Изобретение относится к гидроакустике, в частности к определению направления движения рыбных косяков и других подводных объектов и их параметров гидроакустическими методами.
Известен способ обнаружения кильватерного следа, основанный на ослаблении сигнала между излучателем и приемником, вызванного затенением приемника кильватерным следом [1]
Недостатком этого способа применительно к обнаружению рыбных скоплений является невозможность определения направления движения рыбных скоплений.
Наиболее близким к изобретению является способ определения плотности рыбных скоплений по ослаблению гидроакустического сигнала между приемником и излучателем при проходе между ними рыбных скоплений [2] Способ включает непрерывное излучение акустических сигналов в водную среду, прием их на некотором расстоянии от источника излучения, измерение интегральной величины принятого сигнала, по изменению величины принятого сигнала, т.е. по степени "затенения" судят о наличии рыбного скопления и его плотности.
Однако данный способ также не позволяет определить направление движения рыбных скоплений и имеет недостаточную точность определения координат рыбного скопления относительно приемного устройства.
Предлагаемое изобретение направлено на решение задачи определения направления движения рыбных косяков и других подводных объектов, движущихся в контролируемом пространстве, и оценки их координат.
Для этого в способе определения направления движения и координат подводного объекта, включающем излучение акустического сигнала в объем воды, прием его с помощью приемника, расположенного на некотором расстоянии от источника излучения, измерение величины изменения сигнала, вызванного появлением в контролируемом пространстве подводного объекта, например рыбного косяка, фиксируют моменты времени и последовательность появления и исчезновения этого изменения в различных диаграммах направленности приемника, а по последовательности его появления и исчезновения и по продолжительности действия измененного уровня принимаемого акустического сигнала определяют последовательность, время и направление прохождения подводным объектом пространственных зон диаграмм направленности приемника. Диаграммы направленности приемника формируют соосными и с наклоном оси относительно вертикали. Направление движения подводного объекта определяют по соотношению отрезков времени действия измененного уровня принимаемого сигнала, отсчитанных от момента начала изменения уровня в наиболее широкой диаграмме направленности до момента начала изменения уровня в каждой последующей более узкой диаграмме направленности, к отрезкам времени, отсчитанным от момента возвращения измененного уровня сигнала к исходному в каждой диаграмме направленности меньшего угла раствора до аналогичного момента вращения в ближайшей более широкой диаграмме направленности приемником, при отрицательной разности этих отрезков объект движется в направлении наклона оси диаграммы направленности, при положительной разности в противоположном направлении.
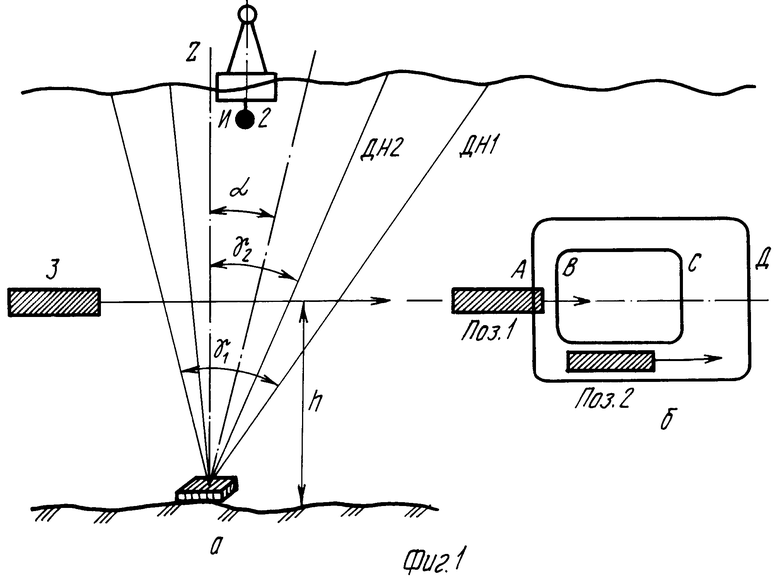
На фиг. 1а представлены диаграммы направленности и положение объекта при их пересечении; на фиг. 1б сечение диаграмм направленности горизонтальной плоскостью. На фиг. 1а и б показаны гидрофон 1, широкополосный излучатель 2, объект 3, Z вертикаль, ДН1, ДН2 диаграммы направленности, α- угол отклонения оси диаграмм направленности, γ1, γ2 углы раствора диаграмм направленности, h глубина нахождения объекта, АВ и СД расстояния между двумя соседними диаграммами направленности.
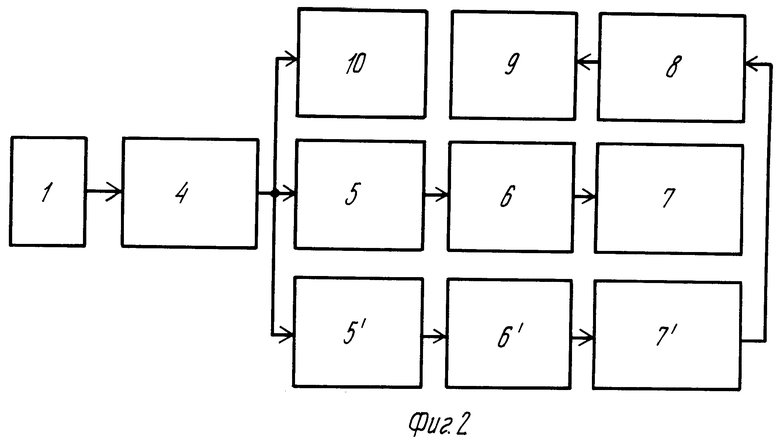
На фиг. 2 представлена блок-схема устройства для реализации предложенного способа, содержащая гидрофон 1, усилитель 4, полосовые фильтры 5 и 5', детекторы 6 и 6', схемы 7 и 7' формирования, электронный секундомер 8, устройство 9 памяти и анализатор 10 спектра.
Осуществление предлагаемого способа возможно с помощью приведенных на фиг. 1 и 2 устройств. На дне водоема размещается плоский квадратный гидрофон 1 рабочей поверхностью к поверхности водоема. Над гидрофоном располагают широкополосный излучатель 2, с помощью гидрофона 1 формируют не менее 2-х диаграмм направленности с углами раствора γ1, γ2, причем γ1 ≠γ2. Общая ось диаграмм направленности наклонена и составляет с вертикалью Z угол α. На глубине нахождения объекта 3 сечения диаграмм направленности гидрофона 1 представляют собой почти прямоугольники (фиг. 1б), из которых внутренний смещен по отношению к внешнему вследствие наклона оси диаграмм так, что АВ < СД.
Излучатель 2 излучает в водную среду непрерывные колебания в широкой полосе частот, которые после приема гидрофоном 1 и преобразования их в электрические сигналы усиливаются широкополосным усилителем 4 и поступают на полосовые фильтры 5 и 5', центральные частоты которых соответствуют каждой диаграмме направленности. С фильтров сигналы поступают на детекторы 6 и 6', с помощью которых выделяется их огибающая, которая представляет отрицательный импульс, соответствующий по времени эффекту "затенения" при наличии объекта в диаграммах направленности. С помощью схем 7 и 7' формирования осуществляется усиление, ограничение по амплитуде и формирование кратковременных импульсов, соответствующих переднему и заднему фронту сигнала "затенения". С помощью этих импульсов запускается и останавливается электронный секундомер 8, причем запускается передним фронтом импульса диаграммы направленности ДН1 и останавливается передним фронтом импульса ДН2, тем самым измеряется время, соответствующее отрезку АВ, его величина записывается в устройство 9 памяти. Повторно секундомер запускается задним фронтом импульса диаграммы ДН2 и останавливается задним фронтом диаграммы ДН1, при этом измеряется время, соответствующее отрезку СД, которое в устройстве памяти вычитается из времени, соответствующего отрезку АВ, и по знаку результата определяется направление движения объекта. Знак "-" соответствует (фиг. 1б) направлению вправо, знак "+" направлению влево. В течение всего времени прохождения объектом пространства диаграмм на анализаторе 10 спектра наблюдается динамика появления и исчезновения сигналов затенения в каналах ДН1, ДН2 и по результатам определяется положение объекта относительно оси.
Приведенные выше функции, решаемые устройством, могут быть выполнены с помощью стандартных цифровых схем или процессора, если после детектора включить аналого-цифровые преобразователи (АЦП) и реализовать все функции с помощью элементарной вычислительно-логической программы.
В качестве примера приводятся расчетные данные для устройства определения направления движения подводного объекта.
П р и м е р. Исходные данные: глубина места 300 м, скорость объекта 4 м/с, частоты 14 и 16 кГц, наклон оси к вертикали 10о, глубина объекта 40 и 175 м. Время прохождения отрезка АВ для глубин 40 и 175 м составляет 11 и 5 с соответственно, для отрезка СД для тех же глубин 22 и 10 с. Как видно, время существенно различается для разных отрезков и глубин.
Предлагаемый способ может быть применен в устройствах для обнаружения в водной среде и определения параметров движения подводных объектов: рыбных косяков, подводных аппаратов различного назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РЫБНЫХ СКОПЛЕНИЙ В ВОДЕ | 1992 |
|
RU2010263C1 |
| СПОСОБ ПАВЛОВА Ю.К. ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РЫБНЫХ СКОПЛЕНИЙ В ВОДЕ | 1991 |
|
RU2029973C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РЫБНЫХ КОСЯКОВ | 1994 |
|
RU2111509C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА ИЗВЕСТНЫХ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ | 1993 |
|
RU2078353C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И ОЦЕНКИ ИХ МЕСТОПОЛОЖЕНИЯ | 1994 |
|
RU2097786C1 |
| СПОСОБ АКУСТИЧЕСКОГО МОНИТОРИНГА ИЗМЕНЧИВОСТИ ПАРАМЕТРОВ МОРСКИХ АКВАТОРИЙ | 1997 |
|
RU2134432C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2365938C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2366973C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
Использование: гидроакустические устройства, предназначенные для определения направления и координат подводных объектов. Сущность изобретения: акустический сигнал излучают в объем воды с помощью приемника, расположенного на некотором расстоянии от источника, регистрируют изменение уровня сигнала при приеме, вызванное появлением в контролируемой зоне подводного объекта. При этом фиксируют моменты и последовательность появления и исчезновения этого изменения в различных диаграммах направленности приемника. По последовательности появления, исчезновения и продолжительности измененного сигнала определяют время, последовательность и направление движения подводного объекта. 1 з.п. ф-лы, 2 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Мельников В.Н | |||
| и др | |||
| Рыбное хозяйство | |||
| М., N 8, 1977, с.64-66. | |||
