Изобретение относится к автоматике и вычислительной технике и может быть использовано для автоматического измерения положения объекта.
Преобразователи перемещения в код нашли широкое применение в различных отраслях промышленности, в частности в станкостроении. К преобразователям углового перемещения в код предъявляются жесткие требования по точности преобразования, ресурсу, сохранению точностных параметров в эксплуатации.
Преобразователь углового перемещения в код состоит из датчика угла, преобразующего первичную информацию в электрический сигнал, и электронного блока Наиболее распространенными датчиками угла являются синусо-косинусные вращающиеся трансформаторы (СКВТ). Для преобразователей с СКВТ в амплитудном или фазовом режиме характерна погрешность преобразования, обусловленная неортогональностью обмоток, неравенством коэффициентов трансформации между входными и выходными обмотками СКВТ и отклонениями параметров питания датчика от требуемых при эксплуатации преобразователя. При этом погрешности каждого образца датчика угла, обусловленные указанными выше факторами, достаточно стабильны и могут быть учтены при эксплуатации преобразователя, в то время как погрешности из-за нестабильности параметров питания датчика изменяются в зависимости от температуры окружающей среды, хранения преобразователя, наработки и других внешних воздействующих факторов. Это особенно характерно для высокоточных преобразователей перемещения в код с СКВТ с торцовыми печатными обмотками-индуктосинами, обладающими высокой точностью преобразования углового перемещения в электрический сигнал и стабильностью параметров в эксплуатации.
Известен преобразователь перемещения в код, в котором питание двух входных ортогональных обмоток индуктосина осуществляется широтно-амплитудно-импульсными сигналами, изменяющимися по длительности и амплитуде в функции числа, пропорционального взаимному положению входных и выходных обмоток датчика [1] .
Недостатком преобразователя является большая погрешность преобразования, обусловленная несоответствием амплитуд сигналов питания датчика угла требуемым значениям.
Известен также преобразователь перемещения в код, в котором питание двух входных ортогональных обмоток датчика угла осуществляется импульсными сигналами, длительность которых является функцией числа, пропорционального взаимному положению входных и выходных обмоток датчика [2] .
Как и в первом случае недостатком преобразователя является большая погрешность преобразования, обусловленная несоответствием амплитуд сигналов питания датчика требуемым значениям.
Наиболее близким по технической сущности к изобретению является преобразователь перемещения в код [3] , содержащий задающий генератор, цифроаналоговый преобразователь (ЦАП), датчик перемещений, усилитель, интегратор, блок управления, блок компараторов, два ключа и реверсивный счетчик, причем выходы ЦАП подключены к первому и второму входам датчика перемещений, выход которого через усилитель подключен к первому входу блока управления, первый и второй выходы которого соединены соответственно с первым и вторым входами реверсивного счетчика, а третий и четвертый выходы подключены к первым входам первого и второго ключей соответственно, выходы реверсивного счетчика подключены к цифровым входам ЦАП, соединенного аналоговым входом с выходом задающего генератора и входом интегратора, выход которого соединен с входом блока компараторов, первый выход которого подключен к второму входу блока управления, а второй выход - к вторым входам первого и второго ключей, выходы которых соединены со счетными входами реверсивного счетчика.
В этом преобразователе на выходах ЦАП формируются два синусоидальных сигнала питания датчика, амплитуды которых промодулированы в функции синуса и косинуса числа, зафиксированного в реверсивном счетчике. Сигнал рассогласования, формируемый на выходной обмотке датчика, с помощью фазочувствительного устройства управляет работой реверсивного счетчика. При этом блок управления формирует сигналы, задающие знак на входы сложения и вычитания реверсивного счетчика и ограничивающие интервал подсчета импульсов в счетчике моментом времени, при котором значение кода, зафиксированное в реверсивном счетчике, соответствует нулевому значению сигнала рассогласования на выходе фазочувствительного устройства.
Недостатком такого преобразователя является ограниченная точность преобразования углового перемещения в код, обусловленная несоответствием амплитуд сигналов питания датчика требуемым значениям.
Цель изобретения заключается в повышении точности преобразователя.
Цель достигается тем, что в преобразователь перемещения в код, содержащий генератор, выход которого соединен с входом интегратора и с опорными входами первого и второго ЦАП, выходы которых соединены с входами датчика, выход которого через усилитель соединен с первым входом первого фазочувствительного выпрямителя, второй вход которого подключен к выходу интегратора, а выход соединен с входом первого преобразователя напряжения в частоту, положительный и отрицательный выходы которого соединены соответственно с входами сложения и вычитания первого реверсивного счетчика, счетчика, выходы которого являются выходами преобразователя и соединены с входами первого и второго преобразователей кодов, выходы последнего из которых соединены цифровыми входами первого ЦАП, первый и второй коммутаторы и компаратор, введены инвертор, третий и четвертый ЦАП, первый и второй сумматоры, второй фазочувствительный выпрямитель, второй преобразователь напряжения в частоту, второй реверсивный счетчик, цифровой мультиплектор и третий преобразователь кодов, выходы которого соединены с цифровыми входами второго ЦАП, выход которого и выход первого ЦАП соединены с информационными входами соответственно первого и второго коммутаторов, при этом выход генератора соединен с первым входом второго фазочувствительного выпрямителя и входом компаратора, выход которого соединен с управляющим входом цифрового мультиплексора, с входом инвертора и первыми управляющими входами первого и второго коммутаторов, вторые управляющие входы которых подключены к выходу инвертора, первые выходы соединены с входами опорного напряжения соответственно третьего и четвертого ЦАП, а вторые выходы - с входами опорного напряжения соответственно четвертого и третьего ЦАП, выходы которых соединены с входами первого сумматора, выход которого соединен с вторым входом фазочувствительного выпрямителя, выход которого соединен с входом второго преобразователя напряжения в частоту, положительный и отрицательный выходы которого соединены с входами соответственно сложения и вычитания второго реверсивного счетчика, выходы которого соединены с первой группой входов второго сумматора, вторая группа входов которого подключена к выходам первого реверсивного счетчика, а выходы соединены с входами третьего преобразователя кодов, выходы первого и второго преобразователей кодов соединены соответственно с первой и второй группами информационных входов цифрового мультиплексора, первая и вторая группы выходов которого соединены с цифровыми входами соответственно третьего и четвертого ЦАП.
Сопоставительный анализ с прототипом показывает, что заявляемый преобразователь отличается наличием новых блоков: инвертора, двух ЦАП, двух сумматоров, фазочувствительного выпрямителя, преобразователя напряжения в частоту, реверсивного счетчика, цифрового мультиплексора и преобразователя кодов. Таким образом, он соответствует критерию изобретения "новизна".
Сравнение заявляемого решения не только с прототипом, но и с другими техническими решениями в данной области техники показывает, что указанные блоки широко известны. Однако при их введении в указанной связи с остальными блоками в заявляемый преобразователь углового перемещения в цифровой код они проявляют новые свойства, что приводит к повышению точности преобразователя за счет компенсации несоответствия амплитуд сигналов питания датчика, требуемым значениям. Это позволяет сделать вывод о соответствии технического решения критеpию "существенные отличия".
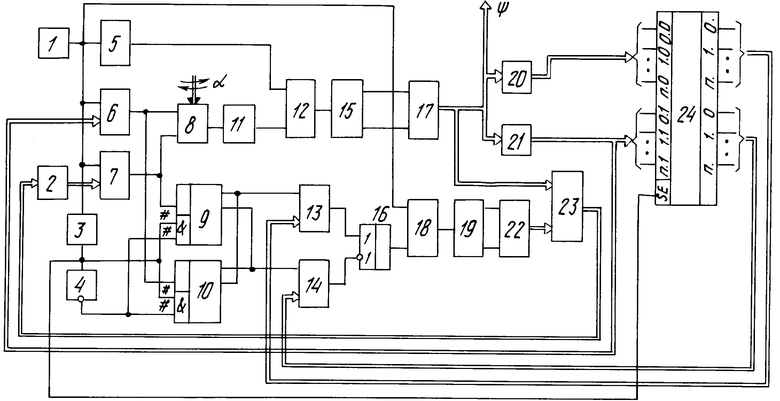
На чертеже представлена функциональная схема преобразователя перемещения в код.
Преобразователь перемещения в код содержит генератор 1, преобразователь 2 кодов, компаратор 3, инвертор 4, интегратор 5, ЦАП 6, 7, датчик 8, коммутаторы 9, 10, усилитель 11, фазочувствительный выпрямитель 12, ЦАП 13, 14, преобразователь 15 напряжения в частоту, сумматор 16, реверсивный счетчик 17, фазочувствительный выпрямитель 18, преобразователь 19 напряжения в частоту, преобразователи 20, 21 кодов, реверсивный счетчик 22, сумматор 23, цифровой мультиплексор 24.
Выход генератора 1 соединен с входами компаратора 3, интегратора 5, первым входом фазочувствительного выпрямителя 18 и входами опорного напряжения ЦАП 6 и 7, выходы которых соединены соответственно с входами коммутаторов 10 и 9 и первым и вторым входами датчика 8, соединенного выходом через последовательно включенный усилитель 11 с первым входом фазочувствительного выпрямителя 12, второй вход которого соединен с выходом интегратора 5, а выход - с входом преобразователя 15 напряжения в частоту. Положительный и отрицательный выходы последнего соединены соответственно с входами сложения и вычитания реверсивного счетчика 17, выходы которого являются выходами преобразователя перемещения в код и соединены с первой группой входов сумматора 23, через последовательно включенный преобразователь 20 кодов с первой группой входов цифрового мультиплексора 24, через последовательно включенный преобразователь 21 кодов с цифровым входом ЦАП 6 и второй группой входов цифрового мультиплексора 24. Первая и вторая группы выходов мультиплексора соединены соответственно с цифровыми входами ЦАП 13 и 14, а управляющий вход соединен с выходом компаратора 3, объединенными первыми управляющими входами коммутаторов 9, 10 и входом инвертора 4, соединенного выходом с объединенными вторыми управляющими входами коммутаторов 9, 10, первые объединенные выходы которых соединены с входом опорного напряжения ЦАП 13, а вторые объединенные выходы с входом опорного напряжения ЦАП 14. Выход ЦАП 14 соединен с вторым входом сумматора 16, соединенного первым входом с выходом ЦАП 13, а выходом - с вторым входом фазочувствительного выпрямителя 18, выход которого соединен с входом преобразователя 19 напряжения в частоту, соединенного положительным и отрицательным выходами соответственно с входами сложения и вычитания реверсивного счетчика 22. Выходы счетчика 22 соединены с второй группой входов сумматора 23, соединенного выходами через последовательно включенный преобразователь 2 кодов с цифровым входом ЦАП 7.
Преобразователь перемещения в код работает следующим образом.
При включении источника питания (на чертеже не показан) на выходах реверсивного счетчика 17 устанавливается произвольное значение кода Ψi, которое преобразуется преобразователями 20 и 21 в коды cos Ψiи sin Ψi соответственно. На выходе реверсивного счетчика 22 устанавливается произвольное значение кода θi, а на выходе сумматора 23 значение кода равно Ψi + θi. Это значение кода преобразуется преобразователем 2 в код cos(Ψi + θi). Генератор 1 формирует синусоидальное напряжение Umsin ω t, поступающее на входы компаратора 3, интегратора 5, первый вход фазочувствительного выпрямителя 18 и входы опорного напряжения ЦАП 6 и 7. На выходах ЦАП 6 и 7 формируются пропорциональные значениям входных кодов токи Im1 sin ω t . sinΨi и Im2 sin ω t . cos(Ψi + θi), возбуждающие индукционный синусно-косинусный датчик 8 перемещений.
В результате дифференцирования токов возбуждения значение напряжения на выходе усилителя 11 равно
U1 = K3. cos ωt[Um1 K1.sin Ψi cosp α +
+ Um2.K2. cos( Ψi+ θi) . sinpα ] , (1) где К1 и К2 - коэффициенты трансформаци датчика 8 соответственно от второй и первой обмоток;
К3 - коэффициент усиления усилителя 11;
р - число пар полюсов датчика 8;
α - угол поворота ротора датчика 8.
Напряжение U1 поступает на первый вход фазочувствительного выпрямителя 12, на второй вход которого поступает напряжение с выхода интегратора 5, сдвигающего на 90о синусоидальное напряжение генератора 1. На выходе фазочувствительного выпрямителя 12 формируется напряжение
U2 = K4. [Um1 K1. sin Ψi. cosp α +
+ Um2 K2. cos( Ψi + θi) .sinp α] , (2) где К4 - произведение коэффициента усиления усилителя 11 и коэффициента передачи фазочувствительного выпрямителя.
Импульсы с положительного или отрицательного выхода преобразователя 15 напряжения в частоту в зависимости от знака напряжения U2 поступают на вход сложения или вычитания реверсивного счетчика 17, изменяя значение кода Ψi на его выходах. При этом значение напряжения U2 уменьшается до нуля, т. е.
Um1. K1. sin Ψα. cosp α +
+ Um2. K2 cos( Ψα + θα)sinpα = 0, (3) где Ψα - установившееся значение кода на выходе реверсивного счетчика 17;
θα - установившееся значение кода на выходе реверсивного счетчика 22.
На выходе компаратора 3 формируется напряжение прямоугольной формы, соответствующее значению логической "1" в течение первой половины напряжения Um. sin ωt и значению логического "0" в течение второй половины периода синусоидального напряжения. Напряжение с выхода компаратора 3 инвертируется инвертором 4.
В течение первого полупериода напряжения Umsin ωt и указанных управляющих сигналов на управляющих входах коммутаторов 9 и 10 на входах опорных напряжений ЦАП 13 и 14 формируются сигналы Um1 sin ωt sin Ψ1 и Um2 sin ωt cos(Ψi+θi ) соответственно. При наличии на выходе компаратора 3 сигнала логической "1", поступающей на вход управления цифрового мультиплексора 24, на цифровые входы ЦАП 13 и 14 с выходов цифрового мультиплексора 24 поступают коды cos Ψi и sin Ψiсоответственно. При этом на выходе сумматора 16 формируется напряжение
U3 = sin ωt [K5. Um1 sinΨi cosΨi -
- K6Um2 cos( Ψi+θi ) sin Ψi ] , (4) где К5 и К6 - произведения коэффициентов передачи ЦАП 13 и 14 и коэффициентов передачи сумматора 16 по первому и второму входам соответственно.
Напряжение U3 поступает на второй вход фазочувствительного выпрямителя 18, на выходе которого формируется сигнал
U4 = K5Um1 sin Ψi cos Ψi-
- K6Um2 cos( Ψi+θi )sin Ψi . (5)
В течение второго полупериода напряжения Umsin ωt сигналы на управляющих входах коммутаторов 9, 10 и цифрового мультиплексора 24 изменяются на обратные. При этом на входах опорных напряжений ЦАП 13 и 14 формируются сигналы Um2 sin ωt cos( Ψi+θi ) и Um1 sin ωt sin Ψi , а на цифровые входы с выходов цифрового мультиплексора 24 поступают коды sinΨi и cos Ψi соответственно. На выходе фазочувствительного выпрямителя 18 формируется напряжение
U5 = K5Um2 cos( Ψi+θi )sinΨi -
- K6Um1 sinΨi cos Ψi . (6)
Напряжения U4 и U5 поступают на вход преобразователя 19 напряжения в частоту, который формирует на положительном или отрицательном выходе в зависимости от знаков напряжений U4 и U5импульсы, поступающие соответственно на вход сложения или вход вычитания реверсивного счетчика 23, изменяя значение кода θi на его выходах. При этом значения напряжений U4 и U5 уменьшаются до тех пор, пока суммарное значение напряжения на выходе фазочувствительного выпрямителя 18 не станет равным нулю. Это условие может быть записано следующим образом:
Um1 sin Ψα cos Ψα (K5 - K6) +
+ Um2. cos(Ψα+θα) .
. sin Ψα(K5 - K6) = 0, (7)
Из уравнения (7) может быть определено значение
cos( Ψα+θα) = -cos Ψα. Um1/Um2.
Подставив значение cos(Ψα+θα) в уравнение (3), определяют значение угла
α = 1/p arctg(K1/K2. tg Ψα).
Таким образом, погрешность преобразования углового перемещения в цифровой код не зависит от несоответствия амплитуд сигналов питания датчика требуемым значениям.
Введение инвертора 4, ЦАП 13, 14, сумматоров 16, 23, фазочувствительного выпрямителя 18, преобразователя 19 напряжения в частоту, реверсивного счетчика 22, цифрового мультиплексора 24 и преобразователя 2 кодов позволяет компенсировать погрешность преобразования углового перемещения в двоичный код, обусловленную отклонением амплитуд сигналов питания датчика 8 от требуемых значений, повысив тем самым точность преобразователя перемещения в код.
Положительный эффект предлагаемого преобразователя заключается в повышении точности преобразования за счет компенсации его погрешности, вызванной несоответствием амплитуд сигналов питания датчика требуемым значениям.
В результате экспериментальных исследований макетного образца преобразователя перемещения в код с датчиком-индуктосином с числом пар полюсов р = 128, амплитудными значениями токов питания 200 мА и частотой токов питания 10 кГц получены следующие результаты. При отклонении значений токов питания датчика от расчетных значений на 8% погрешность преобразователя-прототипа достигала 32 угл. с, а погрешность предлагаемого преобразователя, работающего в тех же условиях, не превышала 2,15 угл. с.
Таким образом, экспериментальные исследования макетного образца преобразователя подтвердили эффективность введения новых блоков и связей. (56) 1. Патент США N 3789393, кл. 340-347, опублик. 1974.
2. Авторское свидетельство СССР N 746651, кл. Н 03 М 1/64, 1980.
3. Патент США N 3537102, кл. 340-347, опублик. 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСЛЕДОВАТЕЛЬНОГО КОДА В ПАРАЛЛЕЛЬНЫЙ | 1990 |
|
RU2007865C1 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ | 1990 |
|
RU2006903C1 |
| СПОСОБ КОНТРОЛЯ ЦИФРОВЫХ СЕЙСМОРЕГИСТРИРУЮЩИХ КАНАЛОВ | 1991 |
|
RU2040019C1 |
| Преобразователь перемещения в код | 1988 |
|
SU1569988A1 |
| СЧЕТЧИК АКТИВНОЙ ЭНЕРГИИ С ЧАСТОТНЫМ ВЫХОДОМ | 1992 |
|
RU2037830C1 |
| ИНТЕГРАТОР С БОЛЬШИМ ВРЕМЕНЕМ ИНТЕГРИРОВАНИЯ | 1992 |
|
RU2034331C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2007 |
|
RU2356162C1 |
| Корреляционный измеритель фазовой постоянной цепи | 1988 |
|
SU1624348A1 |
| ПРЕЦИЗИОННЫЙ ФОЛЬГОВЫЙ РЕЗИСТОР | 1990 |
|
RU2046418C1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для автоматического измерения углового положения объекта. Цель изобретения - повышение точности преобразователя, которая достигается за счет компенсации погрешности преобразователя, вызванной несоответствием амплитуд сигналов питания датчика требуемым значениям, для чего преобразователь перемещения в код содержит генератор, три преобразователя кодов, инвертор, компаратор, интегратор, четыре цифроаналоговых преобразователя, датчик, два коммутатора, усилитель, два фазочувствительных выпрямителя, два преобразователя напряжения в частоту, два сумматора, два реверсивных счетчика и цифровой мультиплексор. В преобразователе осуществляются формирование цифрового кода, пропорционального ошибке преобразования угла, и учет его значения в процессе определения истинного значения угла поворота ротора датчика. 1 ил.
ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД, содержащий генератор, выход которого соединен с входом интегратора и с опорными входами первого и второго цифроаналоговых преобразователей, выходы которых соединены с входами датчика, выход которого через усилитель соединен с первым входом первого фазочувствительного выпрямителя, второй вход которого подключен к выходу интегратора, а выход соединен с входом первого преобразователя напряжения в частоту, положительный и отрицательный выходы которого соединены соответственно с входами сложения и вычитания первого реверсивного счетчика, выходы которого являются выходами преобразователя и соединены с входами первого и второго преобразователей кодов, выходы последнего из которых соединены с цифровыми входами первого цифроаналогового преобразователя, первый и второй коммутаторы и компаратор, отличающийся тем, что, с целью повышения точности преобразователя, в него введены инвертор, третий и четвертый цифроаналоговые преобразователи, первый и второй сумматоры, второй фазочувствительный выпрямитель, второй преобразователь напряжения в частоту, второй реверсивный счетчик, цифровой мультиплексор и третий преобразователь кодов, выходы которого соединены с цифровыми входами второго цифроаналогового преобразователя, выход которого и выход первого цифроаналогового преобразователя соединены с информационными входами соответственно первого и второго коммутаторов, выход генератора соединен с первым входом второго фазочувствительного выпрямителя, с входом компаратора, выход которого соединен с управляющим входом цифрового мультиплексора, с входом инвертора и первыми управляющими входами первого и второго коммутаторов, вторые управляющие входы которых подключены к выходу инвертора, первые выходы соединены с входами опорного напряжения соответственно третьего и четвертого цифроаналоговых преобразователей, а вторые выходы - с входами опорного напряжения соответственно четвертого и третьего цифроаналоговых преобразователей, выходы которых соединены с входами первого сумматора, выход которого соединен с вторым входом второго фазочувствительного выпрямителя, выход которого соединен с входом второго преобразователя напряжения в частоту, положительный и отрицательный выходы которого соединены с входами соответственно сложения и вычитания второго реверсивного счетчика, выходы которого соединены с первой группой входов второго сумматора, вторая группа входов которого подключена к выходам первого реверсивного счетчика, а выходы соединены с входами третьего преобразователя кодов, выходы первого и второго преобразователей кодов соединены соответственно с первой и второй группами информационных входов цифрового мультиплексора, первая и вторая группы выходов цифрового мультиплексора соединены с цифровыми входами соответственно третьего и четвертого цифроаналоговых преобразователей.
