Изобретение относится к гидроакустике и может быть использовано при создании гидроакустических систем обнаружения подводных объектов, например косяков рыб или отдельных морских животных.
Известен гидролокатор, имеющий несколько приемопередатчиков и производящий обзор в широком секторе водного пространства.
Наиболее близким техническим решением является гидролокатор, осуществляющий поиск, обнаружение и классификацию рыбных скоплений на дистанциях до 3500-4000 м.
Используемые в гидролокаторах рабочие частоты находятся в пределах от 20 до 50 кГц. Дальность действия гидролокаторов ограничивается многими факторами и, в первую очередь, рефракцией звуковых лучей, большим затуханием высокочастотных сигналов.
К недостаткам известного технического решения следует отнести:
- ограниченную дальность действия;
- большую мощность излучения.
Целью изобретения является повышение эффективности обнаружения подводных объектов, т. е. согласование параметров зондирующего сигнала со структурными особенностями, возникшими в среде при проходе объектов, выражающиеся в более сильном ослаблении зондирующего сигнала при проходе через траекторию объекта.
Цель достигается тем, что контролируемое пространство облучают набором тонально-модулированных сигналов, частоты которых рассчитывают по формулам
fi=  ; (1)
; (1)
Fi=  (2) где Z - классовый номер обнаруживаемого объекта;
(2) где Z - классовый номер обнаруживаемого объекта;
fi и Fi - частоты несущей и модуляционной составляющих зондирующего сигнала;
CZiиViZi- скорости звука и объекта на глубине движения;
Loi - длина объекта;
γi- безразмерная величина, характеризующая удаленность объекта от границы раздела вода-воздух;
li - характерный размер энергонесущих вихрей в возмущенной среде, определяемый по формулам
li=  ; F
; F =
=  , Cвв - скорость внутренних волн.
, Cвв - скорость внутренних волн.
На приемном конце в соответствии с этим набором производят расфильтровку принятого сигнала, детектируют каждый частотный канал и по величине ослабления компонент зондирующего сигнала относительно фонового уровня судят о наличии, размерах и параметрах движения подводных объектов.
Сущность изобретения заключается в том, что зондирующий сигнал согласуется как с пространственной линейной решеткой из подводных объектов, шаг которой задается величиной γi, Loi, так и с внутренним заполнением неоднородностей, заданных шагом решетки энергонесущими вихрями с характерным размером li.
В устройстве для обнаружения подводных объектов цель достигается тем, что в техническое решение, состоящее на передающем конце из последовательно соединенных излучателя, усилителя мощности, задающего генератора и модулятора, а на приемном конце - приемной антенны усилителя, детектора и индикатора, дополнительно введены на передающем конце блоки набора несущих и модуляционных частот, а модулятор и задающий генератор выполнены многоканальными, выходы блоков набора несущих и модуляционных частот соединены с соответствующими входами модулятора и задающего генератора соответственно, а на приемном конце между усилителем и детектором включен многоканальный частотный фильтр, а детектор выполнен в виде набора N детекторов, выходы которых соединены с входами индикатора.
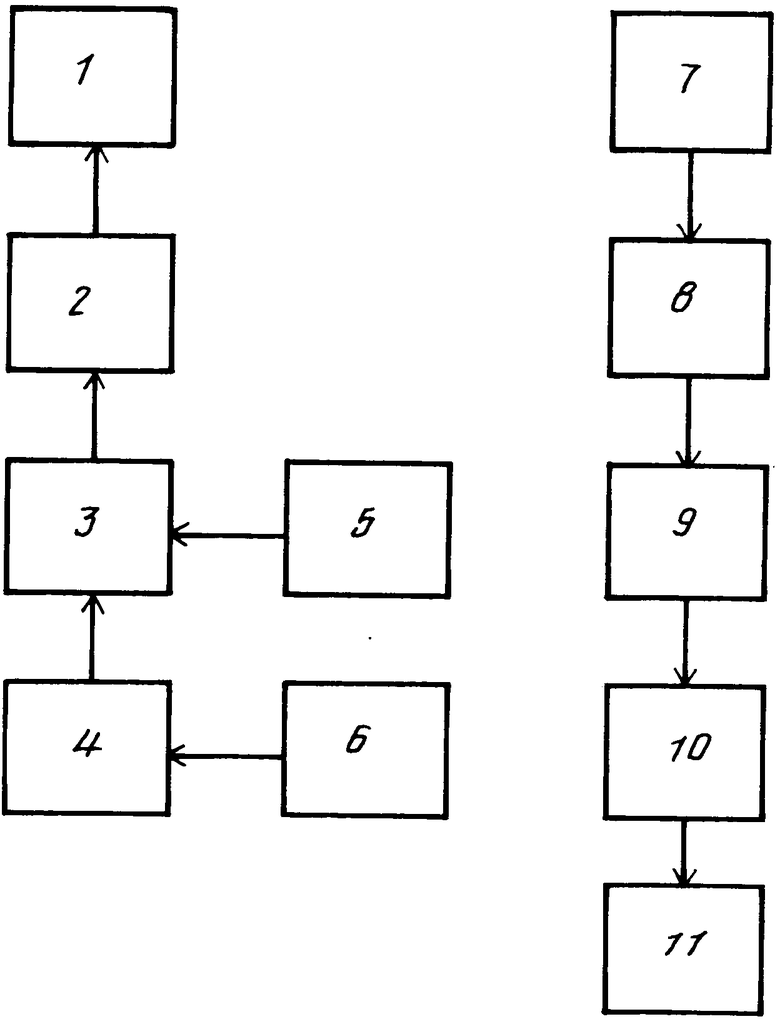
На чертеже представлена функциональная схема устройства, где 1 - излучатель, 2 - усилитель мощности, 3 - задающий генератор, 4 - модулятор, 5 - блок набора несущих частот, 6 - блок набора модуляционных частот, 7 - приемная антенна, 8 - усилитель, 9 - многоканальный частотный фильтр, 10 - набор N детекторов, 11 - индикатор.
Устройство работает следующим образом.
Задающий генератор 3 формирует набор несущих частот fi, выработанных в блоке 5 набора несущих частот. Этот набор несущих частот модулируется модулятором 4 соответствующим набором модуляционных частот Fi, сформированных в блоке 6 набора модуляционных частот. Усиленный усилителем 2 мощности набор несущих частот fi, промодулированных модуляционными частотами Fi, подается на излучатель 1, который осуществляет последовательное облучение водного пространства этим набором частот. В удаленной на требуемую дистанцию приемной части принимается излученный сигнал приемной системой 7 и через усилитель 8 подается на многоканальный частотный фильтр 9.
Расфильтрованный сигнал с каждого канала частотного фильтра поступает на свой детектор из набора N детекторов 10. Продетектированные сигналы регистрируются на индикаторе 11. По величине и длительности ослабления компонент излученного сигнала судят о наличии, размерах и параметрах движения подводных объектов. (56) Патент Японии N 56-95543, кл. G 01 S 15/96, 1981.
Кобяков Ю. С. и др. Конструирование гидроакустической рыбопоисковой аппаратуры. Л. : Судостроение, 1986, с. 27.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ МОРСКИХ ЖИВОТНЫХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2021721C1 |
| Способ ультразвуковой деструкции веществ и устройство для его осуществления | 1988 |
|
SU1590134A1 |
| Способ определения наличия утечек в трубопроводах и устройство для его осуществления | 1989 |
|
SU1657988A1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2366973C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2365938C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| Н. С. Ю. П. Скачков, Б. В, Фелисов и Н. И. Гри^ Арктический и Антарктический научно-исследовател | 1966 |
|
SU183412A1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645016C1 |
Изобретение относится к гидроакустике и может быть использовано при создании гидроакустических систем обнаружения подводных объектов. Цель изобретения - повышение эффективности обнаружения подводных объектов, т. е. согласование параметров зондирующего сигнала со структурными особенностями, возникшими в среде при проходе объектов, выражающееся в более сильном ослаблении зондирующего сигнала при распространении через местонахождение объектов. В основе технического решения лежит облучение контролируемого пространства набором тонально-модулированных сигналов, несущие и модуляционные частоты которых выбраны в соответствии с предполагаемыми размерами объектов, их положением относительно поверхности водоема и скорости. Принятый сигнал расфильтровывают в соответствии с измеренным, детектируют каждый канал и по ослаблению соответствующих компонент судят о наличии, размерах и параметрах движения объектов. Устройство для обнаружения подводных объектов содержит излучатель, усилитель мощности, задающий генератор, модулятор, блок набора несущих частот, блок набора модуляционных частот, приемную антенну, усилитель, многоканальный частотный фильтр, низкоканальный детектор, индикатор. 2 с. п. ф-лы, 1 ил.
fi= 
Fi= 
где fi и Fi - частоты несущей и модуляционной составляющих зондирующего сигнала;
czi и vizi - скорости звука и объекта на глубине движения;
Loi - длина объекта;
γi - безразмерная величина, характеризующая удаленность объекта от границ раздела вода - воздух;
i - классовый номер обнаруживаемого объекта;
li - характерный размер экранирующих вихрей в возмущенной среде, определяемый по формулам
li= 
F =
= 
где Cв.в - скорость распространения внутренних волн в среде,
облучают подводные объекты набором тонально-модулированных сигналов, принимают прошедший через скопление подводных объектов излученный сигнал, расфильтровывают, детектируют каждую частотную компоненту и по величине ослабления компонент зондирующего сигнала судят о наличии, размерах и параметрах движения подводных объектов.
