Изобретение относится к сейсмометрии, в частности к способам регистрации сейсмических сигналов многоканальной цифровой сейсмометрической аппаратурой.
Известен способ регистрации сейсмических сигналов многоканальной цифровой сейсмометрической аппаратурой, включающий преобразование механических колебаний почвы в электрические сигналы, их усиление и фильтрацию, аналого-цифровое преобразование, запись информации на магнитную ленту и обработку зарегистрированной информации на ЭВМ [1] . К недостаткам данного способа следует отнести нерациональное использование накопителя информации (магнитофона). Другим недостатком является низкая надежность устройств, реализующих данный способ, обусловленная наличием движущихся частей, чувствительностью к вибрациям и внешним магнитным полям.
Наиболее близким по технической сущности к заявляемому объекту является способ регистрации сейсмических сигналов многоканальной цифровой сейсмометрической аппаратурой, включающий расположение в заданных пунктах многокомпонентных сейсмографов, связанных с центральным пунктом управления, настройку сейсмографов на разные пороги срабатывания, непрерывный прием сейсмических сигналов каждым сейсмографом и сравнение модуля сигналов с соответствующими порогами, при превышении модулем сигнала порога на любом из сейсмографов - регистрацию сигнала на носитель информации и анализ истинности сейсмического события. Пороги срабатывания сейсмографов устанавливают с диапазоном изменения уровней в 2-5 раз в зависимости от места расположения сейсмографов на грунте. Сейсмическое событие считают истинным, если на центральный пункт управления поступают сигналы о превышении порогов срабатывания по крайней мере с двух сейсмографов. При этом с центрального пункта управления подают сигнал о включении регистрации сигналов на носители информации на всех сейсмографах [2] .
Недостатком данного способа является значительная вероятность потери полезной информации, недостаточная достоверность зарегистрированной информации из-за неоптимального использования носителей информации сейсмографов.
Цель изобретения - создание такого способа, в котором операции, проводимые над элементами сейсмометрической аппаратуры, в частности над носителями информации сейсмографов, последовательность операций и условия их проведения позволили бы уменьшить вероятность потери информации, повысить достоверность зарегистрированной информации путем оптимизации использования носителей информации сейсмографов.
Цель достигается тем, что в известном способе регистрации сейсмических сигналов многоканальной цифровой сейсмометрической аппаратурой, включающем расположение в заданных пунктах многокомпонентных сейсмографов, связанных с центральным пунктом управления, настройку сейсмографов на разные пороги срабатывания, непрерывный прием сейсмических сигналов каждым сейсмографом и сравнение модуля сигналов с соответствующими; порогами, при превышении модулем сигнала порога на любом из сейсмографов - регистрацию сигнала на носитель информации и анализ истинности сейсмического события, согласно изобретению, предварительно каждый сейсмограф выполняют на основе микропроцессорной структуры, его носители информации-в виде предварительного оперативного запоминающего устройства (ПОЗУ) и оперативного запоминающего устройства (ОЗУ), а центральный пункт управления - в виде управляющего компьютера, задают с управляющего компьютера для каждого сейсмографа нижнюю fн, верхнюю fв частоты регистрируемых сейсмических сигналов, а также частоту дискретизации fд, которую выбирают из соотношения:
fд = k1fв, где k1 = 2-4, непосредственно после того, как выполняют прием и аналого-цифровое преобразование сейсмических сигналов, производят их запись в область ПОЗУ таким образом, что в ней сохраняется информация о сигналах за последний промежуток времени величиной:
Δ t = k2/fн, где k2 = (1-1,5), причем объем области выбирают из соотношения:
V = nk1k2 (fв / fн)υ где n - число регистрируемых компонент сейсмических сигналов; υ - число байт, отводимых для записи одной дискреты компоненты сигнала, при превышении модулем сигнала порога на любом из сейсмографов, содержимое из ПОЗУ переносят в ОЗУ и продолжают регистрировать сигналы в последнем, после чего при принятии отрицательного решения об истинности сейсмического события очищают область ОЗУ, в которой записана информация о данном событии, а в дальнейшем информацию из ОЗУ всех сейсмографов передают в управляющий компьютер. При принятии положительного решения об истинности сейсмического события сейсмические сигналы могут регистрировать в ОЗУ до тех пор, пока модуль экстремума сигнала не упадет ниже порога. В дальнейшем информацию из ОЗУ всех сейсмографов передают в управляющий компьютер. Зарегистрированную в ОЗУ сейсмографа информацию могут передавать в управляющий компьютер по заполнению ОЗУ.
Предварительное выполнение каждого сейсмографа на основе микропроцессорной структуры позволяет уменьшить вероятность потери полезной информации, повысить достоверность зарегистрированной информации за счет создания гибкой структуры сейсмографа. Такая структура позволяет реализовывать оптимальное распределение носителей информации, рациональные критерии истинности сейсмического события в соответствии с поставленной задачей.
Выполнение носителей информации в виде ПОЗУ и ОЗУ позволяет уменьшить вероятность потери полезной информации за счет повышения надежности носителей информации (исключения движущихся частей, уменьшения чувствительности к вибрациям и внешним магнитным полям) и уменьшения времени обращения к носителям информации. Разделение носителей информации на ПОЗУ и ОЗУ позволяет сократить время наиболее часто повторяющейся операции - обращения к ПОЗУ.
Выполнение центрального пункта управления в виде управляющего компьютера позволяет упростить процессы задания режимов работы сейсмографов, а также последующего сбора и обработки сейсмических сигналов, зарегистрированных сейсмографами.
Предварительное задание с управляющего компьютера для каждого сейсмографа нижней fн, верхней fв частот регистрируемых сейсмических сигналов, а также частоты дискретизации fд позволяет с учетом требований к частотному диапазону регистрируемых сейсмических сигналов исключить из спектрального состава зарегистрированных сигналов гармоники, которые не несут полезной информации. Таким образом достигается оптимальное использование носителей информации (ПОЗУ и ОЗУ). Требования к частотному диапазону регистрируемых сейсмических сигналов предварительно определяются исходя из геофизических особенностей поставленной задачи.
Выбор частоты дискретизации из соотношения:
fд = k1fв, где k1 = 2-4, позволяет зарегистрировать сейсмические сигналы в цифровом виде с дискретностью, достаточной для последующего восстановления всех гармоник сигналов в заданном частотном диапазоне без заполнения ПОЗУ и ОЗУ избыточной информацией. Выбор коэффициента k1 < 2 нецелесообразен, поскольку согласно теореме Котельникова при этом по зарегистрированной в цифровом виде информации невозможно восстановление наиболее высокочастотной гармоники сигнала из заданного частотного диапазона. Выбор коэффициента k1 > 4 нецелесообразен, поскольку при этом происходит заполнение ПОЗУ и ОЗУ избыточной информацией.
Запись сигнала в область ПОЗУ непосредственно после того, как выполняют прием и аналого-цифровое преобразование сейсмических сигналов таким образом, что в данной области сохраняется информация о сигналах за последний промежуток времени величиной:
Δt= k2/fн, где k2 = (1-1,5), позволяет при необходимости перенести в ОЗУ информацию о сигналах в течение предыстории сейсмического события. Выбор коэффициента k2 < 1 нецелесообразен, поскольку при этом в ПОЗУ сохраняется информация менее чем об одном периоде наиболее низкочастотной гармоники сигнала из заданного частотного диапазона, что недостаточно для последующего анализа сейсмического события. Выбор коэффициента k2 > 1,5 нецелесообразен, поскольку при этом происходит заполнение ПОЗУ избыточной информацией.
Выбор объема области ПОЗУ, в которую производят запись сейсмических сигналов из соотношения:
V = nk1k2 (fв/fн)υ, где n - число регистрируемых компонент сейсмических сигналов; υ - число байт, отводимых для записи одной дискреты компоненты сигнала, позволяет оптимизировать использование носителей информации (ПОЗУ и ОЗУ). Действительно, объем памяти, необходимый для записи n компонент сигнала с частотой дискретизации fд = k1fв в течение времениΔ t = k2/fн, равен:
V= nΔtfдυ= nk1k2(fв/fн)υ При этом в ПОЗУ, как показано выше, в цифровом виде сохраняется информация о предыстории сейсмического события с дискретностью, достаточной для последующего восстановления всех гармоник сигналов в заданном частотном диапазоне без заполнения ПОЗУ избыточной информацией. При превышении модулем сигнала порога и принятии положительного решения об истинности сейсмического события историю сейсмического события регистрируют в ОЗУ с дискретностью, достаточной для последующего восстановления всех гармоник сигналов в заданном частотном диапазоне без заполнения ОЗУ избыточной информацией. Таким образом, ОЗУ заполняется только полезной информацией как о предысториях, так и об историях сейсмических событий, что повышает достоверность зарегистрированной информации. Отсутствие в ОЗУ избыточной информации позволяет при прочих равных условиях зарегистрировать в ОЗУ большее количество сейсмических событий и, следовательно, уменьшает вероятность потери полезной информации.
Перенос содержимого из ПОЗУ в ОЗУ и продолжение регистрации сигналов в последнем при превышении модулем сигнала порога на любом из сейсмографов позволяет зарегистрировать в ОЗУ соответствующего сейсмографа информацию как об истории, так и о предыстории сейсмического события, имеющего большую длительность, которая не позволяет записать его в ПОЗУ, а также сохранить полезную информацию для последующей обработки при принятии положительного решения об истинности сейсмического события.
Очистка области ОЗУ, в которой записана информация о сейсмическом событии при принятии отрицательного решения об истинности сейсмического события, и регистрация сейсмических сигналов в ОЗУ до тех пор, пока модуль экстремума сигнала не упадет ниже порога, позволяет исключить накопление в ОЗУ избыточной информации.
Последующая передача в управляющий компьютер информации из ОЗУ всех сейсмографов упрощает процессы сбора и обработки информации.
Передача в управляющий компьютер зарегистрированной в ОЗУ сейсмографа информации по заполнению ОЗУ уменьшает вероятность потери полезной информации за счет исключения возможности переполнения ОЗУ.
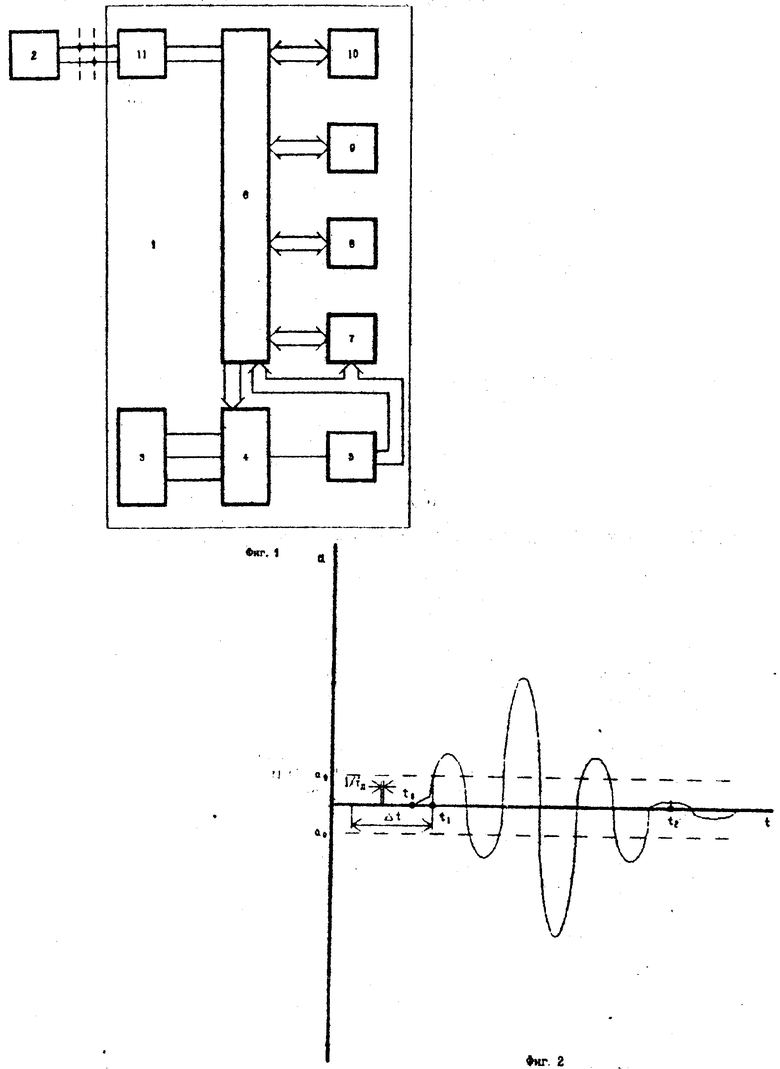
Способ регистрации сейсмических сигналов многоканальной цифровой сейсмометрической аппаратурой реализуется при помощи устройства, представленного на фиг. 1. На фиг. 1 представлены многокомпонентный сейсмограф 1, выполненный на основе микропроцессорной структуры, и центральный пункт управления, выполненный в виде управляющего компьютера 2. Сейсмометры 3 соединены с входами мультиплексора 4, выход которого соединен с входом аналого-цифрового преобразователя (АЦП) 5. Выход АЦП 5 связан магистралью обмена информацией с микропроцессором 6 и ПОЗУ 7. Носители информации сейсмографа 1 выполнены в виде ПОЗУ 7 и ОЗУ 8. Микропроцессор 6 соединен магистралями обмена информацией с мультиплексором 4, ПОЗУ 7, ОЗУ 8, постоянным запоминающим устройством (ПЗУ) 9 и таймером 10. Микропроцессор 6 через устройство связи с объектом (УСО) 11 соединен с управляющим компьютером.
На фиг. 2 представлена зависимость одной компоненты сейсмического сигнала от времени при сейсмическом событии.
Способ осуществляется следующим образом. Предварительно каждый многокомпонентный сейсмограф 1 выполняют на основе микропроцессорной структуры, его носители информации - в виде ПОЗУ 7 и ОЗУ 8, а центральный пункт управления - в виде управляющего компьютера 2. Располагают в заданных пунктах сейсмографы, связанные с центральным пунктом 2 управления. С управляющего компьютера 2 через УСО 11 для каждого сейсмографа 1 задают в ПЗУ нижнюю fн, верхнюю fв частоты регистрируемых сейсмических сигналов, а также частоту дискретизации fд, которую выбирают из соотношения:
fд = k1fв, где k1 = 2-4, а также пороги срабатывания по всем компонентам сигнала. Кроме того, с управляющего компьютера 2 для таймера 10 каждого сейсмографа 1 устанавливают текущие дату и время. С помощью сейсмометров 3 ведут непрерывный прием сейсмических сигналов. С помощью цепочки мультиплексор 4, управляемый микропроцессором 6, АЦП 5 осуществляют аналого-цифровое преобразование сейсмических сигналов и с помощью микропроцессора 6 - сравнение модуля сигналов с соответствующими порогами. Непосредственно после этого производят их запись в область ПОЗУ 7 таким образом, что в ней сохраняется информация о сигналах за последний промежуток времени величиной
Δ t = k2/fн, где k2 = (1-1,5), причем объем области выбирают из соотношения:
V= nk1k2(fв/fн)υ, где n - число регистрируемых компонент сейсмических сигналов; υ - число байт, отводимых для записи одной дискреты компоненты сигнала. После начала сейсмического события (момент времени tо на фиг. 2) при превышении модулем сигнала а порога ао на любом из сейсмографов 1 (момент времени t1) содержимое из ПОЗУ 7 переносят в ОЗУ 8 и продолжают регистрировать сигналы в последнем. После этого при принятии отрицательного решения об истинности сейсмического события очищают область ОЗУ 8, в которой записана информация о данном событии. В случае принятия положительного решения об истинности сейсмического события сейсмические сигналы регистрируют в ОЗУ 8 до тех пор, пока модуль экстремума сигнала а не упадет ниже порога ао (момент времени t2). В дальнейшем информацию из ОЗУ 8 всех сейсмографов 1 передают в управляющий компьютер 2. Информацию могут передавать в управляющий компьютер 2 по заполнению ОЗУ 9.
Устройство для осуществления заявляемого способа может быть выполнено следующим образом. Трехкомпонентный сейсмограф 1 выполнен на основе микропроцессорной структуры, включающей микропроцессор 6 Intel 8031. Центральный пункт управления выполнен в виде управляющего IBM - совместимого компьютера 2 типа "Lop-top" с последовательным интерфейсом RS 232. Сейсмометры 3 выполнены в виде трехкомпонентных пьезоэлектрических акселерометров А1632 и соединены через мультиплексор 4 КР590КН6 с входом АЦП 5 КР572ПВ1. Выход АЦП 5 связан магистралью обмена информацией с микропроцессором 6 и ПОЗУ 7. Носители информации сейсмографа 1 выполнены в виде ПОЗУ 7 (2 корпуса TS6165 суммарной емкостью V1 = 2˙ 8 = 16 кбайт) и ОЗУ 8 (16 корпусов TS6165 суммарной емкостью V2 = = 16 ˙ 8 = 128 кбайт). Микропроцессор 6 соединен магистралями обмена информацией с мультиплексором 4, ПОЗУ 7, ОЗУ 8, постоянным запоминающим устройством (ПЗУ) 9 (КР573РФ4) и таймером 10. Таймер 10 собран на основе двух счетчиков КР561ИЕ11. Микропроцессор 6 через устройство связи с объектом (УСО) 11 соединен с управляющим компьютером 2. УСО 11 выполнено на основе транзисторных ключей.
Способ осуществляется следующим образом. Предварительно каждый многокомпонентный сейсмограф 1 выполняют на основе микропроцессорной структуры, его носители информации - в виде ПОЗУ 7 и ОЗУ 8, а центральный пункт управления - в виде управляющего компьютера 2. Располагают в заданных пунктах сейсмографы, связанные с центральным пунктом 2 управления. С управляющего компьютера 2 через УСО 11, исходя из геофизической особенности поставленной задачи, для каждого сейсмографа 1 задают в ПЗУ нижнюю fн = = 0,1 Гц, верхнюю fв = 50 Гц частоты регистрируемых сейсмических сигналов, частоту дискретизации fд, которую выбирают из соотношения:
fд = k1fв = 4 ˙ 50 = 200 Гц, где k1 = 4, а также пороги срабатывания по всем компонентам сигнала. Выбор коэффициента k1 < 2 нецелесообразен, поскольку согласно теореме Котельникова при этом по зарегистрированной в цифровом виде информации невозможно восстановление наиболее высокочастотной гармоники сигнала из заданного частотного диапазона. Выбор коэффициента k1 > 4 нецелесообразен, поскольку при этом происходит заполнение ПОЗУ 7 и ОЗУ 8 избыточной информацией. Кроме того, с управляющего компьютера 2 для таймера 10 каждого сейсмографа 1 устанавливают текущие дату и время. С помощью сейсмометров 3 ведут непрерывный прием сейсмических сигналов. С помощью цепочки мультиплексор 4, управляемый микропроцессором 6, АЦП 5 осуществляют аналого-цифровое преобразование сейсмических сигналов и с помощью микропроцессора 6 - сравнение модуля сигналов с соответствующими порогами. Непосредственно после этого производят их запись в область ПОЗУ 7 таким образом, что в ней сохраняется информация о сигналах за последний промежуток времени величиной
Δ t = k2/fн = 1/0,1 = 10 с, где k2 = 1, причем объем области выбирают из соотношения:
V = nk1k2(fв/fн)υ = 3 ˙ 4 (50/0,1) ˙ 2 = 12˙ 103 байт = 12 кбайт, где n = 3 число регистрируемых компонент сейсмических сигналов; υ = = 2 - число байт, отводимых для записи одной дискреты компоненты сигнала. V < V1 < <V2, то есть объемы ПОЗУ 7 и ОЗУ 8 выбраны достаточными для размещения требуемого объема информации. Выбор коэффициента k2 < 1 нецелесообразен, поскольку при этом в ПОЗУ 7 сохраняется информация менее чем об одном периоде наиболее низкочастотной гармоники сигнала из заданного частотного диапазона, что недостаточно для последующего анализа сейсмического события. Выбор коэффициента k2 > 1,5 нецелесообразен, поскольку при этом происходит заполнение ПОЗУ 7 избыточной информацией. После начала сейсмического события (момент времени tо на фиг. 2) при превышении модулем сигнала а порога ао на любом из сейсмографов 1 (момент времени t1) содержимое из ПОЗУ 7 переносят в ОЗУ 8 и продолжают регистрировать сигналы в последнем. После этого при принятии отрицательного решения об истинности сейсмического события очищают область ОЗУ 8, в которой записана информация о данном событии. В случае принятия положительного решения об истинности сейсмического события сейсмические сигналы регистрируют в ОЗУ 8 до тех пор, пока модуль экстремума сигнала а не упадет ниже порога ао (момент времени t2). В дальнейшем информацию из ОЗУ 8 всех сейсмографов 1 передают в управляющий компьютер 2 по заполнению ОЗУ 8.
По сравнению с прототипом заявляемый способ регистрации сейсмических сигналов многоканальной цифровой сейсмометрической аппаратурой позволяет уменьшить вероятность потери информации, повысить достоверность зарегистрированной информации путем оптимизации использования носителей информации. (56) 1. Авторское свидетельство СССР N 1434382, кл. G 01 V 1/24, 1988.
2. Авторское свидетельство СССР N 1442956, кл. G 01 V 1/24, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОЙ ЦИФРОВОЙ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 1992 |
|
RU2008701C1 |
| Способ многоканальной регистрации сейсмических колебаний на инженерно-сейсмометрической станции | 2017 |
|
RU2654831C1 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| Цифровая инженерно-сейсмометрическая станция с системой мониторинга технического состояния зданий или сооружений | 2017 |
|
RU2654830C1 |
| ПОДВОДНАЯ ГЕОФИЗИЧЕСКАЯ СТАНЦИЯ | 2010 |
|
RU2435180C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| СПОСОБ СЕЙСМИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ ПОИСКА И РАЗВЕДКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2010 |
|
RU2432588C1 |
| СПОСОБ СЕЙСМИЧЕСКОГО МИКРОРАЙОНИРОВАНИЯ | 2010 |
|
RU2436125C1 |
Использование: в сейсмометрии. Сущность изобретения: предварительно каждый сейсмограф выполняют на основе микропроцессорной структуры, его носители информации - в виде предварительного оперативного запоминающего устройства (ПОЗУ) и оперативного запоминающего устройства (ОЗУ), а центральный пункт управления - в виде управлящего компьютера. Задают с управлящего компьютера для каждого сейсмографа нижнюю fн, верхнюю fв частоты регистрируемых сейсмических сигналов, а также частоту дискретизации fд. Последнюю выбирают из соотношения: fд=k1fв, где k1=2-4. Непосредственно после того, как выполняют прием и аналого-цифровое преобразование сейсмических сигналов, производят их запись в область ПОЗУ таким образом, что в ней сохраняется информация о сигналах за последний промежуток времени величиной Δt=k2/fн, где k2=1-1.5. При превышении модулем сигнала порога на любом из сейсмографов содержимое из ПОЗУ переносят в ОЗУ и продолжают регистрировать сигналы в последнем до тех пор, пока модуль экстремума сигнала не упадет ниже порога. В дальнейшем информацию из ОЗУ всех сейсмографов передают в управляющий компьютер. 1 з. п. ф-лы, 2 ил.
