Изобретение относится к технике автоматического регулирования и может найти применение в системах управления стабилизацией углового движения инерционных объектов, в частности в системах управления ориентацией упругих космических аппаратов (КА), например, аппаратов с упругими выносными элементами конструкции: панелями солнечных батарей (СБ), антеннами, штангами и т. п.
Известные устройства [1,2] содержат трехпозиционный релейный элемент с гарантированной зоной нечувствительности. Однако точность систем угловой стабилизации с такими регуляторами недостаточно велика.
Наиболее близкой к предложенной является релейная система управления [3] содержащая первый нелинейный усилитель, корректирующий блок, выход которого соединен с первым входом первого сумматора, второй вход которого соединен с выходом блока рассогласования, а выход соединен с первым входом второго нелинейного усилителя, второй сумматор, первый вход которого соединен с выходом первого инвертора знака сигнала, а выход с входом корректирующего блока, блок формирования порогового сигнала, выход которого соединен с вторым входом второго нелинейного усилителя, последовательно соединенные усилитель-преобразователь, исполнительные органы, установленные вместе с блоком рассогласования на инерционном объекте, два элемента И и два элемента НЕ, причем выход блока рассогласования соединен с первым входом первого нелинейного усилителя, второй вход которого соединен с выходом блока формирования порогового сигнала, а выход с входом первого элемента НЕ, и первым входом первого элемента И, второй вход которого соединен с выходом второго нелинейного усилителя и входом второго элемента НЕ, выход которого соединен с первым входом второго элемента И, второй вход которого соединен с выходом первого элемента НЕ, а выход с вторым входом второго сумматора и первым входом усилителя-преобразователя, второй вход которого соединен с выходом первого элемента И и входом первого инвертора знака сигнала.
Недостатком известного устройства является возможность захвата регулятора упругими колебаниями. При этом амплитуда колебаний по углу превышает размер гистерезиса релейной характеристики нелинейного усилителя и могут возникнуть условия, когда энергия при работе исполнительных органов стабилизации расходуется на поддержание незатухающих упругих колебаний объекта (так называемый "захват" колебаниями регулятора).
Техническим результатом изобретения является устранение указанного недостатка при сохранении заданной точности, обеспечиваемой релейной системой управления прототипом.
Технический результат достигается тем, что в релейную систему управления, содержащую первый нелинейный усилитель, корректирующий блок, выход которого соединен с первым входом первого сумматора, второй вход которого соединен с выходом блока рассогласования, а выход соединен с первым входом второго нелинейного усилителя, второй сумматор, первый вход которого соединен с выходом первого инвертора знака сигнала, а выход с входом корректирующего блока, блок формирования порогового сигнала, выход которого соединен с вторыми входами первого и второго нелинейных усилителей, последовательно соединенные усилитель-преобразователь, исполнительные органы, установленные вместе с блоком рассогласования на инерционном объекте, два элемента И и два элемента НЕ, причем выход первого нелинейного усилителя соединен с входом первого элемента НЕ и первым входом первого элемента И, второй вход которого соединен с выходом второго нелинейного усилителя и входом второго элемента НЕ, выход которого соединен с первым входом второго элемента И, второй вход которого соединен с выходом первого элемента НЕ, а выход с вторым входом второго сумматора и первым входом усилителя-преобразователя, второй вход которого соединен с выходом первого элемента И и входом первого инвертора знака сигнала, дополнительно введены последовательно соединенные второй инвертор знака сигнала, вход которого соединен с выходом корректирующего блока, и третий сумматор, второй вход которого соединен с выходом блока рассогласования, а выход со входом первого нелинейного усилителя.
Причинно-следственная связь между совокупностью вышеуказанных существенных признаков и достигаемым результатом заключается в том, что в релейной системе при отклонениях объекта управления, возникающих, например, при упругих колебаниях выносных элементов конструкции и т.п. формируется динамически расширяющаяся зона нечувствительности. При этом величина зоны нечувствительности тем больше, чем больше отклонение, следовательно, и длительность нахождения объекта за пределами зоны нечувствительности. Благодаря этому формируются благоприятные условия для демпфирования колебаний объекта и его упругих элементов конструкции. После гашения колебаний размер зоны нечувствительности уменьшается до заданного расчетного значения и обеспечивается требуемая точность по угловому рассогласованию.
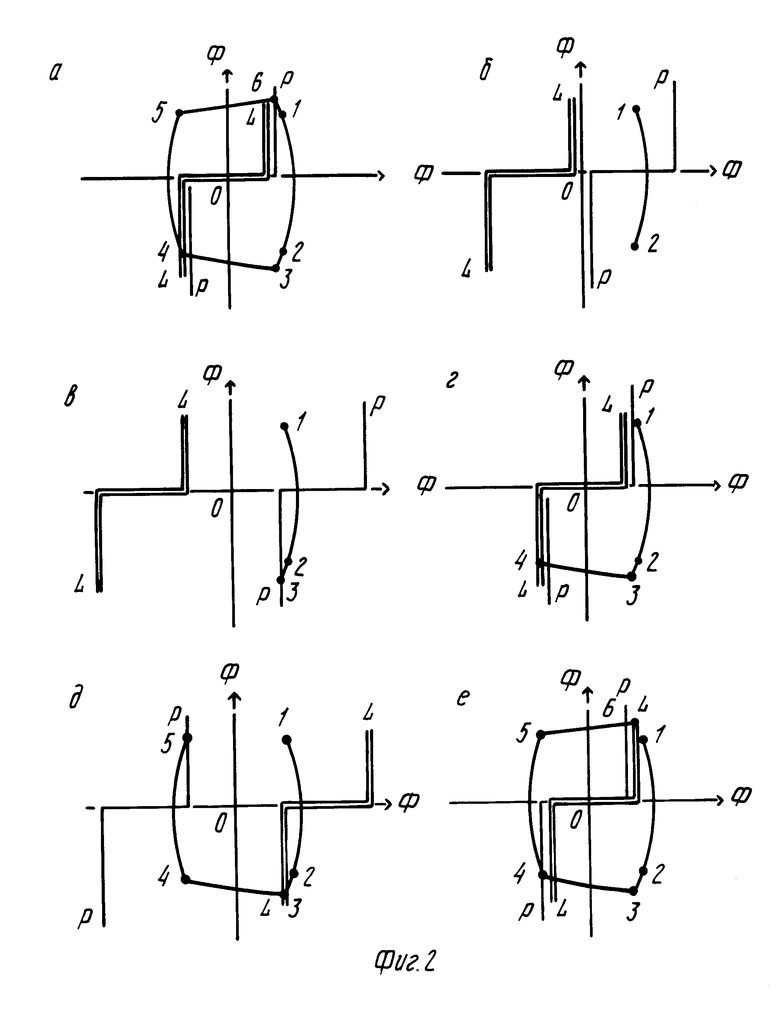
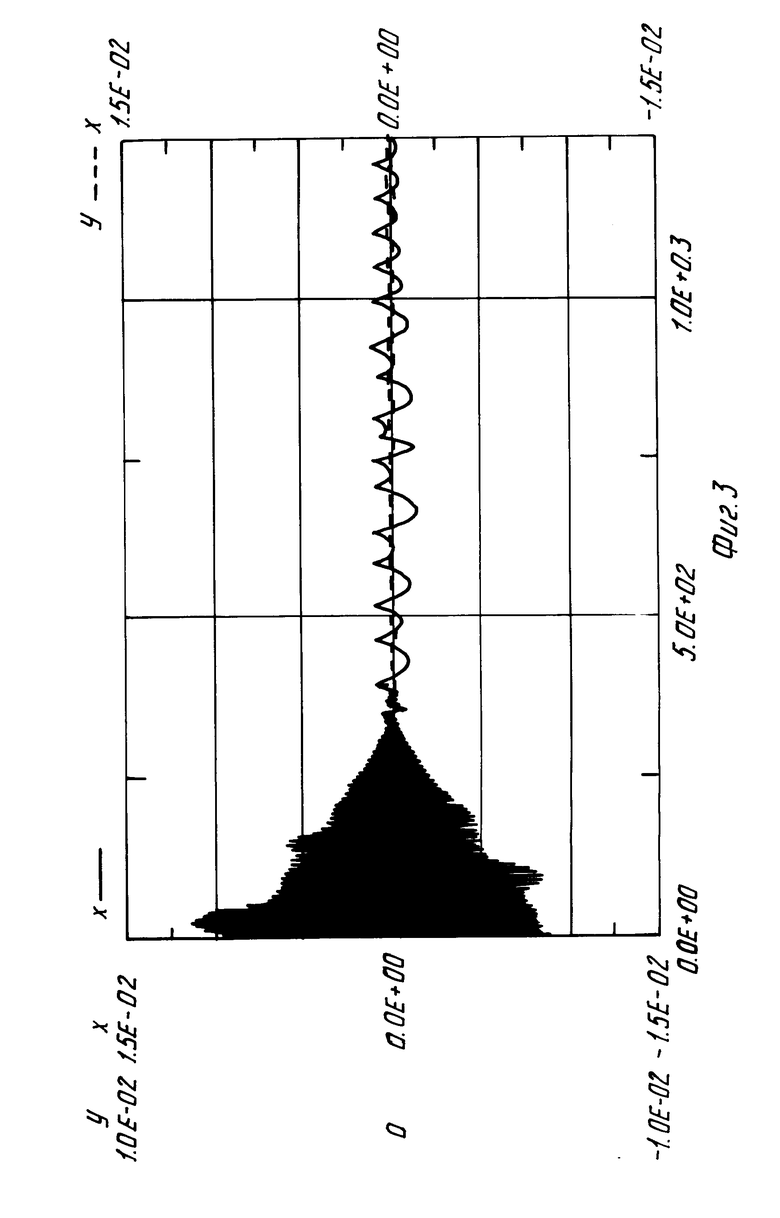
На фиг.1 представлена структурная схема системы угловой стабилизации инерционного объекта; на фиг.2,а-е показана последовательность формирования предельного цикла колебаний объекта при реализации системы; на фиг.3 осциллограмма переходного процесса гашения упругих колебаний при работе предлагаемой релейной системы управления (х угол, y угловая скорость объекта с упругими выносными элементами конструкции; задавалась начальная амплитуда упругих колебаний по углу, превышающая гистерезис релейной характеристики первого и второго нелинейных усилителей).
Схема включает в себя блок рассогласования 1, блок 2 формирования порогового сигнала, третий 3 и первый 4 сумматоры, первый 5 и второй 6 нелинейные усилители, первый 7 и второй 8 логические элементы НЕ, первый 9 и второй 10 логические элементы И, второй сумматор 11, корректирующий блок 12, второй 13 и первый 14 инверторы знака сигнала, усилитель-преобразователь 15, исполнительный орган 16, инерционный объект 17.
Система работает следующим образом.
Уровень порогового сигнала, формируемого блоком 2, отображается на фазовой плоскости (в координатах "угол" Φ, "угловая скорость"Φ') линиями переключения L-L' для первого нелинейного усилителя 5 и P-P' для второго нелинейного усилителя 6. Так как на вторые входы первого 5 и второго 6 нелинейных усилителей поступает один и тот же пороговый сигнал с выхода блока 2, то линии переключения P-P' и L-L' (правее которых формируются сигналы L5 1 и L6 1 и левее которых формируются сигналы L5 0 и L6 0) при нулевом значении корректирующего сигнала L12 на выходе блока 12 совпадают: L с P и L' с P'.
Разность между угловыми положениями объекта, соответствующими этим линиям, равна величине гистерезиса h=Φ(P)-Φ(Pl)=Φ(L)-Φ(Ll). Формирование увеличивающегося (уменьшающегося) корректирующего сигнала с блока 12, его суммирование с позиционным сигналом датчика 1 сумматором 4 отображается на фазовой плоскости движением линии P-P' вправо (влево) и сумматором 3 после изменения знака сигнала инвертором 13 движением линий L-L' влево (вправо) вдоль оси абсцисс Φ.
Пусть в начальный момент угол и угловая скорость объекта отображаются на фазовой плоскости точкой 1 (фиг.2,а). Так как сигнал угла U1 и скорректированные сигналы U3 и U4 больше порогового сигнала U2, то формируются U5 U6 1 и на выходах элементов И 9 и 10 U9 1, U10 0. Следовательно, формируется управляющий момент, вызывающий отрицательное угловое ускорение объекта, изображающая точка двигается по параболической траектории 1-2-3 (фиг.2,а,б, в). Одновременно на выходе сумматора 11 формируется U11 1 и на выходе корректирующего блока 12, например, в виде апериодического звена уменьшающийся (увеличивающийся по амплитуде с отрицательным знаком) корректирующий сигнал, что эквивалентно смещению линий P-P' вправо (сигнал на выходе сумматора 4 уменьшается) и линий L-L' влево (сигнал на выходе сумматора 3 увеличивается, так как сигнал U2 меняет знак в инверторе 13) относительно исходного положения (фиг.2,а). При этом происходит увеличение зоны нечувствительности релейной системы (расстояние между линиями P-P' и L-L') вдвое по сравнению с прототипом [3] что уменьшает возможность захвата регулятора упругими колебаниями. В точке 3 (фиг.2,в) скорректированный сигнал U4 становится меньше порогового, т.е. U6 0, но сигнал U3 по-прежнему больше порогового в нелинейном усилителе 5 (линия L-L' сместилась влево), поэтому на выходе элемента И 9 сигнал U9 0, на выходах элементов НЕ 7 и 8 U7 0 и U8 1, тогда на выходе элемента И 10 формируется U10 0 и управляющее воздействие изменяется на малое или нулевого уровня и изображающая точка движется по траектории 3-4 (фиг.2,г).
Одновременно на выходе сумматора 11 U11 0 и амплитуда корректирующего сигнала на выходе блока 12 начинает уменьшаться (подобно разряду конденсатора), что эквивалентно смещению линий P-P' и L-L' соответственно влево и вправо к исходному положению (фиг.2,в,г). В точке 4 (фиг.2,г) сигнал с сумматора 3 U3 становится меньше порогового и сигнал U5 0. Так как и U6 0, то элемент И 9 формируется U9 0, а схема И 10 сигнал U10 1 (поскольку на выходах схем НЕ 7 и 8 сигналы U7 U8 1). По сигналу с элемента И 10 U10 1 к объекту прикладывается управляющий момент, вызывающий его положительное ускорение, изображающая точка движется по траектории 4-5 (фиг.2,д). На выходе сумматора 11 при этом сигнал U11 1 и блоком 12 коррекции формируется увеличивающийся сигнал, т. е. линии P-P' перемещаются влево, а линии L-L' вправо относительно исходного положения на фиг.2,а. В точке 5 (фиг.2,д) скорректированный сигнал U4 с сумматора 4 вновь становится больше порогового в нелинейном усилителе 6 и формируется сигнал U6 1. Так как сигнал на выходе сумматора 3 по-прежнему меньше порогового в нелинейном усилителе 5, следовательно, U9 U10 0. Управляющий момент вновь изменяется на малый или нулевого уровня, изображающая точка перемещается по траектории 5-6 (фиг.2,е) сигнал U11 0, амплитуда корректирующего сигнала начинает уменьшаться (подобно разряду конденсатора), что эквивалентно движению линий P-P' вправо и L-L' влево к исходному положению.
В точке 6 сигнал с сумматора 3 становится больше порогового уровня в нелинейном усилителе 5 и формируется U5 1, а на выходе нелинейного усилителя 6 по-прежнему U6 1. Тогда на выходах элементов И 9 и 10 U9 1, U10 0. Формируется управляющий момент, вызывающий отрицательное угловое ускорение объекта, изображающая точка перемещается по траектории 6-1-2-3 (фиг.2,е,а,б,в), формируется уменьшающийся (увеличивающийся по амплитуде с отрицательным знаком) корректирующий сигнал и линии P-P' перемещаются вправо, а линии L-L' влево от исходного положения. Далее цикл управления повторяется в описанной последовательности.
Блок рассогласования 1 может быть выполнен в виде последовательно соединенных датчика угла и фильтра с передаточной функцией
WФ КФ[(T1p + 1)/(T2p + 1)]n, где T1>T2 постоянные времени интегро-дифференцирующего фильтра,
КФ коэффициент усиления,
p оператор Лапласа,
n 0,1,2, n степенной коэффициент.
Например, для КА датчиком угла может быть инфракрасный построитель местной вертикали.
В другом варианте реализации блок 1 может содержать датчик угла, датчик угловой скорости объекта, связанные каждый через свой усилитель со входами сумматора, выход которого подключен ко входу фильтра, описанного выше.
Блоки 15 и 16 могут формировать управляющие воздействия следующим образом:
Мупр М, если U9 1 и U10 0,
Мупр + М, если U9 0 и U10 1,
Мупр m или 0, если U9 0 и U10 0, где М величина управляющего момента большого уровня, формируемого исполнительными органами;
m величина управляющего момента малого уровня, формируемого исполнительными органами.
На фиг.3 приведены результаты моделирования работы предлагаемой системы управления при реализации блока рассогласования 1 в виде последовательно соединенных датчика угла и фильтра. Как показывают результаты моделирования, путем выбора параметров системы удается обеспечить активное демпфирование упругих колебаний объекта, что является дополнительным техническим результатом заявляемого технического решения. Как видно из фиг.3, начальная амплитуда упругих колебаний выносного элемента конструкции, имеющего момент инерции около 10% момента инерции объекта, собственную частоту колебаний около 1,5 радиан/с и нулевой логарифмический декремент затухания колебаний, уменьшилась с 0,1 рад. практически до нулевого значения за 6 мин.
Такое построение системы стабилизации позволяет сохранить преимущества прототипа в части исключения возможности формирования противоречащих друг другу управляющих сигналов на входах усилителя-преобразователя исполнительных органов, т.е. обеспечить помехозащищенность, повысить точность стабилизации объекта и повысить качество управления упругим объектом за счет уменьшения возможности захвата регулятора упругими колебаниями. Кроме того, как показывают результаты моделирования, предлагаемая релейная система управления обладает свойством активного демпфирования упругих колебаний объекта. (56) 1. Андронов И.М. и др. Система управления положением спутника "Метеор". Сб. "Управление в пространстве", т.1, М. Наука, 1975.
2. Хагес В. Проектирование прецизионной струйной системы управления положением космического аппарата. Сб. "Управление в пространстве", т.1, М. Наука, 1973.
3. Авторское свидетельство СССР N 962850, кл. G 05 B 13/02, 1982.
Изобретение относится к технике автоматического регулирования и может найти применение в системах управления стабилизацией углового движения инерционных объектов, например аппаратов с упругими выносными элементами конструкции, антеннами, штангами и т.д. Релейная система управления содержит блок рассогласования 1, блок 2 формирования порогового сигнала, третий 3 и первый 4 сумматоры, первый и второй нелинейные усилители 5, 6, первый и второй логические элементы НЕ 7, 8, первый и второй логические элементы И 9, 10, второй сумматор 11, корректирующий блок 12, второй 13 и третий 14 инверторы знака сигнала, исполнительный орган 16, второй инвертор 13 знака сигнала выходом подключен к первому входу третьего сумматора 3, а входом - к выходу корректирующего блока 12, выход третьего сумматора 3 подключен к первому входу первого нелинейного усилителя 5. 3 ил.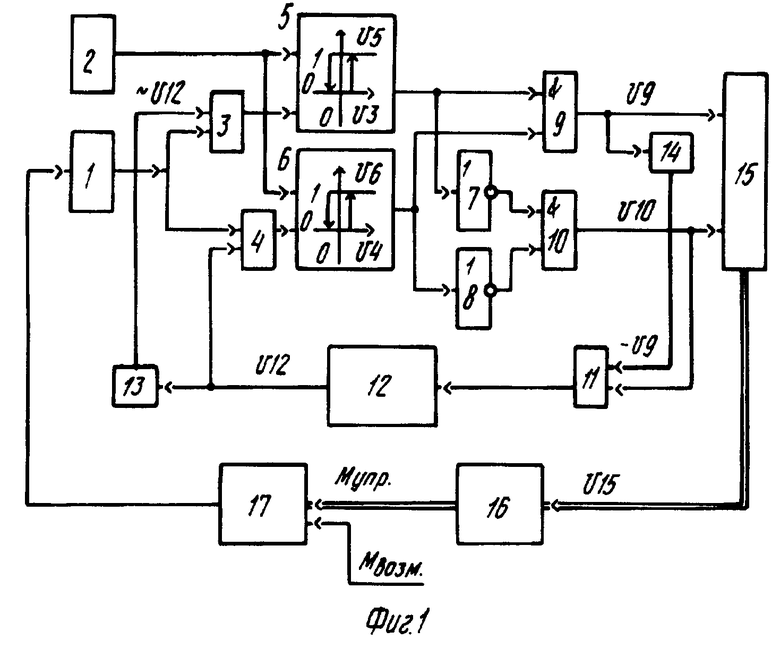
РЕЛЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая первый нелинейный усилитель, корректирующий блок, выход которого соединен с первым входом первого сумматора, второй вход которого соединен с выходом блока рассогласования, а выход с первым входом второго нелинейного усилителя, второй сумматор, первый вход которого соединен с выходом первого инвертора знака сигнала, а выход с входом корректирующего блока, блок формирования порогового сигнала, выход которого соединен с вторыми входами первого и второго нелинейных усилителей, последовательно соединенные усилитель-преобразователь, исполнительные органы, установленные с блоком рассогласования на инерционном объекте, два элемента И и два элемента НЕ, причем выход первого нелинейного усилителя соединен с входом первого элемента НЕ и первым входом первого элемента И, второй вход которого соединен с выходом второго нелинейного усилителя и входом второго элемента НЕ, выход которого соединен с первым входом второго элемента И, второй вход которого соединен с выходом первого элемента НЕ, а выход с вторым входом второго сумматора и первым входом усилителя-преобразователя, второй вход которого соединен с выходом первого элемента И и входом первого инвертора знака сигнала, отличающаяся тем, что в нее введены последовательно соединенные второй инвертор знака сигнала, вход которого соединен с выходом корректирующего блока, и третий сумматор, второй вход которого соединен с выходом блока рассогласования, а выход с первым входом первого нелинейного усилителя.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Релейная система управления | 1980 |
|
SU962850A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
