Изобретение относится к области гидроакустики и может использоваться в гидролокационных устройствах обнаружения подводных объектов (подводных лодок, малоразмерных объектов: мин, подводных пловцов), предназначенных для использования в районах с высоким уровнем реверберационных помех, обусловленных мелководьем, сложным рельефом дна, волнением водной поверхности.
Для оценки новизны и технического уровня заявленного технического решения рассмотрим ряд известных заявителю технических средств аналогичного назначения, характеризуемых совокупностью сходных с заявленным изобретением признаков.
Известен способ обнаружения и локации подводной цели на охраняемой морской акватории, суть которого заключается в том, что с помощью сфокусированного лазерного излучения в месте предполагаемого расположения цели в охраняемой морской акватории инициируют ударную звуковую волну или последовательность ударных звуковых волн. Отраженные от подводной цели звуковые волны вместе с инициированными звуковыми волнами принимаются гидроакустическим приемником с остронаправленной характеристикой направленности. Обработка принятых сигналов позволяет произвести обнаружение и сопровождение подводной цели. Для обеспечения скрытности системы обнаружения, что является достигаемым техническим результатом, амплитуду последовательности звуковых импульсов задают ниже или на уровне морских шумов или помех морской акватории, см. патент РФ №2176401.
Известен способ обнаружения подводных объектов на морском рубеже в мелком море, в котором излучают направленные в верхнее полупространство гидроакустические импульсы из ряда точек с известными координатами, расположенных на дне на линии рубежа, принимают отраженные от объектов эхосигналы в этих же точках и о месте положения объекта судят по координатам приемника, обнаружившего эхосигнал, излучают импульсы в соседних точках на разных частотах и во всех точках одновременно, принимают в каждой точке эхосигналы собственной частоты и по меньшей мере двух других частот от соседних по линии излучателей с каждой стороны, расстояние между соседними точками приема-излучения выбирают равным двойной глубине моря по линии рубежа, время прихода эхо-сигналов ограничивают временем прихода отраженных от поверхности моря импульсов на каждой из принимаемых в данной точке частот, а местоположение обнаруженного объекта уточняют по координатам излучателей, работающих на частоте принятых эхосигналов. Следят за уровнем прямых гидроакустических импульсов, принятых от соседнего излучателя, и при изменении этого уровня судят о появлении объекта вблизи дна. Технический результат заключается в обеспечении достоверности и непрерывности контроля, исключении зон неуверенного приема, см. патент РФ №2161319.
Известен способ обнаружения подводных объектов, в основе которого лежит облучение контролируемого пространства набором тонально-модулированных сигналов, несущие и модуляционные частоты которых выбраны в соответствии с предполагаемыми размерами объектов, их положением относительно поверхности водоема и скорости. Принятый сигнал расфильтровывают в соответствии с измеренным, детектируют каждый канал и по ослаблению соответствующих компонент судят о наличии, размерах и параметрах движения объектов. Устройство для обнаружения подводных объектов содержит излучатель, усилитель мощности, задающий генератор, модулятор, блок набора несущих частот, блок набора модуляционных частот, приемную антенну, усилитель, многоканальный частотный фильтр, низкоканальный детектор, индикатор, см. патент РФ №2008692.
Известен способ обнаружения вторжения подводного объекта в контролируемую область натурного водоема, заключающийся в последовательном облучении с помощью гидроакустического излучателя различных зон контролируемой водной акватории и приеме акустического сигнала, провзаимодействующего с подводным объектом гидроакустическим приемником, с последующим определением местоположения, курса и скорости движения объекта по параметрам принятого сигнала, см. патент США N4319349.
Известен способ обнаружения вторжения подводного объекта в контролируемую акваторию натурного водоема, сущность которого заключается в том, что с помощью гидроакустических отражателей, располагаемых по эллиптической поверхности, задают контролируемую область натурного водоема. В фокусах эллиптической поверхности располагают гидроакустические излучатель и приемник. Излучатель выполняют в виде круговой гидроакустической антенны, а приемник, подключенный к индикатору кругового обзора - с равномерной характеристикой направленности. Последовательно по различным направлениям излучатель направляет импульсы акустической энергии, которые за один и тот же промежуток времени достигают приемника, отражаясь от гидроакустических отражателей. На индикаторе кругового обзора формируется серия импульсов. При вторжении подводного объекта в контролируемую зону один из импульсов на индикаторе кругового обзора пропадает, что указывает на наличие цели. Последовательная обработка выходных сигналов позволяет определить курс и скорость движения цели. Технический результат заключается в повышении соотношения сигнал/шум и скрытности проводимого поиска и сопровождения цели, см. патент РФ №2150123.
Основной технической проблемой всех известных гидроакустических способов обнаружения подводных объектов является ограничение воздействия реверберационных помех, т.е. повышение помехоустойчивости обнаружения.
Известны различные способы ограничения воздействия (снижения) реверберационных помех при решение задачи обнаружения объектов. В основном они связаны с энергетическими характеристиками приема отраженных сигналов (см., например, Дж. Урик Основы гидроакустики, Л, Судостроение, 1978 г., с.250-259). При этом ограничение реверберационных помех обеспечивают путем сокращения волнового пакета эхосигнала (пространственного объема одновременного приема отраженных сигналов), что достигается увеличением пространственного разрешения по дальности (вдоль пути распространения сигнала) за счет уменьшения длительности излучаемого сигнала и по фронту сигнала за счет сужения (уменьшения телесного угла) характеристики направленности (ХН) излучающей и приемной антенны.
В ряде случаев эти способы исчерпали свои возможности. Дальнейшее уменьшение длительности сигнала и сужение характеристик направленности излучающих и приемных антенн сокращает не только число мешающих отражателей, одновременно участвующих в формировании отраженного сигнала, но и приводит к сокращению самой отражающей поверхности объекта, одновременно участвующей в отражении, т.е. к уменьшению амплитуды отраженного от объекта сигнала, что недопустимо с точки зрения обеспечения повышения помехоустойчивости приема. Поэтому требуются новые способы ограничения воздействия реверберации, позволяющие увеличить пространственное разрешение при приеме в пределах допустимого минимального пространственного объема волнового пакета эхосигнала.
Из области задач гидроакустики, связанных с изучением и отображением пространственной структуры лоцируемых объектов (например, при картографировании морского дна) известны технические решения, обеспечивающие разделение источников отражения, лежащих в вертикальном продольном (осевом) сечении характеристики направленности приемной антенны. В частности, информацию о пространственном положении отражателей относительно оси ХН в пределах волнового пакета отраженного сигнала позволяет получить принцип интерферометрии акустического луча. Реализация этого принципа подразумевает прием эхосигнала на две идентичные ХН приемных антенн с разнесенными по вертикале фазовыми центрами в плоскости, перпендикулярной направлению приема.
Использование метода интерферометрии в зарубежных гидролокаторах бокового обзора (см., например, Обзор: Развитие гидроакустических систем измерения глубин на основе гидролокаторов бокового обзора, Судостроение за рубежом, №1, 1987, с.76-80) позволило перейти от многолучевого приема узкими диаграммами (вертикального веера) к одному широкому лучу с явными преимуществами в детализации элементов рельефа дна. В этих гидролокаторах пространственное положение отражающих объектов регистрируется по дистанции до них и по углу наклона (вертикальному пеленгу), определяемому по разности фаз отраженного сигнала, принятого на две разнесенные антенны. В гидролокационной системе Atlas GFBS30 ( Bathymetrical Fan Beam Sonar Atlas GFBS30 Technical Proposal, Krupp Atlas Electronic, 1987 г., IX) принцип интерферометрии реализуется в 90-градусной ХН путем создания заранее вычисленных 64 приращений временной задержки в пределах длительности импульса, принимаемого на две разнесенные антенны, что аналогично 64 лучевому эхолоту.
Приведенные технические решения для пеленгования в одной (вертикальной) плоскости, направленные на выявление структуры отражающей поверхности, в частности поверхности дна, могут быть использованы для повышения разрешающей способности по пространству (по азимуту и по углу места) в пределах телесного угла ХН приемной антенны путем двухплоскостного пеленгования отражателей, одновременно находящихся в плоскости фронта принимаемого сигнала.
Наиболее близким к предлагаемому изобретению по физической сущности является способ, реализованный в гидролокаторе фирмы Ferranti (Великобритания) (Jane's Defence Weekly, 1987, 7, 18/IV, №15, 743; The Daily Telegraph, 1987, 24/VIII, №41 082,8.) (Судостроение за рубежом, №12, 1987, с.82) и основанный на излучении в водное пространство импульсного сигнала (посылки), приеме отраженных сигналов на две раздельные гидроакустические антенны, осуществляющие обзор пространства в горизонтальной и в вертикальной плоскостях, определении с высокой разрешающей способностью пеленга (азимута), угла наклона (угла места) и дистанции до цели. Обнаружение производится по соответствию координат отражающего объекта с заранее установленными значениями.
Недостатком данного способа является отсутствие эффективных действий, направленных на ограничение воздействия реверберации.
В основу заявленного изобретения положено решение задачи повышения помехоустойчивости обнаружения подводных объектов за счет ограничения воздействия реверберационных помех путем разделения отметок от мешающих отражателей в плоскости фронта принимаемого сигнала в соответствии с их пространственным положением относительно оси характеристики направленности приемной антенны.
Сущность объекта изобретения - способа выражается в следующей совокупности существенных признаков, достаточной для достижения указанного выше обеспечиваемого изобретением технического результата.
Способ обнаружения подводных объектов, согласно которому подводное контролируемое пространство облучают гидроакустическим сигналом, принимают отраженные от объекта сигналы на раздельные приемные гидроакустические антенны, осуществляющие обзор контролируемого подводного пространства в горизонтальной и в вертикальной плоскостях, характеризуется тем, что определяют в каждый момент времени в течение цикла излучение-прием углы прихода отраженных сигналов в горизонтальной и в вертикальной плоскостях путем определения разности фаз между парами сигналов, принятых соответствующими парами приемных антенн с разнесенными в горизонтальной и в вертикальной плоскостях фазовыми центрами в плоскости фронта отраженного сигнала, определяют для каждого момента приема текущие гистограммы плотности распределения углов прихода сигнала в обеих плоскостях, путем определения времени пребывания наблюдаемого угла приема в каждом интервале углов в секторах характеристик направленности приемных антенн за время длительности излученного сигнала, определяют максимумы плотности гистограмм этих распределений, по которым путем их перемножения определяют текущие реализации значений максимумов двумерной плотности распределения углов прихода отраженных сигналов в плоскости фронта принимаемого сигнала, и по этим реализациям, усредненным за несколько циклов излучение-прием, определяют реализацию текущих порогов обнаружения, и по превышению максимума гистограммы плотности распределения угла прихода принимаемого сигнала над порогом судят об обнаружении подводного объекта.
В предлагаемом способе ограничение воздействия реверберации достигается за счет организации пространственной обработки сигнала.
Физическая сущность предлагаемого способа заключается в определении в момент временного положения распространяющегося фронта волны пространственных углов визирования акустического луча (пеленгов) на каждый отражающий элемент, находящийся в волновом пакете отраженного сигнала (в пространстве между передним и задним фронтами импульса сигнала), и ограниченным телесным углом характеристики направленности приемной антенны.
Из устройства, реализующих гидроакустические способы обнаружения подводных объектов, известна приемоизлучающая когерентная гидроакустическая система, которая предназначена для обнаружения подводных объектов и классификации их в реальном масштабе времени и состоит из низкочастотной широкополосной излучающей системы, выполненной не на пьезокерамических преобразователях, и приемной системы, выполненной на пьезокерамических преобразователях. При излучении акустического поля выполняют амплитудно-фазовые распределения в широко полосе частот по заранее подготовленному закону модуляции излучаемого свипа, при этом уравнения для излучения акустического поля одновременно являются опорными уравнениями в программно-алгоритмическом обеспечении процесса приема и обработки акустических сигналов, см. патент РФ №2204150.
Наиболее близким к предлагаемому устройству по физической сущности является гидроакустическое оборудование, использованное в гидролокаторе фирмы Ferranti (Великобритания) (Jane's Defence Weekly, 1987, 7, 18/IV, №15, 743; The Daily Telegraph, 1987, 24/VIII, №41, 082,8) (Судостроение за рубежом, №12, 1987, с.82).
Сущность объекта изобретения - устройства, предназначенного для реализации вышеописанного способа, выражается в следующей совокупности существенных признаков, достаточной для достижения указанного выше обеспечиваемого изобретением, технического результата.
Устройство для осуществления вышеописанного способа обнаружения подводных объектов, включающее гидроакустическое оборудование, характеризуется тем, что последнее выполнено в виде гидроакустической приемо-излучающей системы, установленной на платформе в море, включающей направленную излучающую антенну и не менее трех идентичных и соосно направленных приемных антенн с разнесенными в плоскости фронта излученного сигнала по вертикали и по горизонтали фазовыми центрами, электрически связанных с выносными усилителями излучаемых и принятых сигналов, также установленными на платформе и соединенными магистральным кабелем связи с пультом управления, установленным на берегу и содержащим блок питания выносных усилителей, блоки фазовых детекторов, управляющую и регистрирующую электронно-вычислительную машину, включающую блок цифровой обработки информации и блок управления, при этом выходы приемных усилителей через магистральный кабель связи соединены со входами фазовых детекторов горизонтального и вертикального пеленгования, выходы которых соединены со входом блока цифровой обработки информации электронно-вычислительной машины, один выход которого соединен со средством для визуализации результатов обработки информации, а другой вывод через блок управления электронно-вычислительной машины соединен со входом усилителя мощности излучаемых сигналов.
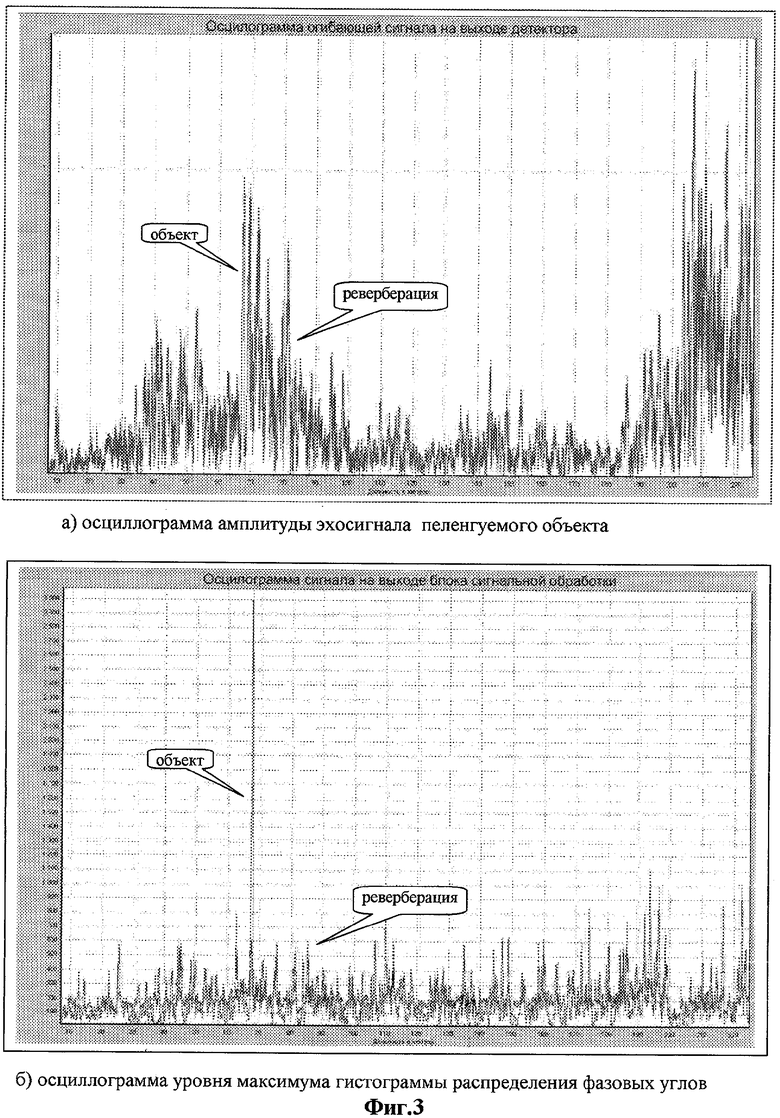
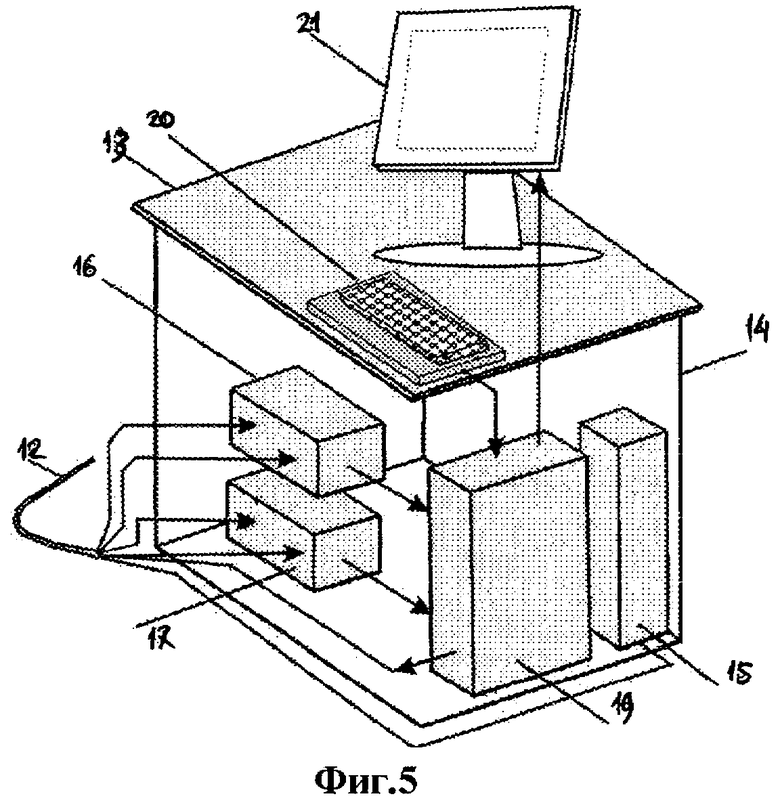
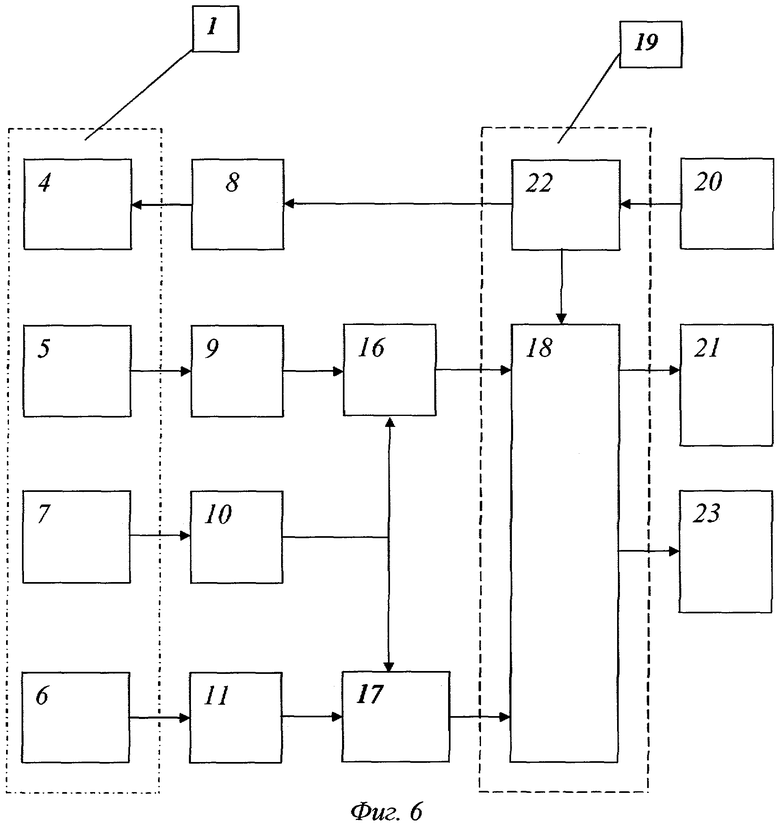
Сущность изобретения поясняется чертежами, где на фиг.1 показан принцип определения пеленгов, где A1, A2, А3 - приемные акустические антенны, фазовые центра которых разнесены на расстояние d в горизонтальной и в вертикальной плоскостях, на фиг.2 - характерный вид пространственного положения отметок (в плоскости угловых координат), соответствующих различному угловому положению отражателей относительно оси диаграммы, на фиг.3 - осциллограммы принимаемых сигналов по всей дистанции зондирования, соответствующие различным способам обнаружения, при этом на фиг.3а приведена зависимость амплитуды отраженного сигнала в случае амплитудно-временной обработки (прием на одну из трех антенн), а на фиг.3б приведена такая же осциллограмма сигнала, соответствующего значению максимума гистограммы углов прихода эхосигналов в растворе приемной характеристики, на фиг.4 представлен общий вид приемопередающей части устройства, реализующего заявленные способы обнаружения подводных объектов, на фиг.5 - общий вид пульта управления, на фиг.6 - блок-схема устройства (блок питания условно не показан).
Устройство для обнаружения подводных объектов состоит из приемоизлучающей гидроакустической системы 1, закрепленной с помощью корпуса 2 на платформе 3, установленной в воде. Антенная система включает одну излучающую направленную антенну 4 и три направленные приемные антенны 5, 6, 7. Компоновка антенн выполнена так, что оси характеристик направленности всех антенн параллельны, а приемные антенны установлены так, что могут обеспечить пространственный прием двумя группами антенн с разнесенными фазовыми центрами в плоскости, перпендикулярной осям характеристик направленности. Пара приемных антенн 6 и 7 формирует приемную группу с разнесенными фазовыми центрами в горизонтальной плоскости, а пара антенн 5 и 7 - в вертикальной, общей антенной в группах является антенна 7. Разнесение фазовых центров в обеих группах одинаково 4λ, что на рабочей частоте сигнала 50 кГц составляет 12 см. Такой же размер имеют апертуры антенн, что обеспечивает их ширину характеристики направленности на уровне 0,7 от осевого максимума 15° в обеих плоскостях.
Внутри корпуса 2 размещены выносные усилители в составе: усилитель излучаемых сигналов 8 и усилители принятых сигналов 9, 10 и 11. Усилители 8, 9, 10 и 11 электрически связаны магистральным кабелем 12 с пультом управления 13, размещенным на берегу. Пульт управления 13 состоит из корпуса 14, внутри которого размещены блок питания выносных усилителей 15, блоки фазовых детекторов 16 и 17, определяющие фазовые углы задержек прихода сигналов от приемных антенн 5 и 6 относительно сигналов, принятых опорной антенной 7, фазовые детекторы реализованы аппаратными средствами, обеспечивающими погрешность измерения фазового угла на уровне типовых фазометров ˜δϕ=10° (В.Б.Пестряков, радиотехнические системы, М., Радио и Связь, 1985 г. с.291), что в пересчете на величину пространственного угла при приеме устройством в секторе характеристики направленности 15° составляет 0,05 град.
На корпусе 14 пульта управления 13 размещена управляющая и регистрирующая электронно-вычислительная машина (ПЭВМ) 19, включающая блок цифровой обработки информации 18 и блок управления 22, монитор 21 и клавиатуру 20. Блок управления 22 связан с выходом блока цифровой обработки информации 18 и обеспечивает управление излучением сигналов, при этом выход блока управления 22 подключен к входу выносного усилителя излучаемых сигналов 8.
Блок цифровой обработки информации 18 связан с выходами фазовых детекторов 16, 17 и выполняет вычислительные функции по приему и обработке информации, поступающей с выходов фазовых детекторов 16 и 17, при этом блок цифровой обработки информации 18 обеспечивает функции визуализации данных обработки на экране монитора 21, установленного вместе с клавиатурой 20, и вывода визуальной графической и числовой информации на машиночитаемый носитель 23.
Устройство взаимодействует с ПЭВМ 19 через стандартный аппаратный интерфейс - вход Ethernet 10/100 Base-TX сетевой карты, которые входят в состав устройства (на чертеже не показаны). Связь устройства с ПЭВМ выполнена любым известным способом.
Регистрирующая и вычислительная функции устройства по получению и обработке информации реализуется в системе ПЭВМ с помощью управляющей программы, запускаемой с клавиатуры 20, при этом в блоке цифровой обработки информации 18 по заданной программе производится построение текущих гистограмм плотности распределения углов прихода отраженных сигналов по горизонтальному и по вертикальному каналам, вычисляются максимумы двумерной плотности распределения углов прихода для каждого момента времени приема отраженного сигнала, полученные временные реализации максимумов за каждый период излучения по заданному числу периодов излучения усредняются и запоминаются как пороговые, с которыми сравниваются вычисленные значения максимумов двумерной плотности распределения отраженных сигналов для каждого момента времени приема, по результатам сравнения судят об обнаружении подводного объекта.
Способ реализуют следующим образом.
Отраженный сигнал на частоте ωo поступает по акустическому лучу под углами (пеленгами) α и β (фиг.1) к осям характеристик направленности приемных антенн в горизонтальной и в вертикальной плоскости. Прием отраженного сигнала с каждого направления пространства производится на группу из трех одинаковых и соосно направленных антенн, из которой формируется две пары (A1, А2 и A1, А3) приемных антенн с разнесенными фазовыми центрами в горизонтальной и в вертикальной плоскостях. При этом одна из антенн (A1) является общей для обеих групп.
Изучение зондирующего сигнала производится отдельной излучающей антенной. Возможно также излучение сигнала с помощью одной из трех приемных антенн. Излучающими сигналами являются импульсы с высокой разрешающей способностью: простые (с тональным заполнением) импульсные сигналы длительностью то, либо сложные широкополосные сигналы с той же эффективной длительностью тэфф=то, получаемой при когерентной обработке (сжатии) принятого сигнала. Длительность сигнала должна быть по возможности минимальной, но не меньше временной протяженности обнаруживаемого объекта то≥2L/C, где L - длина объекта, с - скорость звука в воде. Для обнаружения крупного объекта типа подводная лодка (L=75-150 м) длительность сигнала должна быть около 100-200 мс, а для обнаружения малоразмерных объектов типа подводный пловец то≈1-2 мс.
Частота заполнения сигнала должна находиться в пределах от 2-3 кГц для обнаружения крупных объектов и до 200-300 кГц при обнаружении малоразмерных объектов. При излучении сложных сигналов полоса частотного заполнения должна составлять Δf=1/тo.
Информация о величине горизонтального и вертикального пеленга на отражатели в волновом пакете определяется по фазовым сдвигам между сигналами, принятыми на разнесенные антенны, пропорциональным временной задержке сигнала в антенне A2 относительно A1 и сигнала в антенне А3 относительно A1.
Комплексные амплитуды отраженных сигналов от объекта, находящегося в волновом пакете, принятые разнесенными антеннами, можно представить в виде
где U(t) - единичная импульсная функция, равная единице при t+t3+to≥t≥t+t3 и нулю при других t;
А - амплитуда принятых отраженных сигналов (учитывая условия приема, когда углы α и β не велики, амплитуды сигналов во всех антеннах можно считать примерно одинаковыми);
t3 - время задержки отраженного сигнала (t3=2 r/с), определяемое расстоянием r до объекта;
ωo - средняя частота заполнения сигнала;
Фα=ωоτ'α и Фβ=ωoτ'β - соответствующие фазовые сдвиги (фазовые углы прихода) принимаемых сигналов между парами соседних антенн;
τ'α и τ'β временные запаздывания принимаемых сигналов между парами соседних антенн  .
.
Значения углов прихода отраженного от объекта сигнала в плоскости его фазового фронта можно определить по разности фаз сигналов, принятых парами соседних антенн, используя следующие формулы:

Такой способ приема, основанный на пространственно-фазовой обработке отраженных сигналов, составляет техническую суть первого независимого объекта заявленного изобретения.
Как следует из формул (2), значения углов прихода сигналов от объекта также можно определить по временным запаздываниям сигналов, принятых разнесенными антеннами. Для этого можно использовать двухплоскостные функции взаимокорреляции этих сигналов.
Двухплоскостные функции взаимокорреляции сигналов от соответствующих пар антенн с учетом выражений (1) можно представить в следующем виде:

при  и
и  при других t3;
при других t3;

при  и при других t3; (3)
и при других t3; (3)
Максимальные значения этих функций достигаются в моменты времени
t=t3=то+τα и t=t3=то+τβ.
Фазовые углы (Фα=ωτα и Фβ=ωτβ) в экспонентах функций корреляции можно определить, беря отношения мнимой и действительных частей выражений (3), т.е. в виде:


где Im и Re - обозначение мнимой и действительной частей комплексной функции.
Учитывая малость углов α и β (удаление объекта от антенны на расстояние r≫d) выражения для определения пеленгов на отражающий объект можно получить в следующем виде:

Таким образом, в плоскости ортогональных координат, совпадающей с положением волнового фронта сигнала, в момент времени приема t3=τα+то и t3=τβ+то функции взаимокорреляции отраженного сигнала, принятого на разнесенные антенны, имеют максимум, пропорциональный его энергии, а местоположение отражающего объекта в плоскости углов визирования α и β также определяется группой координат: α, β и r (t3)7
Обобщая приведенные выражения для нескольких источников отражения в пределах лучевой трубки характеристики направленности антенны, реверберационный сигнал можно представить в виде:



где i - номер элементарного отражателя (i=1,2,...N);
N - число элементарных отражателей в волновом (импульсном) пакете эхосигнала;
 - отражательная способность элементарного отражателя с угловой координатой α и β относительно оси характеристики направленности.
- отражательная способность элементарного отражателя с угловой координатой α и β относительно оси характеристики направленности.
В предложении взаимной независимости элементарных отражателей, что характерно для математической модели реверберации, перекрестные члены функции взаимокорреляции пар сигналов (6) обращаются в нуль и функция взаимокорреляции сигналов по парам приемных антенн в вертикальной и в горизонтальной плоскостях имеют следующий вид.


Где  - пространственная функция взаимокорреляции сигнала от элементарного рассеивателя.
- пространственная функция взаимокорреляции сигнала от элементарного рассеивателя.
Каждому рассеивателю соответствует угловой вектор со своими угловыми параметрами αi и βi, определяемыми аналогично выражению (5).
В области параметров задержки τα и τβ, соответствующих приему сигнала, группируется область рассеивателей с параметрами  i и
i и  . Выходной сигнал, соответствующий этой области, будет в виде:
. Выходной сигнал, соответствующий этой области, будет в виде:

где М - число элементарных отражателей, пеленгуемых с углами прихода

Первый член в правой части выражения (8) представляет функция взаимокорреляции сигнала от объекта, наблюдаемого на фоне реверберационных рассеивателей.
Характерный вид пространственного положения отметок (в плоскости угловых координат), соответствующих различному угловому положению отражателей относительно оси диаграммы, приведен, на фиг.2. В квадратном поле индикатора угловых положений отметок отображена сигнальная информация, соответствующая участку фронта волны в пределах сечения диаграммы антенны, удаленному от приемной антенны на расстояние r. По горизонтали поля индикатора отложены углы α, а по вертикали углы β. Середина поля (α=β=0) соответствует осевому направлению характеристики приемных антенн. Как видно из рисунка в верхней части плоскости фронта волны сосредоточены группы отметок, обусловленных сигналами, отраженными от поверхности воды, а в нижней от донных отражателей. Отметка от самого отражающего объекта, находящегося в толще воды на оси характеристики направленности антенны, располагается в центре квадрата.
Оба метода пространственного приема на основе пространственно-фазовой и пространственно-корреляционной обработки отраженных сигналов позволяют различить пространственное положение отражающих объектов в плоскости фронта волны принимаемого сигнала, что дает больше информации для обнаружения объекта и коренным образом отличает такой способ от традиционной амплитудно-временной обработки сигналов. В данном случае при приеме на одну (из трех) антенну и амплитудно-временной обработке сигнала, в момент времени приема t=t3 наблюдалась бы суммарная амплитуда сигналов от всех отражателей, находящихся в пределах волнового пакета отраженного сигнала.
Представление информации о подводных отражателях в плоскости фронта отраженного сигнала, позволяющее разделить в приеме пространственно распределенные отражатели, коренным образом изменяют условия обнаружения объекта. Если при амплитудно-временной обработке обнаружение сигнала цели производится на фоне суммарного сигнала от всех мешающих отражателей, то при корреляционном обнаружении отношение сигнал/помеха характеризуется амплитудой наиболее "сильного" мешающего отражателя.
Для формализации процесса обнаружения в плоскости углов визирования (α, β) строится двумерная гистограмма Wα,β(t3), характеризующая плотность (время пребывания) пеленгов на отражающие объекты, измеренных на момент времени наблюдения t3, усредненных за время длительности импульса то и по падающих в ячейку αi, βj.
Для построения гистограммы величина сектора углов наблюдения α и β выбирается из двух условий. Первое условие дает ограничение снизу. Минимальное значение сектора определяется шириной (как правило на уровне 0,7 от максимума) характеристики направленности приемной антенны в обеих плоскостях, которая зависит от габаритов антенны:

где λ - длина волны акустического сигнала, a D - линейный размер антенны.
Для уменьшения реверберирующего обмена ширина характеристики антенны на рабочей частоте должна быть как можно меньше. В то же время на практике существуют ограничения на физические размеры антенн, обусловленные технико-экономическими требованиями, и обычно D≈(3-5)λ. При D=3λ ширина характеристики приемных антенн (2α0.7 (2β0,7) составляет около 15 град.
Второе условие дает ограничение сверху. Максимальное значение сектора определяется величиной, в пределах которой могут быть получены однозначные (в пределах одного полного цикла измерений фазового угла, равного 2 тт) значения пеленгуемых углов α и β.

Учитывая, что сектор приема не должен превышать сектор однозначного пеленгования, из равенства выражений (9) и (10) следует необходимое требование к выбору величины разнесения фазовых центров приемных антенн:

При построении двумерной гистограммы плоскость углов приема α и β, т.е. выбранные выше сектора ±αmax=±α0.7 и ±βmax=±β0,7 разбиваются на nα и nβ ячеек, ширина которых определяется погрешностями измерения углов прихода сигнала

где δ'α и δβ - погрешности измерения углов прихода сигнала фазовым методом пеленгования.
Величины погрешностей (δ'α и δβ) зависят от разнесения приемных антенн (В.Б.Пестряков Радиотехнические системы, М., Радио и Связь. 1985 г. с.291) и определяются по формуле

Принимая во внимание требования к величине максимального разнесения приемных антенн (11) и учитывая выражения (9) и (13), число ячеек для построения гистограммы углов сигналов должно составлять 50×50.
Для каждого момента времени t3 цикла излучение-прием отдельно строятся гистограммы углов прихода по пеленгу и по углу места, выбираются в них максимальные значения

Полученные реализации Wmax(t3) запоминаются и усредняются за несколько циклов и используются для формирования текущего порога обнаружения Wп(t)=<Wmax(t3)>. Число циклов усреднения в зависимости от периода волнения водной поверхности может изменяться от 10-12 до 80-100.
При появлении в характеристике приемной антенны отражающего объекта по превышению максимума гистограммы над порогом Wmax(t3)>Wп(t) принимается решение о его обнаружении.
Действие способа проверялось экспериментально в натурных условиях для обнаружения подводных пловцов в сложных помеховых условиях акватории, обусловленных мелководьем с глубинами от 2 до 7 м, волнением с высотой волны до 0,5 м, а также сложными рельефами и структурой дна.
В воду излучались простые тональные сигналы с частотой 50 кГц с длительностью 1 мс. Отраженные сигналы из воды принимались на три одинаковые приемные антенны с шириной характеристики направленности каждой в обеих плоскостях около 15 град. Как видно осциллограммы на фиг.3а в момент отражения от объекта выделить прирост амплитуды сигнала над реверберационной помехой практически не возможно.
На фиг.3б видно, что сигнал, формируемый объектом, в несколько раз превышает текущий уровень реверберационной помехи. Амплитуда помехового сигнала в каждый момент времени осциллограмы определялась сигналом наиболее "сильного" отражателя.
Результаты экспериментальной проверки данного способа приема эхосигналов на основе пространственно-фазовой обработки показали, что при преобладающей помехе, обусловленной поверхностной реверберацией, выигрыш в обработке сигнала за счет ограничения реверберации по сравнению с традиционной амплитудно-временной обработкой с приемом на одну антенну на 10-12 дБ выше.
Устройство работает следующим образом.
С клавиатуры 20 ПЭВМ 19 запускается управляющая работой устройства программа. При этом в блоке управления 22 ПВЭМ 19 пор заданной программе формируются излучаемые сигналы с заданными длительностью (1 мс), видом и частотой заполнения (тон, 50 кГц), периодом излучения (0,5 с), которые через магистральный кабель связи 12 передаются на выносной усилитель излучаемых сигналов 8. Сигналы усиливаются и через излучающую антенну 4 излучаются в воду.
Отраженные сигналы принимаются из воды приемными антеннами 5, 6 и 7, усиливаются выносными усилителями принятых сигналов 9, 10, 11, передаются по магистральному кабелю связи 12 на входы фазовых детекторов горизонтального и вертикального пеленгования отражателей 16, 17, в которых в каждый момент времени определяются реализации текущих углов прихода отраженных сигналов. Временные реализации текущих углов прихода отраженных сигналов с выходом фазовых детекторов 16, 17 поступают на вход блока цифровой обработки информации 18, в котором по заданной программе производится построение текущих гистограмм плотности распределения углов прихода отраженных сигналов по горизонтальному и по вертикальному каналам, вычисляются максимумы двумерной плотности распределения углов прихода для каждого момента времени приема отраженного сигнала. Полученные временные реализации максимумов за каждый период излучения по заданному числу периодов излучения усредняются и запоминаются как пороговые, с которыми сравниваются вычисленные значения максимумов двумерной плотности распределения отраженных сигналов для каждого момента приема, по результатам сравнения судят об обнаружении подводного объекта. При этом блок цифровой обработки информации 18 обеспечивает функции визуализации данных обработки на экране монитора 21 и вывода визуальной графической и числовой информации на машиночитаемый носитель 23.
Экспериментальное доказательство достижения поставленной изобретением цели на примере конкретной реализации способа в устройстве обнаружения подводных объектов представлено в виде осциллограмм на фиг.3а и 3б. Осциллограмма реализации сигнала на фиг.3а, соответствующая изменению текущей величины максимума двумерной плотности распределения углов прихода отраженных сигналов в приемные антенны устройства, наглядно иллюстрирует результат снижения реверберационной помехи по сравнению с обычным приемом сигнала при тех же условиях на одну величину и его амплитудно-временной обработкой (см. осциллограмму амплитуды того же сигала, принятого на одну из трех антенн устройства, на фиг.3б).
Таким образом, способ обнаружения подводных объектов, основанный на пространственно-фазовой обработке сигналов, разделяющей в плоскости фронта сигнала воздействие реверберационной помехи и отражающего объекта, и устройство его реализующее, существенно (в три-четыре раза) уменьшает воздействие реверберации, повышая эффективность обнаружения пеленгуемых подводных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ЧЕЛОВЕКА В ЗОНЕ ОХРАНЫ | 2005 |
|
RU2291493C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645016C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2366973C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2021 |
|
RU2772110C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2365938C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ТАКОЙ СИСТЕМЫ | 2023 |
|
RU2812004C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |


Изобретение относится к области гидроакустики и может использоваться в гидролокационных устройствах обнаружения подводных объектов (подводных лодок, малоразмерных объектов: мин, подводных пловцов). Достигаемым техническим результатом является ограничение воздействия реверберации за счет организации пространственной обработки сигнала. Физическая сущность изобретения заключается в определении в момент временного положения распространяющегося фронта волны пространственных углов визирования акустического луча (пеленгов) на каждый отражающий элемент, находящийся в волновом пакете отраженного сигнала (в пространстве между передним и задним фронтами импульса сигнала), и ограниченным телесным углом характеристики направленности приемной антенны. Пространственный прием на основе пространственно-фазовой и пространственно-корреляционной обработки отраженных сигналов позволяет различить пространственное положения отражающих объектов в плоскости фронта волны принимаемого сигнала, что дает больше информации для обнаружения объекта и коренным образом отличает такой способ от традиционной амплитудно-временной обработки сигналов. 2 н.п. ф-лы, 6 ил.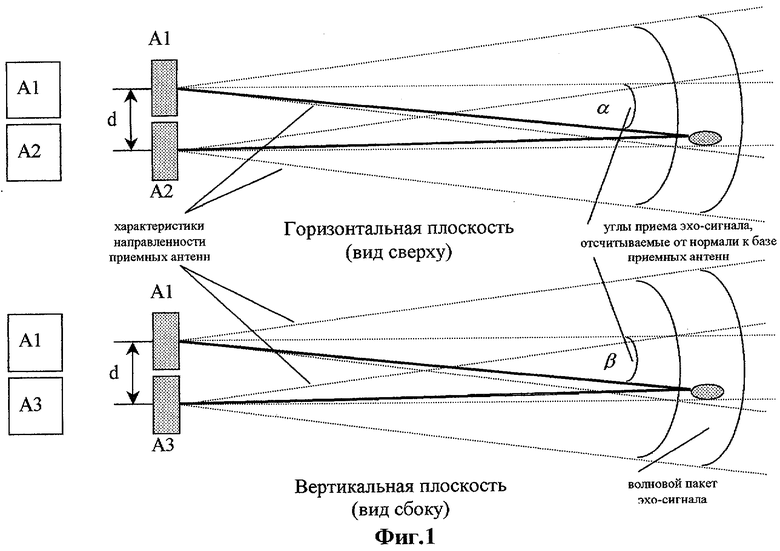
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2008692C1 |
| ПРИЕМНИК СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 2002 |
|
RU2234815C1 |
| US 3946355 A, 23.03.1976 | |||
| US 4319349 A, 09.03.1982. | |||

