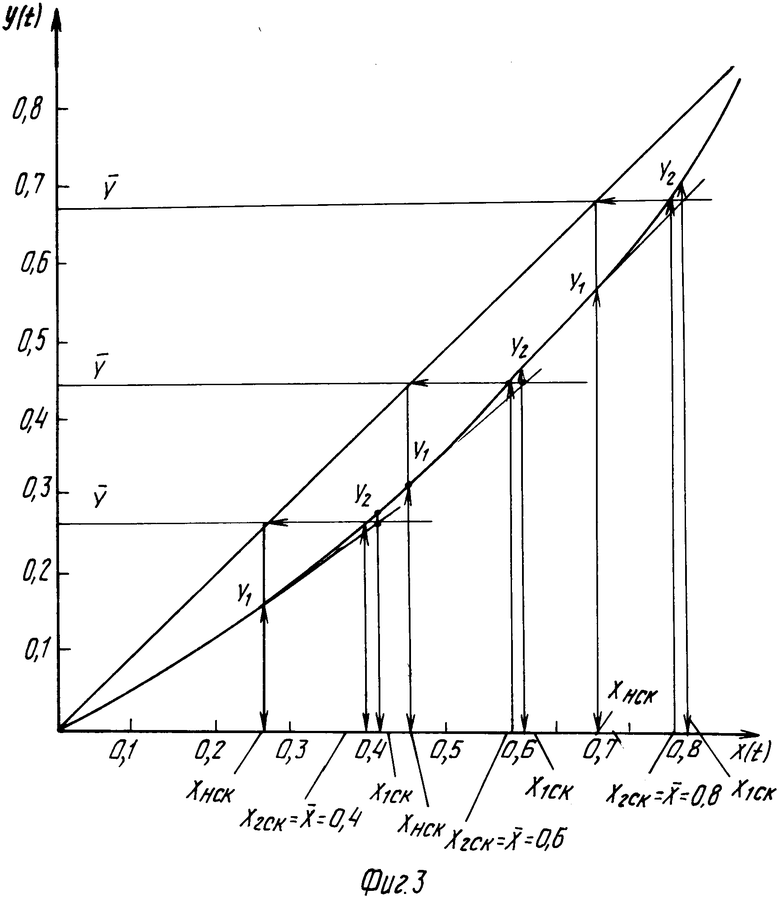
Анализ зависимости nj от j показывает, что можно принять nj = n(j-1). Это можно показать на примере характеристики АЦП вида y = x + cx(1-x); c = 0,5 (фиг. 3).
Для трех примеров преобразования входного сигнала при  = 0,4,
= 0,4,  = 0,6 и
= 0,6 и  = 0,8 количество циклов коррекции равно двум (на фиг. 3 не показано преобразование второго промежуточного сигнала). В силу этого формулу 1 можно использовать в более простой записи:
= 0,8 количество циклов коррекции равно двум (на фиг. 3 не показано преобразование второго промежуточного сигнала). В силу этого формулу 1 можно использовать в более простой записи:
xnjск = xnj + [xn(j-1) - xn(j-2)] . (56) 1. Алиев Т. М. и др. Автоматическая коррекция погрешностей цифровых измерительных приборов. М. : Энергия, 1975.
2. Авторское свидетельство СССР N 984030, кл. Н 03 М 1/06, 1982.
3. Авторское свидетельство СССР N 1714808, кл. Н 03 М 1/10, 1992.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции погрешностей аналого-цифрового преобразователя | 1989 |
|
SU1714808A1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 1993 |
|
RU2085033C1 |
| Устройство для автоматического определения характеристик аналого-цифровых преобразователей в динамическом режиме | 1987 |
|
SU1520655A1 |
| Следящий аналого-цифровой преобразователь | 1985 |
|
SU1417189A1 |
| Способ преобразования амплитуды напряжения переменного тока в код и устройство для его осуществления | 1988 |
|
SU1540000A1 |
| Способ аналого-цифрового преобразования и устройство для его осуществления | 1983 |
|
SU1203698A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И ЗАДАТЧИК ПРОБНЫХ СИГНАЛОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2131139C1 |
| Устройство для оценивания функции распределения | 1987 |
|
SU1481796A1 |
| Цифровая система измерения и обработки | 1979 |
|
SU877565A1 |
| Статистический анализатор | 1987 |
|
SU1499376A1 |
Изобретение относится к измерительной технике и может использоваться в информационно-измерительных системах и измерительно-вычислительных комплексах для коррекции погрешностей аналого-цифрового преобразования, связанных с нелинейностью и изменением параметров функции преобразования. Целью изобретения является исключение динамической погрешности в работе коррекции при преобразовании изменяющихся во времени сигналов. Цель достигается за счет запоминания двух предыдущих значений скорректированного кода входного сигнала, при этом процесс коррекции осуществляется согласно итерационной формуле:  , где i - циклы коррекций. Останов цикла коррекции происходит по признаку
, где i - циклы коррекций. Останов цикла коррекции происходит по признаку  , при этом скорректированный выходной код, начиная с j = 3, содержит динамическую поправку на изменение во времени входного сигнала X
, при этом скорректированный выходной код, начиная с j = 3, содержит динамическую поправку на изменение во времени входного сигнала X
СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ, заключающийся в формировании кода, пропорционального входному аналоговому сигналу, с последующим его запоминанием, осуществлении n циклов коррекции, в первом из которых формируют первый промежуточный аналоговый сигнал, пропорциональный запомненному коду, после чего формируют второй промежуточный аналоговый сигнал путем добавления к первому промежуточному аналоговому сигналу образцового сигнала, затем последовательно формируют коды, пропорциональные первому и второму промежуточным аналоговым сигналам, с последующим их запоминанием, вычисляют скорректированный код входного аналогового сигнала по кодам, пропорциональным входному аналоговому сигналу и двум промежуточным аналоговым сигналам, запоминают его и сравнивают с запомненным кодом, пропорциональным входному аналоговому сигналу, если полученная разность не превышает наперед заданную величину, формируют выходной код, равный скорректированному коду, в противном случае осуществляют следующие циклы коррекции, в которых первый промежуточный сигнал формируют пропорциональным запомненному в предыдущем цикле коррекции скорректированному коду, второй промежуточный сигнал формируют путем добавления к первому промежуточному сигналу образцового сигнала, вычисляют скорректированный код и запоминают его, сравнивают с вычисленным в предыдущем цикле значением скорректированного код, по полученной разности осуществляют останов циклов коррекции на условиях первого цикла, отличающийся тем, что, с целью повышения точности коррекции, вычисление скорректированного кода осуществляют в соответствии с формулой
xij = x(i-1)j+  K+ [xn(j-1)-xn(j-2)]
K+ [xn(j-1)-xn(j-2)]
где i = 1, . . . , n - нумерация циклов коррекции погрешностей аналого-цифрового преобразования;
j - нумерация последовательности nj циклов коррекции погрешностей аналого-цифрового преобразования входного сигнала, где интервалы временной последовательности определяются длительностью njT0циклов коррекции;
T0 - длительность одного цикла коррекции;
xij ; x(i-1)j - скорректированные коды входных сигналов в i-й и (i - 1)-й циклы коррекций для j-го преобразования входного сигнала; = F(x
= F(x
Y(i-1)j= F - результат аналого-цифрового преобразования первого промежуточного сигнала;
- результат аналого-цифрового преобразования первого промежуточного сигнала;
Y(i-1)j= F - результат аналого-цифрового преобразования второго промежуточного сигнала;
- результат аналого-цифрового преобразования второго промежуточного сигнала;
K - код величины образцового сигнала;
β - коэффициент передачи аналого-цифрового преобразователя;
[xn(j-1)-xn(j-2)] - динамическая поправка, учитывающая изменение во времени входного сигнала.
