Изобретение относится к области сейсмических исследований и может быть применено при поиске залежей углеводородов на континентальном шельфе.
Известные способы сейсморазведки обычно используют регистрацию прохождения сейсмических колебаний частотой более 10,0 Гц. За время использования в сейсмической разведке подобных частот достаточно широко разработано аппаратурное оформление для генерирования и регистрации подобных колебаний, а также математический аппарат для обработки данных. Для генерирования подобных колебаний преимущественно используют либо вибраторы, либо взрывы. Для проведения взрывных работ необходимо проводить бурение шпуров для закладывания взрывчатых веществ. Подобная техника резко отрицательно влияет на состояние экологии в зоне поиска. Кроме того, коэффициент успешности предсказания с использованием известных методов и приемов сейсмической разведки не превышает величины 0,5. Следовательно, по меньшей мере, каждая вторая скважина, пробуренная по заключениям традиционной сейсмической разведки нефтегазовых залежей, оказывается ошибочно заложенной. Кроме средств, потраченных напрасно на бурение скважины, при этом наносится непоправимый и необоснованный ущерб окружающей среде, особенно при выполнении аналогичных работ на шельфе морей.
Известен способ вибросейсморазведки при поиске залежи углеводородов [1], в котором возбуждают сейсмические колебания вибратором, регистрируют трехкомпонентными сейсмическими приемниками сейсмический сигнал и проводят его математическую обработку, причем сейсмические колебания возбуждают в диапазоне частот 2-5 Гц в течение не менее 3 минут, регистрацию сейсмического сигнала осуществляют в течение не менее 20 минут до возбуждения сейсмических колебаний и не более чем в течение 5 минут после окончания генерирования сейсмических колебаний, в качестве сейсмического сигнала используют сейсмический фон Земли, а о наличии залежи судят по увеличению площади под кривой взаимного спектра одноименных компонент при записи сейсмического фона после возбуждения сейсмических колебаний по сравнению с записью сигнала до генерирования колебаний.
Недостатком известного способа является низкая информативность, не позволяющая определить глубину залежи, а также сложность математического анализа полученных сигналов из-за невозможности выделения записанных помех.
Известен также способ поиска залежи углеводородов [2], в котором проводят генерирование сейсмических колебаний сейсмовибратором в диапазоне от 2 до 5 Гц, регистрируют информационный сигнал с использованием трехкомпонентных приемников сейсмических колебаний, способных регистрировать информационный сигнал в инфразвуковом диапазоне и расположенных на расстоянии не более 500 м друг от друга и не далее чем 500 м от сейсмовибратора, в диапазоне частот от 2 до 5 Гц одновременно по трем компонентам как до, так и во время генерирования сейсмического сигнала, а о наличии залежи углеводородов судят по появлению спектральной аномалии информационного сигнала не менее чем на одной из компонент при записи информационного сигнала во время генерирования сейсмических колебаний по сравнению с информационным сигналом, измеренным до генерирования.
Недостатком известного способа является низкая информативность, не позволяющая определить глубину залежи, а также сложность математического анализа полученных сигналов из-за невозможности выделения записанных помех.
Известен способ сейсморазведки [3], включающий формирование в зонах излучения и приема сейсмических сигналов, регистрацию информационного сигнала с последующей математической обработкой полученных данных, причем сигнал регистрируют не менее чем двумя трехкомпонентными сейсмическими установками, размещенными на некотором расстоянии друг от друга.
Для осуществления этого способа необходимо использовать сейсмические излучатели и проводить предварительное изучение геологического разреза в районе поиска. Кроме того, способ отягощен вычислительными операциями.
Также известен способ сейсморазведки при поиске нефтегазовых месторождений
[4], основанный на определении длины волны L преобладающего сейсмического фона на бесперспективном участке, при которой корреляционная связь между одноименными компонентами ослабляется более чем в два раза. На исследуемом участке располагают на расстоянии L/4 не менее двух трехкомпонентных установок. Регистрируют по всем компонентам естественный сейсмический фон на частотах 1-20 Гц. О наличии месторождения судят по сдвигу в сторону низких частот максимума частотного спектра сейсмического сигнала, зарегистрированного на исследуемой площади.
Однако этот способ является трудоемким из-за необходимости выполнять сейсмические исследования над бесперспективным месторождением, что требует проведения предварительных работ по выявлению такого участка, а затем выполнять сейсмические исследования над перспективным месторождением, который может быть выявлен путем сравнения зарегистрированных сигналов над обоими участками. При этом получение объективных оценок результатов исследований возможно только при синхронной регистрации сигналов над обоими участками.
Известен также способ сейсморазведки при поиске подземных вод [5]. Указанный способ заключается в размещении, по крайней мере, трех электрических зондов в Земле в раздельных положениях по прямой линии, пропускании через исследуемый участок Земли между первым и вторым зондом электрического тока и измерении разности потенциалов между первым и третьим зондом, а также между третьим и вторым зондом. Указанные разности потенциалов сравнивают между собой и на основании такого сравнения определяют присутствие подземной воды.
Данный способ также является трудоемким из-за необходимости выполнения буровых работ, необходимых для оборудования шахт для размещения электрических зондов, и позволяет достичь требуемой степени достоверности определения участка с перспективным месторождением при условии оборудования существенного количества шахт для размещения электрических зондов.
Известен также способ поиска углеводородов (варианты) и способ определения глубины залегания продуктивных пластов [6], в котором решаемая техническая задача состоит в повышении точности определения продуктивных на углеводороды пластов, в том числе и определение глубины их залегания.
Технический результат, получаемый в результате реализации способа, состоит в уменьшении количества ошибочно пробуренных скважин, а также обеспечение возможности контроля эксплуатации промысловых скважин и газохранилищ при добыче нефти и газа.
Для достижения указанного технического результата по первому варианту предложено использовать способ поиска углеводородов, характеризуемый регистрацией сейсмических колебаний поверхности Земли с использованием приемников сейсмических колебаний, способных регистрировать сейсмические колебания в диапазоне от 0.1 до 20 Гц, причем приемники сейсмических колебаний располагают на расстоянии от 50 м до 500 м друг от друга, регистрацию проводят одновременно по всем измеряемым компонентам, разбивая временной диапазон регистрации измеренного на перспективной площади информационного сигнала на синхронизованные по времени для всех сейсмических приемников дискретные участки, проводят расчет спектральной характеристики, соответствующей каждому дискретному участку с образованием дискретной последовательности, анализируют каждый дискретный участок на наличие помехи, имеющей техногенную природу, и на наличие события, связанного с приходом сигнала от продуктивного пласта, исключают из дальнейшего рассмотрения те дискретные участки, которые не содержат события, связанного с приходом сигнала от продуктивного пласта в каждой из записей соответствующих компонент сейсмических приемников, а также дискретные участки, содержащие указанные помехи, и проводят анализ оставшихся дискретных участков с вынесением суждения о наличии или отсутствии углеводородов. При реализации способа дополнительно проводят измерение сейсмических колебаний в месте, заведомо не содержащем углеводородов, а о наличии нефти или газа судят по появлению отклонений в спектральной характеристике, по сравнению с местом, заведомо не содержащим углеводородов. Способ может быть реализован как на суше, так и на акватории, при этом соответственно сейсмические приемники располагают на суше, на дне акватории, либо заглубляя в приповерхностный слой, в водную среду, и/или на плавсредствах в местах, минимально подверженных собственным колебаниям корпуса плавсредства, причем плавсредства удалены на одинаковые расстояния от источника генерирования колебаний.
Согласно второму варианту для достижения указанного технического результата дополнительно измеряют микросейсмический шум Земли и о наличии углеводородов судят по появлению изменений спектральной характеристики не менее чем на одной из компонент при записи сигнала во время генерирования колебаний и/или после генерирования колебаний по сравнению с информационным сигналом, измеренным до генерирования. Предложенный способ может быть реализован также и на суше, и на акватории, поэтому сейсмические приемники располагают на суше, на дне акватории и/или на плавсредствах в местах, минимально подверженных собственным колебаниям корпуса плавсредства, причем плавсредства удалены на одинаковые расстояния от источника генерирования колебаний. Во всех случаях реализации предложенного способа обычно приемники сейсмических колебаний группируют, а также синхронизируют. Кроме того, в процессе математической обработки зарегистрированных результатов преимущественно информационный сигнал разбивают на временные участки, длительностью не менее 2-3 периодов сигнала наименьшей частоты диапазона.
В рамках реализации первого и второго вариантов может быть решена задача контроля эксплуатации углеводородной залежи. Для этого над залежью выбирают точки контроля, предпочтительно располагая их вблизи эксплуатационных скважин. В выбранных точках располагают приемники сейсмических колебаний, способные регистрировать сейсмические колебания в инфразвуковом диапазоне частот не менее чем по одной из компонент. Периодически регистрируют микросейсмический шум Земли. По исчезновению аномалии спектральных характеристик на частотах 0.1-20 Гц судят о прохождении контакта вода - углеводород под точкой контроля.
Аномальное поведение спектральных характеристик определяют любым из приведенных вариантов - без применения внешнего воздействия, анализируя поведение спектральных характеристик каждого дискретного участка разбиения временного диапазона, либо по отношению к спектральной характеристике информационного сигнала, зарегистрированного для участка, заведомо не лежащего над залежью, а также в варианте, с применением внешнего воздействия, используя те же алгоритмы обработки колебаний, но применяя их к записанному сигналу во время/после воздействия источника сейсмических колебаний, либо о переходе контакта вода - углеводород судят по появлению изменений спектральных характеристик не менее чем на одной из компонент при записи сигнала во время генерирования колебаний и/или после генерирования колебаний по сравнению со спектральными характеристиками информационного сигнала, измеренными до генерирования. Предпочтительно проводить регистрацию спектральной характеристики микросейсмического шума Земли для каждой точки в течение 40-60 мин.
При контроле степени заполнения подземного газохранилища природного газа выбирают точки на поверхности Земли, ориентировочно определяющие разные степени заполнения газохранилища, размещают в выбранных точках приемники сейсмических колебаний, способные не менее чем по одной компоненте регистрировать инфразвуковые колебания, и периодически регистрируют спектральную характеристику микросейсмического шума Земли, причем отсутствие аномального изменения спектральной характеристики информационного сигнала на частотах 0.1-20 Гц свидетельствует об отсутствии природного газа под точкой контроля. Для сравнения регистрируют аналогичным приемником микросейсмический шум Земли над местом, заведомо расположенным вне газохранилища. Предпочтительно выбирать точки контроля при первом заполнении газохранилища, определяя, в каких местах над газохранилищем отмечено присутствие природного газа при различных количествах поданного газа. Однако в любом случае точки контроля определяют опытным путем. Возможно проведение генерирования сейсмических колебаний в процессе регистрации. В этом случае регистрацию проводят как до начала генерирования, так и во время генерирования.
Используя, в частности, второй вариант (с генерацией), можно определять глубину залегания продуктивного на углеводороды пласта. Для этого используют не менее 4-х приемников сейсмических колебаний, способных по 3-м взаимно перпендикулярным компонентам регистрировать инфразвуковые колебания, размещая их в вершинах четырехугольника.
Во всех приведенных вариантах реализации данного изобретения принципиальным и важным этапом является процесс фильтрации записанного временного ряда от поверхностных шумов и выделение информационного сигнала. С этой целью используют группировку (расстановку) приемников сейсмических колебаний и кросскорреляционную обработку записанного сигнала.
Для реализации вышеизложенных вариантов используют приемник сейсмических колебаний, способный регистрировать колебания в инфразвуковом диапазоне, содержащий не менее одного датчика сейсмических колебаний, способного регистрировать инфразвуковые колебания, причем все используемые датчики расположены на жестком основании таким образом, что оси чувствительности датчиков расположены под фиксированными углами относительно плоского жесткого основания и относительно друг друга, причем каждый датчик подключен к блоку регистрации, а основание с датчиками размещено в жестком герметичном корпусе. Могут быть использованы датчики угловых и/или линейных колебаний, способные регистрировать колебания в инфразвуковом диапазоне частот. Преимущественно блок регистрации каждого датчика содержит последовательно соединенные предварительный усилитель сигнала, формирователь амплитудно-частотной характеристики и оконечный усилитель, причем каждый оконечный усилитель выполнен с возможностью подключения к общему регистратору.
Однако известный способ [6] основан на гипотезе о залежи нефти как единственно возможном источнике наблюдаемой аномалии в низкочастотном диапазоне сейсмического спектра. Вместе с тем практика показывает [7], что аномальные сигналы наблюдаются при наличии других существенных неоднородностей в разрезе, в частности в виде активных тектонических нарушений или при наличии подземных рек. Аномальный сигнал наблюдается также в целевом диапазоне при неглубоком залегании фундамента в точке исследования, соизмеримом с глубиной залегания углеводородов.
Кроме того, при размещении приемников сейсмических колебаний на плавсредствах или на глубинных горизонтах, необходимо исключать из результатов наблюдений составляющую сигнала, обусловленную шумами судоходства и скоростью подводных течений. При этом все используемые датчики должны быть расположены на жестком основании таким образом, что оси чувствительности датчиков расположены под фиксированными углами относительно плоского жесткого основания и относительно друг друга, что в условиях гидросферы обеспечить практически невозможно.
В известном способе низкочастотного сейсмического зондирования для поиска и разведки залежей углеводородов (варианты) [7] задача решается способом низкочастотного сейсмического зондирования для поиска и разведки залежей углеводородов, включающем определение по крайней мере одной точки наблюдения на поисковой площади, размещение в точке наблюдения приемника сейсмических колебаний, проведение регистрации информационных сигналов по их измеряемым компонентам в течение промежутка времени, достаточного для записи статистически достоверного шумового сигнала в инфранизкочастотном диапазоне, проведение расчета спектральных характеристик с использованием Фурье-преобразования полученных сигналов, их анализ на наличие ложных сигналов и сигналов от продуктивного пласта с природными углеводородами, исключение из рассмотрения ложных сигналов, проведение анализа оставшихся сигналов с вынесением суждения о наличии или отсутствии углеводородов, в котором в отличие от известного способа регистрацию и запись проводят по вертикальным компонентам информационных сигналов, Фурье-преобразование вертикальных компонентов информационных сигналов проводят по их первой производной, на полученных спектрах выявляют максимум, который характеризуют местоположением на спектре в диапазоне частот
Vs/H<F<Vp/H,
где Vs - средняя по осадочному чехлу скорость распространения поперечных сейсмических волн в точке наблюдения;
Vp - средняя по осадочному чехлу скорость распространения продольных сейсмических волн в точке наблюдения;
Н - известная глубина залегания фундамента в точке наблюдения,
сигнал с данным максимумом принимают за соответствующий резонансу между дневной поверхностью и фундаментом ложный сигнал - сигнал от фундамента, бесперспективной точкой наблюдения признают точку со спектром, в котором присутствует сигнал от фундамента с монотонным спадом амплитуды спектра в сторону больших частот от максимума сигнала от фундамента, точку наблюдения, в спектрах сигналов которой присутствуют максимумы на частотах, больших частоты максимума сигнала от фундамента, с их равномерным расположением со смещением относительно других измерений менее чем на половину ширины своего максимума, принимают как перспективную на наличие залежей от природных углеводородов. При этом при выявлении равномерного расположения сигналов возможно их сравнение относительно сигналов других измерений с одной точки наблюдения, или относительно сигналов с других каналов их записи с этой точки наблюдения при многоканальном способе наблюдения, или относительно сигналов их записей с соседних точек наблюдения при одноканальном способе наблюдения. При наличии точек наблюдения больше одной в районе исследования сигнал от фундамента дополнительно характеризует его присутствие в большинстве точек наблюдения.
Задача решается также вторым вариантом способа низкочастотного сейсмического зондирования для поиска и разведки залежей углеводородов [8], включающем определение по крайней мере одной точки наблюдения на поисковой площади, размещение в точке наблюдения приемника сейсмических колебаний, проведение регистрации информационных сигналов по их измеряемым компонентам в течение промежутка времени, достаточного для записи статистически достоверного шумового сигнала в инфранизкочастотном диапазоне, проведение расчета спектральных характеристик с использованием Фурье-преобразования полученных сигналов, ее анализ на наличие ложных сигналов и сигналов от продуктивного пласта с природными углеводородами, исключение из рассмотрения ложных сигналов, проведение анализа оставшихся сигналов с вынесением суждения о наличии или отсутствии углеводородов, в котором в отличие от известного способа регистрацию и запись проводят по вертикальным компонентам информационных сигналов, Фурье-преобразование вертикальных компонентов информационных сигналов проводят по их первой производной, на полученных спектрах выявляют максимум, который характеризуют местоположением на спектре в диапазоне частот
Vs/H<F<Vp/H,
где Vs - средняя по осадочному чехлу скорость распространения поперечных сейсмических волн в точке наблюдения;
Vp - средняя по осадочному чехлу скорость распространения продольных сейсмических волн в точке наблюдения;
Н - известная глубина залегания фундамента в точке наблюдения,
сигнал с данным максимумом принимают за соответствующий резонансу между дневной поверхностью и фундаментом ложный сигнал - сигнал от фундамента, бесперспективной точкой наблюдения признают точку со спектром, в котором присутствует сигнал от фундамента с монотонным спадом амплитуды спектра в сторону больших частот от максимума сигнала от фундамента, выявляют спектры сигналов, в которых присутствуют максимумы на частотах, больших частоты максимума сигнала от фундамента, указанные спектры классифицируют на две группы: 1) спектры с равномерным расположением максимумов сигналов со смещением относительно других измерений менее чем на половину ширины своего максимума, 2) спектры с неравномерным расположением максимумов сигналов со смещением относительно других измерений не менее чем на половину ширины своего максимума; точку наблюдения с сигналами со спектром первой группы определяют как перспективную на наличие залежи от природных углеводородов, сигналы со спектром второй группы определяют как ложные сигналы - сигналы от зоны возможных тектонических нарушений. При этом при выявлении равномерного или неравномерного расположения сигналов возможно их сравнение относительно сигналов других измерений с одной точки наблюдения, или относительно сигналов с других каналов их записи с этой точки наблюдения при многоканальном способе наблюдения, или относительно сигналов их записей с соседних точек наблюдения при одноканальном способе наблюдения. При наличии точек наблюдения больше одной в районе исследования сигнал от фундамента дополнительно характеризует его присутствие в большинстве точек наблюдения.
Данный способ позволяет отграничить ложные сигналы от сигналов от продуктивного пласта и тем самым резко повысить достоверность принимаемых решений. Регистрацию и запись сигналов проводят в широком диапазоне частот 0.5-50 Гц, соответствующем диапазону глубин залегания фундамента.
Способы поиска и разведки реализованы с использованием известных аппаратных средств, например с помощью мобильного цифрового сейсмометрического комплекса «Экспресс-4» разработки КБ «Геофизприбор» РАН (г.Москва). Блок-схема мобильного многоканального сейсмометрического комплекса включает следующие основные модули:
- комплект высокочувствительных сейсмических датчиков типа СМ-ЗКВ ADNR;
- выносной распределитель с кабельными линиями связи;
- регистрирующий модуль с блоком фильтров и усилителей, платой аналого-цифровых преобразователей, цифроаналоговых преобразователей, компьютером;
- GPS-приемник GARMIN 12 XL;
- блок питания;
- блок калибровки.
Датчики представляют собой магнитоэлектрические маятниковые сейсмоприемники, преобразующие скорость механических колебаний в электрический ток, при этом напряжение, возбуждаемое на концах рабочей обмотки приемника, пропорционально скорости колебания грунта. Регистрирующий модуль комплекса «Экспресс-4» обеспечивает прием сейсмических сигналов, их преобразование в цифровой код, регистрацию данных в различных форматах, привязку регистрируемых данных к единому времени, визуализацию входных данных, выполнение калибровки сейсмических каналов, предварительную оценку качества зарегистрированных данных. При обработке и анализе сигналов и их спектральных характеристик используются стандартные программные средства типа Mathlab версии 6.0 и выше.
При конкретных исследованиях и натурных испытаниях были использованы три сейсмических приемника - комплект высокочувствительных сейсмических датчиков типа СМ-ЗКВ ADNR мобильного цифрового сейсмометрического комплекса «Экспресс-4» с 4 каналами записей, расположенных на расстоянии 50-100 метров друг от друга, в диапазоне частот 0,5-50 Гц, соответствующем глубине залегания фундамента 6-8 км, запись сейсмических сигналов проводили одновременно для всех каналов записей в течение не менее 400 с, в результате приема и обработки сигналов были получены спектральные характеристики, включающие ложные сигналы от фундамента, сигналы от нарушений, сигнал от продуктивного пласта.
Недостатком данного способа является относительно невысокая достоверность, т.к. произвести генерирование сигнала в диапазоне 05,-1,0 Гц посредством трех однотипных сейсмических приемников, с одинаковой измерительной базой представляет собой сложную техническую задачу, особенно в морских условиях.
В известном способе [8] решается техническая задача повышения эффективности сейсморазведки для больших глубин. Техническим результатом является увеличение глубины сейсморазведки при одновременном повышении достоверности и эффективности сейсморазведки на различных глубинах за счет использования всего частотного диапазона микросейсмического сигнала, в том числе и сверхнизких частот.
При этом технический результат достигается за счет того, что в способе сейсморазведки, включающем предварительное определение дисперсионной кривой микросейсмических волн, характерной для исследуемой территории, путем проведения синхронной регистрации микросейсмических сигналов не менее чем тремя сейсмостанциями с вертикальными сейсмодатчиками с последующей оценкой по полученным данным зависимости кажущихся скоростей распространения микросейсмических волн от частоты сигнала, определение длин волн и частотного диапазона на основе анализа кажущихся скоростей, в котором микросейсмический сигнал состоит из волн Рэлея, размещение сейсмодатчиков на исследуемой территории таким образом, чтобы расстояние между ними составляло не более половины самой короткой длины волны Рэлея, определение амплитудной неидентичности измерительных каналов сейсмодатчиков в полосе частот микросейсмического сигнала путем одновременной регистрации микросейсмического сигнала всеми сейсмодатчиками в одной точке в течение времени, достаточного для установления стационарности спектра мощности микросейсмического сигнала, с последующим определением логарифмической разности спектров всех измерительных каналов сейсмодатчиков, регистрацию микросейсмического сигнала не менее чем двумя сейсмостанциями, одна из которых установлена стационарно в центральной части исследуемой территории, а остальные перемещаются по исследуемой территории, накопление спектра мощности микросейсмического сигнала в каждой точке измерений в течение времени, достаточного для установления стационарности спектра, расчет спектра пространственных вариаций микросейсмического сигнала для каждой точки измерений путем определения логарифмической разности спектра мощности для каждой точки измерений и спектра мощности микросейсмического сигнала, накопленного на сейсмостанции, установленной стационарно, в течение эквивалентного времени в тот же временной период с учетом амплитудной неидентичности измерительных каналов сейсмодатчиков, построение карты амплитудных вариаций микросейсмического сигнала для каждой частоты спектра пространственных вариаций, привязку каждой полученной карты соответствующей ей глубине Н согласно соотношению:
Н=λpK,
где К - экспериментально установленный числовой коэффициент, зависящий от слагающих пород,
λр - длина волны Рэлея, определенная по дисперсионной кривой, м.
Отличительными признаками известного способа является определение дисперсионной кривой микросейсмических волн с последующей оценкой зависимости кажущихся скоростей распространения микросейсмических волн от частоты сигнала, определение длин волн и частотного диапазона, состоящего из волн Рэлея, размещение сейсмодатчиков вышеуказанным методом, определение амплитудной неидентичности измерительных каналов сейсмодатчиков с последующим определением логарифмической разности спектров, регистрация микросейсмического сигнала сейсмостанциями, одна из которых установлена стационарно, накопление спектра мощности микросейсмического сигнала до установления стационарности спектра, расчет спектра пространственных вариаций микросейсмического сигнала для каждой точки измерений, построение карты амплитудных вариаций микросейсмического сигнала для каждой частоты спектра пространственных вариаций, привязка каждой полученной карты соответствующей ей глубине согласно вышеприведенному соотношению, что позволяет увеличить глубину сейсморазведки при одновременном повышении достоверности и эффективности сейсморазведки на различных глубинах за счет использования всего частотного диапазона микросейсмического сигнала, в том числе и сверхнизких частот. Микросейсмические сигналы представлены в общем случае суммой объемных и поверхностных волн типа Лява и Рэлея. При этом энергия поверхностных волн в микросейсмическом сигнале гораздо выше энергии объемных волн и при реализации способа они не учитываются. Использование вертикальных датчиков позволяет вычленить из поверхностных волн только волны Рэлея, которые содержат нулевую моду даже в отсутствие ярких отражающих границ, в отличие от волн Лява. Размещение сейсмических датчиков на расстоянии друг от друга не более половины самой короткой длины волны Рэлея позволяет достигнуть максимального разрешения способа по горизонтали. Учет амплитудной не идентичности измерительных каналов сейсмических датчиков позволяет исключить индивидуальные характеристики измерительных каналов при построении карт. Накопление спектра мощности микросейсмического сигнала в каждой точке измерений до установления стационарности спектра необходимо производить ввиду двойственности природы микросейсмического сигнала, который состоит из детерминированных цугов со случайными начальными фазами, случайными частотами, амплитудами и направлениями прихода. На достаточно больших временах эти детерминированные цуги представляют собой случайный стационарный сигнал. Именно эти стационарные характеристики, в том числе спектр мощности, определяются во время измерений. Расчет спектра пространственных вариаций микросейсмического сигнала для каждой точки измерений необходим для того, чтобы исключить влияние источников, формирующих микросейсмический сигнал. Построение карт амплитудных вариаций микросейсмического сигнала и привязку их к глубине производят для получения механических характеристик среды на различных глубинах.
Известный способ сейсморазведки [8] осуществляется следующим образом. Предварительно определяют дисперсионную кривую микросейсмических волн, характерную для исследуемой территории путем проведения синхронной регистрации микросейсмических сигналов не менее чем тремя сейсмостанциями с вертикальными сейсмических датчиками с последующей оценкой по полученным данным зависимости кажущихся скоростей распространения микросейсмических волн от частоты сигнала. Определяют длины волн и частотный диапазон микросейсмического сигнала на основе анализа кажущихся скоростей, в котором он состоит из волн Рэлея. Сейсмические датчики размещают на исследуемой территории таким образом, чтобы расстояние между ними составляло не более половины самой короткой длины волны Рэлея. Затем определяют амплитудную не идентичность измерительных каналов сейсмических датчиков в полосе частот микросейсмического сигнала путем одновременной регистрации микросейсмического сигнала всеми сейсмическими датчиками в одной точке в течение времени, достаточного для установления стационарности спектра мощности микросейсмического сигнала, с последующим определением логарифмической разности спектров всех измерительных каналов сейсмических датчиков. Регистрируют микросейсмический сигнал не менее чем двумя сейсмостанциями, одна из которых установлена стационарно в центральной части исследуемой территории, а остальные перемещаются по исследуемой территории. Проводят накопление спектра мощности микросейсмического сигнала в каждой точке измерений в течение времени, достаточного для установления стационарности спектра. Рассчитывают спектр пространственных вариаций микросейсмического сигнала для каждой точки измерений путем определения логарифмической разности спектра мощности для каждой точки измерений и спектра мощности микросейсмического сигнала, накопленного на сейсмостанции, установленной стационарно, в течение эквивалентного времени в тот же временной период с учетом амплитудной не идентичности измерительных каналов сейсмических датчиков. Строят карты амплитудных вариаций микросейсмического сигнала для каждой частоты спектра пространственных вариаций. Делают привязку каждой полученной карты соответствующей ей глубине.
Значение коэффициента К устанавливают экспериментально в ходе математического моделирования на основе метода конечных элементов распространения Рэлеевских волн в неоднородном полупространстве, сложенном породами, близкими к породам вулканического происхождения.
Использование предлагаемого способа сейсморазведки позволяет повысить достоверность сейсморазведки, дает принципиальную возможность провести сейсморазведку в местах, недоступных для применения искусственных источников, позволяет производить сейсморазведку на больших глубинах, позволяет производить сейсморазведку в режиме мониторинга без использования источников. Способ технически прост в исполнении, экологически чист, эффективен с точки зрения затрат.
Однако установление значения коэффициента К по экспериментальным данным путем математического моделирования осуществляется на допущении, что значение коэффициента К соответствует значению коэффициента в неоднородном пространстве, сложенном породами, близкими к породам вулканического происхождения. В случае, если породы неоднородного пространства сложены породами не вулканического происхождения, то значение коэффициента будет отличным от принятого, что повлечет за собой существенную погрешность в конечные результаты исследований.
Кроме того, при построении карт амплитудных вариаций микросейсмического сигнала используют метод триангуляции, при применении которого результаты вычислений дифференциалов различных порядков не являются достоверными.
Задачей заявляемого технического решения является повышение достоверности сейсмических исследований при поиске и разведке месторождений углеводородов.
Поставленная задача решается за счет того, что в способе сейсмической разведки при поиске углеводородов, включающем регистрацию естественного сейсмического фона и сейсмического сигнала на исследуемом пространстве, измеренных одним и более сейсмическими комплексами, с последующей математической обработкой измеренных значений, предварительное определение дисперсионной кривой микросейсмических волн, характерной для исследуемой территории, путем проведения синхронной регистрации микросейсмических сигналов не менее чем тремя сейсмостанциями с вертикальными сейсмическими датчиками с последующей оценкой по полученным данным зависимости кажущихся скоростей распространения микросейсмических волн от частоты сигнала, определение длин волн и частотного диапазона на основе анализа кажущихся скоростей, в котором микросейсмический сигнал состоит из волн Рэлея, размещение сейсмических датчиков на исследуемой территории таким образом, чтобы расстояние между ними составляло не более половины самой короткой длины волны Рэлея, определение амплитудной не идентичности измерительных каналов сейсмических датчиков в полосе частот микросейсмического сигнала путем одновременной регистрации микросейсмического сигнала всеми сейсмическими датчиками в одной точке в течение времени, достаточного для установления стационарности спектра мощности микросейсмического сигнала, с последующим определением логарифмической разности спектров всех измерительных каналов сейсмических датчиков, накопление спектра мощности микросейсмического сигнала в каждой точке измерений в течение времени, достаточного для установления стационарности спектра, расчет спектра пространственных вариаций микросейсмического сигнала для каждой точки измерений путем определения логарифмической разности спектра мощности для каждой точки измерений и спектра мощности микросейсмического сигнала, накопленного на сейсмостанции, установленной стационарно, в течение эквивалентного времени в тот же временной период с учетом амплитудной не идентичности измерительных каналов сейсмических датчиков, построение карты амплитудных вариаций микросейсмического сигнала для каждой частоты спектра пространственных вариаций, привязку каждой полученной карты соответствующей ей глубине; при этом выполняют регистрацию информационных сигналов по их измеряемым компонентам в течение промежутка времени, достаточного для записи статистически достоверного шумового сигнала в инфранизкочастотном диапазоне, осуществляют расчет спектральных характеристик с использованием Фурье-преобразования полученных сигналов, их анализ на наличие ложных сигналов и сигналов от продуктивного пласта с природными углеводородами, исключают из рассмотрения ложные сигналы, выполняют анализ оставшихся сигналов с вынесением суждения о наличии или отсутствии углеводородов, регистрацию и запись проводят по вертикальным компонентам информационных сигналов в диапазоне частот 0,5-50 Гц, соответствующем диапазону глубин залегания фундамента, Фурье-преобразование компонентов информационных сигналов проводят по их первой производной, на полученных спектрах выявляют максимум, который принимают за соответствующий резонансу между дневной поверхностью и фундаментом ложный сигнал - сигнал от фундамента, бесперспективной точкой наблюдения признают точку со спектром, в котором присутствует сигнал от фундамента с монотонным спадом амплитуды спектра в сторону больших частот от максимума сигнала от фундамента, точку наблюдения, в спектрах сигналов которой присутствуют максимумы на частотах, больших частоты максимума сигнала от фундамента, со смещением их относительно других измерений менее чем на половину ширины своего максимума, принимают как перспективную на наличие залежей от природных углеводородов, о наличии залежи углеводородов судят по изменению спектральной мощности информационного сигнала на измеренных частотах, в отличие от известных способов, определение дисперсионной кривой микросейсмических волн, характерной для исследуемой территории, путем проведения синхронной регистрации микросейсмических сигналов не менее чем тремя сейсмостанциями выполняют путем регистрации сейсмических шумов на частотах 0,008-20 Гц на границе вода - грунт, при этом выделяют из спектра горизонтальных составляющих нечетные гармоники 0,003 и 0,005 Гц, а из спектра вертикальной составляющей выделяют четные гармоники 0,002, 0,004, 0,006 и 0,008 Гц, при этом дополнительно измеряют вариации магнитного поля на частотах 0,01-1,0 Гц, магнитную индукцию электромагнитного поля на частотах 1-200 Гц, электрическую составляющую электромагнитного поля на частотах 1-500 Гц, акустические шумы на частотах 5-50000 Гц, гидродинамический шум моря на частотах 0,01-100 Гц в зонах тектонических разломов, по измеренным параметрам выполняют факторный анализ на уровнях естественного геофизического фона и геофизического фона в период фазы нахождения солнца и луны на одной небесной линии, путем построения графика амплитуд градиентов сейсмических, геодеформационных, геохимических, гидрофизических показателей при базе измерений, не превышающей 50-100 километров в средних широтах и 8-10 километров в высоких и экваториальных широтах соответственно, при этом учитывают короткопериодные вариации магнитного поля, вызванные морским волнением, минимизируют ошибки магнитной съемки, путем выявления тонкой структуры магнитных неоднородностей и определения их параметров, регистрацию гидроакустических сигналов выполняют с выделением фаз типа РР, S и Т, приход акустической волны сейсмического происхождения определяют по величине сдвига частоты рассеянного излучения, при этом посредством устройств регистрации, размещенных на удалении от прибрежной зоны, выполняют анализ низкочастотных составляющих рассеянного сигнала, используя в качестве опорных квазигармонических высокочастотных сигналов шумы судоходства, а посредством устройств регистрации, размещенных в прибрежной зоне, определяют момент появления и направление прихода сейсмических волн путем узкополосной фильтрации и спектрального анализа волн, выделение фаз типа РР, S и Т осуществляют путем узкополосной фильтрации посредством рекурсивных фильтров Баттерфорта, при этом входную фильтрацию осуществляют посредством рекурсивных фильтров с целочисленными коэффициентами, а сигналы с частотой дискретизации 100 Гц и ниже подвергают фильтрации с коэффициентами в виде чисел с плавающей запятой; регистрацию гидроакустических сигналов осуществляют посредством широкополосных донных сейсмографов с не менее чем тремя сейсмическими каналами, при этом сигналы анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается при совпадении сигналов по крайней мере в двух каналах из трех; спектральный анализ выполняют как объемных волн фаз РР и S, так и поверхностных волн Лява, Релея и Стоунли, построение карты амплитудных вариаций микросейсмического сигнала для каждой частоты спектра пространственных вариаций, а также привязку каждой полученной карты соответствующей ей глубине выполняют путем аппроксимации профиля рельефа по разрезу относительно береговой линии, а в качестве базового сплайна используют кубический сплайн с нулевыми граничными производными, при этом построение двумерной сплайн-функции производится путем тензорного произведения одномерных сплайнов; измерительную базу на морском дне формируют путем размещения сейсмических приемников на расстоянии не более 5 км друг от друга, с образованием равнобедренного треугольника в подводном пространстве, в вершинах которого размещены сейсмические приемники, при этом приемники сейсмических колебаний размещают в шельфовой зоне, вдоль линии подножия континентального склона и вдоль оси, перпендикулярной линии Гардинера по границам разлома, выявление локальных структур, перспективных в нефтегазоносном отношении, выполняют путем сейсмического профилирования посредством мобильной сейсмической станции с многократным перекрытием отражающих границ, а сейсмический комплекс для сейсмической разведки, состоящий их стационарных сейсмических приемников и мобильного многоканального сейсмометрического модуля, каждый из которых состоит из блока высокочувствительных сейсмических датчиков, регистрирующего модуля с блоком фильтров и усилителей, платы аналого-цифровых преобразователей, цифроаналоговых преобразователей, компьютера, GPS-приемника, блока питания, блока калибровки, блока обработки, анализа сигналов и их спектральных характеристик, программных средств типа Mathlab версии 6.0 и выше, в отличие от известных устройств, сейсмический комплекс включает плавательное средство, летательный аппарат, автономную сейсмическую донную станцию, придонную сейсмическую станцию, поплавковую сейсмическую станцию, при этом мобильный сейсмический модуль выполнен в виде управляемого подводного аппарата, плавательное средство снабжено подводным зондом, регистрирующая аппаратура сейсмического комплекса дополнительно содержит датчик обнаружения метана, гидрофизический модуль, донный сейсмометр, датчик магнитного поля с блоком управления, пенетрометр, гравиметр, устройство для возбуждения упругих колебаний в морской среде, донный датчик давления, модем гидроакустического канала связи, модем спутникового канала связи, блок пространственной ориентации, акустический доплеровский измеритель профиля течений, блок гидрохимических измерений.
Сущность предлагаемого технического решения поясняется чертежами.
Фиг.1. Размещение средств регистрации сейсмических сигналов.
На чертеже показаны: береговая линия 1, водная поверхность 2, континентальный шельф 3, склон 4, подножие континентального шельфа 5, линия Гардинера 6, разлом 7, плавательное средство 8, летательный аппарат 9, автономная сейсмическая донная станция 10, придонная сейсмическая станция 11, поплавковая сейсмическая станция 12, управляемый подводный аппарат 13, подводный зонд 14, искусственные спутники Земли 15.
Фиг.2. Схема тестовых измерений по профилю для выявления границы газогидратной залежи и границ ее разлома. На схеме показаны: граница зоны образования газогидратов 16, границы разлома 17, отражающий горизонт зоны газогидратов 18, профиль измерений 19, направление диффузии газов 20, а также водная поверхность 2, континентальный шельф 3, разлом 7, плавательное средство 8, летательный аппарат 9, автономная сейсмическая донная станция 10, придонная сейсмическая станция 11, поплавковая сейсмическая станция 12, управляемый подводный аппарат 13, подводный зонд 14, искусственные спутники Земли 15.
Фиг.3. Конструкция автономной сейсмической донной станции.
Конструкция автономной сейсмической донной станции 10 включает подводный спектроанализатор 21, раму 22, блок питания 23 для автономной работы, блок контроля радиоактивного загрязнения 24, прочный корпус 25, модем кабельной линии связи 26, блок регистрации и управления 27, силовую дугу 28, подводную аппаратуру гидроакустического телеуправления 29, ферму 30, гидрофизический модуль 31, донный сейсмометр 32, блок управления 33 датчиком магнитного поля, катушку прецессии 34, коммутационную коробку 35, пенетрометр 36, гравиметр 37, устройство для возбуждения упругих колебаний в морской среде 38, донный датчик давления 39.
Фиг.4. Конструкция придонной сейсмической станции. Конструкция придонной сейсмической станции состоит из рамы 40, на которой установлен сферический титановый прочный корпус 41, внутри которого установлены аппаратурные блоки. Корпус 41 соединен тросом 42 с размыкателем 43, который соединен якорным канатом 44 с якорем 45. На верхней части рамы 40 установлен выносной блок 46, внутри которого размещены устройства, предназначенные для сочленения придонной станции с судовым комплексом. На верхней части рамы 40 также установлены гидрофизический модуль 47, узлы и элементы спутникового 48 и гидроакустического 49 каналов связи. Рама 40 сочленена с анкерным устройством 50, на котором закреплен донный сейсмометр 51, в рабочем положении, размещаемый посредством анкерного устройства 50 на морском дне 3.
Фиг.5. Блок-схема придонной сейсмической станции.
Блок-схема придонной сейсмической станции включает сейсмический модуль 52, сейсмоакустический модуль 53, гидрофизический модуль 54, датчик магнитного поля 55, блок регистрации и управления 56, модем 57 гидроакустического канала связи 49, модем 58 спутникового канала связи 48, блок пространственной ориентации 59, гидроакустический размыкатель 60, акустический доплеровский измеритель профиля течений 61, блок гидрохимических измерений 62, датчик метана 63, донный датчик давления 64, радиомаяк 65, проблесковый маяк 66, блок питания 67.
Фиг.6. Блок-схема гидрофизического модуля 54. Блок-схема гидрофизического модуля 54 включает датчик скорости течения 68, датчик температуры 69, датчик электрической проводимости 70, датчик гидростатического давления 71, микропроцессор 72.
Фиг.7. Блок-схема датчика магнитного поля 55. Блок-схема датчика магнитного поля 55 включает феррозондовый датчик 73, фазовый чувствительный усилитель 74 ключевого типа, трехканальный АЦП 75, температурный датчик 76, выходной порт 77, ЦАП 78, 79, микроконтроллер 80, интерфейс 81, преобразователь 82 напряжение-ток, фильтр низких частот 83, обмотку компенсации 84, микрокомпьютер 85. Фазовый чувствительный усилитель 74, ЦАП 78, 79 и преобразователь 82 напряжение-ток образуют канал обработки сигналов по горизонтальной составляющей магнитного поля 8644. Аналогичные элементы образуют каналы 87 и 88, предназначенные для обработки сигналов по продольной и вертикальной составляющей магнитного поля, соответственно.
Фиг.8. Вид входного напряжения на АЦП 75.
Фиг.9. Алгоритм обработки данных при получении одного значения магнитного поля.
Фиг.10. Диаграмма направленности горизонтальных компонент трехкомпонентного векторного сейсмометра.
Фиг.11. Общий вид управляемого подводного аппарата. Управляемый подводный аппарат состоит из корпуса 89, маршевого движителя 90, вертикальных туннельных движителей 91, горизонтальных туннельных движителей 92. На корпусе 1 установлены антенны 93 и 94 соответственно гидроакустического и спутникового канала связи. Внутри корпуса расположены система навигации и управления движением 95, система позиционирования 96, комплекс гидроакустических средств 97 (промерный эхолот, профилограф, гидролокатор бокового обзора, измеритель скорости звука), приемник сейсмических сигналов 98, гравиметр 99 и магнитометр 100).
Фиг.12. Блок-схема устройства для возбуждения упругих колебаний в морской среде.
Устройство состоит из корпуса 101, сопла 102, свечи зажигания 103, катушки возбуждения 104, источника питания 105.
Фиг.13. Фрагменты записей сейсмических волн.
На фиг.13а представлен фрагмент записи землетрясения на юге озера Байкал.
На фиг.13б приведен пример записи вертикальной компоненты Сычуаньского землетрясения, на которой хорошо видны вступления объемных Р и S волн. Расстояние до эпицентра землетрясения около 5600 км.
На фиг.13в представлен фрагмент записи вертикальной компоненты сейсмоприемника землетрясения на о. Хонсю.
Подводный зонд 14 состоит из геофизической аппаратуры, которая включает измерительные датчики геофонного и гидрофонного типов, модули приема, регистрации, преобразования и хранения зарегистрированных сигналов, блоки сопряжения с бортовым модулем плавательного средства, гидроакустические измерительные средства - многолучевой эхолот, профилограф, гидролокатор бокового обзора, измеритель скорости звука.
Датчик обнаружения метана 63 представляет собой датчик типа METS ("CAPSUM"), который позволяют измерять концентрацию метана в водной толще. Датчик представляет собой полупроводниковый прибор, принцип работы которого заключается в том, что диффузия молекул углеводородов из воды через специальную силиконовую мембрану транслируется в камеру датчика. Адсорбция молекул углеводов на активном слое датчика приводит к электронному обмену с молекулами кислорода, таким образом, меняя сопротивление активного слоя, которое преобразуется в выходное (измеряемое) напряжение.
Основные характеристики датчика:
- 10 µм силиконовая мембрана;
- рабочая глубина 0-3500 м;
- рабочая температура 2-20°С;
- время измерения от 1 до 3 с;
- время стабилизации диффузии до 5 минут, в зависимости от турбулентности;
- входное напряжение 9-36 В;
- расход энергии 160 мА/ч;
- выходной сигнал - аналоговый 0-5 В и цифровой RS - 485;
- метан 50 нмоль/л - 10 µм моль/л.
Блок гидрохимических измерений 62 предназначен для измерения спектров комбинационного рассеяния оптического излучения в составе подводной обсерватории посредством спектроанализатора. По спектрам комбинационного рассеивания получают информацию о составе морской воды. Основные технические характеристики спектроанализатора: спектральный диапазон 0,52-0,78 мкм, полоса пропускания 0,54 нм на 0,783 мкм, точность позиционирования по спектру 0,2 нм, число спектральных каналов 4096.
Спектроанализатор 21 предназначен для измерения спектров комбинационного рассеяния оптического излучения в составе подводной станции. По спектрам комбинационного рассеивания получают информацию о составе морской воды. Основные технические характеристики спектроанализатора 1: спектральный диапазон 0,52-0,78 мкм, полоса пропускания 0,54 нм на 0,783 мкм, точность позиционирования по спектру 0,2 нм, число спектральных каналов 4096.
Пенетрометр 36 представляет собой зонд, установленный на телескопическом устройстве, и предназначен для выполнения морской грунтовой съемки. Пенетрометр представляет собой конусовидный снаряд, оснащенный датчиками, которые под действием силы тяжести заглубляются в грунт. Аналогом пенетрометра 36 является пенетрометр типа «СРТ Fugro» с глубиной проникновения зонда в грунт до 20 м. По измеренным коэффициентам сопротивления и трения определяются прочностные характеристики грунта.
Аналогом гравиметра 37 является гравиметр типа BGM-3, обеспечивающий выполнение точных измерений при больших помехах.
Блок контроля радиоактивного загрязнения 24 содержит модуль контроля радиационного загрязнения, который предназначен для определения in situ содержания гамма-излучающих радионуклидов (как техногенного, так и естественного происхождения) в морской воде.
Основные технические характеристики модуля контроля радиационного загрязнения: диапазон регистрируемых энергий 0,2-3,0 мэВ, энергетическое разрешение по линии цезия 137 13%, число уровней квантования спектра 256, максимальное число отсчетов в канале 65 000, максимальная скорость регистрации не менее 1000 1/с.
Блок гидрохимических измерений 62 содержит классификатор для классификации загрязнений морской воды по спектральным характеристикам и молекулярному составу морской воды. Аналогами датчиков блока гидрохимических измерений являются устройства, приведенные в источниках (1. Основные процессы и аппаратура химической технологии. Под ред. Дытнерского Ю.Н. - М., Химия, 1983. 2. Химико-аналитические комплексы фирмы Agilent Technologies (US), http://www.chem.agilent.com. 3. Химико-аналитические комплексы фирмы SRI Instruments (US), http://www.perichrom.com. 4. Химико-аналитические комплексы ЗАО "Хроматэк" (RU), http://www.chronomatec.ru.).
Гидрофизический модуль 47 состоит из двух основных компонент: акустического трехкомпонентного измерителя течений типа 3D-ACM модель 3ACM-CBP-S и измерителя электропроводности и температуры, выполненного на основе измерителя скорости течения типа CTS-C-1ED.
Датчик скорости течения представляет собой акустический измеритель течения и измеряет три компоненты скорости течения на одном горизонте и включает в себя трехкомпонентный магнитный компас для измерения магнитного поля Земли в трех проекциях, двухосевой электролитический инклинометр для измерения отклонения от вертикали, твердотельный датчик температуры. Принцип измерения скорости течения основан на измерении разности времен пролета акустического импульса в прямом и обратном направлении («времяпролетный» измеритель). Он может быть также оснащен датчиком давления, для измерения глубины постановки датчика скорости течения. Он также имеет интерфейс для подключения датчика солености и температуры и два входных канала постоянного тока для подключения внешних датчиков. Результаты измерений передаются в реальном времени в формате ASCII по последовательному интерфейсу RS-232 или RS-485 при скорости 19200 бит/с, либо записываться в стандартное статическое ОЗУ размером 0,5 МБ, питаемое литиевой батареей для последующего считывания. Он имеет глубину постановки до 7000 м и вариант «прибрежной» постановки до 1000 м глубины (в зависимости от конструктивного исполнения корпуса и диапазона измерения датчика давления),
Программное обеспечение (программа 3DACM97) позволяет конфигурировать и настраивать датчик с использованием стандартного пользовательского интерфейса Windows. Данные могут передаваться в режиме реального времени или считываться из внутренней памяти прибора. Данные, передаваемые в режиме реального времени, могут быть представлены в графическом виде на экране дисплея. Программное обеспечение в режиме реального времени принимает и сохраняет данные о векторе скорости, данные с трехкомпонентного компаса, инклинометра, данные с дополнительных датчиков, включая датчик солености, температуры, давления.
Данные о векторе скорости и показания инклинометра усредняются с помощью алгоритма векторного осреднения по временному интервалу от 15 секунд до 60 минут. Программа ACMPost позволяет графически отображать прочитанные данные на дисплее и сохранять данные по измерениям солености, температуры, давления в файле стандарта DAT C00 и HDR. Эти форматы также могут читаться программой ACMPost.
Датчик температуры и датчик электрической проводимости выполнены в виде единого модуля, который обеспечивает возможность высокоточного измерения электропроводности и температуры.
Электронный интерфейс обеспечивает выход напряжения постоянного тока пропорционально электропроводности и температуре. Управление выходом напряжения достигается посредством двух управляемых пользователем логических линий.
Датчики электропроводности и температуры основаны на датчике электропроводности с индуктивной связью. Индуктивные датчики демонстрируют естественную устойчивость, в отличие от датчиков, основанных на незащищенных электродах, при изменении их геометрии, которая вызывается биообрастанием. Большой внутренний диаметр датчика электропроводности устраняет необходимость в насосе или других искусственных средствах проведения потока воды через датчик. Использование высококачественного платинового термометра сопротивления приводит к линейным измерениям температуры, характеризуемым высокой стабильностью. Электронный сигнал очень линеен, что устраняет необходимость использования комплексных уравнений для преобразования выходных сигналов в физические величины.
Коммуникационный протокол модуля включает в себя развитую систему команд, позволяющую организовать работу с модулем наиболее удобным для пользователя образом.
Модуль может работать в одном из четырех режимов:
- режим RUN MODE (normal).
В этом режиме модуль осуществляет измерения всех параметров.
- режим RUN MODE (fast pressure)
В этом режиме измерения осуществляются только для датчика давления и передается значение только величины давления.
Режимы OPEN MODE (изменение констант калибровки) и CAL MODE (проведение калибровки) являются вспомогательными и используются при проведении метрологического обслуживания прибора. Измеренные величины автоматически пересчитываются в физические значения и в таком виде (в ASCII-кодах) передаются пользователю, а также записываются в память, откуда могут быть считаны позднее в произвольный момент времени.
Блок пространственной ориентации 59 представляет собой датчик пространственной ориентации и предназначен для использования в составе сейсмического модуля для определения точного положения в пространстве сейсмического модуля 52 и сейсмоакустического модуля 53.
В качестве датчика блока пространственной ориентации 59 используется модуль электронного компаса типа ТСМ 2.50, который представляет собой трехосевой курсовой компас с компенсатором наклона, конструктивно выполненный на одной плате с блоком электроники. Компас оснащен системой электронной компенсации, которая позволяет производить точные вычисления азимута, бортового наклона (крена) и килевого наклона (тангажа) при угловых положениях ±50 градусов.
Датчик магнитного поля 55 (фиг.7) изготовлен на базе чувствительного элемента феррозондового магнитометра типа LEMI-018B и предназначен для измерения 3-х компонент индукции магнитного поля Земли и их вариаций, а также температуры.
В состав датчика магнитного поля входят: блок сенсоров, в котором находятся первичные измерительные преобразователи магнитного поля, и блок электроники, который имеет встроенный термометр для измерения температуры внутри блока. Блок электроники и блок датчиков размещены в прочных корпусах и соединены специальным кабелем.
Феррозондовый магнитометр является полностью автономным автоматическим прибором, управляемым микропроцессорной системой, построенной на базе микроконтроллера.
Микроконтроллер 80 руководит работой магнитометра и передает данные о магнитном поле и температуре по UART порту. Магнитное поле измеряется феррозондовым датчиком 73, который располагается на расстоянии от 1 м и более от блока электроники. Феррозондовый датчик 73 и блок электроники соединены между собой специальным тестовым кабелем.
Феррозондовый датчик 73 возбуждается напряжением возбуждения с частотой f1=5236 Гц, Выходные сигналы датчика усиливаются и фильтруются с помощью фазовых чувствительных усилителей (ФЧУ) 74 ключевого типа. На их выходах формируется сигнал с частотой второй гармоники напряжения возбуждения f2=10472 Гц. Отфильтрованный сигнал поступает с выхода каждого ФЧУ на один из каналов трехканального аналого-цифрового преобразователя АЦП 75.
Программа обработки и оцифровки данных на примере одного канала магнитометра показана на фиг.8, на которой изображен сигнал, поступающий на вход АЦП 375, а также показаны моменты времени, в которые производится считывание амплитуды сигналов. Для вычисления одного значения магнитного поля используется формула (1).

Вычисление измеряемых значений UJ по такой формуле устраняет влияние температурного смещения нуля избирательного усилителя, а также АЦП 75.
Далее производится усреднение измеряемых n раз значений Uj (j=1…n) за период времени, кратный 20 мс (период частоты 50 Гц). Это позволяет уменьшить шумы по цепи входного сигнала, а также значительно ослабить влияние сети частотой 50 Гц. Выделение усредненной за этот период величины измеряемого сигнала Uc выполняется по формуле (2).

Ввиду большого значения n полученное среднее значение Uc по каждому каналу весьма устойчиво к случайным сбоям и используется для создания сигнала компенсации с помощью цифроаналоговых преобразователей ЦАП 78 и ЦАП 79, которые далее суммируются и преобразуются в ток компенсации с помощью блока преобразователя напряжение-ток (U/I) 82. Этот ток подается в обмотку компенсации Wc, создавая с ее помощью магнитное поле в объеме датчика, равное и противоположное по направлению измеряемому полю. Выходное напряжение тех же ЦАП 78 и 79 после прохождения через фильтр низких частот второго порядка с частотой среза 0.5 Гц (не показан) поступает на аналоговый выход магнитометра.
Коды, которые установились на ЦАП 78 и ЦАП 79 после завершения процесса компенсации, пропорциональны измеряемым значениям магнитного поля. Они далее поступают через управляющий микроконтроллер 80 и UART/RS-232 преобразователь 77 в микрокомпьютер 82. посредством которого визуализируются зарегистрированные данные, которые также записываются в файл на жестком диске.
На фиг.9 приведен алгоритм получения одного значения на выходе магнитометра.
Алгоритм выполняется в такой последовательности:
1. Начальные установки. Коммутируется необходимый магнитный канал, обнуляются рабочие регистры микроконтроллера, i=1, выбирается n из условия Т=20 мс.
2. Синхронизация по срезу импульса частоты возбуждения f1 магнитометра.
3. Синхронизация по срезу импульса второй гармоники частоты возбуждения магнитометра f2.
4. Считывание с АЦП i-го значения напряжения.
5. Повторяют пункты 3, 4, 5 до получения i=4.
6. Накопление данных и вычисление Uj по формуле (1).
7. Запоминание Uj.
8. Проверка того j=n, если нет, повторяем пункты с 2 по 8, если да, идем дальше.
9. По окончании цикла 20 мс вычисляют среднее значение Uc по формуле (2).
10. Проводят коррекцию значения ЦАП.
После включения магнитометра его АЦП 75 находится в насыщении и реализуется алгоритм начальной компенсации с линейно возрастающим сигналом на выходах ЦАП 78, что обеспечивает достаточно эффективный по скорости алгоритм компенсации, при котором разность между компенсирующим и измеренным полем будет постоянно уменьшаться. Если эта разность уменьшится до величины, меньшей ±2 нТл, АЦП 75 выйдет из насыщения и алгоритм компенсации изменится: необходимое значение компенсирующего сигнала вычисляется микропроцессором 82 по показаниям АЦП 75 и корректирует значение кода компенсации ЦАП 78. После этого включается другой компенсационный алгоритм, при котором значение кода ЦАП 78 остается неизменным (он осуществляет грубую компенсацию данной составляющей магнитного поля), а корректируется лишь код компенсации ЦАП 79 по показаниям АЦП 75. При максимальном значении измеряемого поля ±60000 нТл цена 1 бита ЦАП 36 составляет 1.8 нТл, а цена 1 бита ЦАП 37 - 0.01 нТл.
Выходное показание магнитометра для каждого из каналов представляется в виде 32 разрядного кода, который состоит из 16 разрядов, снимаемых с ЦАП 78, и 16 разрядов, которые снимаются с ЦАП 79 (выходные коды этих ЦАП перекрывают друг друга).
Возбуждение феррозондового датчика осуществляется специальной цепью возбуждения, создающей сигнал с минимальным содержанием второй гармоники. Параллельно напряжения с выходов ЦАП 78 и ЦАП 79, пропорциональные значениям измеряемых компонент индукции магнитного поля, после суммирования и фильтрации поступают на аналоговые выходы магнитометра.
При временном исчезновении питания или при сбое микроконтроллера инициируется автоматический перезапуск системы. После перезапуска магнитометр входит в рабочий режим, происходит компенсация внешнего магнитного поля и запись продолжается без вмешательства оператора.
Размещение магнитометров на разных горизонтах по глубине и тихоходном управляемом подводном аппарате позволяет учесть короткопериодные вариации магнитного поля, которые наблюдаются на всех широтах, существенно осложняясь за Полярным кругом, и их градиенты во времени и амплитуды таковы, что за 1 с поле может измениться более чем на 0,1 гаммы. Кроме того, появляется возможность учета вариаций, вызванных морским волнением, что позволяет минимизировать ошибки магнитной съемки, что обеспечивается путем выявления тонкой структуры магнитных неоднородностей и определения их параметров.
Учитывая, что опорные геологические разрезы обычно расположены далеко от районов работ, общим требованием к комплексированию является получение данных максимальным числом методов для более уверенной последующей геологической интерпретации. Это позволяет выявить структуры осадочной толщи, гравитационного и магнитного полей с целью тектонического районирования, а также выполнить картирование структур второго порядка, выявить локальные структуры, перспективные в нефтегазоносном отношении.
Сейсмическое, гравиметрическое и гидромагнитное профилирование выполняется с многократным перекрытием отражающих границ.
Блок регистрации и управления 27 предназначен для синхронной оцифровки и регистрации сигналов от сейсмических и иных датчиков различного типа. Оцифровка сигналов производится с помощью 8-канального дельта-сигма АЦП с разрешением в 24 бита. Он имеет энергонезависимую память объемом 16 Гб, а также дополнительную энергонезависимую память для хранения служебной информации и данных калибровки времени с частотой квантования 100 Гц, емкостью памяти 16 Гб и продолжительностью непрерывной записи 160 суток.
Подготовка блока регистрации и управления 27 к работе, а именно: проверка работоспособности, наличия необходимых сигналов, очистка и проверка памяти, установка и проверка внутренних часов реального времени производится посредством судового комплекса через последовательный интерфейс типа RS-232. Считывание зарегистрированных данных производится с помощью специального дополнительного устройства по интерфейсу USB.
Передача цифровой телеметрической информации от сейсмических станций производится блоками 256 Байт посредством подводной аппаратуры телеуправления 29.
Для повышения достоверности передачи цифровой телеметрической информации в аппаратуре применяется избыточное кодирование циклическим кодом (2072,2048) в сочетании с принципом повторной передачи по автозапросу информационных блоков с обнаруженными ошибками.
Управление передачей цифровой информации осуществляется дистанционно по радиомодему.
Обмен сигналами между плавательным средством и сейсмическими устройствами осуществляется в последовательном виде старт-стопными комбинациями на скорости 14400 Бод.
Алгоритм основного режима работы диспетчерских станций (установленных на плавательном средстве или летательном аппарате) при обслуживании сети из нескольких автономных сейсмических донных станций 10, придонных сейсмических станций 11, поплавковых сейсмических станций 12 и управляемого подводного аппарата 13, перед их постановкой в морской среде, заключается в обеспечении информационной связи между ними и диспетчерской станцией, которая осуществляется по гидроакустическому каналу связи по методу доступа с временным разделением абонентов. К одной диспетчерской станции одновременно возможно подключение до 8 подводных станций, работающих в автономном необслуживаемом режиме.
Количество измерительных каналов в каждой подводной станции зависит от решаемой задачи в конкретном месте ее постановки. В принципе, максимальное количество цифровых измерительных каналов может быть до 30, а аналоговых - до 6.
Управляющий компьютер диспетчерской станции и программно-математическое обеспечение, служба реального времени предназначены для управления оборудования подводной станции, диагностирования ее неисправностей, приема данных, получаемых с подводной станции и размещения получаемых данных на устройствах накопления информации. Функционирование всего аппаратно-программного комплекса определяется файлом конфигурации, который создается специальной программой и задает наличие подводных станций, тип используемых геофизических каналов, параметры каналов, а также наличие или отсутствие аппаратуры синхронизации времени (приемник GPS).
При запуске программы регистрации считывается конфигурация всей сети подводной станции и производится привязка времени по Гринвичу с точностью до нескольких десятков микросекунд и расчет поправок к частоте кварца компьютера для поддержания функционирования комплекса в случае кратковременного отказа приемника GPS. Синхронизация времени осуществляется каждую секунду от приемника GPS.
Вслед за синхронизацией происходит опрос, программирование, синхронизация и запуск оборудования отдельных подводных станций. Запрашивается состояние оборудования каждой подводной станции (ее исправность, наличие каналов, исправность каналов и т.д.). В случае возникших проблем на экран выдается соответствующее сообщение (оно также записывается в файл протокола функционирования). В блок регистрации и управления подводной станции передается программа работы для каждого измерительного канала, частота опроса и коэффициент усиления.
Перед запуском каждый блок управления и регистрации синхронизируется по времени компьютера диспетчерской станции (в дальнейшем синхронизация проводится каждые 10 с). При синхронизации учитывается время прохождения сигнала от компьютера диспетчерской станции до синхронизируемого блока регистрации и управления 27. После этого блок регистрации и управления 27 запускается и начинает сбор данных с измерительных каналов. Блок регистрации и управления в каждой подводной станции работает независимо и всю информацию сжимает и складывает в буферную память.
Управляющий компьютер диспетчерской станции циклически запрашивает у соответствующего блока управления и регистрации 27 данные о зарегистрированных датчиками сигналов и, в случае их наличия, принимает их и записывает в свои буфера в оперативной памяти. После накопления достаточного количества данных для канала они переписываются в файл, соответствующий типу канала. Обычно эти файлы расположены на другом компьютере и доступны по локальной сети, хотя для кратковременных экспериментов система может быть сконфигурирована таким образом, что будет использоваться локальный диск. При кратковременных разрывах связи (до 10 мин) данные не теряются в силу наличия у каждого блока управления и регистрации 27 достаточно большого собственного буфера. В процессе обмена данными оператором может быть проведена калибровка любого измерительного канала, входящего в состав сети диспетчерской станции. При возникновении нештатных ситуаций (разрыв связи с подводной станцией, его поломка, отказ отдельных каналов, либо восстановления вышеперечисленного), а также некоторых штатных ситуаций - возникновение события или запуск калибровки соответствующего измерительного канала выдается сообщение на экран, включающее время по Гринвичу наступления ситуации, имена подводных станций и канала и само сообщение. Сообщения также записываются в буфер размером 100 строк и в файл протокола. Буфер может быть просмотрен оператором в любое время.
Устройство для возбуждения упругих колебаний в морской среде 38 содержит корпус 101, сопло 102, свечу зажигания 103, катушку возбуждения 104, источник питания 105.
Корпус 101 выполнен цилиндрической формы. Цилиндр выполнен двустенным из антикоррозийного металла, состоящим из двух корпусов (внешний корпус и внутренний корпус). Между внешним и внутренним корпусами, образующими полость, размещен макролон для придания корпусу 101 жесткости. В полости размещены источник питания 105 и катушка возбуждения 104. В верхней части корпус 1 сочленен с соплом 102, внутренняя поверхность которого снабжена вертикальными ребрами для повышения акустических свойств. Размещение источника питания 105 и катушки возбуждения 104 в полости с макролоном обусловлено гашением акустических сигналов, возникающих при работе источника питания 105 и катушки возбуждения 104.
Устройство работает следующим образом. При погружении устройства морская вода через сопло 102 поступает в цилиндр и заполняет внутренний объем цилиндра. С источника питания 105 напряжение порядка 27 В поступает на катушку возбуждения 104, с которой электрический сигнал поступает на свечу зажигания 103, на которой образуется электрический разряд порядка 1000 А. При этом происходит электрохимическая реакция между ионами кислорода и водорода, в результате которой возникает акустическая волна. Акустическая волна через сопло 102, внутренняя поверхность которого снабжена вертикальными ребрами, распространяется в морской воде. Акустическая волна регистрируется приемниками акустических сигналов, расположенных как непосредственно в зонах установки устройств для возбуждения упругих колебаний, так и в прибрежной зоне.
Донный датчик давления 39 представляет собой кварцевый измеритель давления.
Известные аналогичные устройства, основанные на использовании глубоководных регистраторов волны цунами, устанавливаются, как правило, вдоль защищаемого побережья. Такие регистраторы производят измерение давления или толщины водного слоя и должны иметь очень высокую чувствительность. Высота волны цунами в открытом океане в 10 см может многократно увеличиваться на мелководье и представлять существенную опасность. Поэтому при постановке на глубину, например, 3 км регистраторы должны иметь чувствительность не хуже 3×10-5.
Такую чувствительность обеспечивают только кварцевые измерители давления. При этом для измерения толщины водного слоя используют донные эхолоты, что необходимо для компенсации погрешности, обусловленной неравномерностью распространения скорости звука в воде.
При этом зарегистрированные сигналы, в виде синусоидальных колебаний, измеряемого параметра при наложении на них акустических и гидродинамических шумов техногенного характера, могут быть как периодическими, так и апериодическими, что требует получения многочисленных массивов измеряемого параметра для выявления амплитуды, статистически достоверно отличающейся от фоновой для достижения положительного технического результата.
Кроме того, отрицательное воздействие на достоверность прогноза оказывает появление микросейсмических штормов (резких и относительно кратковременных увеличений уровня микросейсм на дне), вызываемых сильными морскими штормами, придонными течениями и сейсмической активностью, как от удаленных землетрясений, так и сейсмоакустическими колебаниями от группы местных землетрясений и сейшевыми колебаниями поверхности воды, возникающими при приливах и вызванные при этом приливными течениями.
При этом на очень низких частотах (ниже 0,01 Гц) вследствие пренебрежительно малой толщины слоя океана по сравнению с длиной волны, колебания, вызванные микросейсмами, могут продолжаться несколько часов (10 и более), которые известными устройствами не регистрируются.
Сейсмоакустический модуль 53 включает блок высокочувствительных сейсмических датчиков, регистрирующий модуль 12 с блоком фильтров и усилителей, плату аналого-цифровых преобразователей, плату цифроаналоговых преобразователей, компьютер, блок калибровки, блок обработки, анализа сигналов и их спектральных характеристик, программных средств типа Mathlab версии 6.0 и выше.
Сейсмический модуль 52 выполнен в виде блока широкополосных преобразователей, который включает три датчика, ориентированных по трем плоскостям. Каждый датчик выполнен в виде герметичного цилиндрического сосуда, разделенного перегородкой на два отсека, заполненных электропроводящей жидкостью, перегородка снабжена отверстием. В середине и по бокам цилиндрического сосуда расположены сетчатые электроды, торцы цилиндра выполнены в виде упругих мембран.
Блок широкополосных преобразователей состоит из первичных датчиков и блока обработки. Каждый первичный датчик представляет собой герметичный цилиндрический сосуд, разделенный толстой перегородкой на два отсека, заполненных специальной электропроводящей жидкостью (водный раствор йодистого калия и йода). Чтобы жидкость могла протекать из одного отсека в другой, в центре перегородки сделано тонкое отверстие, а торцы цилиндра выполнены в виде упругих мембран (в другой конструкции вместо мембран в каждом отсеке имеются полости, заполненные инертным газом). В середине и по бокам отверстия расположены сетчатые платиновые электроды, на которые подается слабое постоянное напряжение: плюс на центральный анод и минус на катоды. В результате происходит равновесная окислительно-восстановительная реакция. При увеличении прямого напряжения ток через ячейку растет вначале быстро, затем при достижении равновесного состояния ионов при напряжении Uнас наступает ток насыщения Iнас, который меняется достаточно медленно. При достижении напряжения пробоя Uнас ток через ячейку резко увеличивается. При напряжении обратной полярности протекает малый обратный ток. Рабочая область лежит в пределах от Uнас до Uпр. Рабочую точку обычно устанавливают в средней части этой области при Up≈0,5 В. Для компенсации начального тока Iнас использованы две электролитические ячейки в одном корпусе, которые образуют дифференциальную схему, позволяющую обеспечить нулевое напряжение на выходе. При приложении механических колебаний вдоль оси цилиндра происходит перетекание инерционной жидкости через отверстие в такт колебаниям. За счет механического переноса ионов равновесное состояние нарушается, и между электродами появляется ток, пропорциональный механическому воздействию. Первичные датчики устанавливаются в горизонтальной и вертикальной плоскостях. Основными преимуществами датчиков является малая чувствительность к ударам (до 30g), возможность регистрировать сигналы, в вертикальном, горизонтальном и азимутальном направлении, а также малые габариты и вес, экономичное электропитание.
Блок обработки осуществляет сбор, оцифровку и накопление сигналов от датчиков. Подсистема представляет собой программно-аппаратный комплекс для Intel-совместимого семейства процессоров и снабжена средствами отладки и тестирования. При этом предусмотрены три режима регистрации сигналов: непрерывный, старт-стопный по заданной программе и старт-стопный с управлением по уровню сигнала. Управление параметрами блока обработки производится по результатам экспресс-обработки сигналов на основе анализа уровня энергии и спектрального состава с помощью быстрых алгоритмов реального времени.
Аппаратная часть подсистемы сбора и регистрации данных состоит из следующих основных элементов: цифрового регистратора, блока хранения точного времени, канала связи, центрального микрокомпьютера с накопителем на жестком магнитном диске.
Цифровой регистратор блоков регистрации и управления 27 и 56 представляет собой микромодульный контроллер на базе Intel-совместимого процессора NEC V25 с PCMCIA флэш-накопителем и стандартным выходным средством коммуникации на основе интерфейса RS232. Микроконтроллер содержит встроенный многоканальный АЦП с последовательным интерфейсом, программируемые таймеры, часы реального времени, порты цифрового ввода-вывода, внешние каналы аппаратного прерывания и канал прямого доступа к памяти. Отличительными особенностями используемого контроллера являются миниатюрные размеры (100×70×30 мм), малое потребление (0,5 Вт), высокая надежность и низкая стоимость,
Блок хранения точного времени сконструирован с использованием энергосберегающих технологий, полностью на КМОП-элементах. Используется как генератор эталонных минутных (секундных) меток для синхронизации часов микроконтроллера центрального микропроцессора.
Сейсмический модуль 52 функционально объединен и с сейсмоакустическим модулем 53 для обеспечения проведения измерений одновременно несколькими датчиками различных конструкций, что приводит к повышению точности и надежности проводимых измерений.
Сейсмический модуль 52 предназначен для обеспечения непрерывного сейсмического мониторинга морского дна в широком частотном диапазоне.
Сейсмический модуль 52 включает в себя датчики:
- электрохимический велосиметр типа СМЕ-ЗОП-3, представляющий собой трехкомпонентный сейсмический датчик, предназначенный для регистрации сейсмических колебаний донной поверхности вдоль трех ортогональных направлений;
- датчик сильных движений, представляющий собой трехкомпонентный векторный сейсмометр;
- датчик пространственной ориентации.
Датчик сильных движений снабжен сенсором, который состоит из магнитоупругого кристаллического преобразователя, постоянного магнита высокой энергии, трех независимых электрических обмоток и единой инертной массы, а также предварительного усилителя. Датчик сильных движений преобразует три компоненты вектора акустических колебаний донной поверхности по трем ортогональным направлениям в электрические сигналы. Датчик сильных движений имеет велаксметрическую характеристику, которая, по сравнению с характеристиками традиционных приборов для измерения вибросмещений, имеет высокую частотно-зависимую чувствительность к смещениям. Чувствительность датчика сильных движений при увеличении частоты в 10 раз увеличивается в 1000 раз.
Для сравнения следует упомянуть, что при таком же увеличении частоты чувствительность обычных велосиметров увеличивается в 10 раз, а обычных акселерометров - увеличивается в 100 раз.
Собственные шумы магнитоупругого сенсора меньше собственных шумов сейсмометра и намного меньше собственных шумов акселерометра.
Магнитоупругий сенсор датчика сильных движений с крутой амплитудно-частотной характеристикой может одновременно регистрировать смещения в существенном диапазоне - более 240 дБ, что позволяет одновременно измерять амплитуды смещений менее 10-15 м на частотах более 1000 Гц и более 10-3 м на частотах менее 1 Гц.
Центральный микропроцессор каждой подводной станции собран на базе PC-совместимого оборудования для автоматизации промышленности с использованием процессорной платы типа MicroPC фирмы Octagon Sistems (США). Примененная конструкция отвечает жестким требованиям промышленной эксплуатации, в частности, она способна выдерживать большие перегрузки при ударах и имеет повышенную наработку на отказ. Сохранив вычислительную мощность современного персонального компьютера, он имеет малые габариты, вес и энергопотребление (несколько единиц ватт). При этом, что особенно важно для герметичной донной станции, не требуется дополнительного охлаждения (вентилятора). Наличие 16- разрядного IDE интерфейса для накопителя на жестком магнитном диске позволяет применять современные накопители повышенной емкости и соответственно увеличить время автономной работы станции, используя режим непрерывной регистрации. Система регистрации в целом оказывается полностью совместимой с PC и работает под управлением ROM-DOS (DOS 6.22).
Для расширения динамического диапазона регистрируемых сигналов под каждую регистрируемую компоненту отводится два канала усиления, чувствительный и грубый, с соотношением коэффициентов усиления K1/К2=2n, где n выбирается из уровня реального сейсмического фона в месте установки станции. Таким образом, удается довести динамический диапазон станции в условиях малых помех до 130 дБ с использованием недорогого и надежного 12-разрядного АЦП.
Служба точного времени реализована на основе периодической синхронизации внутренних часов микроконтроллера ПЦР эталонными минутными метками от блока хранения точного времени.
Так как данные регистров часов реального времени микроконтроллера могут обновляться с некоторой задержкой, то для достижения требуемой точности службы времени используются секундные метки блока хранения точного времени или смесь секундных и минутных меток, которые вводятся через один из цифровых входов микроконтроллера в такт с частотой преобразования аналогового сигнала и записываются в младший бит слова АЦП. Таким образом, оцифрованные данные содержат бит пилот-сигнала, фронт которого оказывается привязанным к фронту эталонной метки с точностью не хуже одного отсчета.
Основное время центральный микропроцессор станции находится в режиме "Sleep" и включается только на время переписи данных с флэш-карты на жесткий диск и для выполнения контрольных функций по обслуживанию станции. Использование режима "Sleep" позволяет резко снизить энергозатраты станции в целом.
Программное обеспечение подводной станции целиком написано на языке высокого уровня Си, который, вместе с тем, позволяет производить тонкое управление аппаратными средствами вплоть до побитовых операций в их регистрах, характерными для ассемблера. Применение компиляторов языка Си фирмы Borland позволяет путем соответствующей настройки среды компилятора генерировать коды, в значительной степени инвариантные к типу и классу используемого IBM-совместимого компьютера. В результате программа оказывается работоспособной для всех типов процессоров, начиная с семейства 8086/8088 и заканчивая 80486 и Pentium.
Версия программы размещается в EPROM микроконтроллера. Запуск программы на исполнение и соответственно начало работы происходит автоматически при подаче питания на микроконтроллер.
Оцифровка сейсмических сигналов происходит с использованием механизма внешних прерываний сигналами программируемого внутреннего таймера микроконтроллера. Оцифровка и сбор данных осуществляются с элементами предварительной обработки для улучшения метрологических характеристик каналов регистрации. Аналоговые сигналы цифруются на более высокой частоте, затем подвергаются цифровой фильтрации и осреднению "тройками" и "пятерками" с последующей разрядкой до получения требуемой частоты выборок. Все процедуры фильтрации в системе выполняются в реальном времени с помощью быстрых рекурсивных фильтров Баттерворта. Применяются два вида фильтров. В характерных точках программы с высокой скоростью канализации данных (например, при входной фильтрации) целесообразно использовать рекурсивные фильтры с целочисленными коэффициентами. Такие фильтры не требуют вычислений с плавающей запятой и оказываются значительно быстрее своих аналогов с "точными" коэффициентами. Однако следует учитывать, что процедура округления коэффициентов вызывает ряд известных проблем и, в частности, может привести к неустойчивости фильтра. В других характерных узлах программы, где цифровой фильтрации подлежат отсчеты с частотой дискретизации 100 Гц и ниже, оказывается возможным применять рекурсивные фильтры с "точными" коэффициентами, представленными в виде чисел с плавающей запятой. Такие фильтры более устойчивы, функционально ближе к своему аналоговому прототипу, но проигрывают в быстродействии. Рекурсивные фильтры подобного типа используются, в частности, в алгоритме детектора сейсмических сигналов. Обычно в аналоговых и цифровых устройствах лучший результат дают фильтры Баттерворта высокого порядка, полученные путем каскадного соединения звеньев второго порядка.
С целью увеличения времени автономности станции кроме непрерывного режима работы предусмотрен ждущий режим регистрации с краткой записью предыстории события. Для организации ждущего режима в системе используется наиболее часто применяемый для целей обнаружения сейсмических сигналов так называемый STA/LTA - детектор, использующий алгоритм отношения энергий сигналов с короткопериодным и долгопериодным усреднением. Недостатком такого детектора, как известно, является пропуск первого вступления при работе по сильно когерентному сигналу. Для улучшения характеристик детектора разработана трехканальная версия с использованием признака группового совпадения "2 из 3-х". Это означает, что данные трех сейсмических каналов анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается только при совпадении сигналов тревоги по крайней мере в двух каналах из трех. Такой метод повышает надежность работы системы в ждущем режиме. В случае обнаружения события в системе вырабатывается сигнал, разрешающий сохранить предыдущий файл данных во внешней памяти, в противном случае - он стирается. Таким образом, осуществляется ждущий режим регистрации с записью фона перед событием.
Программа цифрового регистратора содержит телекоммуникационный драйвер, который поддерживает полудуплексный режим связи с центральным компьютером донной станции. Связь осуществляется на основе высокопроизводительного бинарного протокола обмена с использованием отдельных сигналов интерфейса RS232. Управление связью и накоплением данных осуществляет центральный микропроцессор станции. Программа управления поддерживает файловую организацию, принятую в DOS. Массивы данных сохраняются на жестком диске в файлах, формат которых удовлетворяет принятым станционным требованиям, и при необходимости с помощью простейшего программного супервизора формата могут быть интегрированы в любой из существующих в мировой практике форматов обмена сейсмологическими данными.
В отличие от известных устройств, в которых применяется отдельный аналоговый регистратор с частотным диапазоном от 0,1 до 15 Гц, в применяемом устройстве использован регистратор с нижним частотным диапазоном от 0,003 Гц.
Управление работой всей станции производится с помощью центрального микропроцессора типа MicroPC, а основное накопление сигналов осуществляется на жестком диске. Все это позволило расширить частотный диапазон цифрового регистратора до 15 Гц сверху, динамический диапазон - до 120 дБ (с автоматическим переключением чувствительности на 2 поддиапазона) и полностью исключить аналоговую регистрацию.
При регистрация сейсмических сигналов на дне одним из важных направлений использования широкополосных донных сейсмографов является исследование микросейсмических шумов, возбуждаемых морскими и океаническими волнами. Микросейсмы проявляются в широком диапазоне частот и служат естественным фоном, который определяет порог чувствительности сейсмографов. Посредством предлагаемого устройства также выполняется регистрация характерных микросейсм с периодом около 6 с, также выявляются микросейсмы с периодами 20 и 100 с, что позволяет выделить как объемные Р и S волны, так и поверхностные волны Лява (колебания в диапазоне частот 0,0125-0,05 Гц) и Рэлея.
В то же время возбуждение сейсмических волн в сжимаемой жидкости сопровождается генерацией гидроакустических полей в более широком частотном диапазоне, а их энергия может превышать энергию, например, волн цунами. При этом низкочастотные поля (F<1 Гц), так же как и волны цунами, возбуждаются в основном за счет вертикальных подвижек дна в эпицентре землетрясения. Возбуждение высокочастотных гидроакустических полей (фаза Т) происходит на значительно большей площади и существенно зависит от рельефа дна. Поэтому высокочастотные гидроакустические поля содержат относительно меньше информации собственно о формах движения дна в эпицентре землетрясения.
Наличие интенсивных низкочастотных акустических полей, например в очаге цунами, наблюдается в диапазоне 0,05-0,4 Гц, при этом основная энергия упругих колебаний превышает энергию волны цунами примерно в 300 раз (Левин Б.В., Носов М.А. Физика цунами. М.: Янус - К. 2005. 360 с.).
На очень низких частотах (ниже 0,01 Гц), вследствие пренебрежимо малой толщины слоя океана по сравнению с длиной волны происходит непосредственное возбуждение анемобарических волн за счет перепадов атмосферного давления (Рабинович А.Б. Длинные гравитационные волны в океане: захват, резонанс, излучение. С.-П.: Гидрометеоиздат, 1993, 325 с.). Часть энергии микросейсм, распространяющихся под малыми углами к вертикали, рассеивается в толще Земли в виде объемных волн в соответствии с законом 1/R2. Другая часть микросейсм вследствие рефракции или отражения от нижележащих слоев возвращается к верхней границе и претерпевает повторные отражения и преобразования продольных волн в поперечные и наоборот. При этом могут образовываться поверхностные волны разных типов, которые могут распространяться на большие расстояния с малым затуханием (энергетический коэффициент затухания пропорционален 1/R). При этом образуются волны Рэлея, Стоунли и Лява. Скорость волн Рэлея всегда больше скорости звука в воде. Поэтому на достаточно высоких частотах, когда длина волны в водном слое соизмерима с глубиной океана, часть энергии волн Рэлея переходит в воду. Амплитуда волн при этом уменьшается. Оценки показывают, что влияние слоя воды при глубине океана 4 км начинает сказываться на частотах около 0,01 Гц. На частоте около 0,1 Гц волна, отраженная от поверхности жидкости, проходит на дно в противофазе, т.е. происходит максимальное подавление волны Рэлея. Наибольшее затухание при этом претерпевает основная мода, так как ее пучность расположена на границе вода - грунт. Высшие моды затухают меньше, поскольку имеется ряд пучностей этих мод в нижележащих слоях. За счет обмена акустической энергией между жидкостью и упругим основанием при достаточной глубине океана может возникнуть и распространяться вдоль дна поверхностная волна Стоунли. При этом вдоль вертикали по обе стороны границы располагаются неоднородные затухающие волны. При глубине океана 4 км образование волн Стоунли возможно на частотах, начиная примерно с 1 Гц, а на частотах выше 10 Гц ограничивающим влиянием глубины океана можно пренебречь. Скорость волны Стоунли меньше скорости волн в воде и грунте, поэтому отсутствуют потери энергии за счет "вытекающих" волн. Отсюда следует, что возможно распространение волн Стоунли вдоль морского дна на большие расстояния на высоких частотах в отличие от волн Рэлея. Поверхностные волны Лява представляют собой поперечные колебания с горизонтальной поляризацией. Поэтому они не могут непосредственно возбуждаться волнами, падающими на границу из водной среды или за счет перепадов анемобарического давления. Их появление в составе микросейсм связано с преобразованием волн Рэлея на неоднородностях земной коры, а также с сейсмической эмиссией из коры и верхней мантии.
Узлы и элементы, представляющие собой раму 22 и 40, силовую дугу 28, трос 42, размыкатель 43, якорный канат 44, якорь 45, анкерное устройство 50, радиомаяк 65 и проблесковый маяк, предназначены для постановки подводных станций и их поднятия.
Способ реализуется следующим образом.
Размещают средства регистрации гидроакустических сигналов, представляющие собой широкополосные донные сейсмографы непосредственно на границе вода - грунт в прибрежной зоне и на удалении от прибрежной зоны, а также на разных горизонтах по глубине с использованием для установки автономных сейсмических донных станций 10, придонных сейсмических станций 11, поплавковых сейсмических станций 12.
На береговых мобильных станциях устанавливают широкополосные сейсмографы типа "G.Streckeisen Messgeratebau" (Швейцария) и "Guralp" (Англия), типа STS-1 и CMG-3 или широкополосные сейсмографы типа ЭХП-17, ЭХП-20.
Измерительную базу на морском дне формируют путем размещения сейсмических приемников на расстоянии не более 5 км друг от друга, с образованием равнобедренного треугольника в подводном пространстве, в вершинах которого размещены сейсмические приемники, при этом гидроакустические антенны сейсмических приемников включают четыре приемопередатчика акустических сигналов, установленных на перфорированном кронштейне, с формированием двух одноканальных и одного двухканального приемопередатчиков, с размещением антенн одноканальных приемопередатчиков на расстоянии 1000 мм друг от друга в торцевых зонах перфорированного кронштейна; двухканальный приемопередатчик сформирован из двух приемопередатчиков, отстоящих на расстоянии 50 мм друг от друга, один из которых размещен на расстоянии 200 мм от первого одноканального приемопередатчика, а второй одноканальный приемопередатчик расположен на расстоянии 800 мм от второго одноканального приемопередатчика, приемопередатчики расположены на перфорированном кронштейне с образованием двух измерительных баз, имеющих общий центр; приемники сейсмических колебаний размещают в шельфовой зоне, вдоль линии подножия континентального склона и вдоль оси, перпендикулярной линии Гардинера по границам разлома.
Посредством магнитометров и гравиметров, установленных на подводных станциях, выполняют магнитотеллурическую съемку. По результатам съемки, при обработке синхронных записей, используя алгоритмы, позволяющие получить на каждой частоте несколько независимых решений по импедансной и адмитансной оценкам, находят частотные характеристики, связывающие электрические и магнитные поля в полевых и базисном пунктах в целевом диапазоне периодов, а в узловых точках - в широком диапазоне периодов. Затем выполняют коррекцию исходных по частотных выборок t и m, рассчитывают и сравнивают погрешность параметров по всем выборкам и фиксируют выборки с минимальными погрешностями и соответствующими им текущими и средними значениями параметров. По этим средним значениям строят графики частотных характеристик t и m, графики по профилям и карты на фиксированных периодах внутри целевого диапазона. По текущим значениям t и m в частотных выборках с минимальными погрешностями рассчитывают текущие значения соответствующих параметров по формулам, на каждой частоте, находят их средние значения и частотные погрешности. По средним значениям параметров строят их частотные характеристики. Аналогично по текущим значениям импедансов и с учетом величины импеданса в базисном пункте получают кривые рт и другие трансформации импеданса также в вариантах нормирования на полное и внутреннее магнитное поле и их погрешности. Выбирают наиболее информативные периоды в целевом диапазоне и строят графики по профилям или карты указанных информативных параметров на всю исследованную площадь. Для более надежного выявления слабых аномалий t и m рассчитываются по соответствующим формулам интегральные их характеристики и также строятся их графики или карты на всю площадь и для отдельных участков площади.
По комплексу полученных данных с учетом погрешностей параметров и их доверительных интервалов (точности) построений судят о наличии, характере, размерах и глубине геоэлектрических неоднородностей в пределах целевого интервала геологического разреза с оценкой точности и достоверности их выявления.
При выполнении магнитотеллурической съемки также выполняют измерения соответствующих параметров гидросферы посредством датчика метана 63, блока контроля радиоактивного загрязнения 24, блока гидрохимических измерений 62, гидрофизического модуля 47.
При наличии геоэлектрических неоднородностей выполняют регистрацию гидроакустических сигналов с выделением фаз типа РР, S, и Т. При этом регистрируют сейсмические шумы на частотах 0,008-20 Гц, гидродинамический шум моря на частотах 0,01-100 Гц, давление волн цунами на дно на частотах 0,01-0,01 Гц и выполняют съемку грунта посредством пенетрометра 36.
Сигнал Т фазы, принятый в береговом клине, определяется в диапазоне частот 34…75 Гц при частоте квантования 160 Гц методом псевдодифференциального параболического уравнения, обеспечивающего выделение звуковых полей в двумерном неоднородном океане с переменными рельефом дна и профилем скорости звука с заданной точностью для любого диапазона углов скольжения локальных нормальных волн с учетом взаимодействия между ними. Так как наблюдаемый сигнал S(t) является суммой сигналов от последовательно возбуждаемых слоев, то, представляя сигнал в виде вектора столбца временных отсчетов и обозначая через si векторы-столбцы сигналов от последовательно возбуждаемых слоев, имеем S(S1, S2, …Sn), (a1, а2, …an), ai - суть амплитуды рассеивателей. В качестве решающей статистики используют сумму квадратов амплитуд, имеющую максимальное значение для сигнала ожидаемой структуры. Оценку получают методом наименьших квадратов, так как система линейных уравнений является неопределенной.
Выполняя оценку для каждого момента времени, получают ее временную зависимость. Присутствие в ней максимума означает наличие в источнике ожидаемой структуры возбуждения звукового поля. При построении графика решающей статистики абсцисса глобального максимума соответствует времени прихода совокупного рассеянного сигнала.
Приход акустической волны сейсмического происхождения определяют по величине сдвига частоты рассеянного излучения, при этом посредством средств регистрации, размещенных в ближней зоне от границ разлома на диспетчерских станциях приема и обработки сигналов, выполняют анализ низкочастотных составляющих рассеянного сигнала, а в качестве опорных квазигармонических высокочастотных сигналов используют шумы судоходства, а посредством средств регистрации, размещенных в прибрежной зоне, определяют момент появления и направление прихода сейсмоакустических волн путем узкополосной фильтрации и спектрального анализа. Выделение фаз типа РР, S и Т осуществляют путем узкополосной фильтрации посредством рекурсивных фильтров Баттерфорта, при этом входную фильтрацию осуществляют посредством рекурсивных фильтров с целочисленными коэффициентами, а сигналы с частотой дискретизации 100 Гц и ниже подвергают фильтрации с коэффициентами в виде чисел с плавающей запятой. Регистрацию гидроакустических сигналов осуществляют посредством широкополосных донных сейсмографов с не менее чем тремя сейсмическими каналами, при этом сигналы анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается при совпадении сигналов тревоги по крайней мере в двух каналах из трех. Спектральный анализ выполняют как объемных волн фаз РР и S, так и поверхностных волн Лява, Рэлея и Стоунли.
При регистрации сейсмических сигналов на дне одним из важных направлений использования широкополосных донных сейсмографов является исследование микросейсмических шумов, возбуждаемых морскими и океаническими волнами. Микросейсмы проявляются в широком диапазоне частот и служат естественным фоном, который определяет порог чувствительности сейсмографов. Посредством предлагаемого устройства также выполняется регистрация характерных микросейсм с периодом около 6 секунд, также выявляются микросейсмы с периодами 20 и 100 секунд, что позволяет выделить как объемные Р и S волны, так и поверхностные волны Лява (колебания в диапазоне частот 0,0125-0,05 Гц), Рэлея и Стоунли (1-10 Гц). На береговых станциях волну Рэлея регистрируют на нулевой моде.
Известные способы позволяют достичь технического результата, заключающегося в повышении достоверности, только в условиях изотропного поля, так как характер убывания интенсивности звукового сигнала по мере удаления от источника в горизонтально неоднородном поле (особенно в океане) резко отличается от той же зависимости в условиях изотропного поля. Мезомасштабные неоднородности океана (фронты, ринги) резко перестраивают звуковое поле, вызывая колебания интенсивности сигнала до 5 дБ при прогнозе дальности их действия (Д) до 10 км. Поэтому для эффективного прогноза гидроакустических условий в аномальных районах необходимо четкое установление центров и границ, а также определение параметров возмущающих образований. Неопределенность в расчете звукового поля по климатическим данным или опорному полю выражается в стандартных отклонениях реального уровня от опорного в 4-9 дБ, при Д=90 км, что соответствует погрешности в прогнозе ожидаемой дальности действия гидроакустических систем на 60-90%. Использование единственной кривой вертикального распределения скорости звука для акустических расчетов допустимо лишь на малых дистанциях (до 10 км), что крайне редко встречается в реальных условиях. По величине и направлению (знаку) горизонтального градиента вдоль трассы распространения сигнала можно судить о степени изменчивости интенсивности звукового поля на горизонте приема относительно фиксированного источника. Для расчетов акустического поля параметром является профиль скорости звука, точно совпадающий с фактическим профилем в месте расположения источника. Однако при использовании режимной информации среднеквадратический профиль, как правило, не совпадает с фактическим, что приводит к дополнительным случайным погрешностям в конечном результате.
В предлагаемом техническом решении посредством подводного зонда 14 определяют профиль скорости звука в объеме исследуемой гидросферы, а также выполняют рекогносцировку исследуемой подводной площади и геодезическую привязку подводных станций.
В качестве измерительных средств, установленных посредством якорных устройств, могут быть использованы акустические сейсмические датчики для регистрации акустических сигналов, протонные или квантовые вариометры и магнитометры для измерения электрической и магнитной компоненты естественного электромагнитного поля Земли, с выделением магнитотеллурической составляющей на фоне помех с разносом электрических и магнитных датчиков на величину Δr≤(0,013…0,025)r, (где r -расстояние между приемником и источником). При этом выделение магнитотеллурической составляющей на фоне помех существенно упрощается, так как помехи по электрическому и магнитному каналам вызваны различными источниками (являются некоррелированными) ввиду разноса датчиков на величину Δr. При этом магнитные составляющие естественного магнитного поля меньше, чем электрические, зависят от характера геоэлектрического разреза вдали от горизонтальных неоднородностей.
В конкретном исполнении акустические измерительные средства, установленные посредством якорных устройств, представляют собой комплект гидроакустических антенн.
Каждая приемная гидроакустическая антенна состоит из четырех гидрофонов. Секция антенны состоит из двух одноканальных и одного двухканального модуля, располагающихся на линейном несущем кронштейне. Расстояние между приемными гидрофонами двухканального модуля составляет 50 мм. Максимальное разнесение крайних приемников на кронштейне составляет 1000 мм. Кронштейн перфорирован, что позволяет располагать приемники в непосредственной близости друг от друга для проведения фазовой калибровки и с произвольным разнесением для проведения измерений направления прихода акустического сигнала. В качестве антенн приемников использованы пьезокерамические сферы диаметром 30 мм, внутри которых размещены предварительные усилители с коэффициентом усиления 30 дБ. Сферы размещаются на стальной пластине размером 145×145×10 мм, снабженной элементами крепления и акустической заглушкой с тыльной стороны. Коэффициент подавления звукового сигнала с тыльной стороны составляет не менее 30 дБ.
Антенный комплекс состоит из 8-канальной 2-секционной приемной гидроакустической антенны и гидроакустической излучающей антенны.
Каждая секция приемной антенны представляет собой 4-элементный неэквидистантный гидрофонный модуль, предназначенный для измерения проекции вектора прихода акустического сигнала на одну из горизонтальный осей в режиме ультракороткой базы, в пеленгационном режиме, либо для приема сигналов в режиме длинной базы на 4 рабочих частотах. Секции приемной антенны расположены в горизонтальной плоскости перпендикулярно друг к другу.
Таким образом, когда все гидрофоны производят прием на одной и той же рабочей частоте, реализуется режим определения задержки и направления прихода отклика от фиксированной точки грунта, в режиме ультракороткой базы, а когда каждый из гидрофонов настроен на свою рабочую частоту, осуществляется режим измерения задержек от нескольких точек грунта в режиме длинной базы.
Зарегистрированные сигналы подвергаются обработке для каждого конкретного момента времени для получения временной зависимости в границах, характеризующих уровни состояния естественного геофизического поля и гидрофизических полей.
Устройство управления диспетчерской станции (плавательного средства) анализирует уровень сигналов, поступающих по гидроакустическому каналу связи от датчиков слабых сейсмических сигналов, и в случае повышения порогового уровня включает датчики сильных движений и в случае существенных вертикальных или наклонных скоростей смещения элементов движения дна формирует пакет сообщений, который по каналу спутниковой радиосвязи передается на опорный пункт. Поскольку устройство управления работает с инерцией, то для исключения потери первых вступительных сильных движений дна сигналы с выходов датчиков слабых сигналов непрерывно регистрируют в буферную память, которые затем используются для определения элементов движения судна и регистрируются в цифровом многоканальном накопителе информации. При этом пороговый уровень определяется путем усреднения за длительный период времени сейсмических шумов, поступающих с выходов датчиков слабых сейсмических сигналов.
Принятые приемной антенной гидроакустического канала связи плавательного средства сигналы формируются в информационные пакеты для передачи на опорные пункты через искусственные спутники Земли или летательные аппараты, которые могут быть использованы в качестве средства ретрансляции. Аналогами алгоритма преобразования данных являются методы преобразования данных, описанные в источнике: Ильин А.А., Маринич А.Н. и др. Цифровые терминалы спутниковых систем связи. СПб. Deau. 2005, с.77-78, 89.
В качестве антенны спутниковой связи на плавательном средстве установлена антенна линейной поляризации в виде несимметричного полуволнового штыревого вибратора, обеспечивающая наилучшие энергетические характеристики в области малых углов места спутниковых аппаратов.
Гидроакустический канал связи обеспечивает дальность до 8000 м с диапазоном частот сигналов переносчиков команд 7-10 кГц.
При обработке сигналов в качестве решающей статистики используется сумма квадратов амплитуд, имеющая максимальное значение для сигнала ожидаемой структуры. Вычисления выполняются для каждого момента времени для получения временной зависимости для каждого поля. Присутствие в ней максимума означает наличие в источнике ожидаемой структуры возбуждения того или иного поля. Глобальный максимум соответствует времени прихода совокупного принятого сигнала. При достижении величины глобального максимума, равного среднему значению между амплитудами, характеризующими уровни состояния естественного геофизического и гидрофизического полей, судят о возможности наличия углеводородов в границах обследуемого пласта.
Выделение из спектра горизонтальных составляющих нечетных гармоник 0,003 и 0,005 Гц, а из спектра вертикальных составляющих четных гармоник 0,002, 0,004, 0,006 и 0,008 Гц с регистрацией уровня моря на береговых станциях позволяет исключить влияние микросейшевых составляющих, обусловленных в основном влиянием приливных колебаний.
Динамический шум моря определяется в диапазоне частот от 5 до 10 Гц посредством измерительного модуля, включающего последовательно соединенные гидрофон, предварительный усилитель, линию связи, широкополосный усилитель, анализатор спектра. Полученные сигналы о динамическом шуме моря подвергаются дискретизации и квантованию, а потом проходят спектральную обработку по алгоритму модифицированных периодограмм в следующей последовательности. Из последовательности сигналов Х2(m) длиной L отсчетов вычисляют для каждой последовательности Х2(m) коэффициенты быстрого преобразования Фурье

где W(m) - соответствующее окно.
Далее вычисляют периодограмму I2(fk)=1/V|X2(k)|, где fk(k/L) - частота дискретного преобразования Фурье,  - энергия окна.
- энергия окна.
Оценка энергетического спектра  выполняется как
выполняется как
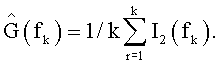
Динамический шум моря совпадает с частотой примерно на 5 дБ. Для решения такого рода задач необходимо непрерывную область акватории дискретизировать с помощью узлов регулярной сетки. Затем определяется граф путем задавания связи (ребра графа) на этой сетке. Возможные связи определяются путем специального индексирования узлов регулярной сетки с помощью дерева Фарея-Коши. При этом коэффициенты аппроксимации по флуктуационным полям выражаются аналитически через интегралы по фрагментам опорного поля в отдельных ячейках сетки.
Зарегистрированные сигналы, характеризующие вариации магнитного поля на частотах 0,01-1,0 Гц, магнитную индукцию электромагнитного поля на частотах 1-200 Гц, электрическую составляющую электромагнитного поля на частотах 1-500 Гц, акустические шумы на частотах 5-50000 Гц, сейсмические шумы на частотах 0,01-20 Гц, гидродинамический шум моря на частотах 0,01-100 Гц, в зонах тектонических разломов подвергаются обработке для каждого конкретного момента времени для получения временной зависимости в границах, характеризующих уровни состояния естественного геофизического поля и гидрофизического поля в период фазы нахождения солнца и луны на одной небесной линии, как геофизического поля, подверженного в данный период наибольшим максимальным возмущениям по всем составляющим геофизических и гидрофизических полей.
При обработке сигналов в качестве решающей статистики используется сумма квадратов амплитуд, имеющая максимальное значение для сигнала ожидаемой структуры. Вычисления выполняются для каждого момента времени для получения временной зависимости для каждого поля. Присутствие в ней максимума означает наличие в источнике ожидаемой структуры возбуждения того или иного поля. Глобальный максимум соответствует времени прихода совокупного принятого сигнала. При достижении величины глобального максимума, равного среднему значению между амплитудами, характеризующими уровни состояния естественного геофизического и гидрофизического полей и геофизического поля и гидрофизического поля в период фазы нахождения солнца и луны на одной небесной линии, путем исключения акустических сигналов природного и техногенного происхождения судят о возможности наличия месторождения углеводородов.
В предлагаемом способе реализована технология построения картографического изображения на основе NURBS в виде итерационной экспертной автоматизированной процедуры. В качестве языка программирования использован язык MatLab. В этой системе качество построения карты определяется путем экспертного сравнения положения изолиний, вычисленных по NURBS, с положением соответствующих изогипс (изобат) на исходной карте.
В конкретной реализации предлагаемого способа источником информации о рельефе дна служат растровые карты.
В общем случае при аппроксимации профиля рельефа одномерными сплайнами следует задавать значения двух первых производных в конечных точках разреза. Однако такая информация неизвестна, и получить ее на практике нельзя. Поэтому в качестве базового сплайна для аппроксимации профиля рельефа по разрезу использован простейший кубический сплайн с нулевыми граничными производными. Ввиду того, что не существует никаких явно заданных двумерных сплайнов, так как нельзя построить бесконечную систему алгебраических уравнений для согласования двух первых производных по всем направлениям на смежных границах двух кусков сплайновой поверхности, то построение двумерной сплайн-функции производится с использованием тензорного произведения одномерных сплайнов. Согласование первых двух дифференциалов для смежных прямоугольных участков карты обеспечивается перекрытием областей задания смежных NURBS.
Таким образом, технология построения карт в аналитическом виде на основе NURBS позволяет исключить этап триангуляции и тем самым исключить недостатки существующих технологий, применяемых в известных технических решениях. Предлагаемая реализация технологии может быть адаптирована к другим типам исходной информации, и в нее могут быть включены более сложные типы базовых сплайнов.
Построение карты амплитудных вариаций микросейсмического сигнала для каждой частоты спектра пространственных вариаций, а также привязку каждой полученной карты соответствующей ей глубине выполняют путем аппроксимации профиля рельефа по разрезу относительно береговой линии, а в качестве базового сплайна используют кубический сплайн с нулевыми граничными производными, при этом построение двумерной сплайн-функции производится путем тензорного произведения одномерных сплайнов. При этом правомерность выявления месторождений углеводородов осуществляется путем выявления основных географических закономерностей размещения геофизических полей в пределах исследуемого региона. Поскольку многие шельфы представляют собой продолжение низменностей, приуроченных к крупным платформенным прогибам или синеклизам, то толщи, выполняющие эти прогибы, наклонены в сторону шельфа и достигают максимальной мощности именно в его пределах. Большая мощность терригенных осадков в нефтегазоносных районах является условием, благоприятствующим нефтегазоносности.
Для подтверждения полученных результатов исследований в границах разреза, в частности для подтверждения появления спектральной аномалии информационного сигнала, выполняют генерирование сейсмических колебаний посредством устройства для возбуждения упругих колебаний в морской среде 38 на фоне естественного сейсмического поля в районе исследований.
В период тестовых испытаний, применительно для выявления землетрясений, измерения выполнялись посредством датчиков слабых сейсмических сигналов (сейсмический модуль 52), измеряющих три компоненты (горизонтальная, вертикальная и наклонная составляющие) в диапазоне 0,008-0,1 Гц и датчиков сильных движений дна (сейсмоакустических модуль 53) в диапазоне 0,01-20 Гц, измеряющих также три компоненты, регистрировались сигналы на границе раздела морская вода - морской грунт.
В качестве измерительных датчиков также использовались протонные и квантовые вариометры и магнитометры для измерения электрической и магнитной компоненты естественного электромагнитного поля земли с выделением магнитотеллурической составляющей на фоне помех с разносом электрических и магнитных датчиков на величину Δr≤(0,013…0,025)r, (где r - расстояние между приемником и источником). При этом выделение магнитотеллурической составляющей на фоне помех существенно упрощается, так как помехи по электрическому и магнитному каналам вызваны различными источниками (являются некоррелированными) ввиду разноса датчиков на величину Δr. При этом магнитные составляющие естественного магнитного поля меньше, чем электрические, зависят от характера геоэлектрического разреза вдали от горизонтальных неоднородностей.
Зарегистрированные сигналы, подвергались обработке для каждого конкретного момента времени для получения временной зависимости в границах, характеризующих уровни состояния естественного геофизического поля и гидрофизических полей.
Блок управления и регистрации 27 анализировал уровень сигналов, поступающих от сейсмоакустического модуля 53, и в случае повышения порогового уровня включал сейсмический модуль 52 и в случае существенных вертикальных или наклонных скоростей смещения элементов движения дна формировал пакет сообщений, который по гидроакустическому каналу связи передавался на диспетчерскую станцию.
Поскольку блок управления и регистрации 27 работал с инерцией, то для исключения потери первых вступительных сильных движений дна сигналы с выходов датчиков сейсмического модуля 52 сигналы непрерывно регистрировались в буферную память блока управления и регистрации 27, которые затем использовались для определения элементов движения дна и регистрировались в цифровом многоканальном накопителе информации блока управления и регистрации 27. При этом пороговый уровень определялся путем усреднения за длительный период времени сейсмических шумов, поступающих с выходов датчиков сейсмического модуля 52.
Гидроакустический канал связи обеспечивал дальность до 8000 м с диапазоном частот сигналов переносчиков команд 7-10 кГц.
При обработке сигналов в качестве решающей статистики использовалась сумма квадратов амплитуд, имеющая максимальное значение для сигнала ожидаемой структуры. Вычисления выполнялись для каждого момента времени для получения временной зависимости для каждого поля. Присутствие в ней максимума означает наличие в источнике ожидаемой структуры возбуждения того или иного поля. Глобальный максимум соответствует времени прихода совокупного принятого сигнала. При достижении величины глобального максимума, равного среднему значению между амплитудами, характеризующими уровни состояния естественного геофизического и гидрофизического полей, судят о возможности наступления катастрофического явления.
Выделение из спектра горизонтальных составляющих нечетных гармоник 0,003 и 0,005 Гц, а из спектра вертикальных составляющих четных гармоник 0,002, 0,004, 0,006 и 0,008 Гц с регистрацией уровня моря на береговых станциях позволяет исключить влияние микросейшивых составляющих, обусловленных в основном влиянием приливных колебаний.
Предлагаемое техническое решение может быть использовано для решения следующих задач:
• изучения строения земной коры в акваториях Мирового океана;
• исследования совокупности проявления геофизических полей в зонах тектонических разломов непосредственно на дне океана;
• исследования состояния морской среды в придонной зоне и ее взаимодействие с тектоническими процессами;
• геофизического и геоэкологического мониторинга сложных гидротехнических сооружений;
• оперативной оценки сейсмического и гидродинамического состояния районов и прогноза возможных сейсмических и экологических последствий;
• раннего оповещения с существенным повышением точности прогноза землетрясений и цунами;
• выявления предвестников сейсмических, геодеформационных, геохимических, гидрофизических предвестников катастрофических землетрясений, очаги которых находятся под дном океана, осуществление среднесрочного и краткосрочного прогноза землетрясений с магнитудой 5,5 и выше;
• контроля изменений напряженно-деформированного состояния участков земной коры шельфовых зон вблизи разрабатываемых месторождений нефти и газа, вызванных извлечением углеводородов, законтурной закачкой воды и другими искусственными воздействиями на углеводородный пласт;
• выбора экологически безопасных режимов эксплуатации месторождений;
• прогноза развития деформаций земной коры и наведенной сейсмичности;
• прогноза небольших местных землетрясений, опасных повреждением скважин, нефтяных платформ/подводных трубопроводов.
• исследования месторождений морских газогидратов.
Применение предлагаемого технического решения позволяет выполнить контроль изменений напряженно-деформированного состояния участков земной коры шельфовых зон вблизи разрабатываемых месторождений нефти и газа, вызванных извлечением углеводородов, законтурной закачкой воды и другими искусственными воздействиями на углеводородный пласт, прогнозировать небольшие местные землетрясения, опасные повреждением скважин, нефтяных платформ/подводных трубопроводов, прогнозировать аварийные ситуации, тем самым способствовать снижению экологической опасности при эксплуатации морских промышленных объектов.
Реализация устройства технической сложности не представляет, так как устройство реализовано на серийно выпускаемых датчиках и элементах микроэлектроники, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "промышленная применимость".
Источники информации
1. Патент RU №2045079.
2. Патент RU №2161809.
3. Авторское свидетельство SU №949574.
4. Патент RU №2054697.
5. Патент WO №98/37439.
6. Патент RU №2251716.
7. Патент RU №2336541.
8. Патент RU №2271554.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЙСМИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ ПОИСКА И РАЗВЕДКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2010 |
|
RU2432588C1 |
| СПОСОБ СЕЙСМИЧЕСКОГО МИКРОРАЙОНИРОВАНИЯ | 2010 |
|
RU2436125C1 |
| ПОДВОДНАЯ ГЕОФИЗИЧЕСКАЯ СТАНЦИЯ | 2010 |
|
RU2435180C1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436118C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2449325C1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ НА АКВАТОРИИ МОРЯ ПРИ ПОИСКЕ ПОДВОДНЫХ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2010 |
|
RU2434250C1 |
| ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ГЕОРАЗВЕДКИ | 2010 |
|
RU2436132C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
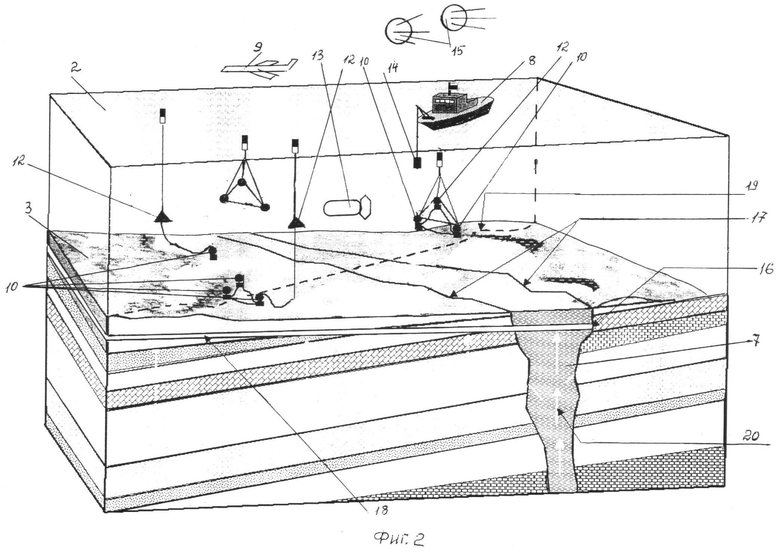
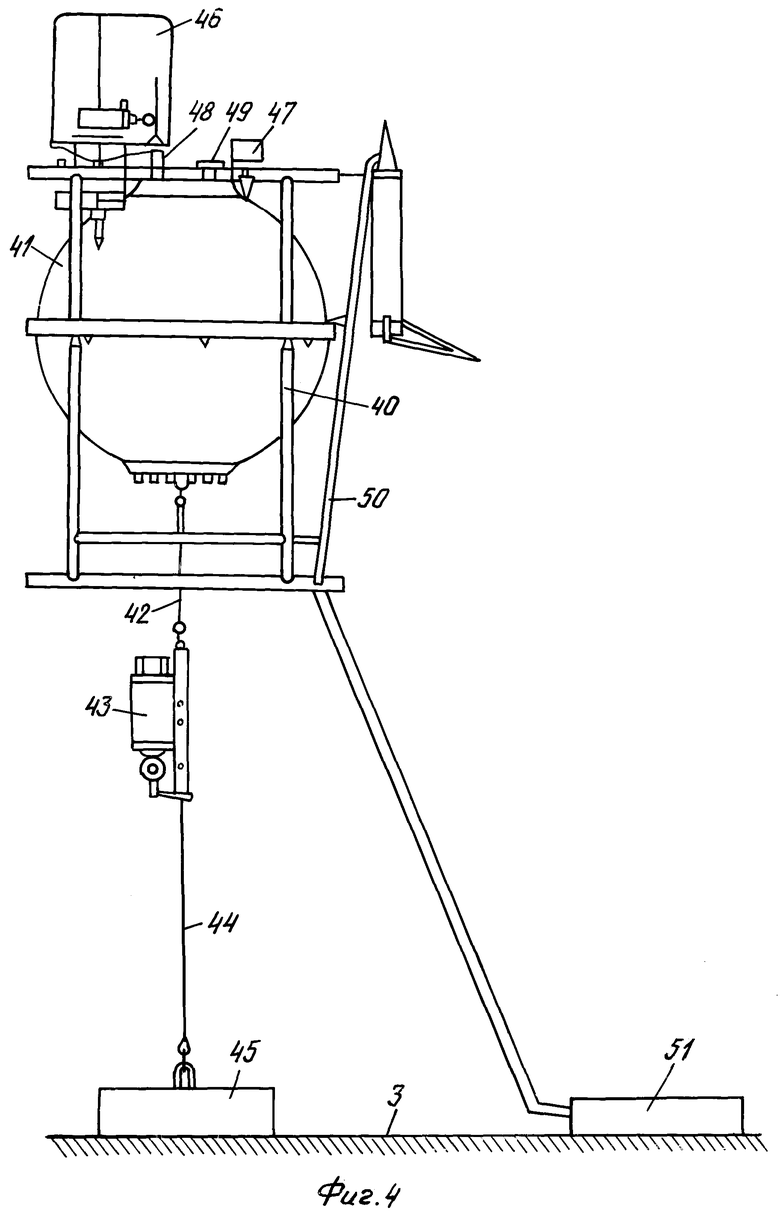
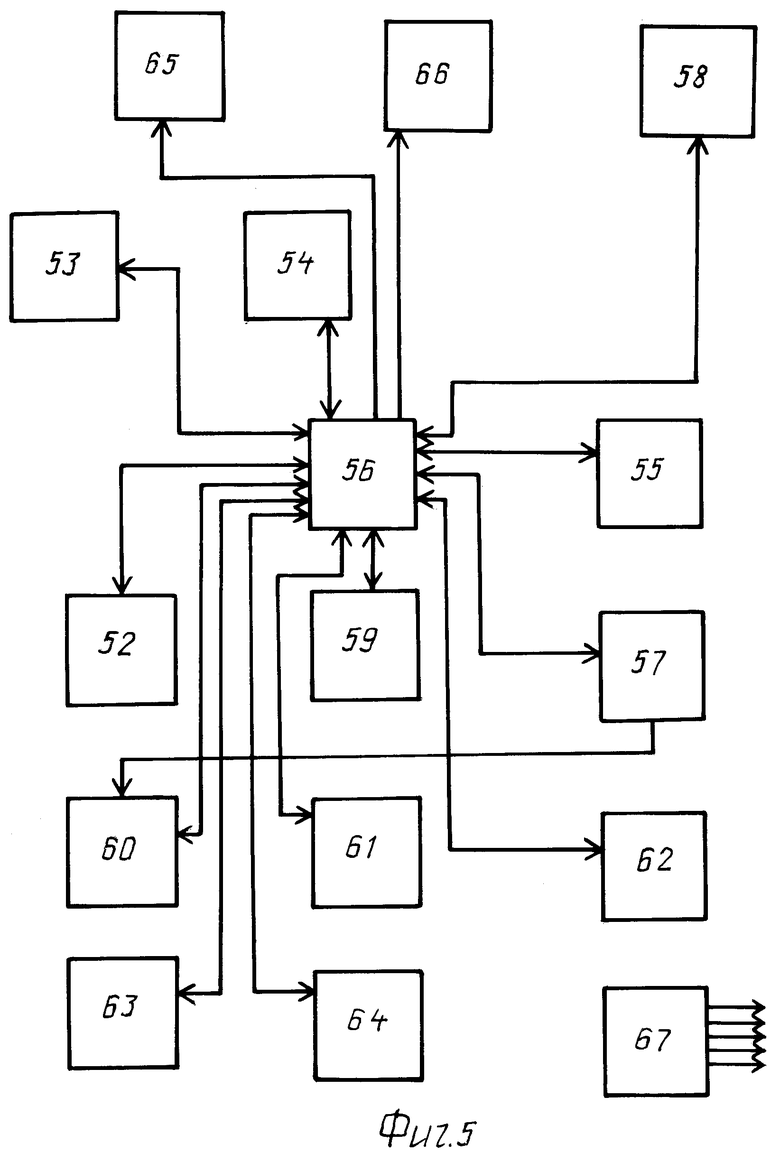
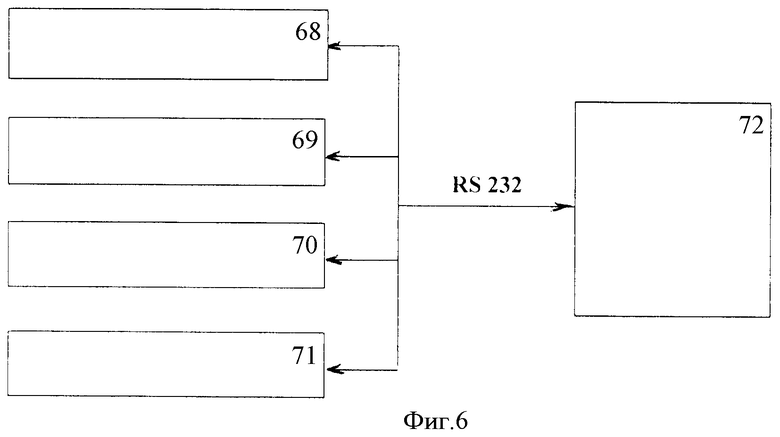

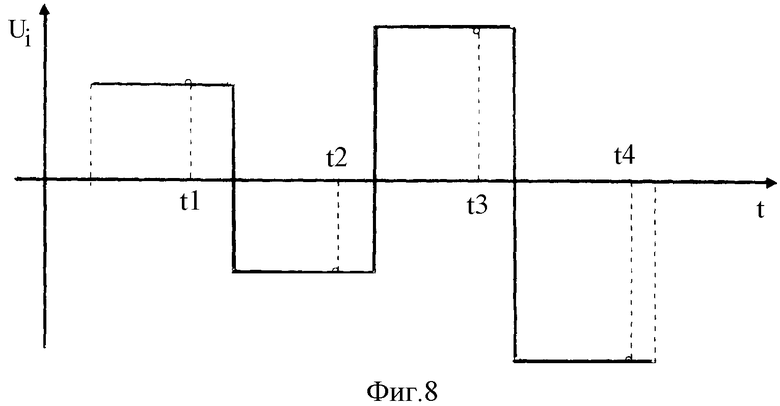
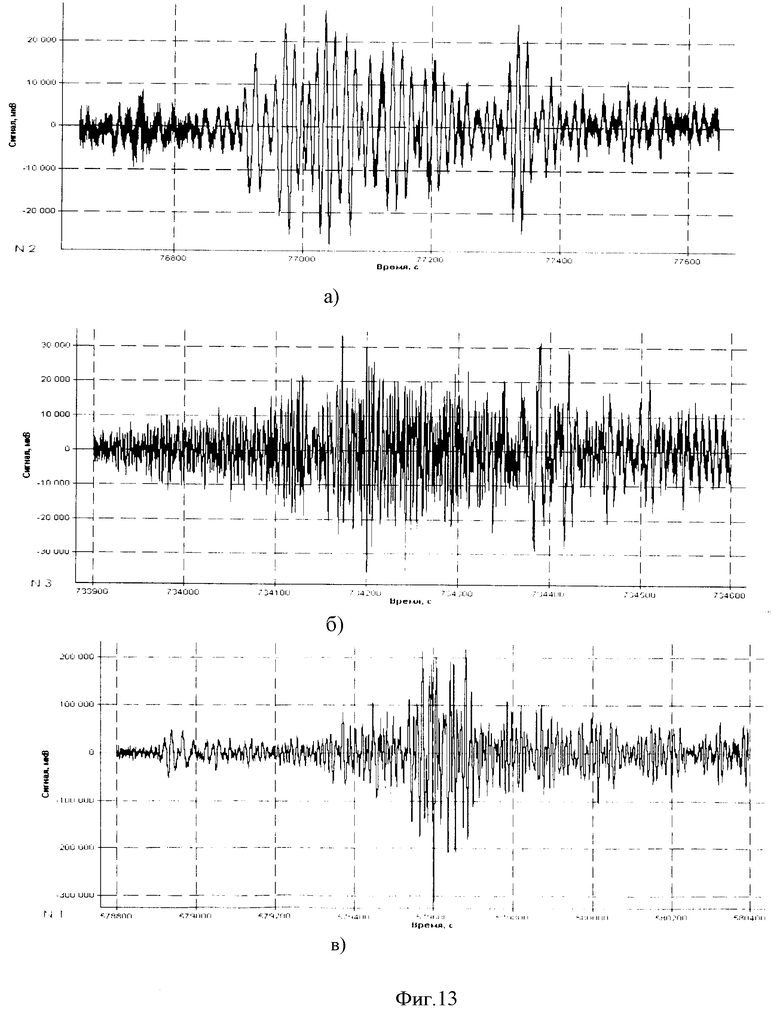
Изобретение относится к области сейсмических исследований и может быть применено при поиске залежей углеводородов на суше и на континентальном шельфе. В предлагаемом техническом решении определение дисперсионной кривой микросейсмических волн, характерной для исследуемой территории, осуществляют путем проведения синхронной регистрации микросейсмических сигналов не менее чем тремя сейсмостанциями, выполняют путем регистрации сейсмических шумов на частотах 0,008-20 Гц на границе вода-грунт, при этом выделяют из спектра горизонтальных составляющих нечетные гармоники 0,003 и 0,005 Гц, а из спектра вертикальной составляющей выделяют четные гармоники 0,002, 0,004, 0,006 и 0,008 Гц, при этом дополнительно измеряют вариации магнитного поля на частотах 0,01-1,0 Гц, магнитную индукцию электромагнитного поля на частотах 1-200 Гц, электрическую составляющую электромагнитного поля на частотах 1-500 Гц, акустические шумы на частотах 5-50000 Гц, гидродинамический шум моря на частотах 0,01-100 Гц в зонах тектонических разломов, по измеренным параметрам выполняют факторный анализ на уровнях естественного геофизического фона и геофизического фона, путем построения графика амплитуд градиентов сейсмических, геодеформационных, геохимических, гидрофизических показателей при базе измерений, не превышающей 50-100 километров в средних широтах и 8-10 километров в высоких и экваториальных широтах соответственно, при этом учитывают короткопериодные вариации магнитного поля, вызванные морским волнением, минимизируют ошибки магнитной съемки, путем выявления тонкой структуры магнитных неоднородностей и определения их параметров, приход акустической волны сейсмического происхождения определяют по величине сдвига частоты рассеянного излучения, при этом посредством устройств регистрации, размещенных на удалении от прибрежной зоны, выполняют анализ низкочастотных составляющих рассеянного сигнала, используя в качестве опорных квазигармонических высокочастотных сигналов шумы судоходства, а посредством устройств регистрации, размещенных в прибрежной зоне, определяют момент появления и направление прихода сейсмических волн путем узкополосной фильтрации и спектрального анализа волн посредством рекурсивных фильтров Баттерфорта, при этом входную фильтрацию осуществляют посредством рекурсивных фильтров с целочисленными коэффициентами, а сигналы с частотой дискретизации 100 Гц и ниже подвергают фильтрации с коэффициентами в виде чисел с плавающей запятой; регистрацию гидроакустических сигналов осуществляют посредством широкополосных донных сейсмографов с не менее чем тремя сейсмическими каналами, при этом сигналы анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается при совпадении сигналов по крайней мере в двух каналах из трех; спектральный анализ выполняют как объемных волн фаз РР и S, так и поверхностных волн Лява, Релея и Стоунли, построение карты амплитудных вариаций микросейсмического сигнала для каждой частоты спектра пространственных вариаций, а также привязку каждой полученной карты соответствующей ей глубине выполняют путем аппроксимации профиля рельефа по разрезу относительно береговой линии, а в качестве базового сплайна используют кубический сплайн с нулевыми граничными производными, при этом построение двумерной сплайн-функции производится путем тензорного произведения одномерных сплайнов; измерительную базу на морском дне формируют путем размещения сейсмических приемников на расстоянии не более 5 км друг от друга, с образованием равнобедренного треугольника в подводном пространстве, в вершинах которого размещены сейсмические приемники, при этом приемники сейсмических колебаний размещают в шельфовой зоне, вдоль линии подножия континентального склона и вдоль оси, перпендикулярной линии Гардинера по границам разлома, выявление локальных структур, перспективных в нефтегазоносном отношении, выполняют путем сейсмического профилирования посредством мобильной сейсмической станции с многократным перекрытием отражающих границ. Сейсмический комплекс для сейсмической разведки, состоящий из стационарных сейсмических приемников и мобильного многоканального сейсмометрического модуля, каждый из которых состоит из блока высокочувствительных сейсмических датчиков, регистрирующего модуля с блоком фильтров и усилителей, платы аналого-цифровых преобразователей, цифроаналоговых преобразователей, компьютера, GPS-приемника, блока питания, блока калибровки, блока обработки, анализа сигналов и их спектральных характеристик, программных средств типа Mathlab версии 6.0 и выше, отличающийся тем, что сейсмический комплекс включает плавательное средство, летательный аппарат, автономную сейсмическую донную станцию, придонную сейсмическую станцию, поплавковую сейсмическую станцию, при этом мобильный сейсмический модуль выполнен в виде управляемого подводного аппарата, плавательное средство снабжено подводным зондом, регистрирующая аппаратура сейсмического комплекса дополнительно содержит датчик обнаружения метана, гидрофизический модуль, донный сейсмометр, датчик магнитного поля с блоком управления, пенетрометр, гравиметр, пневматический излучатель, донный датчик давления, модем гидроакустического канала связи, модем спутникового канала связи, блок пространственной ориентации, акустический доплеровский измеритель профиля течений, блок гидрохимических измерений. Технический результат, который будет достигаться после реализации заявленного решения, заключается в повышении достоверности сейсмических исследований при поиске и разведке месторождений углеводородов. 2 н.п. ф-лы, 13 ил.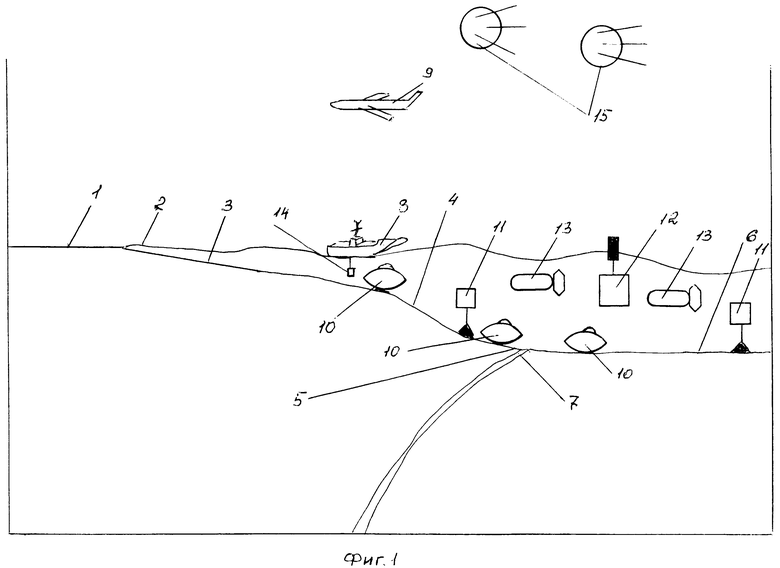
1. Способ сейсмической разведки при поиске углеводородов на континентальном шельфе, включающий регистрацию естественного сейсмического фона и сейсмического сигнала на исследуемом пространстве, измеренных одним и более сейсмическими комплексами, с последующей математической обработкой измеренных значений, предварительное определение дисперсионной кривой микросейсмических волн, характерной для исследуемой территории, путем проведения синхронной регистрации микросейсмических сигналов не менее чем тремя сейсмостанциями с вертикальными сейсмическими датчиками с последующей оценкой по полученным данным зависимости кажущихся скоростей распространения микросейсмических волн от частоты сигнала, определение длин волн и частотного диапазона на основе анализа кажущихся скоростей, в котором микросейсмический сигнал состоит из волн Рэлея, размещение сейсмических датчиков на исследуемой территории таким образом, чтобы расстояние между ними составляло не более половины самой короткой длины волны Рэлея, определение амплитудной не идентичности измерительных каналов сейсмических датчиков в полосе частот микросейсмического сигнала путем одновременной регистрации микросейсмического сигнала всеми сейсмическими датчиками в одной точке в течение времени, достаточного для установления стационарности спектра мощности микросейсмического сигнала, с последующим определением логарифмической разности спектров всех измерительных каналов сейсмических датчиков, накопление спектра мощности микросейсмического сигнала в каждой точке измерений в течение времени, достаточного для установления стационарности спектра, расчет спектра пространственных вариаций микросейсмического сигнала для каждой точки измерений путем определения логарифмической разности спектра мощности для каждой точки измерений и спектра мощности микросейсмического сигнала, накопленного на сейсмостанции, установленной стационарно, в течение эквивалентного времени в тот же временной период с учетом амплитудной не идентичности измерительных каналов сейсмических датчиков, построение карты амплитудных вариаций микросейсмического сигнала для каждой частоты спектра пространственных вариаций, привязку каждой полученной карты соответствующей ей глубине; при этом выполняют регистрацию информационных сигналов по их измеряемым компонентам в течение промежутка времени, достаточного для записи статистически достоверного шумового сигнала в инфранизкочастотном диапазоне, осуществляют расчет спектральных характеристик с использованием Фурье-преобразования полученных сигналов, их анализ на наличие ложных сигналов и сигналов от продуктивного пласта с природными углеводородами, исключают из рассмотрения ложные сигналы, выполняют анализ оставшихся сигналов с вынесением суждения о наличии или отсутствии углеводородов, регистрацию и запись проводят по вертикальным компонентам информационных сигналов в диапазоне частот 0,5-50 Гц, соответствующем диапазону глубин залегания фундамента, Фурье-преобразование компонентов информационных сигналов проводят по их первой производной, на полученных спектрах выявляют максимум, который принимают за соответствующий резонансу между дневной поверхностью и фундаментом ложный сигнал - сигнал от фундамента, бесперспективной точкой наблюдения признают точку со спектром, в котором присутствует сигнал от фундамента с монотонным спадом амплитуды спектра в сторону больших частот от максимума сигнала от фундамента, точку наблюдения, в спектрах сигналов которой присутствуют максимумы на частотах, больших частоты максимума сигнала от фундамента, со смещением их относительно других измерений менее чем на половину ширины своего максимума, принимают как перспективную на наличие залежей от природных углеводородов, о наличии залежи углеводородов судят по изменению спектральной мощности информационного сигнала на измеренных частотах, отличающийся тем, что определение дисперсионной кривой микросейсмических волн, характерной для исследуемой территории, осуществляют путем проведения синхронной регистрации микросейсмических сигналов не менее чем тремя сейсмостанциями, при этом регистрируют сейсмические шумы на частотах 0,008-20 Гц на границе вода-грунт, при этом выделяют из спектра горизонтальных составляющих нечетные гармоники 0,003 и 0,005 Гц, а из спектра вертикальной составляющей выделяют четные гармоники 0,002, 0,004, 0,006 и 0,008 Гц, при этом дополнительно измеряют вариации магнитного поля на частотах 0,01-1,0 Гц, магнитную индукцию электромагнитного поля на частотах 1-200 Гц, электрическую составляющую электромагнитного поля на частотах 1-500 Гц, акустические шумы на частотах 5-50000 Гц, гидродинамический шум моря на частотах 0,01-100 Гц в зонах тектонических разломов, по измеренным параметрам выполняют факторный анализ на уровнях естественного геофизического фона и геофизического фона путем построения графика амплитуд градиентов сейсмических, геодеформационных, геохимических, гидрофизических показателей при базе измерений, не превышающей 50-100 км в средних широтах и 8-10 км в высоких и экваториальных широтах соответственно, при этом учитывают короткопериодные вариации магнитного поля, вызванные морским волнением, минимизируют ошибки магнитной съемки путем выявления тонкой структуры магнитных неоднородностей и определения их параметров, приход акустической волны сейсмического происхождения определяют по величине сдвига частоты рассеянного излучения, при этом посредством устройств регистрации, размещенных на удалении от прибрежной зоны, выполняют анализ низкочастотных составляющих рассеянного сигнала, используя в качестве опорных квазигармонических высокочастотных сигналов шумы судоходства, а посредством устройств регистрации, размещенных в прибрежной зоне, определяют момент появления и направление прихода сейсмических волн путем узкополосной фильтрации и спектрального анализа волн посредством рекурсивных фильтров Баттерфорта, при этом входную фильтрацию осуществляют посредством рекурсивных фильтров с целочисленными коэффициентами, а сигналы с частотой дискретизации 100 Гц и ниже подвергают фильтрации с коэффициентами в виде чисел с плавающей запятой; регистрацию гидроакустических сигналов осуществляют посредством широкополосных донных сейсмографов с не менее чем тремя сейсмическими каналами, при этом сигналы анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается при совпадении сигналов по крайней мере в двух каналах из трех; спектральный анализ выполняют как объемных волн фаз РР и S, так и поверхностных волн Лява, Релея и Стоунли, построение карты амплитудных вариаций микросейсмического сигнала для каждой частоты спектра пространственных вариаций, а также привязку каждой полученной карты соответствующей ей глубине выполняют путем аппроксимации профиля рельефа по разрезу относительно береговой линии, а в качестве базового сплайна используют кубический сплайн с нулевыми граничными производными, при этом построение двумерной сплайн-функции производится путем тензорного произведения одномерных сплайнов; измерительную базу на морском дне формируют путем размещения сейсмических приемников на расстоянии не более 5 км друг от друга с образованием равнобедренного треугольника в подводном пространстве, в вершинах которого размещены сейсмические приемники, при этом приемники сейсмических колебаний размещают в шельфовой зоне вдоль линии подножия континентального склона и вдоль оси перпендикулярной линии Гардинера по границам разлома.
2. Сейсмический комплекс для сейсмической разведки при поиске углеводородов на континентальном шельфе, состоящий из стационарных сейсмических приемников и мобильного многоканального сейсмометрического модуля, каждый из которых состоит из блока высокочувствительных сейсмических датчиков, регистрирующего модуля с блоком фильтров и усилителей, платы аналого-цифровых преобразователей, цифроаналоговых преобразователей, компьютера, GPS-приемника, блока питания, блока калибровки, блока обработки, анализа сигналов и их спектральных характеристик, программных средств типа Mathlab версии 6.0 и выше, отличающийся тем, что сейсмический комплекс включает плавательное средство, летательный аппарат, автономную сейсмическую донную станцию, придонную сейсмическую станцию, поплавковую сейсмическую станцию, при этом мобильный сейсмический модуль выполнен в виде управляемого подводного аппарата, плавательное средство снабжено подводным зондом, регистрирующая аппаратура сейсмического комплекса дополнительно содержит спектроанализатор, датчик обнаружения метана, гидрофизический модуль, донный сейсмометр, датчик магнитного поля с блоком управления, пенетрометр, гравиметр, пневматический излучатель, донный датчик давления, модем гидроакустического канала связи, модем спутникового канала связи, блок пространственной ориентации, акустический доплеровский измеритель профиля течений, блок гидрохимических измерений информационно соединенных с блоком регистрации и управления.
| СПОСОБ ВИБРОСЕЙСМОРАЗВЕДКИ ПРИ ПОИСКЕ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 1992 |
|
RU2045079C1 |
| СПОСОБ ПОИСКА УГЛЕВОДОРОДОВ (ВАРИАНТЫ), КОНТРОЛЯ ЭКСПЛУАТАЦИИ УГЛЕВОДОРОДНОЙ ЗАЛЕЖИ | 1998 |
|
RU2161809C2 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| СПОСОБ СЕЙСМОРАЗВЕДКИ ПРИ ПОИСКАХ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 1992 |
|
RU2054697C1 |

