Изобретение относится к горной промышленности и может быть использовано на рудных и нерудных месторождениях для исследования и контроля зарождающихся процессов, склонных к динамическому проявлению.
Известен способ оценки изменения напряженного состояния массива горных пород, в котором приемные датчики располагают по осям в прямоугольной системе координат [1] .
Однако трудность точного взаимного расположения приемных датчиков в точках приема делает его мало пригодным.
Наиболее близким по существу является способ, по которому контролируемый участок горного массива оконтуривается приемными датчиками и по разности времени прихода упругой волны от образовавшейся несплошности определяется местоположение очага [2] .
К недостаткам известного способа следует отнести низкую достоверность ввиду неразличия двух одновременно произошедших несплошностей как следствие выдачи ложного результата.
Целью изобретения является повышение достоверности и точности способа.
Цель достигается тем, что в известном способе определения очаговых зон в массиве горных пород, заключающемся в измерении временной разности прихода волн от образовавшейся несплошности на приемные датчики и определении ее местоположения выбирают однородный участок горного массива, в котором пробуривают скважины так, чтобы забои этих скважин находились в углах правильного тетраэдра и один в его геометрическом центре, приемные датчики устанавливают в забои пробуренных скважин, а расстояние между ними выбирают из формулы: ln
ln > r > l , где α - коэффициент затухания;
> r > l , где α - коэффициент затухания;
А1 и Аi - амплитуда сигнала принятая первым и i-м приемным датчиком;
l - максимальный размер несплошности, координаты которой необходимо определить;
r - расстояние меду забоями скважин.
Сопоставительный анализ с прототипом показывает, что заявляемый способ отличается тем, что выбирают однородный участок горного массива, в котором пробуривают скважины так, чтобы забои этих скважин находились в углах правильного тетраэдра и один в его геометрическом центре, приемные датчики устанавливают в забои пробуренных скважин, а расстояние между ними выбирают из формулы.
Таким образом заявляемый способ соответствует критерию "новизна".
Известен способ локации с помощью сети разнесенных в пространстве приемных датчиков.
Однако точность такого способа низка, так как установка приемных датчиков точно по приведенной схеме затруднительна ввиду того, что неизвестен рельеф дна, куда они устанавливаются (необходимая точность до 1 см). Во-вторых, наличие "мертвых" зон делает способ малопригодным, т. е. если волна приема одновременно на три приемных датчика - локация невозможна. Именно установка приемных датчиков в углах тетраэдра и его геометрическом центре, а также выбранное по формуле расстояние между ними позволяют проводить локацию очаговых зон в массиве горных пород, что весьма важно при проведении работ в горном массиве, где априорная информация о месте возникновения несплошности полностью отсутствует.
Таким образом, заявленное техническое решение обладает существенными отличиями.
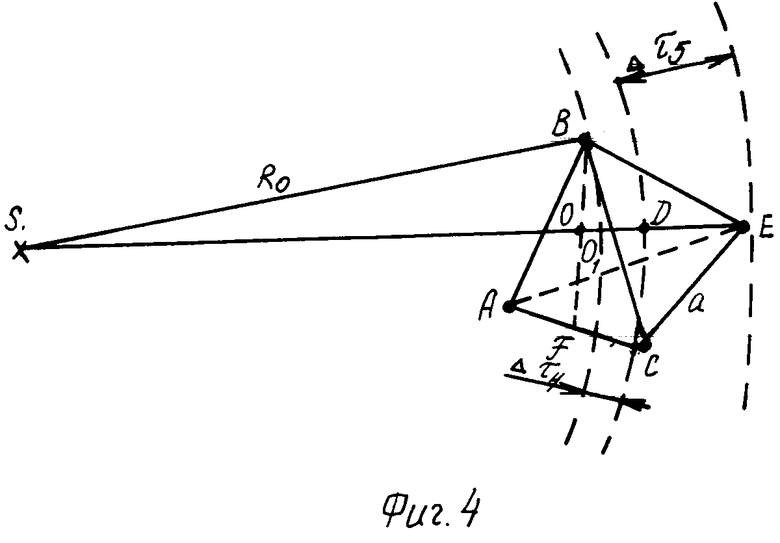
На фиг. 1 приведено устройство, реализующее способ; на фиг. 2 - диаграмма направленности приемного датчика; на фиг. 3 - зона контроля массива горных пород предложенным способом; на фиг. 4 - построения для вывода формулы.
Для реализации способа в качестве блока 2 (фиг. 1) может быть использована модель 4429 (каталог 1983/84, электронная аппаратура, Брюль и Кчер), а приемные датчики могут быть изготовлены, например, как приведено в статье - Нечаев В. В. , Кривошеев И. А. "Акустико-эмиссионный преобразователь для контроля массивов горных пород". Тез. докл. Всес. конф. "Использование современных методов в неразрушающих исследованиях и контроле". Хабаровск, 1984, с. 311-312.
Способ осуществляется следующим образом. Выбирают однородный участок горного массива. Пробуривают скважины таким образом, чтобы забои скважин соответствовали углам фигуры тетраэдр, а одну скважину так, чтобы ее забой находился в геометрическом центре тетраэдра. В забои скважин помещают приемные датчики 1. Изменяя длину стороны тетраэдра добиваются, чтобы приемные датчики находились на расстоянии друг от друга, где r выбирается из формулы: ln
ln > r > l (1) где α - коэффициент затухания;
> r > l (1) где α - коэффициент затухания;
А1, Аi - амплитуда, принятая соответственно первым и i-м приемным датчиком;
l - максимальный размер несплошности, координаты которой необходимо определить.
Выходы приемных датчиков подключены к блоку 2 (фиг. 1) электронной регистрации, где производится определение временных задержек вступлений упругих волн и расчет координат источника. Первый член неравенства (1) указывает на необходимость незначительного расхождения амплитуд принятых сигналов приемными датчиками всей системы для определенного типа волн, например, продольных. Третий член l ограничивает ранг или масштабность контроля. Размер l связан с энергией события, так если необходимо контролировать очаговые зоны на стадии их формирования (ориентировочная максимальная энергия таких событий 10 - 103 Дж, это с учетом, что современные сейсмостанции фиксируют события с минимальной энергией 102 Дж), то максимальный размер такой несплошности согласно будет примерно равен 2-4 м. Следовательно, с одной стороны r ограничено 2N3 м, а с другой (при α = 0,03; ln = 0,356) - 12.
= 0,356) - 12.
Один приемный датчик имеет рабочую зону, т. е. зону уверенного приема сигналов в заданном амплитудном диапазоне в виде сферы радиуса R (фиг. 2). На фиг. 3 показана контролируемая зона по предлагаемому способу, в котором приемные датчики расположены в горном массиве согласно формулы (1). Объем v1, контролируемой зоны вычисляется по формуле:
V1≃  R3 (2)
R3 (2)
К менее важным преимуществам предлагаемого способа стоит отнести технологичность установки датчиков. Бурильный механизм с одной установки бурит скважины согласно вышеприведенному способу. Это позволяет исключить работы связанные с перемещением бурильного механизма по этажам, горизонтам и сверлением переходных скважин с горизонта на горизонт и пр. и прокладкой соединительных кабелей от различных разнесенных мест установки приемных датчиков.
К преимуществам данного способа также следует отнести снижение влияния анизотропии. Контролируемый участок горного массива по своей структуре неоднороден и скорости распространения волн, используемые в расчетах координат по известному способу, в различных направлениях отличаются друг от друга, вследствие координат датчика, требующая для своего исключения подробной аттестации участка горного массива по скоростям в различных направлениях, что требует больших затрат.
В частном случае, когда волна приходит одновременно на три приемных датчика, т. е. перпендикулярно к грани тетраэдра, в известные три (только в этом случае) уравнения
(x-x1)2 + (y-y1)2 + (r-r1)2 = Ro2
(x-x4)2 + (y-y4)2 + (r-r4)2 = (Ro + v τ4)2
(x-x5)2 + (y-y5)2 + (r-r5)2 = (Ro + vτ5)2, (3) где x, y, r - координаты источника;
xi, yi, ri - координаты i-го приемного датчика;
Ro - расстояние от первого приемного датчика до источника
добавляется еще одно выведенное из геометрических построений (фиг. 4)
Ro=  , (4) где а - сторона тетраэдра.
, (4) где а - сторона тетраэдра.
Для сравнения погрешностей определения координат источника известным и предлагаемым способами запишем уравнение (3) в виде:
(x-x1)2 + (y-y1)2 + (r-r1)2 = Ro2
(x-xi)2 + (y-yi)2 + (r-ri)2 = (Ro + ΔRi)2 (5)
Предложенный способ определения очаговых зон с координатами образовавшихся несплошностей был положен в основу разработанной аппаратуры. Изготовлен рабочий макет и проведены натурные испытания на шахте "Таштагольская". Расстояние между приемными датчиками выбиралось по формуле (1) и равнялось 5 м. Устанавливалась такая группа приемных датчиков в орте 10 гор. - 210. В результате испытаний получены результаты, позволяющие судить о том, что координаты как образовавшихся несплошностей, так и искусственных источников определялись с оценкой "удовлетворительно". (56) 1. Авторское свидетельство СССР
N 1075208, кл. G 01 V 1/24, 1984.
2. Авторское свидетельство СССР
N 242430, кл. G 01 V 1/00, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения источников акустической эмиссии в массиве горных пород | 2020 |
|
RU2753166C1 |
| Способ локации источников акустической эмиссии в массиве горных пород | 2015 |
|
RU2613050C1 |
| СПОСОБ РАЗРАБОТКИ КРУТОПАДАЮЩИХ РУДНЫХ ТЕЛ | 1994 |
|
RU2095570C1 |
| СКВАЖИННЫЙ ДАТЧИК ДЛЯ ГЕОФИЗИЧЕСКИХ ИССЛЕДОВАНИЙ | 1990 |
|
RU2009529C1 |
| СПОСОБ ВЕДЕНИЯ ВЗРЫВНЫХ РАБОТ | 1997 |
|
RU2116612C1 |
| Способ контроля характеристик скважинных датчиков | 1990 |
|
SU1697025A1 |
| Способ контроля акустического контакта скважинных датчиков | 1989 |
|
SU1718175A1 |
| Способ определения параметров расслоения кровли горных выработок | 1984 |
|
SU1232800A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ СТАТИЧЕСКИХ ДЕФЕКТОВ | 2004 |
|
RU2272280C1 |
| ВЗРЫВНОЕ УСТРОЙСТВО | 1993 |
|
RU2086898C1 |
Использование: в горной промышленности, в том числе на рудных и нерудных месторождениях для исследования и контроля динамических проявлений горного давления. Сущность изобретения: скважины для установки приемных датчиков пробуривают в однородном массиве с известными затуханием α, а также скоростями продольных Vp поперечных Vs волн и заданным размером участка. Датчики устанавливают в углах тетраэдра и в его геометрическом центре. Расстояние r между датчиками определяют из выражения 1/αlnA1/Ai> r >l, где l - максимальный размер источника акустической эмиссии; A1, Ai - амплитуда сигнала, принятая первым и i-м датчиками. 4 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ АКУСТИЧЕСКОЙ ЭМИССИИ В ГОРНОМ МАССИВЕ, заключающийся в бурении скважин, размещении в них приемных датчиков, измерении временной разности прихода волн от источника акустической эмиссии и определении его координат, отличающийся тем, что, с целью повышения достоверности и точности способа, для обуривания массива выбирают однородный его участок, при этом приемные датчики в скважинах размещают в углах тетраэдра и в его геометрическом центре, а расстояние r между ними выбирают из выражения ln
ln > r > l/
> r > l/
где α - коэффициент затухания акустического сигнала в массиве;
A1, Ai - амплитуда сигнала, принятая первым и i-м приемными датчиками;
l - максимальный размер источника акустической эмиссии.
