Изобретение относится к воздействию на поведение морских животных и может быть использовано при защите объектов от медуз.
Известен способ [1], основанный на открытии, полученном из наблюдений за поведением медуз при излучении последовательности акустических импульсов мощностью 1 Вт на частотах в диапазоне 2,0-3,2 кГц. Как оказалось, ненаправленное излучение в указанном диапазоне частот заставляет медуз подниматься с глубины к поверхности моря. Цикл излучений от 5 до 15 мин оказался более результативным.
В книге Кобяков Ю.С., Кудрявцев Н.Н., Тимошенко В.И. Конструирование гидроакустической рыбопоисковой аппаратуры. Л.: Судостроение, 1986 [2] указывается на актуальность вопроса управления поведением рыб и приводятся общие требования к сигналам биологических промысловых объектов.
В указанном источнике делается ссылка на созданные образцы аппаратуры, имеющей широкополостные тракты излучения с регулируемой частотой.
Известна аппаратура "Пастух излучает звуки, отпугивающие рыбу, - звуки врагов рыбы путем переизлучения".
Недостатком всех этих технических решений является то, что они являются частными, решают узкие задачи, касаются конкретного объекта, при этом достигается кратковременный эффект.
Предлагается более общее техническое решение, основанное на выработанном в процессе эволюции морских животных рефлексе, который управляет их поведением на основе автоматического анализа звуков, возникающих при их движении.
Целью изобретения является получение нужной поведенческой реакции морских животных, например отпугивание медуз от того или иного района моря.
Это в способе достигается тем, что акустические сигналы модулируют по амплитуде, при этом несущую и модуляционную частоты определяют по формулам
F =  (1), (1)
(1), (1)
f =  , (2) где L - характерный размер хищника (жертвы);
, (2) где L - характерный размер хищника (жертвы);
v - характерная скорость движения хищника (жертвы);
c - скорость распространения акустической энергии в среде;
κ- отстояние источника излучения от поверхности раздела вода-воздух;
F - модуляционная частота;
f - несущая частота.
Для достижения цели в устройство, содержащее генератор незатухающих, колебаний, акустическую систему и коммутатор передачи, введены модулятор, изменяющий параметры незатухающих колебаний, и блок управления излучением, изменяющий длительность тонально-модулированного сигнала, скважность и мощность, при этом модулятор, генератор незатухающих колебаний, коммутатор передачи и акустическая система соединены последовательно, а блок управления излучением подключен к входам модулятора, генератора и коммутатора.
Известно (Несос К. Н. Выгодно ли кальмарам быть глухими? - Природа, 1986, N 3, с. 95), что хищные рыбы и кальмары реагируют только на тонально-модулированные сигналы. Инфразвуки образуются в результате срыва вихрей с поверхности обтекаемых тел. Частота таких вихрей прямо пропорциональна скорости потока (движения морского животного) и обратно пропорциональна размеру обтекаемого тела FF =  .
.
При этом генерируются акустические колебания в среде, как результат акустической эмиссии избыточной энергии, подводимой к среде источником на частоте f, промодулированной частотой срыва вихрей F. В силу единства материального процесса вихреобразования и акустического излучения из (1) и (2) нетрудно получить оценки подходящих частот - несущей и модуляционной для более адекватной имитации сигнала опасности.
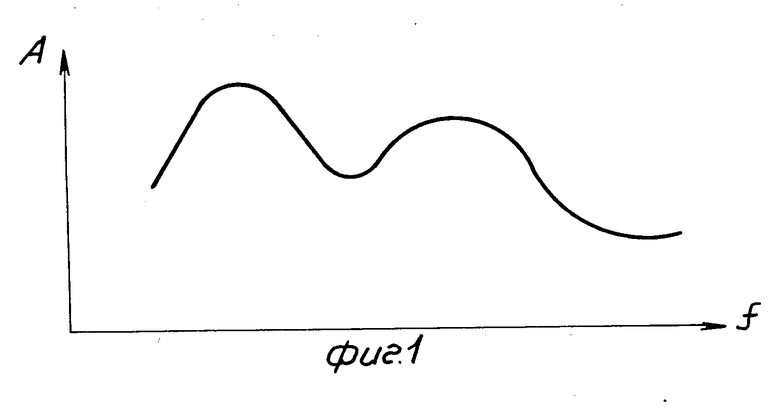
На фиг. 1 приведены обобщенные спектры микросейм, возбуждаемых штормовыми морскими волнами, из которых хорошо видны два энергетических максимума на частотах F≈0,05 Гц и f≈0,2 Гц.
П р и м е р 1 (Монахов Ф.И. Низкочастотный сейсмический шум Земли, с. 49).
Поскольку эти две частоты являются инвариантными характеристиками шторма, о приближении которого можно судить как по нарастанию их амплитуды, так и по скорости процесса, то имитируя шторм излучением на частоте f = 0,2 Гц, промодулированной частотой F = 0,05 Гц, можно добиться от морского животного адекватной реакции на штормовую опасность.
Известно, что при приближении шторма медузы удаляются от берега.
П р и м е р 2. Известно (Большая Советская Энциклопедия. М.: Советская Энциклопедия, 1973, т. 11), что кальмары являются естественными врагами моллюсков, рыб, медуз. Поэтому, имитируя шум, сопровождающий движение кальмаров при их охоте за пищей, можно добиться адекватной реакции объектов питания кальмаров. Так как характерные размеры кальмаров составляет 0,25-0,5 м, а скорости движения их при охоте составляют v = 10-20 м/с, нетрудно оценить возможный частотный диапазон несущих и модуляционных составляющих шумоизлучения, генерируемый кальмарами.
Из (1) и (2) имеем
F =  = 3÷13 Гц,
= 3÷13 Гц,
f =  = 6÷24 кГц
= 6÷24 кГц
Из примера 2 видно, что, если характерный размер кальмара 0,25 м, скорость движения 10 м/с, скорость звука 1500 м/с, то f = 24 кГц, а F = 6,6 Гц.
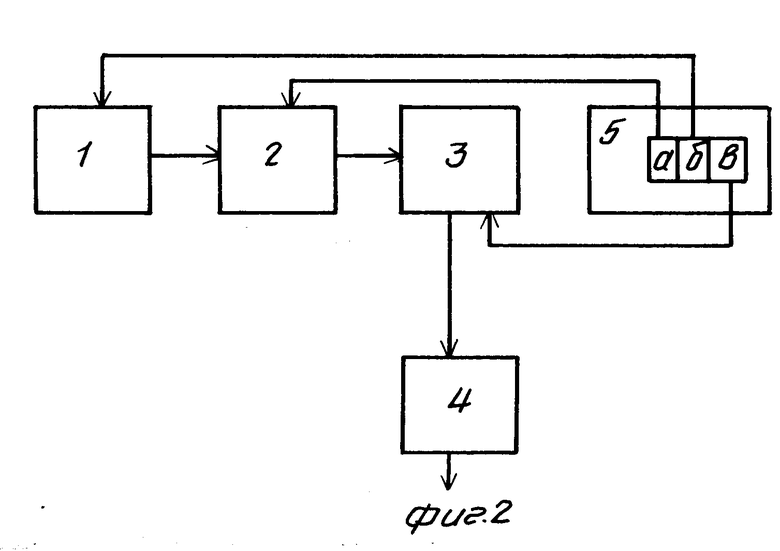
На фиг. 2 приведена блок-схема устройства, где позицией 1 обозначен модулятор, 2 - генератор, 3 - коммутатор передачи, 4 - акустическая система, 5 - блок управления.
Устройство управления сигналов содержит модулятор, 1 изменяющий один из параметров незатухающих колебаний, генератор 2, генерирующий незатухающие колебания, коммутатор 3 передачи, соединяющий выход генератора 2 с акустической системой 4, блок 5 управления, изменяющий частоты, длительность и скважность сигнала по заданным исходным данным.
Блок 5 управления содержит переключатели: 5а - установки частоты незатухающих колебаний, 5б - установки частоты модуляции, 5в - длительности и скважности.
Устройство работает следующим образом.
Перед включением устройства переключатели 5 а, б, в устанавливаются в положения в соответствии с исходными данными для излучения имитационного сигнала. Установку исходных данных осуществляет оператор, обслуживающий устройство.
При включении устройства модулятор 1 вырабатывает колебания заданной частоты, которые поступают на вход генератора 2, на выходе которого - амплитудно-модулированные колебания, поступающие на вход коммутатора 3 передачи.
При поступлении сигнала с блока 5 (5в) на излучение коммутатор 3 передачи подключает выход генератора 2 к акустической системе 4, которая и излучает амплитудно-модулированный сигнал в морскую среду.
В качестве генератора 2 может быть использован генератор сигналов Г4-42, который имеет вход для подключения модулятора 1, в качестве которого можно использовать генератор сигналов специальной формы Г629, имеющий выход в диапазоне от 0,001 Гц до 1 МГц.
Длительность излучения и скважность регулируются временным реле 5в. В качестве реле времени может быть использовано генераторное реле (Дружинин Г.В. Реле времени. М.: Энергия, 1966, с. 47-48), которое вырабатывает импульсы с заданной частотой следования. Изменение выдержки времени осуществляется настройкой сумматора, входящего в состав реле.
В качестве акустической системы 4 может быть использован преобразователь типа ПР-2.
Коммутатор 3 передачи является типовым блоком гидролокационной станции.
Управляемыми объектами являются морские животные, поведение которых адекватно по отношению к своим естественным врагам.
Это подтверждается всем ходом эволюции животного мира, создавшей непрерывные трофические связи.
Если поведение морских животных не будет адекватным предложенной модели, существенным признаком в которой является излучение сигналов, имитирующих сигналы, генерируемые хищниками для данного вида, то данный вид должен будет погибнуть.
Предлагается техническое решение задачи, направленной на управление поведением морских животных, использующее безусловные рефлексы этих животных, направленные на выживание вида.
Использование: в области воздействия на поведение морских животных, а именно при защите объектов от медуз. Сущность способа заключается в излучении в морскую среду амплитудно-модулированного сигнала, причем частоты - несущую и модуляционную выбирают с учетом получения адекватного поведения животных. Для реализации этого способа используется устройство, содержащее модулятор, генератор, коммутатор передачи, акустическую систему и блок управления, обеспечивающее имитацию акустического сигнала хищников для данного вида. 2 с.п. ф-лы, 2 ил.
F = 
f = 
где L - характерный размер хищника (жертвы);
v - характерные скорости движения хищника (жертвы);
C - скорость распространения акустической энергии в среде;
χ - отстояние источника излучения от поверхности раздела вода - воздух;
F - модуляционная частота;
f - несущая частота.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кобяков Ю.С | |||
| и др | |||
| Конструирование гидроакустической рыбопоисковой аппаратуры | |||
| Л.: Судостроение, 1986. | |||
