Изобретение относится к гидроакустике, в частности к обнаружению подводных шумящих объектов способом шумопеленгования.
Широко известен способ шумопеленгования [1] в котором осуществляется пространственная и частотная селекция шумов обнаруживаемого объекта и помех, усиление их и выделение на фоне помех полезного сигнала. В этом способе при большом уровне помех и слабых сигналах обнаружение последних затруднено, не менее сложной проблемой является отличие объектов подводных от находящихся на поверхности.
Цель изобретения реализация обнаружения слабошумящих подводных объектов (рыбных косяков, подводных самодвижущихся платформ, аппаратов) в условиях превышения фоновых помех, в частности динамических и технических шумов, над собственными сигналами шумоизлучения объекта и отличие подводного объекта от надводного.
Сущность изобретения заключается в том, что в известном способе, содержащем пространственную и частотную селекцию сигналов объекта и помехи, их усиление, детектирование и принятие решения об обнаружении по изменению уровня выходного сигнала, пространственную селекцию сигнала и помехи производят с помощью диаграммы направленности антенны, имеющей угол раствора, обеспечивающий примерное равенство площади сечения диаграммы направленности площади объекта при длинах волн спектра помехи существенно меньших геометрических размеров объекта. При этом обнаружение объекта и его отличие от объектов, находящихся на поверхности, определяют по отрицательной величине изменения суммарного сигнала во время нахождения объекта в пределах пространства диаграммы направленности.
Реализация предлагаемого способа осуществляется следующим образом.
С помощью антенны 1 (см. чертеж) и диаграммообразующего устройства 2 шумопеленгатора, расположенного на дне водоема, формируется диаграмма направленности с углом раствора γ Принятые диаграммой фоновые шумы, например, дальнего судоходства усиливаются усилителем 3, фильтруются по частоте (4), детектируются (5) и создают некоторый положительный уровень на входе пороговой съемы принятия решения 6, которая не реагирует на положительный сигнал. Одновременно недетектированные суммы сигнала и помех поступают на анализатор спектра 7. При попадании обнаруживаемого шумящего объекта 8 в зону диаграммы направленности 9 происходят два противоположных процесса: к фоновым шумам прибавляются аддитивно собственные шумы объекта и одновременно вследствие расположения объекта между источниками фоновых шумов и приемником происходит уменьшение уровня последних. Если шумы объекта малы по сравнению с шумами помехи, а диаграмма направленности (ее угол раствора g ) выбрана такой, что большая часть энергии помехи затеняется, что возможно еще при условии выбора длины волны диапазона фоновых помех, что существенно меньше геометрических размеров объекта, то сумма сигнала и помехи уменьшится, что на выходе схемы принятия решения 6 вызовет отрицательный перепад напряжения, который и будет означать фиксацию факта обнаружения малошумового объекта и то, что объект находится на глубине, потому что в противном случае эффекта затенения не будет, не будет и отрицательного перепада напряжения на входе схемы принятия решения.
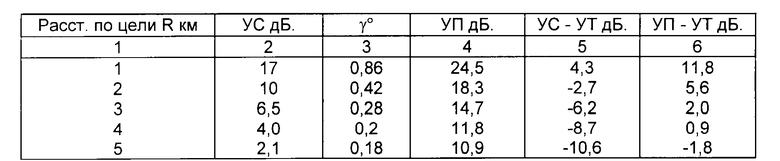
В таблице приведены расчетные данные для иллюстрации возможности способа. В качестве исходных для расчета данных использованы (1): уровень шумовой помехи от судоходства УП=70 дБ, шумов подводной лодки времен Второй мировой войны УС=76 дБ. имеющей длину 80 м и высоту 15 м. Частота выбрана 750 Гц, при которой длина волны в 7,5 раза меньше минимального размера объекта (15 м).
В таблице, в графе 2 приведены расчетные данные уровня сигнала цели на соответствующем строке 1 расстоянии, рассчитанном по сферическому, при котором уровень спадает как 20 lgR.
В графе 3 приведен угол раствора диаграммы направленности (g9733,94017510), рассчитанный из условия 95%-ного затенения сечения диаграммы направленности минимальным размером объекта. При этом уровень затенения соответствует УТ=10 lg Sз/Sнз 12,7 дБ, где Sз затененная часть сечения диаграммы направленности, Sнз незатененная часть сечения диаграммы.
В графе 4 приведен уровень помехи с учетом угла раствора диаграммы направленности, так как исходные данные по помехам соответствуют измерениям с помощью ненаправленного приемника.
В графе 5 приведена разность между уровнем сигнала (УС) и уровнем затенения (УГ).
В графе 6 приведена разность между уровнем помехи и уровнем затенения, т.е. оставшийся после затенения уровень помехи.
Сопоставление приведенных в таблице данных свидетельствует о следующем:
1. По мере увеличения расстояния до объекта его шумы вследствие сферического расширения фронта волны уменьшаются по уровню, причем улавливание шумового сигнала на расстоянии 4 км и более становится проблематичным.
2. Сопоставление данных граф 2 и 4 свидетельствует, что уровень сигнала всегда ниже уровня помехи, что еще более затрудняет выделение полезного сигнала на фоне помех. С увеличением расстояния соотношение сигнал/помеха ухудшается.
3. Данные в графе 5 характеризуют величину и знак изменения суммарного сигнала при обнаружении объекта. Как видим, с расстояния 2 км и более эта величина отрицательна и увеличивается по мере роста расстояния.
4. Сопоставление данных граф 2 и 6 свидетельствует о том, что уровень сигнала при наличии последнего в диаграмме направленности всегда превышает уровень помехи, оставшейся после затенения ее объектом, что означает возможность обнаружения и распознавания объекта по его собственным шумам.
Необходимо учитывать, что расчеты проведены для одной частоты. В случае использования полосы частот сигнала и помехи возможно решение задачи обнаружения и распознавания на больших расстояниях.
Реализация предлагаемого способа возможна на шумопеленгаторах при выборе частотного диапазона и угла раствора диаграммы направленности в соответствии с предлагаемым способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ И КООРДИНАТ ПОДВОДНОГО ОБЪЕКТА | 1993 |
|
RU2038615C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РЫБНЫХ КОСЯКОВ | 1994 |
|
RU2111509C1 |
| ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2106651C1 |
| СПОСОБ ПАВЛОВА Ю.К. ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РЫБНЫХ СКОПЛЕНИЙ В ВОДЕ | 1991 |
|
RU2029973C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА ИЗВЕСТНЫХ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ | 1993 |
|
RU2078353C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РЫБНЫХ СКОПЛЕНИЙ В ВОДЕ | 1992 |
|
RU2010263C1 |
| Способ классификации морских объектов на основе весовых коэффициентов их классификационных признаков | 2018 |
|
RU2687994C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| СПОСОБ ЦВЕТОВОГО КОДИРОВАНИЯ ИНФОРМАЦИИ ГИДРОАКУСТИЧЕСКОГО ШУМОПЕЛЕНГОВАНИЯ | 2015 |
|
RU2593621C1 |
Изобретение относится к гидроакустике. Изобретение позволяет реализовать обнаружение слабошумящих подводных объектов на фоне шумов высокого уровня и отличать подводные объекты от наводных. Прием слабых сигналов и шумовых помех осуществляют с помощью шумопеленгатора, имеющего раствор характеристики направленности таким, чтобы сечение площади последней было примерно равным геометрической площади обнаруживаемого объекта, а частотный спектр должен содержать длины волн, существенно меньшие, чем размеры объекта. Обнаружение подводного объекта и отличие его от наводных определяется по отрицательной величине изменения суммарного сигнала на выходе детектора 1 з.п. ф-лы, 1 ил. 1 табл.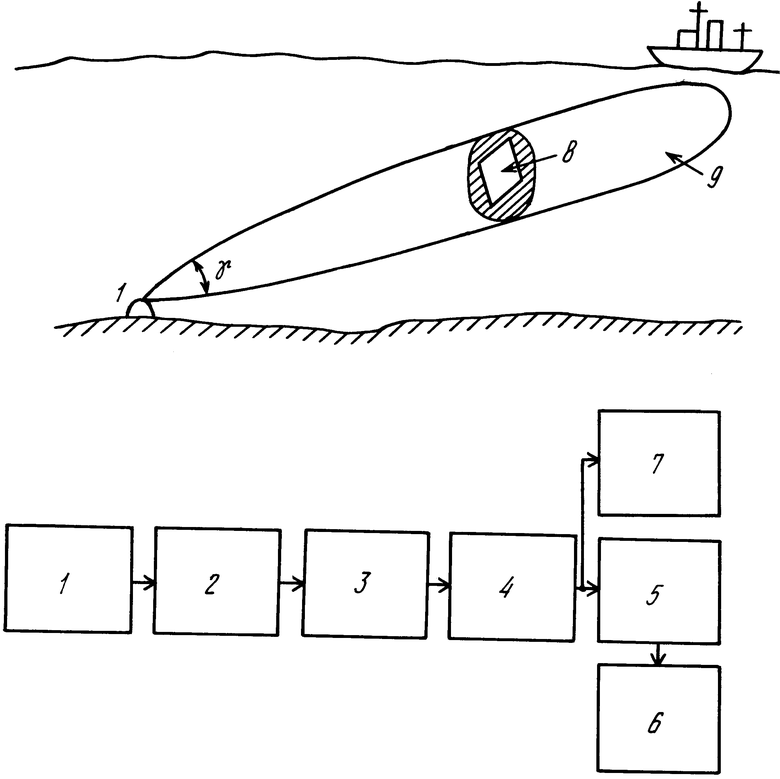
| Роберт Дж.Урик | |||
| Основы гидроакустики | |||
| - Л.: Судостроение, 1978, с | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
