Изобретение относится к машиностроению и может быть использовано в составе приводов регуляторов и дросселей агрегатов ракетно-космической техники.
Известен планетарный привод, содержащий корпус, установленные в нем электродвигатель и планетарную передачу, а также выходной вал, соединенный с водилом передачи. Однако этот планетарный привод имеет недостаточную технологическую надежность, вызванную отсутствием в конструкции возможности регистрации положения выходного вала, что требуется по условиям применения.
В основу изобретения положена задача повышения технологической надежности.
Для решения указанной задачи планетарный привод, содержащий корпус, установленные в нем электродвигатель и планетарную передачу, водило которой связано с выходным валом, снабжен датчиками положения, входящими в зацепление с зубчатым колесом, установленным на водиле, причем датчики положения размещены от водила со стороны, противоположной электродвигателю.
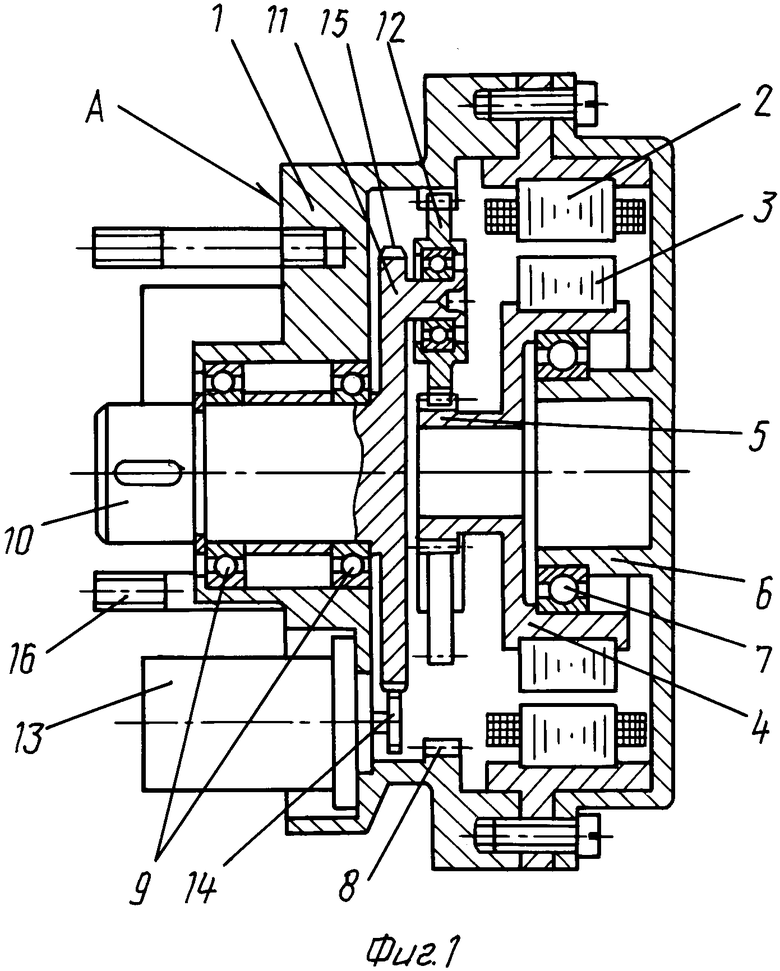
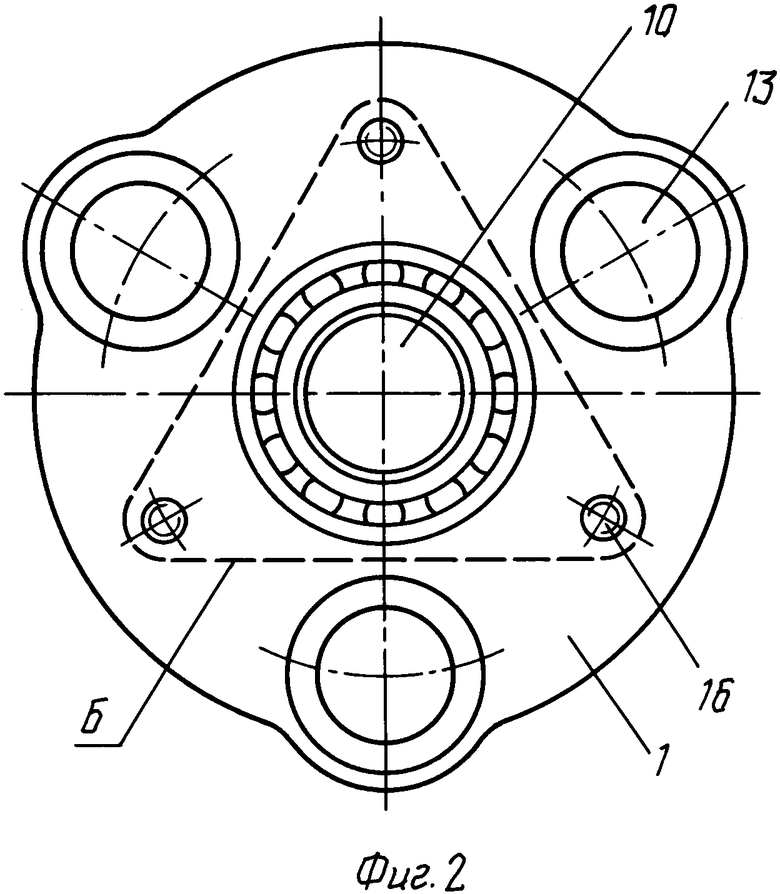
На фиг. 1 приведена иллюстрация конкретного выполнения планетарного привода, продольный разрез; на фиг. 2 - то же, вид на фланце привода.
Планетарный привод содержит корпус 1 и установленный в нем электродвигатель со статором 2 и ротором 3. Электродвигатель выполнен моментным с кольцевым ротором, ротор 3 установлен на ступице 4, на той же ступице выполнено плавающее центральное колесо 5 планетарной передачи. На корпусе выполнен палец 6, входящий внутрь ступицы 4, при этом ступица 4 установлена на пальце 6 при помощи подшипника 7. На корпусе 1 выполнено также неподвижное зубчатое колесо 8 и на подшипниках 9 установлен выходной вал 10. На валу 10 выполнено водило 11 с тремя сателлитами 12. Колеса 5 и 8 вместе с водилом 11 и сателлитами 12 образуют планетарную передачу. На корпусе 1 также установлены три датчика 13 положения выходного вала 10, связанные с ним при помощи зубчатой передачи между шестернями 14 датчиков и зубчатым колесом 15, выполненным на водиле 11. Корпус снабжен тремя крепежными шпильками 16, установленными на привалочной плоскости А. Планетарный привод работает следующим образом.
При подаче электропитания на статор 2 моментного электродвигателя его кольцевой ротор 3 начинает вращаться относительно продольной оси привода на подшипнике 7, установленном на пальце 6. При этом приходит во вращение ступица 4, в которую завальцован ротор 3 электродвигателя. Плавающее центральное колесо 5, выполненное на ступице 4, приводит в движение сателлиты 12 и посредством их взаимодействия с неподвижным зубчатым колесом 8 заставляет вращаться водило 11 и выходной вал 10. Выходной вал также приводит в движение шестерни 14 датчиков 13, связанные с колесом 15 через зубчатую передачу. Датчики 13 выдают в систему управления (не показана) сигналы о положении вала 10.
Расположение датчиков позволяет снижать габариты привода 4, расстояние от центра масс до привалочной плоскости. Так, в реальном приводе оно составляет 60 м. При этом центр масс находится на расстоянии 24 мм левее привалочной плоскости. Расположение датчиков 13 правее привалочной плоскости не приводит к отрицательным явлениям при компоновке привода на изделие, т. к. это происходит в зоне, свободной от арматуры. Принято в ракетной технике фланцы для крепления приводов обычно имеют форму, показанную пунктиром линией Б на фиг. 2 (см. например, ОСТ92-0701-71). Такое размещение датчиков позволяет обеспечить минимально возможное расстояние от привалочной плоскости привода до его центра масс, что позволяет снизить нагрузку на крепежные шпильки и снизить их диаметр, а также уменьшить (за счет уменьшения расстояния до центра масс) инерционные нагрузки. Кроме того, размещение датчиков в районе привалочной плоскости резко снижает виброперегрузки на датчике, что позволяет устранить дребезг контактов в датчиках, вызываемый высоким уровнем вибраций, характерным для ракетно-космической техники. (56) Авторское свидетельство СССР N 1163078, кл. F 16 M 1/48, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШЕСТЕРЕННЫЙ НАСОС | 1991 |
|
RU2027909C1 |
| РЕДУКТОР ДЛЯ ЭЛЕКТРОПРИВОДА | 1992 |
|
RU2039897C1 |
| ВОЛНОВОЙ СЕРВОМЕХАНИЗМ | 1991 |
|
RU2011062C1 |
| ДАТЧИК РАЗНОСТИ ДАВЛЕНИЙ | 1992 |
|
RU2029934C1 |
| ОСЕВОЙ ВЕНТИЛЯТОР | 1991 |
|
RU2011890C1 |
| УСТРОЙСТВО ДЛЯ СООБЩЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 1988 |
|
RU2065542C1 |
| БЛОК ВЕНТИЛЯТОРОВ | 1991 |
|
RU2009376C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 1991 |
|
RU2011036C1 |
| ЗУБЧАТЫЙ РЕДУКТОР | 1985 |
|
RU2089766C1 |
| Волновой привод | 1990 |
|
SU1770640A1 |
Использование: в составе приводов изделий ракетной техники, а также и других областях техники. Сущность изобретения: планетарный привод содержит корпус с привалочной плоскостью , установленные в нем электродвигатель и планетарную передачу, водило которой жестко связано с выходным валом , а также датчики положения, входящие в зацепление с зубчатым колесом, установленным на выходном валу. Зубчатое колесо размещено на водиле, а датчики положения размещены со стороны привалочной плоскости противоположно электродвигателю. Привод компактен и надежен в эксплуатации. 2 ил.
ПЛАНЕТАРНЫЙ ПРИВОД, содержащий корпус, установленные в нем электродвигатель и планетарную передачу, водило которой связано с выходным валом, отличающийся тем, что он снабжен датчиками положения, входящими в зацепление с зубчатым колесом, установленным на водиле, причем датчики положения размещены от водила со стороны, противоположной электродвигателю.
