Изобретение относится к области геофизики, а более конкретно: к устройствам измерения геофизических параметров в придонной зоне морей и океанов, и может быть использовано для оперативной оценки сейсмического и гидродинамического состояния районов и прогноза возможных сейсмических и экологических последствий природного и техногенного характера, а также поиска подводных месторождений углеводородов.
Известные автономные донные станции [1-3] представляют собой цилиндрические или шарообразные корпуса, снабженные балластом для установки их на грунт, внутри и на корпусе которых установлены измерительные датчики и средства обработки первичной информации. В качестве измерительных датчиков используются, как правило, гидрофоны и геофоны. Зарегистрированная датчиками информация хранится на флеш-картах, которые после подъема донных станций обрабатываются на диспетчерских пунктах или считываются по каналам гидроакустической связи. Известные донные станции предназначены в основном для регистрации сейсмических сигналов на акватории моря. Так, устройство [3] представляет собой морскую автономную донную сейсмическую станцию, устанавливаемую на морское дно преимущественно с плавучих средств. Станция включает герметичный корпус, состоящий из двух полусфер, снабженных в месте сочленения уплотнительным кольцом. Внутри корпуса станции размещена геофизическая аппаратура, включающая измерительные датчики геофонного и гидрофонного типов, модули приема, регистрации, преобразования и хранения зарегистрированных сигналов, блоки сопряжения с бортовым модулем при всплытии, спутниковый и гидроакустический каналы связи, блок ориентации, блок синхронизации, блок управления размыкателем и блок питания. На внешней поверхности корпуса установлены гидроакустическая и спутниковая антенны, средства для поиска донной станции при всплытии, такелажные элементы и разъемы, устройство постановки на дно и обеспечения всплытия донной станции, выполненное в виде якоря-балласта.
Однако известные автономные донные станции измерения сейсмологических и гидроакустических сигналов на морском дне работают в непрерывном режиме регистрации и имеют ограниченный срок работы по причине недостаточного объема памяти и недостаточного заряда источника питания.
Известны также автономные донные станции [4-8], включающие донный сейсмометр, гидрофизический модуль, датчик магнитного поля, блок оптических измерений, средства первичной обработки и хранения информации, средства связи с диспетчерской станцией, установленные на платформе, в которых для увеличения срока работы на дне регистрация производится в старт-стопном (ждущем) режиме накопления информации. Управление накопителем производится от специального устройства, в котором непрерывно определяется средний уровень сейсмического фона за большой промежуток времени и одновременно за малый промежуток, соизмеримый со средней длительностью сигналов землетрясений. Отношение этих уровней используется как пороговое значение для включения накопителя. Поскольку такое управляющее устройство имеет инерцию, то для исключения потери начальной части сигнала применяется буферная память ограниченного объема. В случае превышения порогового значения сигнал переписывается из буфера в накопитель.
Однако такая система реагирует только на землетрясения определенной продолжительности и интенсивности. В то же время длительность сигналов землетрясений может составлять от единиц секунд (местные слабые) до единиц часов (сильные удаленные), а их интенсивность может меняться на несколько порядков. Помимо этого такая система сильно подвержена помехам, которые приводят к ложным записям. Например, периодические сигналы от пневматической пушки, используемой при сейсморазведке, или сигналы подводной гидроакустической связи, а также импульсные помехи биологического происхождения могут полностью заполнить накопитель и привести к преждевременной разрядке источника питания.
Также недостатком известных технических решений является то, что состав измерительных средств не позволяет решить задачу, связанную с исследованием состояния морской среды в придонной зоне при взаимодействии с тектоническими процессами, и задачу геофизического мониторинга сложных гидротехнических сооружений и поиска подводных месторождений углеводородов, что обусловлено рядом проблем, связанных с влиянием придонных течений на аппаратурные шумы, сцеплением сейсмических приемников с мягким дном, микросейсмическими шумами, генерируемыми гравитационными волнами, и особенностями распространения сейсмических сигналов в земной коре океанического типа.
Кроме того, такой существенный недостаток известных устройств, как недостаточный объем памяти накопителя информации (зарегистрированных сигналов), не позволяет в полном объеме реализовать определение корреляционных и спектральных функций случайных процессов в режиме непрерывной регистрации микросейсм.
Существенным недостатком известных технических решений также является ограничение по глубинам использования, что обусловлено ограничением по массогабаритным характеристикам, препятствующим самостоятельному всплытию станции на поверхность для снятия зарегистрированной информации и зарядке аккумуляторных батарей.
Задачей заявляемого технического решения является расширение функциональных возможностей подводных станций.
Поставленная задача решается за счет того, что в устройство, представляющее собой подводную геофизическую станцию, состоящую из герметичного корпуса сферической формы, стационарно установленного на раме, и содержащую средства регистрации геофизических сигналов, установленные внутри герметичного корпуса на шасси и включающие донный сейсмометр, гидрофизический модуль, средства хранения информации, датчик пространственной ориентации, установленный на карданном подвесе, балласт и размыкатель балласта, буй, дополнительно введен гравиметр, а также буйреп, соединенный с балластом, более того, герметичный корпус выполнен из высокопрочного алюминиевого сплава типа В95 с защитным антикоррозийным покрытием в виде анодного оксидированного сплава с многослойным лакокрасочным покрытием и имеет диаметр 450 мм, рама выполнена из алюминиевых труб, а донный сейсмометр установлен на подвижной платформе, соединенной с шасси карданным подвесом.
Новые отличительные признаки заключаются в том, что герметичный корпус выполнен из высокопрочного алюминиевого сплава типа В95 с защитным антикоррозийным покрытием в виде анодного оксидированного сплава с многослойным лакокрасочным покрытием, герметичный корпус выполнен диаметром 450 мм, рама выполнена из алюминиевых труб, донный сейсмометр установлен на подвижной платформе, соединенной с шасси карданным подвесом, подводная геофизическая станция снабжена буйрепом, который соединен с балластом, дополнительно введен гравиметр.
Совокупность отличительных признаков позволяет оперативно оценивать не только сейсмическое состояние исследуемых районов, но и гидродинамическое состояние на границе вода-грунт, обусловленное влиянием окружающей среды под воздействием процессов природного и техногенного характера, а также решать задачи поиска подводных месторождений углеводородов. Таким образом, совокупность новых отличительных признаков обеспечивает достижение технического результата, заключающегося в расширении функциональных возможностей известных устройств.
Сущность предлагаемого технического решения поясняется чертежом, где изображена блок-схема подводной геофизической станции, включающая герметичный корпус 1, выполненный в виде сферы и установленный на раме 2. В корпусе 1 на шасси 3 размещены: центральный микропроцессор 4, накопитель на жестком диске 5, гидроакустический канал связи 6, донный сейсмометр 7, гидрографический модуль 8, средства хранения информации 9, датчик пространственной ориентации 10, карданный подвес 11, подвижная платформа 12, гравиметр 13, балласт 14, размыкатель балласта 15 с таймером, разъем внешней связи 16, источник питания 17, буй 18, буйреп 19, аналоговые усилители 20, фильтры низкой частоты 21, цифровой регистратор 22, блок хранения точного времени 23. Герметичный корпус 1 снабжен верхним полюсным отверстием 24 для установки герметичного разъема 16. На раме 2 также установлен гидрофон 25.
Герметичный корпус 1 выполнен сферической формы диаметром 450 мм из высокопрочного алюминиевого сплава типа В95. Использование данного сплава позволяет изготовить прочный корпус минимального веса для работы на глубинах до 4000 м. Для защиты герметичного корпуса 1 от коррозии в морской воде применено комплексное защитное покрытие в виде анодного оксидирования с многослойным лакокрасочным покрытием. В верхнем полюсном отверстии герметичного корпуса 1 установлен разъем внешней связи 16 для считывания информации без разгерметизации корпуса 1.
Для установки подводной геофизической станции на морское дно герметичный корпус 1 оснащен рамой 2, выполненной из алюминиевых труб.
Рама 2 представляет собой металлическую конструкцию и является основанием подводной геофизической станции.
Ввиду того что масса подводной геофизической станции сравнительно велика и не позволяет ей самостоятельно всплыть на поверхность, для постановки и подъема на поверхность используется схема буйрепа 19 с балластом 14 и поверхностным или притопленным буем 18. Балласт 14 предотвращает передачу колебаний буйрепа 19 и рывков от буя 18 на корпус 1 подводной геофизической станции.
Гравиметр 13 построен по осесимметричной схеме, что позволяет исключить кросс-каплинг эффект, возникающий при донных течениях моря. Программное обеспечение технической реализации заявляемого способа позволяет использовать как морской гравиметр типа BGM-3, представляющий собой конструкцию принудительно уравновешенного акселерометра, в котором рабочая масса поддерживается в нулевом положении с помощью механизма обратной связи (струнный гравиметр), так и трехтензорный градиометр типа 3-DFTG.
Подвижная платформа 12 представляет собой двухосную гироплатформу с коррекцией от акселерометров, что обеспечивает возможность выполнения измерений при возмущающих ускорениях до 150 - 200 Гал, с динамической погрешностью при небольших возмущающих ускорениях менее 1 мГал. При этом погрешность стабилизации не превышает 1 минуту, углы прокачки составляют 30-40 градусов, что обеспечивает возможность выполнения измерений при возмущающих ускорениях до 150-200 Гал.
Источник питания 17 обеспечивает электропитание подводной геофизической станции. В качестве источников питания используются два никель-кадмиевых герметичных аккумулятора, позволяющих обеспечить большое количество постановок станции после подзарядки. Аккумуляторы расположены на подвижной платформе 12 в непосредственной близости от донного сейсмометра 7.
Постановка подводной геофизической станции с судна обеспечения производится с помощью буйрепа 19, заранее намотанного на барабан судовой лебедки. Сначала за борт судна спускается закрепленная на буйрепе 19 подводная геофизическая станция, затем через 50-100 м к буйрепу 19 прикрепляется балласт 14 и только после того, как они встанут на дно, сбрасывается прикрепленный к верхнему концу буйрепа 19 буй 18. При глубинах свыше 500 м более целесообразно использовать притопленный буй. В этом случае балласт 14 закрепляется на буйрепе 19 через гидроакустический размыкатель 15, а длина буйрепа 19 от балласта 14 до притопленного буя на 100-200 м меньше глубины в месте постановки подводной геофизической станции.
Подъем подводной геофизической станции на борт судна обеспечения производится в обратном порядке. Сначала выбирают на борт буй 18, буйреп 19 закрепляют на барабане судовой лебедки и производят подъем балласта 14 и стации.
В случае использования притопленного буя подъем осуществляется следующим образом. С судна обеспечения по гидроакустическому каналу связи 6 подается команда на размыкатель 15, балласт 14 отделяется и притопленный буй всплывает на поверхность, увлекая за собой подводную геофизическую станцию. Далее подъем на борт судна производится, как и в варианте с поверхностным буем.
Донный сейсмометр 7 обеспечивает преобразование сейсмических колебаний донной поверхности в электрические сигналы. В конкретной конструкции использован высокочувствительный вертикальный сейсмический датчик типа СМ3КВ. Для обеспечения высокой точности измерения требуется сохранение вертикальности измерительной оси датчика в пространстве при возможных наклонах корпуса 1. Для этого донный сейсмометр установлен на специальной утяжеленной подвижной платформе 12, соединенной с шасси 3 карданным подвесом 11, позволяющим донному сейсмометру занимать вертикальное положение при наклонах корпуса от 1 до 30 градусов. Кроме того, данная конструкция обеспечивает, при повороте кардана, постоянный контакт донного сейсмометра 7 с внутренней поверхностью корпуса 1, что значительно увеличивает точность измерений.
Донный сейсмометр 7 представляет собой трехкомпонентный сейсмоакустический датчик, предназначенный для преобразования третьей производной колебания грунта в электрический сигнал в соответствующем динамическом и частотном диапазонах. Основные технические характеристики датчика: количество сейсмоакустических каналов 3, частотный диапазон 20-1000 Гц, динамический диапазон в полосе 1/3 октавы и центральной частотой 30 Гц не менее 60 дБ, амплитуда выходного сигнала не более ±10 В, амплитуда контрольного сигнала при токе нагрузки 4 мА не более ±5 В.
Датчик пространственной ориентации 10 предназначен для определения точного положения в пространстве донного сейсмометра 7.
В качестве датчика пространственной ориентации 10 используется модуль электрического компаса ТСМ-2 фирмы "Precision Navigation", представляющий собой трехосный феррозондовый магнитометр и блок электроники, выполненные на одной плате.
Герметичный разъем 16 обеспечивает связь при подключении внешних судовых устройств при всплытии подводной геофизической станции.
Гидрофизический модуль 8 предназначен для выполнения измерений следующих величин:
- температуры,
- давления,
- электропроводимости,
- вектора скорости течения (трехосный акустический измеритель течений),
- солености,
- температуры.
Чувствительные датчики средств измерения гидрофизического модуля установлены непосредственно на раме 2.
Средства судна обеспечения включают в себя:
- персональный компьютер, совместимый с IBM PC;
- приемник спутниковой навигационной системы GPS;
- блок автономного гидроакустического размыкателя;
- аппаратуру гидроакустического телеуправления.
Минимальная конфигурация персонального компьютера включает:
-процессор - Pentium 166 МГц,
- ОЗУ - 32 Мбайт,
- плату SVGA с памятью 1 Мбайт,
- дополнительную плату с двумя последовательными портами с FIFO памятью (UAKT16550-совместимая).
Они используются для обработки информации, полученной с подводной геофизической станции.
Программно-математическое обеспечение средств судна обеспечения предназначено для проверки всех измерительных каналов подводной геофизической станции через последовательный порт RS-485, привязки к системе единого времени внутренних часов, осуществления привязки к географическим координатам посредством аппаратуры гидроакустического канала связи 6, получения информации по результатам тестовых проверок после установки подводной геофизической станции на дно.
Управляющий компьютер судна обеспечения и программно-математическое обеспечение реального времени предназначены для управления оборудованием подводной геофизической станции, диагностирования ее неисправностей, приема данных, получаемых с подводной геофизической станции, и размещения получаемых данных на устройствах накопления информации. Функционирование всего аппаратно-программного комплекса определяется файлом конфигурации, который создается специальной программой и задает наличие подводных геофизических станций, тип используемых геофизических каналов, параметры каналов, а также наличие или отсутствие аппаратуры синхронизации времени.
При запуске программы регистрации считывается конфигурация всей сети подводной геофизической станции и производится привязка времени по Гринвичу с точностью до нескольких десятков микросекунд и расчет поправок к частоте кварца компьютера для поддержания функционирования подводной геофизической станции. Вслед за синхронизацией происходит опрос, программирование, синхронизация и запуск оборудования отдельных подводных геофизических станций при использовании нескольких подводных геофизических станций в районе исследований. Запрашивается состояние оборудования каждой подводной геофизической станции (ее исправность, наличие каналов, исправность каналов и т.д.). В случае возникших проблем на экран выдается соответствующее сообщение (оно также записывается в файл протокола функционирования). На подводную геофизическую станцию передается программа работы для каждого измерительного канала, частота опроса и коэффициент усиления.
Перед запуском каждый удаленный цифровой регистратор синхронизируется по времени компьютера диспетчерской станции, а в дальнейшем синхронизация проводится каждые 10 сек. При синхронизации учитывается время прохождения сигнала от компьютера судна обеспечения до синхронизируемого блока регистрации. После этого блок регистрации запускается и начинает сбор данных с измерительных каналов. Блок регистрации в каждой подводной геофизической станции работает независимо и всю информацию сжимает и складывает в буферную память. Управляющий компьютер судна обеспечения циклически запрашивает у соответствующего блока регистрации данные о зарегистрированных датчиками сигналов и, в случае их наличия, принимает их и записывает в свои буфера в оперативной памяти. После накопления достаточного количества данных для канала они переписываются в файл, соответствующий типу канала. Обычно эти файлы расположены на другом компьютере и доступны по локальной сети, хотя для кратковременных экспериментов система может быть сконфигурирована таким образом, что будет использоваться локальный диск. При кратковременных разрывах связи (до 10 мин) данные не теряются в силу наличия у каждого блока регистрации достаточно большого собственного буфера. В процессе обмена данными оператором может быть проведена калибровка любого измерительного канала, входящего в состав сети судна обеспечения. При возникновении нештатных ситуаций (разрыв связи с подводной геофизической станцией, его поломка, отказ отдельных каналов либо восстановление вышеперечисленного), а также некоторых штатных ситуаций (возникновение события или запуск калибровки соответствующего измерительного канала) выдается сообщение на экран, включающее время по Гринвичу наступления ситуации, имена подводных геофизических станций и канала и само сообщение. Сообщения также записываются в буфер размером 100 строк и в файл протокола. Буфер может быть просмотрен оператором в любое время.
После постановки подводной геофизической станции на дно измерительные датчики функционируют по прямому назначению. Зарегистрированные датчиками сигналы записываются на средства хранения информации (накопитель на жестком диске 5), при сеансах связи передаются на судно обеспечения, где выполняется полный анализ оценки сейсмического и гидродинамического состояния исследуемых районов, по результатам которого делается прогноз о возможных сейсмических и экологических последствиях природного и техногенного характера. Зарегистрированные сейсмические сигналы и параметры гравитационного и магнитного поля используют для выявления подводных месторождений углеводородов в соответствии с известными методиками морфологического анализа (см. например [18]).
Сбор, оцифровка и накопление сигналов донного сейсмометра 7 осуществляется посредством программно-аппаратного комплекса для Intel-совместимого семейства процессоров, снабженного средствами отладки, тестирования и визуализации. Предусмотрены три режима регистрации сигналов: непрерывный, старт-стопный по заданной программе и старт-стопный с управлением по уровню сигнала. Управление параметрами системы производится по результатам экспресс-обработки сигналов на основе анализа уровня энергии и спектрального состава с помощью быстрых алгоритмов реального времени.
Аппаратная часть подсистемы сбора и регистрации данных состоит из следующих основных элементов: цифрового регистратора 22, блока хранения точного времени 23, кабельного канала связи, центрального микропроцессора 4 с накопителем на жестком магнитном диске 5.
Цифровой регистратор 22 представляет собой микромодульный контроллер на базе Intel-совместимого процессора NEC V25 с PCMCIA флэш-накопителем и стандартным выходным средством коммуникации на основе интерфейса RS232. Микроконтроллер содержит встроенный многоканальный АЦП с последовательным интерфейсом, программируемые таймеры, часы реального времени, порты цифрового ввода-вывода, внешние каналы аппаратного прерывания и канал прямого доступа к памяти. Отличительными особенностями используемого контроллера являются миниатюрные размеры (100×70×30 мм), малое потребление (0,5 Вт), высокая надежность и низкая стоимость.
Блок хранения точного времени 23 сконструирован с использованием энергосберегающих технологий, полностью на КМОП-элементах. Используется как генератор эталонных минутных (секундных) меток для синхронизации часов микроконтроллера центрального микропроцессора 4.
Центральный микропроцессор 4 станции собран на базе PC-совместимого оборудования для автоматизации промышленности с использованием процессорной платы типа MicroPC фирмы Octagon Sistems (США). Примененная конструкция промышленной электроники отвечает жестким требованиям промышленной эксплуатации, в частности способности выдерживать большие перегрузки при ударах, и имеет повышенную наработку на отказ. Сохранив вычислительную мощность современного персонального компьютера, он имеет малые габариты, вес и энергопотребление (несколько единиц ватт). При этом, что особенно важно для герметичной подводной геофизической станции, не требуется дополнительного охлаждения (вентилятора). Наличие 16-разрядного IDE интерфейса для накопителя на жестком магнитном диске 5 позволяет применять современные накопители повышенной емкости и соответственно увеличить время автономной работы подводной геофизической станции, используя режим непрерывной регистрации. Система регистрации в целом оказывается полностью совместимой с PC и работает под управлением ROM-DOS (DOS 6.22).
Для расширения динамического диапазона регистрируемых сигналов под каждую регистрируемую компоненту отводится два канала усиления: чувствительный и грубый, с соотношением коэффициентов усиления K1/K2=2n, где n выбирается из уровня реального сейсмического фона в месте установки подводной геофизической станции. Таким образом, удается довести динамический диапазон станции в условиях малых помех до 130 дБ с использованием недорогого и надежного 12-разрядного АЦП.
Служба точного времени реализована на основе периодической синхронизации внутренних часов микроконтроллера ПЦР эталонными минутными метками от блока хранения точного времени 23. Так как данные регистров часов реального времени микроконтроллера могут обновляться с некоторой задержкой, то для достижения требуемой точности службы времени используются секундные метки блока хранения точного времени 23 или смесь секундных и минутных меток, которые вводятся через один из цифровых входов микроконтроллера в такт с частотой преобразования аналогового сигнала и записываются в младший бит слова АЦП. Таким образом, оцифрованные данные содержат бит пилот-сигнала, фронт которого оказывается привязанным к фронту эталонной метки с точностью не хуже одного отсчета.
Основное время центральный микропроцессор 4 станции находится в режиме "Sleep" и включается только на время переписи данных с флэш-карты на жесткий диск и для выполнения контрольных функций по обслуживанию станции. Использование режима "Sleep" позволяет резко снизить энергетические затраты станции в целом.
Программное обеспечение подводной геофизической станции целиком написано на языке высокого уровня Си, который, вместе с тем, позволяет производить тонкое управление аппаратными средствами вплоть до побитовых операций в их регистрах, характерными для ассемблера. Применение компиляторов языка Си фирмы Borland позволяет путем соответствующей настройки среды компилятора генерировать коды, в значительной степени инвариантные к типу и классу используемого IBM-совместимого компьютера. В результате программа оказывается работоспособной для всех типов процессоров, начиная с семейства 8086/8088 и кончая 80486 и Pentium.
Версия программы размещается в EPROM микроконтроллера. Запуск программы на исполнение и, соответственно, начало работы происходит автоматически при подаче питания на микроконтроллер.
Оцифровка сейсмических сигналов происходит с использованием механизма внешних прерываний сигналами программируемого внутреннего таймера микроконтроллера. Оцифровка и сбор данных осуществляются с элементами предварительной обработки для улучшения метрологических характеристик каналов регистрации. Аналоговые сигналы цифруются на более высокой частоте, затем подвергаются цифровой фильтрации и осреднению "тройками" и "пятерками" с последующей разрядкой до получения требуемой частоты выборок. Все процедуры фильтрации в системе выполняются в реальном времени с помощью быстрых рекурсивных фильтров Баттерворта. Применяются два вида фильтров. В характерных точках программы с высокой скоростью канализации данных (например, при входной фильтрации) целесообразно использовать рекурсивные фильтры с целочисленными коэффициентами. Такие фильтры не требуют вычислений с плавающей запятой и оказываются значительно быстрее своих аналогов с "точными" коэффициентами. Однако следует учитывать, что процедура округления коэффициентов вызывает ряд известных проблем и, в частности, может привести к неустойчивости фильтра. В других характерных узлах программы, где цифровой фильтрации подлежат отсчеты с частотой дискретизации 100 Гц и ниже, оказывается возможным применять рекурсивные фильтры с "точными" коэффициентами, представленными в виде чисел с плавающей запятой. Такие фильтры более устойчивы, функционально ближе к своему аналоговому прототипу, но проигрывают в быстродействии. Рекурсивные фильтры подобного типа используются, в частности, в алгоритме детектора сейсмических сигналов. Обычно в аналоговых и цифровых устройствах лучший результат дают фильтры Баттерворта высокого порядка, полученные путем каскадного соединения звеньев второго порядка.
С целью увеличения времени автономности подводной геофизической станции, кроме непрерывного режима работы, предусмотрен ждущий режим регистрации с краткой записью предыстории события. Для организации ждущего режима в системе используется наиболее часто применяемый для целей обнаружения сейсмических сигналов так называемый STA/LTA-детектор, использующий алгоритм отношения энергий сигналов с короткопериодным и долгопериодным усреднением. Недостатком такого детектора, как известно, является пропуск первого вступления при работе по сильно когерентному сигналу. Для улучшения характеристик детектора разработана трехканальная версия с использованием признака группового совпадения "2 из 3-х". Это означает, что данные трех сейсмических каналов анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается только при совпадении сигналов «тревоги», по крайней мере, в двух каналах из трех. Такой метод повышает надежность работы системы в ждущем режиме. В случае обнаружения события в системе вырабатывается сигнал, разрешающий сохранить предыдущий файл данных во внешней памяти, в противном случае он стирается. Таким образом, осуществляется ждущий режим регистрации с записью фона перед событием.
Программа цифрового регистратора 22 содержит телекоммуникационный драйвер, который поддерживает полудуплексный режим связи с центральным микропроцессором 4. Связь осуществляется на основе оригинального высокопроизводительного бинарного протокола обмена с использованием отдельных сигналов интерфейса RS232. Управление связью и накоплением данных осуществляет центральный микропроцессор 4. Программа управления поддерживает файловую организацию, принятую в DOS. Массивы данных сохраняются на жестком диске в файлах, формат которых удовлетворяет принятым станционным требованиям, и при необходимости с помощью простейшего программного супервизора формата могут быть интегрированы в любой из существующих в мировой практике форматов обмена сейсмологическими данными.
В отличие от известных устройств, в которых применяется отдельный аналоговый регистратор с частотным диапазоном от 0,1 до 15 Гц, в предлагаемом устройстве использован регистратор с нижним частотным диапазоном от 0,003 Гц.
Управление работой всех измерительных датчиков подводной геофизической станции производится с помощью центрального микропроцессора 4 типа MicroPC, а основное накопление сигналов осуществляется на жестком диске. Все это позволило расширить частотный диапазон цифрового регистратора до 15 Гц сверху, динамический диапазон - до 120 дБ (с автоматическим переключением чувствительности на 2 поддиапазона) и полностью исключить аналоговую регистрацию.
При регистрации сейсмических сигналов на дне одним из важных направлений использования широкополосных донных сейсмографов является исследование микросейсмических шумов, возбуждаемых морскими и океаническими волнами. Микросейсмы проявляются в широком диапазоне частот и служат естественным фоном, который определяет порог чувствительности сейсмографов. Посредством предлагаемого устройства также выполняется регистрация характерных микросейсм с периодом около 6 секунд, а также выявляются микросейсмы с периодами 20 и 100 секунд, что позволяет выделить как объемные Р и S волны, так и поверхностные волны Лява (колебания в диапазоне частот 0,0125-0,05 Гц) и Релея.
Реализация устройства технической сложности не представляет, так как устройство реализовано на серийно выпускаемых датчиках и элементах микроэлектроники, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "промышленная применимость".
Источники информации
1. RU 2270464, 20.02.2006.
2. RU 2276388, 10.05.2006.
3. RU 2294000, 20.02.2007.
4. ЕР 0519031, 23.12.1992.
5. NO 911639, 26.10.1992.
6. ЕР 0516662, 09.12.1992.
7. Смирнов Г.В., Еремеев В.Н., Агеев М.Д. и др. Средства и методы океанологических исследований. - М.: Наука, 2005.
8. AU 2002100749, 13.03.2003.
9. GB 2183038, 28.05.1987.
10. US 3449950,17.06.1969.
11. ЕР 0490993, 24.06.1992.
12. DE 4039070,11.06.1992.
13. US 5128907, 07.07.1992.
14. NO 923428, 06.10.1992.
15. NO 171084, 30.06.1986.
16. NO 923269, 20.08.1992.
17. Ковчин И.С. Автономные океанографические средства измерений. - Л.: Гидрометеоиздат, 1991.
18. Леонтьев O.K. Морская геология. - М.: Высшая школа, 1982, 344 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЙСМИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ ПОИСКА И РАЗВЕДКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2010 |
|
RU2432588C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| СПОСОБ СЕЙСМИЧЕСКОГО МИКРОРАЙОНИРОВАНИЯ | 2010 |
|
RU2436125C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2449325C1 |
| ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ГЕОРАЗВЕДКИ | 2010 |
|
RU2436132C1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436118C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| ЗАЯКОРЕННАЯ ПРОФИЛИРУЮЩАЯ ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2014 |
|
RU2545159C1 |
Изобретение относится к устройствам измерения геофизических параметров и может быть использовано для оперативной оценки сейсмического и гидродинамического состояния придонной зоны морей и океанов. Сущность: станция выполнена в виде герметичного корпуса сферической формы диаметром 450 мм, установленного на раме из алюминиевых труб. Внутри герметичного корпуса размещены устройства, в числе которых донный сейсмометр, гидрофизический модуль, средства хранения информации, датчик пространственной ориентации, гравиметр, размыкатель балласта. Причем датчик пространственной ориентации установлен на карданном подвесе, а донный сейсмометр - на подвижной платформе. Герметичный корпус выполнен из высокопрочного алюминиевого сплава типа В95. На корпус нанесено защитное антикоррозионное покрытие в виде анодного оксидированного сплава с многослойным лакокрасочным покрытием. Станция снабжена буйрепом, балластом и буем, которые обеспечивают ее постановку и подъем на поверхность. Технический результат: расширение функциональных возможностей. 1 ил.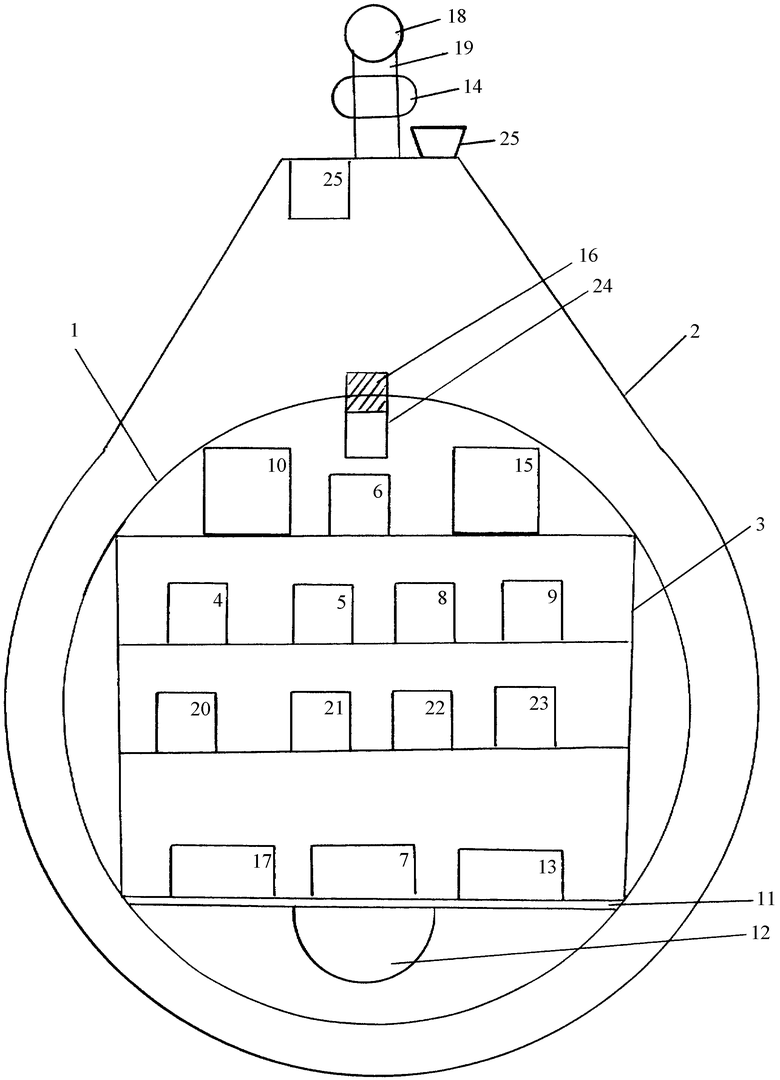
Подводная геофизическая станция, состоящая из герметичного корпуса сферической формы, стационарно установленного на раме, и содержащая средства регистрации геофизических сигналов, установленные внутри герметичного корпуса на шасси и включающие донный сейсмометр, гидрофизический модуль, средства хранения информации, датчик пространственной ориентации, установленный на карданном подвесе, балласт и размыкатель балласта, буй, отличающаяся тем, что герметичный корпус выполнен из высокопрочного алюминиевого сплава типа В95 с защитным антикоррозийным покрытием, нанесенным на корпус в виде анодного оксидированного сплава с многослойным лакокрасочным покрытием, герметичный корпус выполнен диаметром 450 мм, рама выполнена из алюминиевых труб, донный сейсмометр установлен на подвижной платформе, соединенной с шасси карданным подвесом, подводная геофизическая станция снабжена буйрепом, который соединен с балластом, дополнительно введен гравиметр.
| Башилов И.П | |||
| и др | |||
| Технические характеристики и результаты испытаний морского донного автономного регистратора сейсмических сигналов для поисков залежей углеводородов и газогидратов / Нефтегазовая геология | |||
| Теория и практика, 2009(4), подписано в печать 23.11.2009, с.1-11 | |||
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМОСИГНАЛОВ НА АКВАТОРИИ МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270464C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СЕЙСМИЧЕСКАЯ СТАНЦИЯ | 2004 |
|
RU2276388C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2005 |
|
RU2294000C1 |

