Изобретение относится к технике, занимающейся вопросами механического резания и разрушения, в основном хрупких монолитов, материалов и массивов, более конкретно к рабочим органам, предназначенным для разрушения горных пород ударно-режущим способом в условиях применения таких устройств в горнодобывающей промышленности.
Известны проходческие комбайны с планетарным рабочим органом типа ПКГ-3 (авт. св. 101917, кл. E 21 C 27/01, 1952), в которых используется экономичный ударно-режущий способ разрушения с траекториями перемещения режущей кромки инструмента в зоне разрушения по кривым эпициклоидальной формы. Способ этот дает относительно более крупный скол, позволяет осуществить разрушение пород более высокой крепости.
Известны также очистные комбайны для длинных забоев, например шнековые (авт. св. 1328510, кл. E 21 C 27/00, 1985) и барабанные (авт. св. 113050, кл. E 21 C 27/02, 1955), у которых для разрушения полезного ископаемого используется способ скалывания по принципу работы фрезы. Такие органы разрушают массив внутри цилиндрической поверхности с траекториями режущих кромок инструментов по циклоидам, форма которых практически не отличается от окружности.
Шнековые и барабанные органы разрушения позволяют скомпоновать удачную схему очистного комбайна с расположением рабочих органов, например, по концам корпуса машины на выходных валах поворотных редукторов-рукоятей, оси которых перпендикулярны вертикальной поверхности груди забоя. Такая компоновка (авт. св. 113050, кл. Е 21 С 27/02, 1955) без дополнительных устройств позволяет комбайну наиболее полно и качественно отработать пласт при минимальной площади незакрепленной кровли.
Однако комбайны со шнековыми и барабанными рабочими органами, из-за способа разрушения имеют существенные недостатки: высокое удельное энергопотребление, значительное пылевыделение, требуют большой энерговооруженности, допускают работу по относительно слабым горным породам, сильно измельчают добытое полезное ископаемое.
Известны также баровые органы, например, плоский бар врубовой машины [1] .
Баровый орган врубовой машины состоит из следующих узлов:
1. Из корпуса самого бара.
Корпус бара имеет возможность из транспортного положения в процессе зарубки поворачиваться вокруг оси приводной звездочки посредством специального устройства врубмашины (каната, гидравлического домкрата и др. ), а в рабочем положении при подрубке пласта прикрепляется к ее корпусу, например, посредством пальца-фиксатора.
2. Из ведущего элемента - приводной звездочки, закрепленной на выходном валу своего привода.
3. Из ведомого, исполнительного элемента - режущей цепи, оснащенной режущими инструментами, например зубками.
4. Из обводного элемента, который может быть выполнен в виде пассивной звездочки, обводного утюга специальной конфигурации или ролика, закрепленных на конце консоли корпуса бара.
Разрушение массива в процессе подрубки баровый орган производит способом скалывания, при этом на прямолинейном участке движения режущей цепи в ручье бара действие по разрушению массива подобно работе пилы, а на участке движения режущей цепи по обводному элементу бара - ролику подобно работе дисковой фрезы.
При переходных процессах во время зарубки, при заведении бара из транспортного в рабочее положение, на участке движения режущей цепи по обводному элементу бара - ролику реализуется ударно-режущий способ разрушения. Траекториями перемещения режущих кромок инструментов в этом случае являются эпитрохоиды. В процессе вырубки, при выведении бара из рабочего в транспортное положение режущие кромки инструментов, находящихся на участке режущей цепи, движущейся по обводному элементу - ролику, совершают перемещения по траекториям вида некоторых гипотрохоид, т. е. и в этом случае осуществляется разрушение ударно-режущим способом. Известно также устройство, применяемое в деревообрабатывающей промышленности для нарезания шипов, представляющее собой качающуюся дисковую пилу, плоскость диска которой неперпендикулярна оси вращения. В просторечии такой шипорез известен под названием "пьяная пила".
Шнек, барабан и качающаяся пила разрушают массив способом скалывания, а все разобранные выше органы разрушения (резания), дают линейчатую поверхность с гребешками и выемками, остающимися после прохода режущей кромки инструмента. Последующая подача, как правило, дает почти полное попадание данной кромки в ранее сделанную выемку из-за плоских траекторий кромок инструментов. Такое явление приводит к тому, что почти всегда стружка снимается со дна выемки, т. е. имеет место фактор блокированного резания. Это увеличивает удельные энергозатраты, т. к. длина линии отрыва элемента разрушаемого массива и соответственно его площадь увеличиваются за счет наличия неразрушенных гребешков. Ограниченная энерговооруженность машины заставляет уменьшать толщину стружки или увеличивать количество линий резания, что ведет к измельчению разрушенной массы, к возрастанию пылеобразования. Следует отметить, что для разрушения самих гребешков требуется приложить минимальные усилия, если в идеале эти усилия приложить в направлении, перпендикулярном оси гребешков.
Целью разработки нового типа рабочего органа для очистного комбайна (стругокомбайна) является снижение энерговоору- женности и уменьшение пылеобразования за счет реализации экономичного ударно-режущего способа разрушения и существенного устранения фактора блокиро- ванного резания за счет использования в таком органе траекторий движения режущих кромок инструментов в зоне разрушения по сложным пространственным кривым, представляющим собой трохоидальный винтоид.
Для решения поставленной задачи предлагается создать гибридный орган, включающий в себя конструктивные особенности своих прототипов, которыми являются плоский режущий бар врубовой машины и шипорезное устройство "пьяная пила".
Принципиальной отличительной особенностью нового органа являются неперпендикулярное фиксированное или перестраиваемое расположение плоскости бара относительно оси вращения выходного вала ведущей звездочки. Звездочка закреплена на этом валу таким образом, что ее ось и ось выходного вала привода этой звездочки пересекаются в ее центре. Другим существенным отличием является наличие дополнительного привода, кинематически связанного с корпусом бара. Корпус бара закрепляется на ведомую часть выходного вала дополнительного привода соосно со звездочкой и в нашем случае освобождается от других связей с корпусом машины с тем условием, чтобы корпус бара мог беспрепятственно совершать сложное движение, типа прецессионного движения гироскопа, вместе с ведущей звездочкой и одновременно вращаться вокруг ее оси. Входящий в сложное движение косо закрепленной ведущей звездочки компонент ее вращения направлен встречно вращению корпуса бара. Для передачи вращения от дополнительного привода на корпус бара предлагается использовать шарнирно сочлененный вал, например, с шарниром равных угловых скоростей или карданово-шарнирное сочленение, ведущая часть вала которого расположена внутри полого выходного вала привода ведущей звездочки, а на ведомую часть закрепляется корпус бара, о чем выше упоминалось.
Внимательное рассмотрение кинематической схемы механизма предлагаемого органа позволяет заключить, что он представляет собой плоский дифференциально-волновой механизм с внешним расположением гибкого элемента, жесткий элемент которого закреплен под непрямым углом к оси валов его приводов подобно диску "пьяной пилы". Плоский механизм такого типа с ортогональным его расположением относительно оси приводов упоминается в статье М. Иванова "Волновые передачи" (журнал НТО СССР, N 4, с. 19, предпоследний абзац).
На основании сказанного, в описании в дальнейшем будет применяться терминология, используемая в теории волновых передач.
В механизме предлагаемого органа укороченный корпус бара выполняет роль водила генератора волн волновой передачи. Увеличенная ведущая звездочка для привода цепи бара выполняет роль жесткого элемента, в данном случае вращаемого. Гибким элементом механизма является режущая цепь бара. Уменьшенный обводной элемент бара (пассивная звездочка, ролик или иное подобное устройство) выполняет функцию ролика генератора волн.
Работа по разрушению массива в предлагаемому органе отличается от работы бара. В таком органе разрушение массива должны производить только активные инструменты, т. е. те инструменты, которые находятся на звеньях режущей цепи, в момент работы по разрушению опертых на окружность обводного элемента - ролика. Пассивные инструменты, т. е. те инструменты, звенья которых находятся на прямолинейном участке движения режущей цепи и на ведущей звездочке, в работе по разрушению массива участвовать не должны. Иными словами, работа по разрушению в предлагаемом органе подобна работе плоского барового органа инструментами, находящимися на участке обводного элемента - ролика - в процессе вырубки. Косое расположение механизма бара обеспечивает получение пространственных траекторий режущих кромок инструментов за счет наличия качания, - некоторого подобия прецессии гироскопа, - элементов предлагаемого органа.
Работает орган следующим образом. При одновременном встречном вращении звездочки жесткого элемента и водила генератора волн ролик генератора перемещает волну гибкого элемента режущей цепи вокруг оси вращения устройства и одновременно осуществляется осевое качание водила и звездочки за счет неперпендикулярности закрепления механизма относительно оси вала привода звездочки. Волновое движение гибкого элемента и качание органа заставляет режущие кромки инструментов, опертых на поверхность ролика генератора волн, совершать сложное движение по траекториям винтоподобных пространственных кривых с переменным шагом винта, проекции которых на плоскость контура гибкого элемента органа представляют собой гипотрохоиды некоторого вида, а на плоскости осевого сечения механизма органа - проходящие через оси симметрии гипотрохоид Λ или V-образные фигуры разной степени раскрытия, которые в иных случаях (при нулевом шаге винта) могут иметь вид прямых или наклонных трихов, образующих фигуру Λ (V). При таком движении массив разрушается изнутри сферы последовательно отдельными выемками пространственной формы, расположенными на поверхности обработки со смещением вдоль оси вращения органа. Такие траектории в конечном итоге дают сетчатую поверхность внутри сферы обработки разрушаемого массива после некоторого цикла разрушения. В этом случае реализуется пространственный ударно-режущий способ разрушения, позволяющий существенно устранить фактор блокированного резания.
Предлагаемый орган по своей конструкции является дифференциально-волновым и далее в описании будет именоваться дифференциально-волновым органом разрушения с пространственными траекториями движения режущих кромок инструментов.
Орган, созданный на основе бара врубовой машины, будет неуравновешенным, поэтому предлагается сделать орган в принципе подобный двухлучевому бару, ведущая звездочка которого находится в центре вращаемых масс сдвоенного бара, а лента гибкого элемента охватывает одновременно все выступающие зубья звездочки жесткого элемента и оба ролика генератора волн. Такая компоновка конструкции подобна волновой передаче, имеющей двухволновой генератор волн.
Конструктивно дифференциально-волновой орган разрушения может быть выполнен разнесенным, т. е. с роликами, оси которых расположены за пределами контура жесткого элемента.
Предлагаемый орган разрушения позволяет получать нужный режим разрушения путем изменения размеров элементов устройства и (или) выбором соотношения векторов частот вращения водила генератора волн и жесткого элемента, а также заданием угла расположения оси вращения водила генератора волн относительно оси вала привода звездочки жесткого элемента.
Если жесткий элемент плоского дифференциально-волнового органа разрушения затормозить или прикрепить к корпусу машины, то в этом случае получим простейший орган разрушения - плоский планетарно-волновой, который кинематически повторяет обычную волновую передачу. При закреплении на каждом звене цепи гибкого элемента по одному инструменту количество выемок от отдельных инструментов на окружности обработки при работе такого органа определяется количеством зубьев на жестком элементе, т. е. на звездочке, и в конечном итоге равно этому количеству, т. к. очередное снятое с ведущей звездочки волной (роликом генератора волн) звено цепи с пассивным инструментом позволяет коснуться и обработать поверхность забоя другому, очередному активному инструменту, находящемуся в зоне разрушения. Отсюда можно заключить, что толщина стружки, снимаемой соседним следующим инструментом, зависят от количества зубьев на жестком элементе. Следовательно, выбор режимов разрушения ограничен и возможен только путем изменения геометрических размеров элементов устройства, из которых легко изменяется только вылет стойки инструмента.
В органе разрушения с подвижным жестким элементом, у которого на каждом звене цепи гибкого элемента закреплено по одному инструменту, количество выемок на окружности обработки зависит от количества зубьев на жестком элементе и самое существенное - от значения соотношения векторов частот вращения водила генератора волн и жесткого элемента - звездочки. Зависимости, раскрывающие кинематику работы плоского теоретического механизма дифференциально-волнового органа разрушения, подробно разобраны в Приложении - "Кинематические зависимости".
Т. о. предлагаемый дифференциально-волновой орган разрушения позволяет осуществить принудительное регулирование режимов разрушения как изменением геометрических размеров элементов, что ограничивает универсализм регулирования, так и путем целенаправленного выбора соотношения и направления угловых частот водила генератора волн, и освобожденного от связи с корпусом устройства, жесткого элемента, что является более широким, более доступным способом регулирования режимов разрушения массива. Такой выбор частот можно осуществить путем применения реверсивных многоскоростных или регулируемых двигателей и (или) включением в кинематическую цепь данного привода (звездочки или водила генератора) различных вариаторов или редукторов. Кроме этого, задавая угол между осями вращения приводов элементов и плоскостью механизма органа, можно получить пространственные траектории, которые дают возможность в некоторой мере устранить фактор блокированного резания.
Расположение режущих (отбойных) инструментов на шаге звена цепи гибкого элемента следует выбирать ближе к переднему, по ходу водила, шарниру, т. к. в этом случае процесс внедрения инструмента в массив происходит с меньшими усилиями, а при выходе наблюдаются более интенсивные разрушения. Подобный эффект известен из теории работы гусеницы гусеничного трактора, но в гусеничном движителе такое явление стремятся не допускать, ослабить его влияние.
Установка нескольких инструментов на каждом звене цепи гибкого элемента, в том числе и на вынесенной вперед по ходу водила консоли звена позволит производить более полное разрушение за меньшее количество проходов роликов генератора волн и с меньшими энергозатратами.
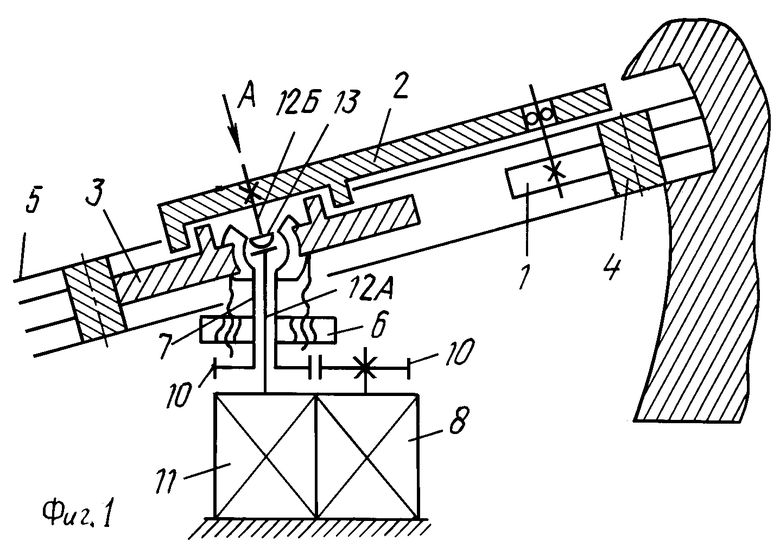
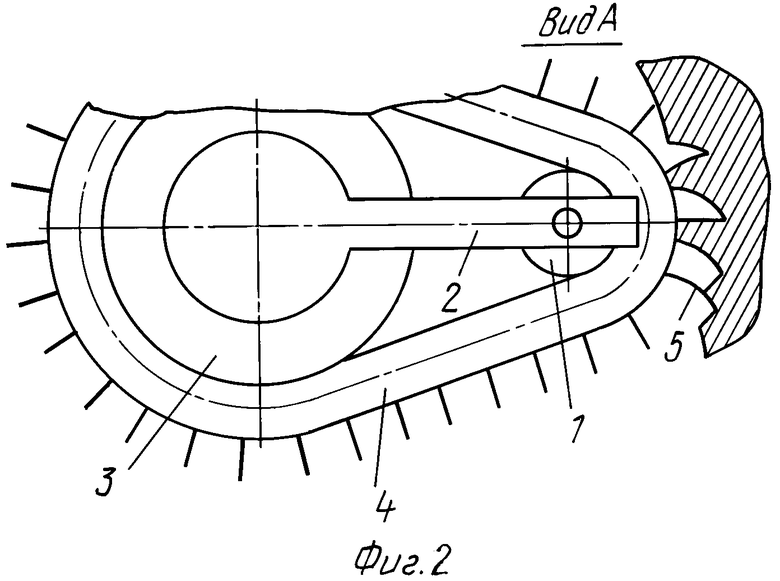
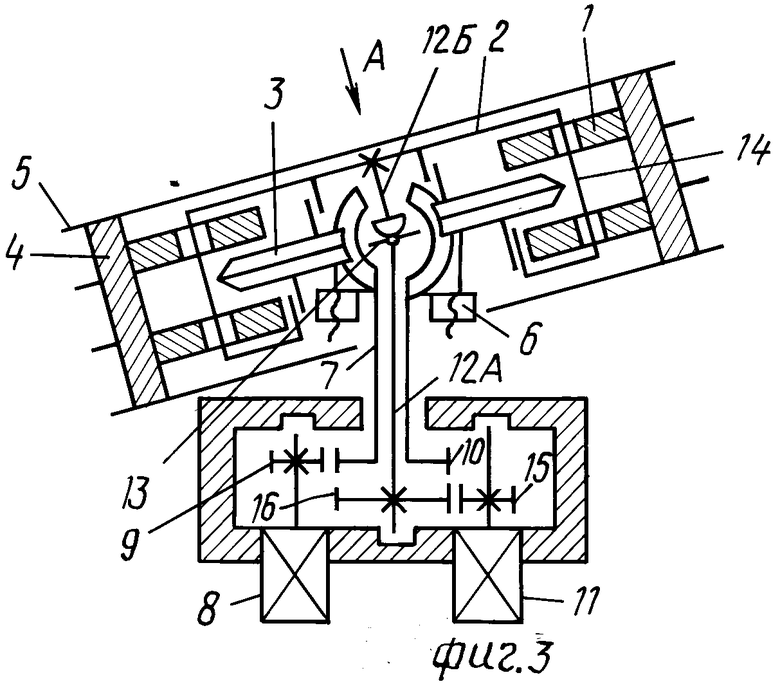
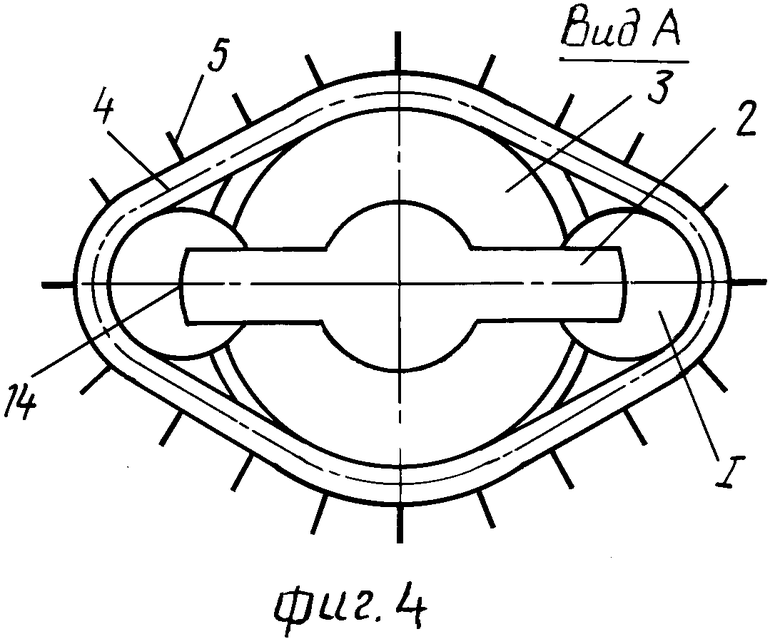
На фиг. 1 и 2 показан принцип устройства дифференциально-волнового органа разрушения с принудительным регулированием режимов разрушения по траекториям кривых пространственной формы; на фиг. 3 и 4 - схема устройства дифференциально-волнового органа разрушения с принудительным регулированием режимов разрушения барабанного типа, имеющего двухволновой генератор волн, траектории режущих кромок инструментов которого представляют собой кривые пространственной формы.
Устройство имеет ролик 1 генератора волн, закрепленный на водиле 2, звездочку 3 жесткого элемента и ролик 1 генератора волн охватывает контур гибкого элемента 4. На внешней стороне гибкого элемента 4 - режущей цепи - закреплены режущие (отбойные) инструменты 5. Вся конструкция элементов органа расположена под непрямым углом к оси вращения валов приводов подобно диску "пьяной пилы". Угол наклона конструкции осуществляется посредством устройства склонения органа 6, которое одновременно является конструктивным элементом передачи момента на ведущую звездочку 3, благодаря чему предоставляется возможность менять угол между плоскостью звездочки 3 и осью выходного вала 7 ее привода 8. Водило 2 генератора волн располагается в плоскости, параллельной плоскости ведущей звездочки 3 и ролика 1 генератора волн, и закрепляется на цилиндрическом выступе, выполненном заодно с ведущей звездочкой 3 таким образом, чтобы можно было осуществлять вращение водила 2 вокруг оси косо закрепленной ведущей звездочки 3. Вращение ведущей звездочки 3 осуществляется от привода 8 посредством пары шестерен 9 и 10.
Вращение водила 2 генератора волн осуществляется от привода 11 посредством составного вала 12А - 12Б, сочлененного, например, шарниром равных угловых скоростей 13, при этом ведущая часть этого вала 12А, являясь продолжением выходного вала привода 11, проходит внутри полого вала 7 ведущей звездочки 3, а на ведомую часть вала 12Б закреплено водило 2 генератора волн.
Во время работы органа, при вращении водила 2 генератора волн его ролик 1 перемещает волну гибкого элемента 4 вокруг оси вращения элементов устройства, заставляя кромки инструментов 5 двигаться по траекториям гипотрохоид некоторого вида. При таком движении массив разрушается последовательно отдельными выемками, расположенными по дуге окружности. Одновременное вращение звездочки 3 жесткого элемента путем целенаправленного выбора частоты и направления вращения дает возможность корректировать траектории режущих кромок инструментов, а также количество выемок на окружности обработки, обеспечивая нужный режим разрушения, т. е. нужную толщину и направление снятия элементарной стружки, оптимальную с точки зрения энерговооруженности машины, физико-механических свойств разрушаемого массива и прочности элементов и узлов органа разрушения. Параметры плоской стружки можно задать выбором соотношения векторов частот вращения элементов органа, для чего применить реверсивные многоскоростные или регулируемые двигатели и (или), включив в кинематические цепи элементов органа редукторы-вариаторы. Наличие качания органа за счет его косого расположения позволяет плоские гипотрохоиды превращать в пространственные винтоподобные, шаг которых на различных участках поверхности сферы обработки меняется за счет косого расположения ведущей звездочки 3 органа разрушения, благодаря чему на поверхности сферы обработки образуется сложная пространственная сетка траекторий, которые позволяют устранить фактор блокированного резания.
Орган разрушения состоит из звездочки 3, плоскость которой расположена под непрямым углом к оси полого выходного вала посредством устройства склонения органа 6 и в данном случае этим устройством закреплена на полом валу 7. По торцам звездочки 3 расположены диски водила 2 двухволнового генератора волн. На выступах этих дисков закреплены оси 14 с надетыми на них роликами 1. Водило 2 расположено соосно со звездочкой 3, оперто на буртики подшипниковых узлов водила, выполненных заодно со звездочкой 3 и жестко соединено с ведомой частью 12Б шарнирно сочлененного вала, например, посредством шарнира равных угловых скоростей 13. Выступающие зубья звездочки 3 и оба ролика 1 генератора волн охватывает контур цепи гибкого элемента 4. На внешней стороне звеньев цепи гибкого элемента 4 закреплены инструменты 5.
На звездочку 3 вращение передается от двигателя 8 посредством пары шестерен 9 и 10, из которых шестерня 9 закреплена на выходном валу двигателя 8, а шестерня 10 - на полом валу 7, на другом конце которого закреплена ведущая звездочка 3.
На водило 2 генератора волн вращение передается от двигателя 11 посредством пары шестерен 15 и 16, из которых шестерня 15 закреплена на выходном валу двигателя 11, а шестерня 16 - на ведущей части сплошного сочлененного вала 12А. Посредством шарнира 13, например шарнира равных угловых скоростей, вращение передается ведомой части вала 12Б, на другом конце которой жестко закреплен диск водила 2 генератора волн.
Угол склонения органа и соответствующие частоты вращения, например, реверсивных многоскоростных или регулируемых двигателей 8 и 11, а также передаточные отношения шестерен 9 - 10 привода звездочки 3 жесткого элемента и соответственно пары шестерен 15 - 16 привода водила генератора волн с учетом геометрических размеров элементов органа разрушения обеспечивают заданные параметры режимов разрушения, определяемые толщиной и направлением снятия элементарной стружки, ее формой и положением внутри сферы обработки разрушаемого массива.
Для демонстрации идеи пространственного дифференциально-волнового органа разрушения построена модель механизма, описание которой дается в приложении - "описание модели для демонстрации идеи волнового органа разрушения".
Предлагаемый орган разрушения в сравнении со шнековым и барабанным органами разрушения, а также режущим баром, где используется способ скалывания, позволяет ожидать увеличения скорости резания и повышения надежности инструмента из-за прерывистой его работы и существенного снижения энергозатрат, идущих на разрушение, за счет использования ударно-режущего способа разрушения, реализующего физику криволинейных зависимостей ускорения по законам тригонометрических функций и обеспечивающего снятие элементарной стружки в сторону ранее полученного обнажения, а также за счет использования сложных пространственных траекторий, позволяющих значительно устранить фактор блокированного резания.
Дифференциально-волновой орган разрушения с принудительным регулированием режимов может иметь высокую степень безопасности, т. к. в нем без потери рабочих качеств органа можно использовать очень малую окружную скорость гибкого элемента и соответственно, инструментов. Эта особенность резко ограничит возможность травм работников при захвате одежды или частей тела движущимся инструментом, что нередко наблюдается при работе режущего барабана или шнека.
Применение данного типа органа в горнодобывающей промышленности для разрушения пластов полезного ископаемого при его выемке, кроме названных выше показателей, позволяет ожидать относительно более крупный скол, что должно снизить пылеобразование, улучшить санитарные условия труда. Существующие органы разрушения, использующие способ скалывания, являются источниками большого количества мелкодисперсной пыли.
Кроме названной отрасли, данный тип органа разрушения может быть применен в строительстве на машинах по разрушению и утрамбовке грунта, в сельскохозяйственной технике на машинах по обработке почвы или на посадочных машинах для пропашных культур, в коммунальном хозяйстве на машинах по разрушению корки льда или слежавшегося снега на тротуарах, дорогах, взлетно-посадочных полосах аэродромов, в машиностроении при обычной или профильной обработке материалов, причем нужный профиль достаточно легко получить, изменяя размеры элементов устройства и (или) выбором вектора угловых частот водила генератора волн и звездочки жесткого элемента, а также величину склонения плоскости органа. (56) Авторское свидетельство N 255156, кл. B 21 C 25/24, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧИЙ ОРГАН ГОРНОГО ОЧИСТНОГО КОМБАЙНА | 1992 |
|
RU2066755C1 |
| Горная машина | 1990 |
|
SU1809037A1 |
| Горная машина | 1990 |
|
SU1809038A1 |
| РАБОЧИЙ ОРГАН ГОРНОГО ОЧИСТНОГО КОМБАЙНА | 1993 |
|
RU2066756C1 |
| ГОРНЫЙ ОЧИСТНОЙ КОМБАЙН | 1993 |
|
RU2065959C1 |
| СПОСОБ МЕХАНИЧЕСКОГО РАЗРУШЕНИЯ МАТЕРИАЛОВ, МОНОЛИТОВ И МАССИВОВ И РАБОЧИЙ ОРГАН ГОРНОГО ОЧИСТНОГО КОМБАЙНА | 1994 |
|
RU2076206C1 |
| Камнерезная машина | 1988 |
|
SU1633128A1 |
| Механизм подачи канатно-цепной пилы | 1979 |
|
SU859632A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ СКВАЖИН НЕКРУГЛОГО СЕЧЕНИЯ | 1992 |
|
RU2026489C1 |
| Цепная волновая передача | 1990 |
|
SU1726870A1 |
Изобретение относится к рабочим органам, предназначенным для разрушения горных пород ударно-режущим способом. Сущность: рабочий орган включает корпус с закрепленными на нем отводными элементами, который установлен по выходной части шарнирно сочлененного вала дополнительного привода. Звездочка установлена на выходном валу основного привода. Звездочка и корпус расположены наклонно к оси выходного вала привода звездочки посредством механизма наклона. Выходные валы звездочки и корпуса кинематически связаны с основным и дополнительным приводами соответственно для обеспечения выбора заданных режимов работы органа, параметры которых зависят от соотношения векторов угловых частот корпуса и звездочки, а также от величины наклона рабочего органа относительно оси выходного вала привода звездочки. 2 ил.
РАБОЧИЙ ОРГАН ГОРНОГО ОЧИСТНОГО КОМБАЙНА, включающий корпус с закрепленными на нем обводными элементами, звездочку, установленную на выходном валу привода, и гибкую режущую цепь с зубками, отличающийся тем, что, с целью уменьшения энерговооруженности и снижения пылеобразования за счет реализации ударно-режущего способа разрушения и устранения фактора влияния блокированного резания, он снабжен дополнительным регулируемым приводом с шарнирно сочлененным валом, на выходной части которого закреплен корпус, причем корпус и звездочка расположены наклонно к оси выходного вала привода звездочки посредством механизма склонения плоскости, а выходные валы звездочки и корпуса кинематически связаны с основным приводом, выполненным регулируемым, и дополнительным приводом соответственно.
