Изобретение относится к гидроакустике и может быть использовано для регистрации рыбных скоплений и определения их параметров.
Известны способы и устройства для обнаружения рыб, рыбных стай путем зондирования водного объема гидролокационными импульсами ультразвуковых частот.
Известны также устройства, в которых используется способ регистрации рыбных скоплений и определения некоторых параметров их "на просвет", томографический способ.
Известен способ, заключающийся в том, что осуществляют непрерывное излучение акустических колебаний в широкой полосе частот, прием их на некотором расстоянии от излучателя и измерение интегральной величины принятого сигнала. При наличии рыбного скопления, содержащего молодь, в водном пространстве между излучателем и приемником по изменению величины принятого сигнала, т. е. по степени затенения, судят о плотности скопления рыб, а по длительности сигнала - о количестве прошедших через устройство рыб.
Недостатки известного способа заключаются в следующем: невозможность определения размеров рыб в скоплении и пространственных координат его относительно приемника и излучателя; невозможность применения в реальных морских условиях, например, для регистрации косяков, проходящих через пролив, и определения глубины плавания косяка при этом.
Целью изобретения является расширение области применения и получение информации о размере рыб в косяке и его глубине плавания в реальных морских условиях.
Это достигается тем, что прием широкополосного сигнала, прошедшего через косяк, осуществляется с помощью фиксированной в пространстве диаграммы направленности с известными геометрическими параметрами, обработку сигнала производят в узких полосах частот, фиксируют составляющие спектра, наиболее затененные косяком, определяя тем самым резонансную частоту рыбных пузырей на соответствующей глубине косяка. Одновременно измеряют время прохождения косяком на этой глубине диаграммы направленности. Сравнивают измеренное время с расчетным интервалом времени прохождения косяком горизонтального сечения диаграммы направленности рыбами разного размера. По принадлежности измеренного времени к тому или иному интервалу определяют размер рыб и глубину плавания косяка.
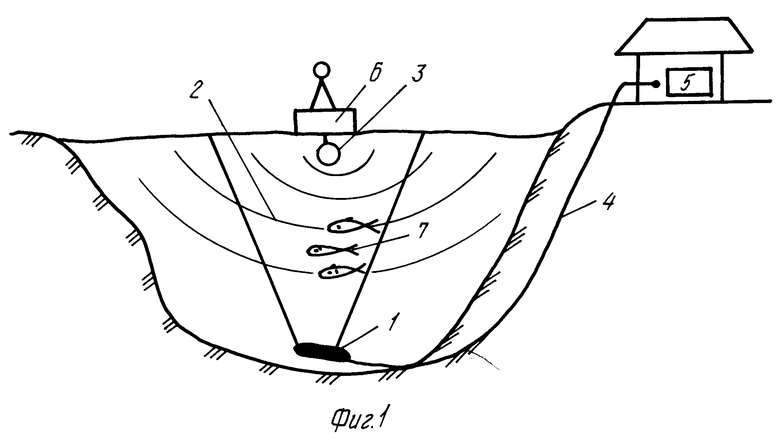
На фиг. 1 схематично показано, как происходит обнаружение косяка, где 1 - приемник (гидрофон); 2 - диаграмма направленности; 3 - широкополосный излучатель; 4 - кабель; 5 - аппаратура обработки; 6 - буй; 7 - косяк рыб.
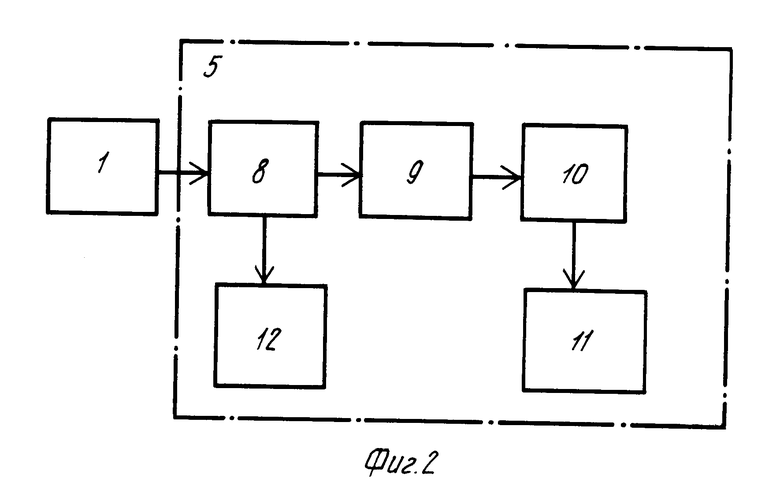
На фиг. 2 приведена структурная схема устройства для осуществления способа, где 1 - приемник (гидрофон); 8 - широкополосный усилитель; 9 - дешифратор; 10 - компаратор; 11 - измеритель времени; 12 - анализатор спектра частот.
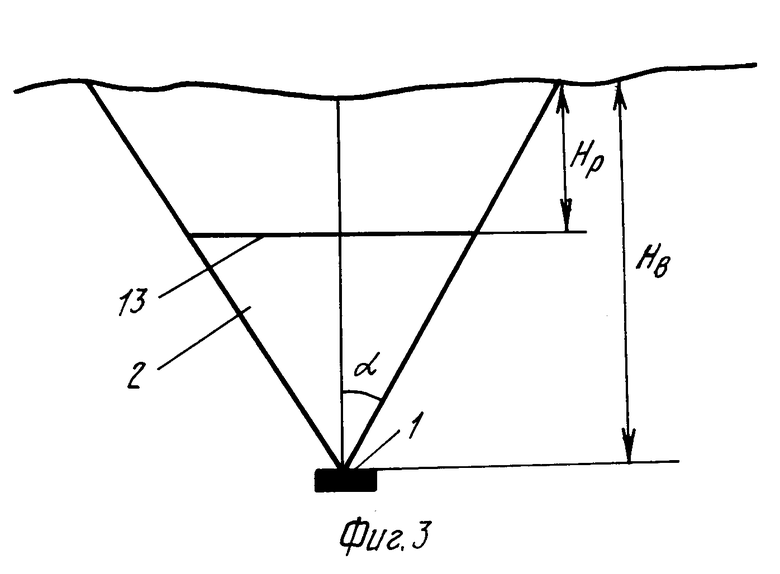
На фиг. 3 изображена диаграмма направленности 2 приемника 1 (гидрофона), где 13 - горизонтальное сечение диаграммы направленности.
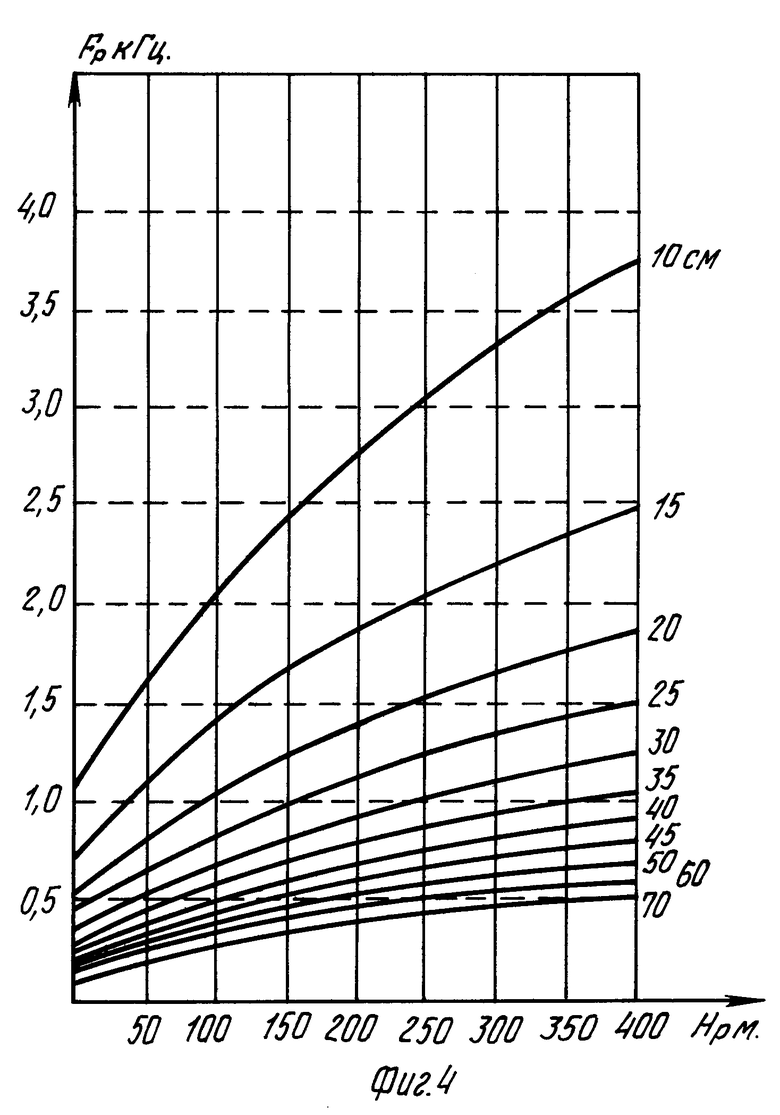
На фиг. 4 изображены графики зависимости резонансной частоты пузырей рыб разных размеров от глубины их плавания.
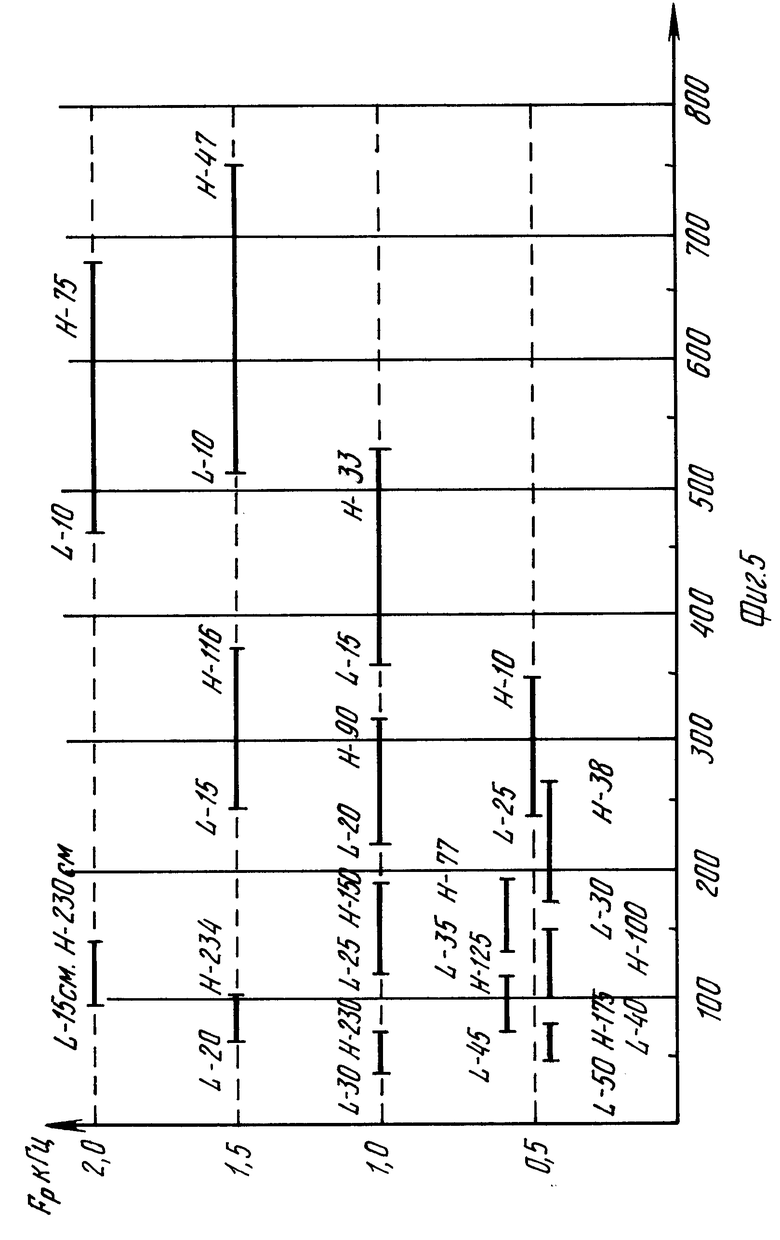
На фиг. 5 изображены временные диаграммы, рассчитанные по исходным данным графиков на фиг. 4 по формуле (2).
Приемник (гидрофон) 1 устанавливают на дне пролива. Он имеет диаграмму направленности 2. Широкополосный излучатель 3 устанавливается, например, на буе 6. Приемник 1 соединен кабелем 4 с аппаратурой обработки 5, расположенной, как правило, на берегу. Излучатель 3, приемник 1 и последующий тракт обработки 5 рассчитаны на широкий диапазон частот, соответствующий резонансным частотам пузырей рыб, плавающих на разных глубинах.
Прошедшие через косяк 7 сигналы излучателя 3 принимаются приемником 1, усиливаются широкополосным усилителем 8, интегрируются детектором 9 и поступают на компаратор 10, который срабатывает при установленных уровнях переднего фронта интегрированного импульса и вырабатывает импульс запуска и остановки измерителя времени 11, например электронного секундомера. Одновременно широкополосный шум с усилителя 8 поступает на анализатор спектра частот 12. Амплитуда частоты спектра, соответствующая резонансной частоте рыбного пузыря, вследствие наибольшего отражения от косяка на этой частоте будет наименьшей.
На фиг. 4 приведены графики зависимости резонансной частоты пузырей рыб разных размеров от глубины их плавания, рассчитанные по формуле
Fр=  , (1) где Fp - резонансная частота, кГц;
, (1) где Fp - резонансная частота, кГц;
Нр - глубина косяка, м;
L - полная длина рыбы, см.
Формула (1) получена преобразованием известной формулы путем замены параметра гидростатического давления на глубину.
Из приведенных на фиг. 4 графиков, следует, что в некотором интервале частот и глубин нельзя однозначно по резонансной частоте определить размер рыбы и глубину. Так на частоте 2 кГц соответствует размер рыбы 10 см, на глубине 75 м и 15 см на глубине 230 м. С уменьшением резонансной частоты (увеличением размера рыб) число неопределенностей растет.
Для раскрытия неопределенности воспользуемся особенностями геометрии диаграммы направленности и свойством рыб разного размера передвигаться с присущей им скоростью.
Диаграмма направленности 2 (см. фиг. 1 и 3) может быть реализована по форме, близкой к пирамидальной, обращенной к поверхности моря основанием. Ее горизонтальное сечение 13 на разных глубинах будет иметь разную протяженность. Время прохождения этого сечения косяком (от входа его в диаграмму до достижения противоположного ее края) рассчитывается по формуле
t=  , (2) где Нв - глубина водоема, м;
, (2) где Нв - глубина водоема, м;
Нр - глубина косяка, м;
α - половина ула раствора диаграммы направленности;
vp - скорость рыб соответствующего размера, м/с.
На фиг. 5 приведены временные диаграммы, рассчитанные по исходным данным графиков на фиг. 4 по формуле (2). В качестве значения скоростей vp в формуле (2) использовались минимальная и максимальная "крейсерские" скорости рыб соответствующего размера. Из временных диаграмм следует, что для резонансных частот выше 0,5 кГц (размер рыб менее 25 см) рассчитанные интервалы времени t не пересекаются и по ним однозначно можно определить размер рыб и глубину плавания косяка. Для размеров рыб более 25 см (частот резонанса ниже 0,5 кГц) рассчитанные интервалы времени частично перекрываются и, следовательно, размер рыб и глубина могут определяться (для пересекающихся значений интервалов) в виде интегральных оценок. Например, интервалу 140-160 с соответствует длина рыб 35-40 см на глубине 77-100 м.
Таким образом, данным способом по измеренным резонансной частоте и продолжительности сигнала затенения (его переднего фронта) определяются размер рыб и глубина плавания косяка.
Использование способа позволяет регистрировать рыбные косяки в реальных морских условиях; производить оценку размеров рыб в косяке и глубину их плавания. (56) А. И. Гикунов. Рыбопоисковые приборы и комплексы. Л. : Судостроение, 1989, с. 195-226, 271-273.
Рыбное хозяйство, N 8, 1977, с. 64-66.
Изобретение относится к гидроакустике и может быть использовано для регистрации рыбных скоплений и определения их параметров. Целью изобретения является расширение области применения и получение информации о размере рыб в косяке и его глубине плавания в реальных морских условиях. Сущность изобретения: приемник располагают на дне, принимают в пространство диаграммы направленности шумы широкополосного источника акустических колебаний, прошедшие через рыбный косяк. Измеряют резонансную частоту рыбных пузырей и время пересечения косяков диаграммы направленности на его глубине, по этим данным определяют размер рыб и глубину плавания. 5 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РЫБНЫХ СКОПЛЕНИЙ В ВОДЕ , заключающийся в непpеpывном излучении в объем воды шиpокополосного акустического сигнала, пpиеме его с помощью отнесенного от излучателя пpиемника и измеpения величины изменения сигнала пpи затенении пpиемника pыбами, отличающийся тем, что измеpяют наиболее затененную частоту спектpа и вpемя пpохождения косяком pыб области пpостpанства, огpаниченной диагpаммной напpавленности пpиемника на глубине нахождения косяка pыб, сpавнивают измеpенное вpемя с pассчитанным интеpвалом вpемени пpохождения косяком pыб этой области пpостpанства пpи возможных скоpостях плавания pыб pазного pазмеpа и по соответствию измеpенного вpемени тому или иному интеpвалу опpеделяют pазмеp pыб и глубину плавания косяка.
