Изобретение относится к машиностроению и может быть использовано в авиационной и космической технике в составе электроприводов систем автоматики, а также в других отраслях техники.
Известен волновой сервомеханизм содержащий корпус с гибким и жестким колесами и волнообразователь, связанный с валом электродвигателя, а также датчик обратной связи в виде потенциометра (см. Атлас конструкций элементов приборных устройств под ред. О. Ф. Тищенко, М. : Машиностроение, 1982, с. 57, л. 30, рис. 4). Недостатком такого волнового сервомеханизма является его низкая точность, что вызвано использованием аналогового датчика положения, а также трудность его использования в системах автоматического регулирования, управляемых цифровыми вычислительными машинами.
Этого недостатка лишен волновой сервомеханизм, содержащий гибкое и жесткое колеса и волнообразователь, в корпусе которого размещены приводные цилиндры, штоки которых взаимодействуют с гибким колесом, а полости соединены с распределителями, а также узлы управления и датчики обратной связи. Датчики обратной связи выполнены в виде электромагнитных датчиков положения штока приводного цилиндра.
Недостатком этого волнового сервомеханизма является его низкая точность, что вызвано влиянием эксцентриситета между волнообразователем и жестким колесом, неизбежно возникающего в процессе эксплуатации вследствие деформаций конструкции механизма от внешних сил, износа, неточностей сборки. Кроме того, недостатками прототипа являются значительная сложность конструкции и значительные габариты, вызванные необходимостью размещения датчиков обратной связи внутри гибкого колеса и волнообразователя.
Целью изобретения является повышение точности за счет устранения влияния эксцентриситета между волнообразователем и жестким колесом, упрощение конструкции и сокращение габаритов.
Для достижения поставленной цели в известном волновом сервомеханизме, содержащем гибкое и жесткое колеса и волнообразователь, в корпусе которого размещены приводные цилиндры, штоки которых взаимодействуют с гибким колесом, а полости соединены с узлами управления, а также датчики обратной связи, согласно изобретению, датчики обратной связи выполнены в виде датчиков кривизны размещенных на поверхности гибкого колеса, при этом гибкое колесо выполнено с возможностью радиального перемещения в зоне зацепления. Признаки, отличающие предложенное решение от прототипа, позволяют сделать вывод о его соответствии критерию "новизна". Указанная совокупность существенных признаков ранее авторам не встречалась. Так как эти признаки позволяют получить положительный эффект, а именно повышения точности за счет устранения влияния эксцентриситета между волнообразователем и жестким колесом, упрощение конструкции и сокращение габаритов, то предложенное решение соответствует и критерию "существенные отличия".
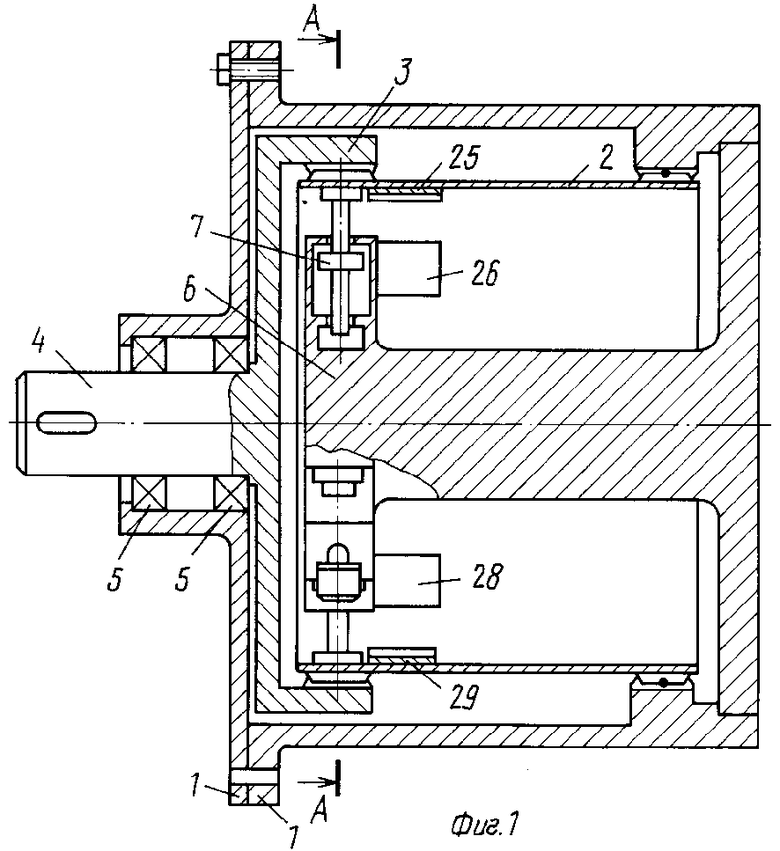
На фиг. 1 изображен волновой сервомеханизм, продольный разрез (пример конкретного выполнения); на фиг. 2 - разрез А-А на фиг. 1.
Волновой сервомеханизм содержит корпус 1, в котором установлено неподвижное гибкое колесо 2 и жесткое колесо 3, выполненное заодно с валом 4, который размещен в подшипниках 5 корпуса. В корпусе также установлен волнообразователь 6, в котором размещены радиально и равномерно по окружности приводные цилиндры 7-14, штоки которых взаимодействуют с гибким колесом 2, а полости соединены с узлами управления 15-22, выполненными в виде электрогидравлических усилителей, связанных через усилители мощности (из которых изображен усилитель 23) с задатчиком (не показан). Сервомеханизм снабжен сравнивающими сумматорами по числу цилиндров (изображен сумматор 24), а также датчиками обратной связи, которые выполнены в виде тензометрических датчиков кривизны 25-32, размещенных на внутренней поверхности гибкого колеса у зоны зацепления. Угловое положение датчиков такое же, как и положение приводных цилиндров, т. е. каждый датчик и соответствующих ему приводной цилиндр размещены в одной плоскости продольного сечения сервомеханизма. Выход каждого датчика соединен с одним из входов сумматора, управляющего приводным цилиндром, находящимся в том же продольном сечении, что и датчик. Гибкое колесо выполнено с возможностью радиального перемещения в зоне зацепления, что обеспечивается применением в качестве опоры шлицевого соединения колеса с корпусом. Выход каждого сумматора подключен через усилитель к узлу управления. Каждая пара противоположно расположенных цилиндров 7 и 11, 8 и 120 9 и 13, 10 и 14 образует одну фазу, поэтому входы соответствующих сумматоров объединены, входы сумматоров перпендикулярно расположенных цилиндров 7 и 9, 13 соединены через инвертор 33, а цилиндров 8 и 10, 14 соединены через инвертор 34. Датчики 25-32 подключены к генератору опорного напряжения. Цилиндры 7 и 11 образуют I фазу, цилиндры 8 и 12 - II фазу, цилиндры 9 и 13 образуют III фазу, цилиндры 10 и 14 - IV фазу.
Волновой сервомеханизм работает следующим образом. В режиме аналогового управления при подаче от задатчика синусоидальных сигналов, сдвинутых друг относительно друга на четверть периода, на входы сумматора I и II фаз сигналы рассогласования поступают на узлы управления 15, 19 и 16, 20. Узлы управления в соответствии со значением сигнала рассогласования формируют перепад давления в полостях цилиндров 7, 11 и 8, 12, штоки которых деформируют гибкое колесо 2, обеспечивая зацепление колес 2 и 3. Одновременно штоки цилиндров 9, 13 и 10, 14 III и IV фаз перемещаются в противоположных направлениях, так как сигналы на их сумматоры поступают через инверторы 33 и 34. В результате волна дефоромации плавно перемещается по окружности гибкого колеса 2, а измерение сигнала рассогласования каждого цилиндра обеспечивает точную отработку сигнала задатчика за счет регулирования хода и усилия штока каждого цилиндра. Сигнал обратной связи снимается с датчика кривизны так как каждому положению гибкого колеса соответствует свое значение кривизны поверхности колеса в месте установки датчика и, соответственно, величина сигнала обратной связи датчика. При этом сигнал обратной связи снимается непосредственно с гибкого колеса, и вырабатываемый сумматором сигнал рассогласования показывает отличие требуемой в данный момент формы деформации гибкого колеса от реально существующей, т. е. обеспечивается непосредственное управление выходным параметром - формой гибкого колеса и соответствующим этой форме положением жесткого колеса. В прототипе же сигнал обратной связи снимается со штока приводного цилиндра, что при всегда присутствующей несоосности волнообразователя и жесткого колеса (вызванного погрешностями изготовления деталей и сборки, а также деформациями узлов механизма от внешних нагрузок, вибраций и т. д. ) вызывает погрешности в управлении (так как сигнал рассогласования должен учитывать разность в положениях штока и жесткого колеса, а в прототипе учитывается только положение штока без учета реального смещения осей волнообразователя и жесткого колеса). При работе в дискретном режиме на фазе I и II подаются дискретные сигналы, что приводит к дискретным перемещениях жесткого колеса.
В результате использования изобретения повышается точность сервомеханизма за счет устранения влияния эксцентриситета между волнообразователем и жестким колесом.
Рассмотрим повышение точности отработки сигнала жестким колесом в предложенном механизме по сравнению с прототипом. При указанной несоосности, например, 0,4 мм, при полностью отработанных в соответствии с показаниями датчиков обратной связи управляющих сигналах ее следствием будет то, что шток максимально выдвинутого цилиндра (в прототипе) будет поджат с большим усилием, а шток противоположного цилиндра не дойдет до положения, при котором будет обеспечено полное зацепление колес, на величину этой несоосности h = 0,4 мм. Это приводит к образованию увеличенных боковых зазоров с каждой стороны зубьев гибкого колеса, величина которых в тангенциальном направлении составит (с каждой стороны)
L = h x tg A,
где А - угол зацепления зубчатой передачи (стандартная величина для волновых передач 30 градусов). Наличие этих зазоров дает возможность жесткому колесу поворачиваться в пределах этих зазоров на угол B = 2L : D, где D - расстояние до мгновенного центра вращения, в данном случае - делительный диаметр гибкого колеса, примем его равным 100 мм. Тогда величина угла составит
В = 2h x tg30 * 57-3 : 100 = 0,265 [градусов] = 16'
В предложенном же сервомеханизме штоки цилиндров останавливаются по достижении гибким колесом заданной формы деформации, при этом за счет возможности качания гибкого колеса в шлицевом соединении происходит самоустановка гибкого колеса по жесткому вне зависимости от наличия и величины несоосности между осями жесткого колеса и волнообразователя. Форма же деформации сечения гибкого колеса в зоне зацепления не меняется. Вследствие этого не возникает указанных выше зазоров с одной стороны зацепления и натягов с другой, повышается точность, выравниваются контактные напряжения в зубчатом зацеплении и за счет этого увеличивается ресурс гибкого колеса. Повышение точности, как было указано, составляет величину порядка 16 мин. Кроме того, упрощается конструкция и сокращаются габариты, что обеспечивается за счет упрощения конструкции волнообразователя (устранение датчиков, находящихся в жидкостных полостях и имеющих подвижные элементы. Все вышеуказанные преимущества позволяют рекомендовать предложенное изобретение к использованию в изделиях авиационной и космической техники, где вопросы повышения точности, надежности и снижения габаритно-массовых характеристик имеют первостепенное значение. (56) Авторское свидетельство СССР N 1224468, кл. F 16 H 1/00, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШЕСТЕРЕННЫЙ НАСОС | 1991 |
|
RU2027909C1 |
| РЕЛЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2033988C1 |
| РУЛЕВОЙ ПРИВОД | 1991 |
|
RU2014246C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 1991 |
|
RU2011036C1 |
| ПЛАНЕТАРНЫЙ ПРИВОД | 1991 |
|
RU2011065C1 |
| ДАТЧИК РАЗНОСТИ ДАВЛЕНИЙ | 1992 |
|
RU2029934C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ ПО ДВУХПРОВОДНОЙ ЛИНИИ СВЯЗИ | 1991 |
|
RU2022369C1 |
| ЗУБЧАТЫЙ РЕДУКТОР | 1985 |
|
RU2089766C1 |
| РЕЗЕРВИРОВАННЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1991 |
|
RU2006921C1 |
| ДИСПЕРГАТОР | 1992 |
|
RU2032457C1 |
Использование: в авиационной и космической технике в составе электрогидравлических приводов систем автоматики. Сущность изобретения: в корпусе установлено неподвижное гибкое колесо и жесткое колесо, выполненое заодно с валом, который размещен в подшипниках корпуса. В корпусе установлен волнообразователь, в котором размещены радиально и равномерно по окружности приводные цилиндры 7 - 14 штоки которых взаимодействуют с гибким колесом, а полости соединены с электрогидравлическими усилителями 15 - 22. На внутренней поверхности гибкого колеса 2 размещены тензометрические датчики 25 - 32 кривизны. Каждая пара противоположно расположенных цилидров 7 и 11, 8 и 12, 9 и 13, 10 и 14 образует одну фазу. Датчики 25 - 32 подключены к генератору опорного напряжения. Электрогидравлические усилители 15 - 22 в соответствии с сигналами рассогласования формируют перепад давления в цилиндрах 7, 11 и 8, 12, штоки которых деформируют гибкое колесо, обеспечивая зацепление гибкого и жесткого колес, а штоки цилиндров 9, 13 и 10, 14 перемещаются в противоположных направлениях. В результате волна деформации перемещается по окружности гибкого колеса. Штоки цилиндров останавливаются по сигналам датчиков 25 - 32 по достижении гибким колесом заданной формы деформации. 2 ил.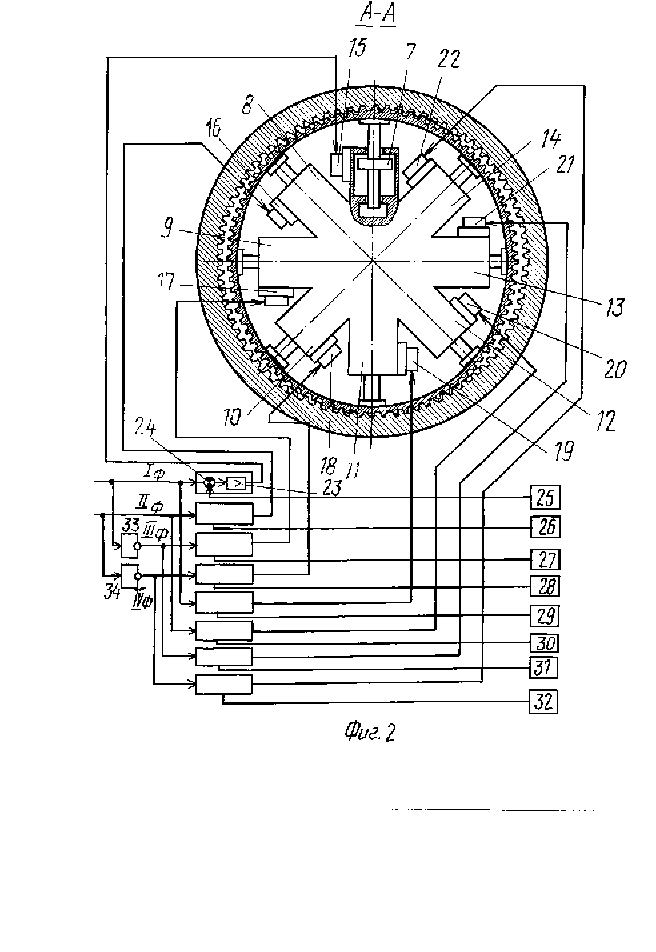
ВОЛНОВОЙ СЕРВОМЕХАНИЗМ, содержащий гибкое и жесткое колеса, находящиеся в зацеплении и установленные на опорах в корпусе, и волнообразователь, в котором радиально размещены приводы, каждый из которых включает последовательно соединенные сумматор, электрогидравлический усилитель и приводной цилиндр, а также датчик обратной связи, подключенный к сумматору, отличающийся тем, что, с целью повышения точности путем устранения влияния эксцентриситета между волнообразователем и жестким колесом, датчики обратной связи выполнены в виде датчиков кривизны и установлены на внутренней поверхности гибкого колеса, а опора последнего в корпусе выполнена в виде шлицевого соединения с радиальным зазором в зоне зацепления.
