Изобретение относится к такелажной оснастке, а именно к захватам для подъема и транспортирования длинномерных конструкций с использованием дистанционного захвата их в труднодоступных местах.
Известно грузозахватное устройство, содержащее подвеску, кинематически связанные с ней рычаги, соединенные с ними захватные органы и прикрепленные к боковой поверхности в верхней части захватных органов упоры для груза.
Это устройство не удобно при использовании в труднодоступных местах, т. к. захват груза (конструкции) возможен только с непосредственным участием стропальщика.
Цель изобретения - повышение удобства в эксплуатации.
С этой целью в известном грузозахватном устройстве, содержащем подвеску, кинематически связанные с ней рычаги, соединенные с ними захватные органы и прикрепленные к боковой поверхности в верхней части захватных органов упоры для груза, кинематическая связь подвески с каждым рычагом представляет собой строп, захватные органы представляют собой С-образные скобы, а устройство снабжено балкой, шарнирно прикрепленной к верхним частям скоб перпендикулярно их горизонтальным полкам, закрепленным на балке вертикально зевом вниз крюком и присоединенной к подвеске гибкой тягой со скобой на свободном конце для взаимодействия с крюком.
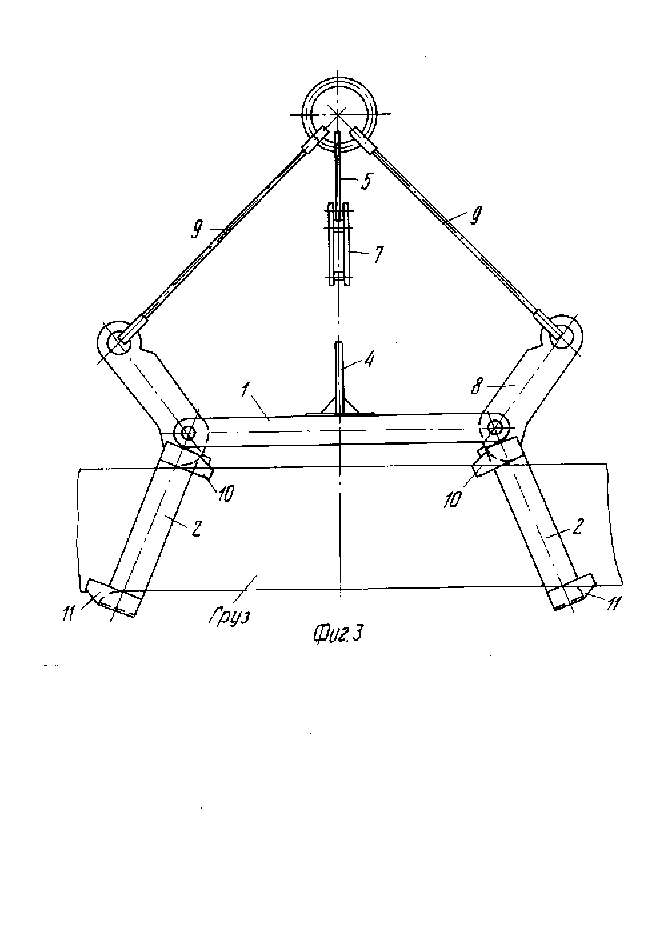
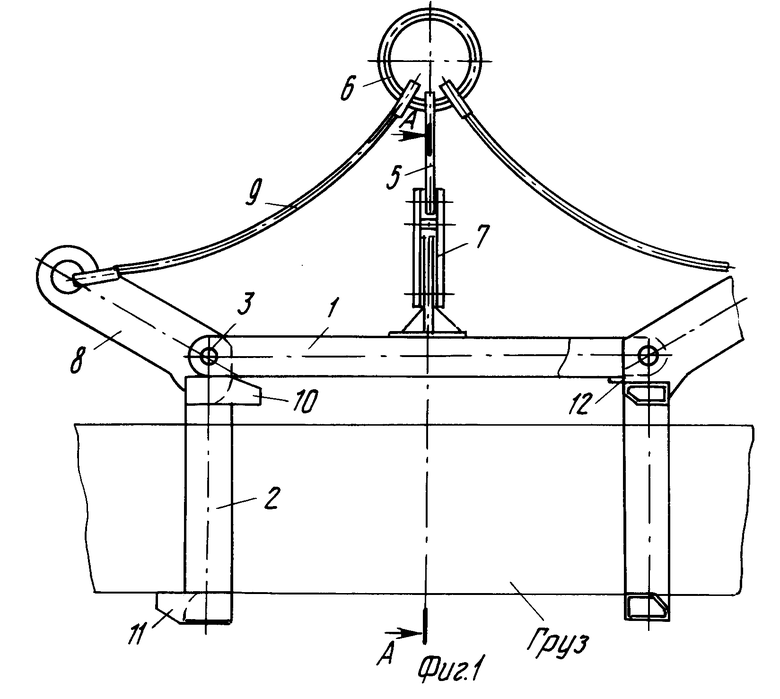
На фиг. 1 изображено грузозахватное устройство в состоянии наведения на груз, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - грузозахватное устройство в состоянии транспортирования груза, общий вид.
Грузозахватное устройство содержит балку 1, захватные С-образные скобы 2, закрепленные на балке 1 посредством осей 3. На балке 1 закреплен жестко крюк 4 зевом вниз. На внутренней ветви 5 стропа 6 закреплена серьга 7, сцепляющаяся с крюком 4. Захватные скобы 2 снабжены рычагами 8, связанными с наружными ветвями 9 стропа 6. На концах консолей захватных скоб 2 установлены упоры 10 и 11. Скобы 2 снабжены и упорами 12, ограничивающими поворот их до вертикального исходного положения.
Работает устройство следующим образом.
Навешенное на крюк грузоподъемного средства порожнее устройство наводят на захватывающий груз (конструкцию), установленный, например, на опорах или подкладках. Кольцо стропа 6 грузоподъемным средством опускается до сползания серьги 7 с крюка 4. Устройство поднимается посредством наружных ветвей 9, ранее остававшихся в провисшем состоянии. При этом рычаги 8 со скобами 2 поворачиваются до упора нижних консолей скоб 2 снизу в груз. После этого начинается подъем зажатого в скобах 2 груза. Дополнительную страховку груза от выпадания из захватных скоб 2 обеспечивают упоры 10 и 11, развернувшиеся вместе со скобами 2 в зону проекции груза.
Для освобождения груза его устанавливают на опоры или подкладки и опускают кольцо стропа 6 до зацепления серьги 7 с крюком 4, после чего грузоподъемным средством устройство снимают с груза. При этом ветви 9 находятся в провисшем состоянии, а скобы 2 под собственным весом в исходном вертикальном положении.
Грузозахватное устройство рекомендуется для производства демонтажных работ в труднодоступных местах. В качестве груза могут быть, например, строительные фермы, балки, ригели, трубы, бревна и т. д. (56) Мазель Ю. С. , Поляков А. Г. Грузозахватные приспособления. М. , 1954, с. 35, рис. 15 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВОЙ ЗАХВАТ ДЛЯ ЗУБЧАТОГО ВЕНЦА | 1991 |
|
RU2009985C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И ПОДЪЕМА ПЛАВАЮЩИХ ОБЪЕКТОВ | 1991 |
|
RU2009979C1 |
| ГРУЗОВОЙ ЗАХВАТ | 1991 |
|
RU2009980C1 |
| ГРУЗОВОЙ ЗАХВАТ | 1991 |
|
RU2009975C1 |
| ЭКСЦЕНТРИКОВЫЙ ЗАХВАТ ДЛЯ ГРУЗОВ | 1991 |
|
RU2009982C1 |
| Грузозахватное устройство для железнодорожных звеньев | 1990 |
|
SU1729999A1 |
| ГРУЗОЗАХВАТНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ИЗДЕЛИЙ С ОТВЕРСТИЕМ | 1990 |
|
RU2009983C1 |
| Грузозахватная система | 1988 |
|
SU1684232A1 |
| Саморазгружающийся контейнер Веретенникова | 1987 |
|
SU1507673A1 |
| Грузовой захват | 1989 |
|
SU1689282A1 |

Использование: для демонтажа конструкций в труднодоступных местах. Сущность изобретения: грузозахватное устройство содержит навешиваемую на крюк грузоподъемного средства траверсу 1 и закрепленные на ее концах посредством поперечных ей осей захватные органы 2, механизм дистанционного расцепления траверсы от грузового стропа, который состоит, по крайней мере, из одного крюка 4, закрепленного на траверсе 1, зевом вниз, и серьги7, закрепленной на конце внутренней ветви грузового стропа 5, взаимодействующей с крюком траверсы. Захватные органы 2, выполнены в виде С-образных скоб, в исходном положении устанавливающихся в вертикальных плоскостях, перпендикулярных траверсе 1. Крепление захватных скоб к траверсе расположено на их верхних консолях, где также закреплены рычаги 8, направленные от плоскости симметрии траверсы и с ней составляющие угол 90 - 150. Концы рычагов 8 связаны с наружными ветвями стропа 9, длина которых обеспечивает их провисание при подъеме порожнего захвата посредством внутренней ветви грузового стропа. Концы консолей захватных скоб снабжены упорами 10, направленными перпендикулярно плоскостям захватных скоб. 1 з. п. ф-лы, 3 ил.