Изобретение относится к машиностроению, а именно к эксцентриковым преобразователям вращательного движения в возвратно-поступательное, может найти применение в частности в конструкциях объемных нагнетателей - поршневых, сильфонных или мембранных насосах, компрессорах и вакуумных насосах.
Известен эксцентриковый привод, содержащий корпус, установленный в нем с возможностью вращения приводной вал и ступень преобразования движения, состоящую из эксцентрично установленного на приводном валу подшипника и рамки, установленной в корпусе с возможностью перемещения в направлении, перпендикулярном оси приводного вала.
Недостатком известного привода заключается в повышенном шуме, обусловленном обкатыванием внешнего кольца эксцентричного подшипника по рамке и неустранимой неуравновешенностью возвратно-поступательно движущихся масс, а также ограниченностью функциональных возможностей механизма, определяемой наличием только двух выходных элементов для подсоединения исполнительных органов.
Цель изобретения - снижение шума путем устранения обкатывания подшипника по рамке и полного уравновешивания, а также расширение функциональных возможностей путем обеспечения большего числа подсоединяемых рабочих органов.
Для достижения цели предлагается ступень преобразования движения известного эксцентрикового механизма снабдить дополнительным подшипником, одно из колец которого закреплено на рамке, а другое жестко соединено с внешним кольцом эксцентричного подшипника.
Кроме того, механизм снабжен балансировочной массой и дополнительной ступенью преобразования движения, ориентированной таким образом, что направление движения ее рамки перпендикулярно направлению движения рамки основной ступени.
Кроме того, приведенные массы обеих ступеней выполнены одинаковыми, эксцентричные подшипники размещены на общей оси, а балансировочная масса закреплена на приводном валу со смещением в сторону, противоположную эксцентриситету.
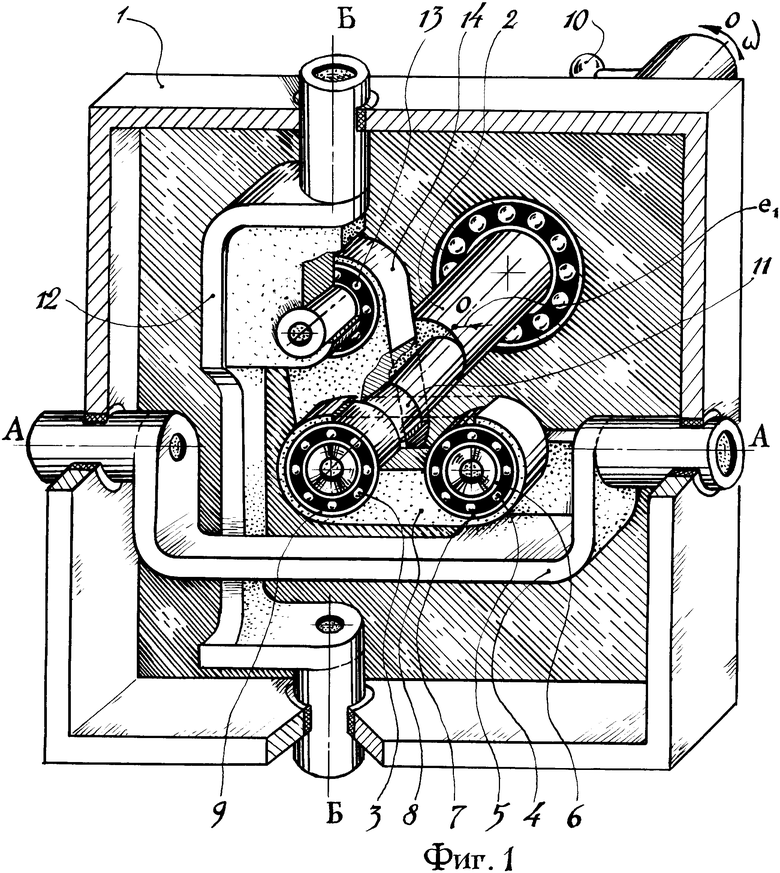
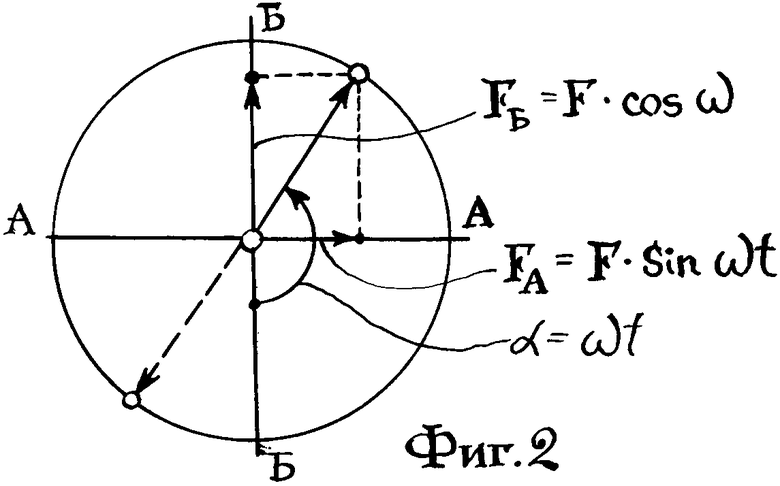
На фиг. 1 показан эксцентриковый механизм; на фиг. 2 - диаграмма сил инерции возвратно-поступательно движущихся масс.
Эксцентриковый механизм содержит корпус 1, установленный в нем с возможностью вращения (ось О-О) приводной вал 2 и ступень преобразования движения, состоящую из эксцентрично (эксцентриент е1) установленного на приводном валу 2 подшипника 3 и рамки 4, установленной в корпусе 1 с возможностью перемещения в направлении А-А, перпендикулярном оси О-О приводного вала 2. При этом ступень преобразования движения снабжена дополнительным подшипником 5, одно из колец 6 (внутреннее) которого закреплено на рамке 4, а другое кольцо 7 (наружное) жестко соединено хомутами 8 с внешним кольцом 9 подшипника 3.
Кроме того, механизм может быть снабжен балансировочной массой 10 и дополнительной ступенью преобразования движения с эксцентричным подшипником 11 и рамкой 12. При этом дополнительная ступень ориентирована таким образом, что направление Б-Б движения ее рамки 12 перпендикулярно направлению А-А движения рамки 4 основной ступени. На рамке 12 закреплен подшипник 13, наружное кольцо которого жестко соединено с подшипником 11 хомутом 14. Кроме того, приведенные массы подвижных деталей (подшипники, рамка с рабочими органами и частично - хомуты) обеих ступеней выполнены одинаковыми, эксцентричные подшипники 3 и 11 размещены на общей оси, а балансировочная масса 10 закреплена на приводному валу 2 со смещением в сторону, противоположную е1.
Механизм работает следующим образом.
При вращении приводного вала 2 эксцентричные подшипники 3 и 11 совершают вращательное движение по окружности радиусом е1. Через хомуты 8 и 14, надетые на их наружные кольца 9 и на наружные кольца 7 подшипников 5 и 13 вращательное движение вала 2 и колец 6 преобразуется в возвратно-поступательное движение рамок 4 и 12 в направляющих корпуса 1. Закрепленные на концах рамок 4 и 12 исполнительные органы (например поршни, диафрагмы, сильфоны) совершают полезную работу.
С достаточной степенью точности можно считать зависимость линейного перемещения рамок 4 и 12 от угла поворота приводного вала 2 синусоидальной.
XA= e1 sin αA= e1 sinω t;
XБ= e1 sin αБ.
Поскольку оси А-А и Б-Б взаимно перпендикулярны, то αБ= αA-90о,
ХБ= е1 sin( αA-90o)= e1 cos αA= e1 cos ω t.
Тогда выражения для сил инерции
FA= mA e1 ω2 sinω t;
FБ= mБ e1 ω2 cos ω t, при равенстве приведенных масс mA= mБ= m
FA= F sin ωt
FБ= F cos ωt.
Очевидно, что такие же проекции силы энерции имеет постоянная масса m, вращающаяся по радиусу е1 с угловой скоростью , т. о. наличие балансировочной массы 10 со стороны, противоположной эксцентритету е1, позволяет уравновесить суммирующую сил инерции, действующих по осям А и Б.
Таким образом, исключая обкатывание подшипников по рамке и уравновешивая механизм, можно добиться существенного снижения шума и вибрации.
Предложенная конструкция эксцентрикового механизма реализована в опытных образцах диафрагменных вакуумных насосов. Практически достигнутое улучшение шумовых и вибрационных характеристик позволило удовлетворить высокие требования, предъявляемые к насосам в медицинской технике.
(56) Авторское свидетельство СССР N 1397653, кл. F 16 H 21/18, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСЦЕНТРИКОВЫЙ ПРИВОД | 1992 |
|
RU2011073C1 |
| СПОСОБ СБОРКИ МНОГОСТУПЕНЧАТОЙ ВИХРЕВОЙ МАШИНЫ | 1991 |
|
RU2006683C1 |
| Эксцентриковый механизм | 1986 |
|
SU1397653A1 |
| Осциллятор для генерирования продольных механических колебаний | 2021 |
|
RU2751497C1 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ СМЕСИ СЫПУЧИХ МАТЕРИАЛОВ | 2010 |
|
RU2436622C1 |
| СМЕСИТЕЛЬ БУХАНЬКО | 1992 |
|
RU2082489C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2013 |
|
RU2539438C1 |
| Бесшатунный механизм поршневой машины | 2021 |
|
RU2781324C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ТОРМОЗА | 2004 |
|
RU2261813C1 |
| УСТРОЙСТВО ПЕРЕСТРОЙКИ ЧАСТОТЫ | 1986 |
|
SU1840544A1 |
Использование: в эксцентриковых преобразователях вращательного движения в возвратно-поступательное. Сущность: на приводном валу эксцентрично установлены подшипники. В корпусе установлены взаимно перпендикулярно с возможностью вращения и возвратно-поступательного перемещения рамки. На рамках закреплены подшипники, которые связаны хомутами с подшипниками. Для уравновешивания суммарной составляющей сил инерции движущихся частей на приводной валу установлена балансировочная масса. 2 з. п. ф-лы, 2 ил.
