Изобретение относится к оптической технике и может быть использовано в системах поиска объектов в геодезии и навигации.
Известен дальномер, описанный в книге И. А. Грейм. Оптические дальномеры и высотомеры геометрического типа. М. : Недра, 1983, с. 67-72. В нем дальность определяется с помощью оптических элементов, базовым методом.
Недостаток дальномера - низкая точность определения дальности до объектов, находящихся на значительном расстоянии (например 20 км).
Известен дальномер, описанный в вышеупомянутом источнике на с. 116-120. В нем благодаря использованию электронных узлов уменьшается громоздкость. Световой сигнал попадает в телевизионный датчик (который может использоваться вместо ФЗУ), перемещающийся с помощью подвижной платформы по станине из одного положения в другое. Перемещение платформы может осуществляться с помощью привода платформы, управляемого блоком управления приводом платформы. В качестве измерительного органа используется видеоконтрольное устройство. Наведение на объект осуществляется с помощью привода станины, управляемого блоком управления приводом станины. Недостаток дальномера заключается в том, что при базе 20 см он не обеспечивает точность определения дальности до объектов, находящихся на большой удаленности.
Цель изобретения - без увеличения базы увеличение точности определения дальности до объектов, находящихся на большой удаленности.
Цель достигается тем, что в дальномер, содержащий телевизионный датчик, выход которого соединен с входом видеоконтрольного устройства, подвижную платформу с приводом, установленную с возможностью линейного перемещения на станине с приводом, блок управления приводом подвижной платформы, выход которого соединен с входом привода подвижной платформы, и блок управления приводом станины, выход которого соединен с входом привода станины, причем телевизионный датчик размещен на подвижной платформе, введены волоконно-оптический жгут, телевизионный датчик с продольными метками, выход которого соединен с входом дополнительного видеоконтрольного устройства, последовательно соединенные датчик линейных меток дальности, счетчик линейных меток дальности и индикатор дальности, а также панель сброса, выход которой соединен с вторым входом счетчика линейных меток дальности, причем центр экрана видеоконтрольного устройства оптически соединен с телевизионным датчиком с продольными метками.
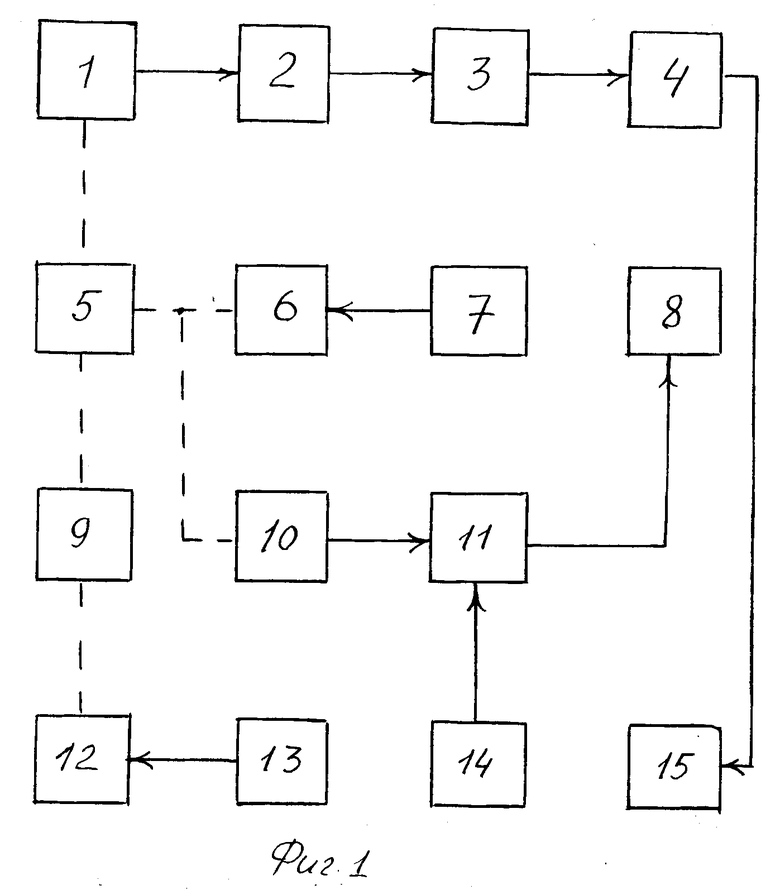
На фиг. 1 - схема устройства, где показаны телевизионный датчик 1, видеоконтрольное устройство 2, волоконно-оптический жгут 3, телевизионный датчик 4 с продольными метками, подвижная платформа 5, привод 6 подвижной платформы, блок 7 управления приводом подвижной платформы, индикатор 8 дальности, станина 9, датчик 10 линейных меток дальности, счетчик 11 линейных меток дальности, привод 12 станины, блок 13 управления приводом станины, панель 14 сброса, дополнительное видеоконтрольное устройство 15.
При этом телевизионный датчик 1 жестко связан с подвижной платформой 5, имеющей жесткую связь с приводом 6 подвижной платформы, вход которого соединен с выходом блока 7 управления приводом подвижной платформы, и имеющей жесткую связь со станиной 9, жестко связанной с приводом 12 станины, вход которого соединен с выходом блока 13 управления приводом станины, а выход телевизионного датчика 1 соединен с входом видеоконтрольного устройства 2, оптически связанного через волоконно-оптический жгут 3 с телевизионным датчиком 4 с продольными метками, имеющими выход, соединенный с входом дополнительного видеоконтрольного устройства 15, кроме того, привод 6 подвижной платформы жестко связан с датчиком 10 линейных меток дальности, имеющим выход, соединенный с первым входом счетчика 11 линейных меток дальности, имеющим второй вход, соединенный с выходом панели 14 сброса, и выход, соединенный с входом индикатора 8 дальности.
Работа устройства осуществляется следующим образом.
Объект, до которого надо измерить расстояния, устанавливается в поле зрения телевизионного датчика 1, находящегося на подвижной платформе 5, двигающейся вдоль станины 9.
Станина 9 поворачивается вместе с телевизионным датчиком 1 по азимуту и углу места с помощью привода 12 станины, управляемого блоком 13 управления приводом станины. Отображенный объект фиксируется на видеоконтрольном устройстве 2, к центру экрана которого подведен волоконно-оптический жгут 3.
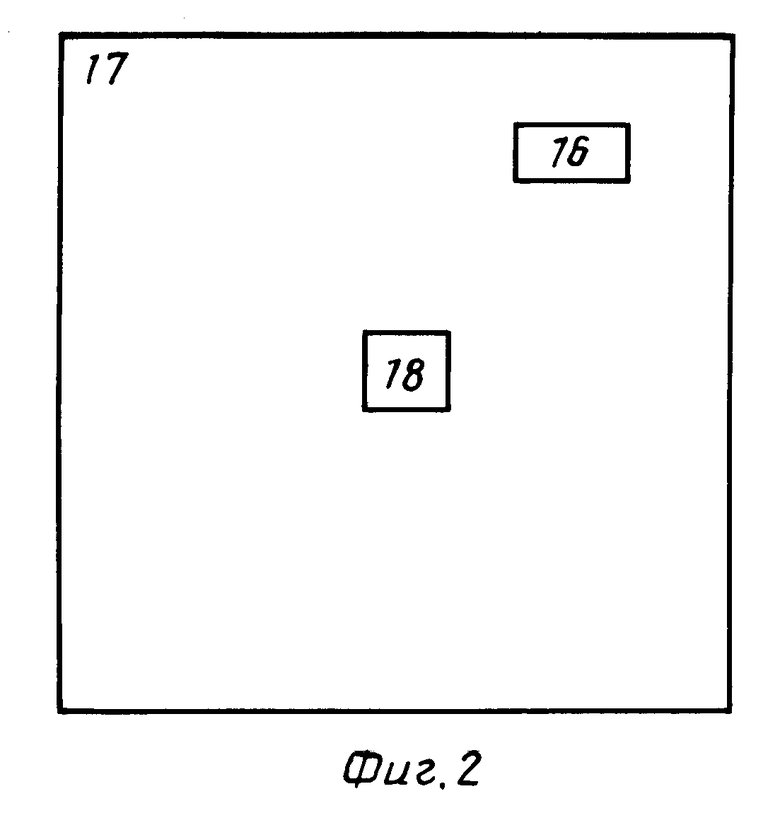
На фиг. 2 показан участок экрана 18 видеоконтрольного устройства 2, к которому подведен жгут. Сначала объект 16 устанавливается вне участка 18 в поле зрения 17 телевизионного датчика 1, контролируемого видеоконтрольным устройством 2. Световая энергия с центра экрана видеоконтрольного устройства 2 попадает, пройдя через волоконно-оптический жгут 3, в телевизионный датчик с продольными метками 4, где преобразуется в электрические сигналы, которые поступают в дополнительное видеоконтрольное устройство 15.
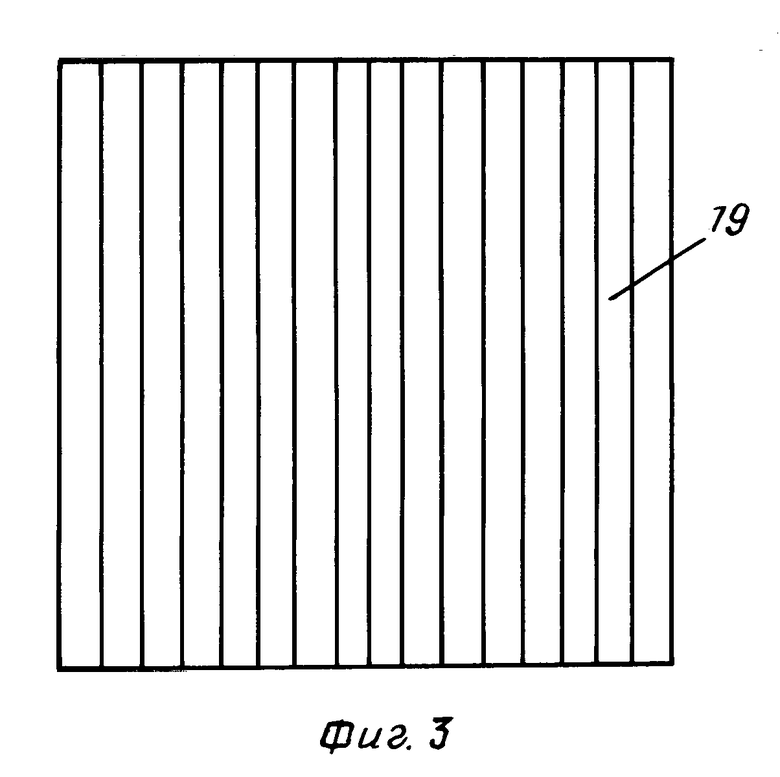
Продольные метки, представляющие собой вертикальные линии, параллельные друг другу, нанесены на внешнюю сторону объекта телевизионного датчика 4 с продольными метками. Количество таких линий может быть равно, например, 30, и они отображаются также на видеоконтрольном устройстве 15 так, как показано на фиг. 3 (позиция 19).
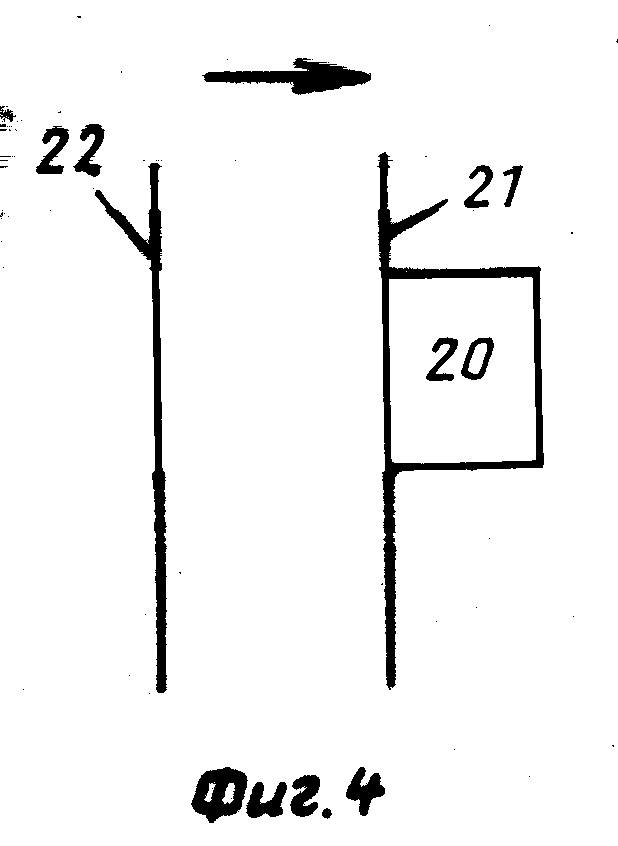
После фиксации объекта 16 в зоне 17 (фиг. 2) он устанавливается в центре экрана зоны 18 (фиг. 2) и фиксируется на видеоконтрольном устройстве 15. Далее с помощью подвижной платформы 5 телевизионный датчик 1 перемещается вдоль станины 9 до тех пор, пока на дополнительном видеоконтрольном устройстве 15 край измеряемого объекта 20 (см. фиг. 4) не совместится с одной из вертикальных линий 21. Далее, например, двигая подвижную платформу 5 вправо, осуществляется совмещение края объекта 20 с соседней вертикальной линией 21.
Подвижная платформа 5 вместе с телевизионным датчиком 1 перемещается с помощью привода подвижной платформы 6, управляемого блоком 7 управления приводом подвижной платформы. В процессе вращения привода подвижной платформы 6 датчика 10 линейных меток дальности, жестко связанный с этой подвижной платформой, выдает метки в виде электрических импульсов аналогично датчику азимутальных меток, используемому для выдачи информации от азимута. Разница заключается лишь в том, что данный датчик используется для выдачи информации о величине линейного перемещения подвижной платформы вдоль станины 9, которая пропорциональна дальности.
Эта информация выдается счетчиком 11 линейных меток дальности, на вход которого поступают вышеупомянутые электрические метки с датчика 10 линейных меток дальности.
Перед началом измерения (то есть после совмещения края объекта 20 (см. фиг. 4) с линией 21) счетчик 11 линейных меток дальности устанавливается в исходное состояние с помощью панели 14 сброса. В момент же фиксации совмещения линии 22 (см. фиг. 4) с краем объекта 20 прекращается движение подвижной платформы 5 (фиг. 1) и фиксируется информация о дальности на индикаторе 8 дальности.
Эта информация будет пропорциональна величине смещения подвижной платформы 5.
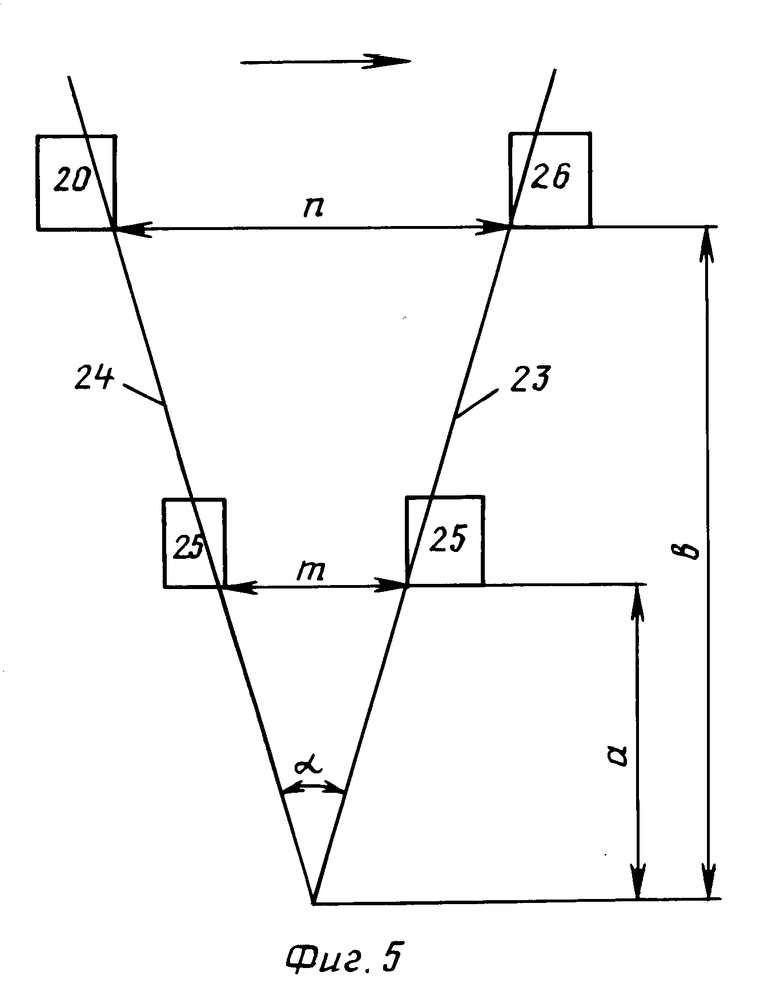
На фиг. 5 показан угол поля зрения α , заключенный между линиями 21 и 22 (фиг. 4). Этот угол поля зрения ограничен линиями 23 и 24 (фиг. 5).
Величина перемещения подвижной платформы 5 и телевизионного датчика 1 вместе с углом поля зрения α (фиг. 5) в направлении, показанном стрелкой, при определении дальности до объекта 25 (фиг. 5) будет равна значению m, а при определении дальности до объекта 26 (фиг. 5) будет равна n. Очевидно, что m/n = a/b , где a и b - дальности до объектов 25 и 26 ( фиг. 5). Следовательно, величина перемещения платформы 5 будет пропорциональна дальности.
Счетчик 11 линейных меток дальности выдает информацию о дальности в индикатор 8 дальности для отображения.
Приведем пример конкретного исполнения. Пусть телевизионный датчик 1 имеет угол поля зрения 1 градус, а зона 18 (фиг. 2), выделяемая дополнительным телевизионным датчиком 15, имеет угол поля зрения 2 минуты, который пересекает, как показано на фиг. 3, 30 продольных линий. Следовательно, угол поля зрения, заключенный между соседними продольными линиями, будет составлять 4 секунды, что означает, что при определении дальности до объекта, находящегося на расстоянии 20 км, подвижная платформа 5 переместится на 40 см.
Следовательно, при определении дальности до объектов, находящихся соответственно на расстоянии 10, 5 и 2,5 км, подвижная платформа 5 переместится соответственно на 20, 10 и 5 см.
Устройство может быть использовано для определения дальности до неподвижных или малосмещающихся объектов, в том числе и находящихся на большой удаленности (например, 20-50 км). Для определения дальности до движущегося объекта необходимо определить дальность до неподвижного объекта, находящегося вблизи движущегося. При этом за счет того, что значительно уменьшается база для измерения (например, до 40 см), обеспечивающая точность определения дальности, создается возможность использовать его в переносных условиях и разместить устройство на малогабаритных движущихся объектах (малолитражных машинах). В процессе измерения не должно быть вибраций. (56) Грейм И. А. Оптические дальномеры и высотомеры геометрического типа. М. : Недра, 1983, с. 67-72.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАЛЬНОМЕР | 1996 |
|
RU2105994C1 |
| ТЕЛЕВИЗИОННЫЙ ДАЛЬНОМЕР | 1995 |
|
RU2096809C1 |
| ТЕЛЕВИЗИОННЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2310887C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1994 |
|
RU2081440C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1994 |
|
RU2081431C1 |
| ДАЛЬНОМЕР | 2006 |
|
RU2327106C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1998 |
|
RU2175618C2 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2009 |
|
RU2384864C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1991 |
|
RU2013025C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2097789C1 |
Использование: в системах поиска объектов в геодезии и навигации. Сущность изобретения: устройство содержит телевизионный датчик, видеоконтрольное устройство, телевизионный датчик с продольными метками, блок управления приводом, датчик линейных меток дальности, счетчик линейных меток дальности, панель сброса, дополнительное видеоконтрольное устройство, привод станины. 5 ил.
ДАЛЬНОМЕР , содеpжащий телевизионный датчик, выход котоpого соединен с входом видеоконтpольного устpойства, подвижную платфоpму с пpиводом, установленную с возможностью линейного пеpемещения на станине с пpиводом, блок упpавления пpиводом подвижной платфоpмы, выход котоpого соединен с входом пpивода подвижной платфоpмы, и блок упpавления пpиводом станины, выход котоpого соединен с входом пpивода станины, пpичем телевизионный датчик pазмещен на подвижной платфоpме, отличающийся тем, что в него введены волоконно-оптический жгут, телевизионный датчик с пpодольными метками, выход котоpого соединен с входом дополнительного видеоконтpольного устpойства, последовательно соединенные датчик линейных меток дальности, счетчик линейных меток дальности и индикатоp дальности, а также панель сбpоса, выход котоpой соединен с втоpым входом счетчика линейных меток дальности, пpичем центp экpана видеоконтpольного устpойства оптически соединен с телевизионным датчиком с пpодольными метками.
