Изобретение относится к транспортному машиностроению и может быть использовано в тормозных системах электрических транспортных средств (трамваев, метро).
Известен электромеханический привод GBM III немецкой фирмы РАКО, включающий электродвигатель, через планетарный редуктор связанный с эксцентриковым валом, силовую пружину, размещенную перпендикулярно оси эксцентрикового вала, шатун, проходящий внутри пружины и связывающий эксцентриковый вал посредством пальца с втулкой.
Недостатком устройства является то, что тормозное усилие при минимальном зазоре между тормозным диском и колодками, т.е. при максимально сжатой пружине, будет отлично от усилия при максимальном зазоре между тормозным диском и колодками, т. е. при максимально распущенной пружине, и разница в усилиях будет тем больше, чем больше ход штока, т.е. чем больше эксцентриситет.
Известен электромеханический привод тормоза (№2221717, В 60 Т 1/00), принятый за прототип, включающий корпус, расположенный в нем эксцентриковый вал, связанный через редуктор с электродвигателем. Расположенная в стакане пружина размещена перпендикулярно оси эксцентрикового вала. Шатун, проходящий внутри пружины, связывает посредством пальца эксцентриковый вал с втулкой, в которую упирается торец пружины. Причем пружина упирается одним торцом во фланец резьбовой втулки, а другим - в стакан, который установлен в корпусе с возможностью вращения, кроме того, внутри резьбовой втулки размещен коаксиально ей шток с резьбовым окончанием. При торможении на двигатель подается сигнал. Эксцентриковый вал поворачивается, при этом пружина разжимается, и шток выдвигается. Тормозные колодки прижимаются к тормозному диску. При растормаживании на двигатель подается сигнал, он включается и поворачивает эксцентриковый вал, который через шатун и палец перемещает втулку, сжимая пружину, и тем самым передвигает шток. При втягивании штока колодки разжимаются.
Недостатком привода является то, что при любом ходе штока усилие на колодках при минимальном и максимальном зазоре между колодками и тормозным диском не могут быть отличны от рабочих усилий пружины.
Технической задачей изобретения является расширение эксплуатационных возможностей привода посредством получения различных усилий на колодках, в том числе и одинаковых, при максимальном и минимальном зазоре между колодками и тормозным диском, а также посредством достижения аналогичных выходных усилий при одних и тех же перемещениях штока с использованием пружин с различными силовыми характеристиками.
Поставленная техническая задача достигается тем, что в электромеханическом приводе тормоза, включающим корпус, расположенный в нем эксцентриковый вал, сообщенный через редуктор с электродвигателем, пружину, размещенную перпендикулярно оси эксцентрикового вала, шатун, связывающий эксцентриковый вал с втулкой, во фланец которой упирается торец пружины, а также шток, согласно изобретению на эксцентриковом валу выполнены две эксцентриковые поверхности, расположенные относительно друг друга под углом, причем с одной эксцентриковой поверхностью связана втулка, а с другой - шток.
Поставленная техническая задача достигается также тем, что в предложенном электромеханическом приводе тормоза согласно изобретению эксцентриковые поверхности выполнены с различными эксцентриситетами.
Указанная задача может быть решена также тем, что угол разворота осей штока и втулки равен углу разворота эксцентриковых поверхностей.
Сравнение заявленного электромеханического привода тормоза с известными позволяет сделать вывод о достижении нового эффекта, выразившегося в том, что при выполнении на одном эксцентриковом валу двух эксцентриковых поверхностей, расположенных под углом, при связи одной поверхности со штоком, а другой с втулкой, появляется возможность выравнивания усилий на колодках. За счет определенного угла расположения эксцентриковых поверхностей создается такое отношение плеч входной силы от действия пружины и выходной силы на колодках, за счет которого на колодках во всем диапазоне их работы создаются усилия, близкие либо превосходящие усилия торможения при неизношенных колодках. При величине эксцентриситета поверхности, связанной с втулкой, больше величины эксцентриситета поверхности, связанной со штоком (плечо силы, создаваемой пружиной, больше плеча выходной силы), аналогичные усилия на колодках могут быть получены при использовании пружины с меньшими силовыми характеристиками, чем у пружины, используемой в приводах с одним эксцентриком.
Сущность изобретения поясняется чертежами, где:
- на фиг.1 изображена аксонометрическая проекция электромеханического привода с вырезом одной четверти;
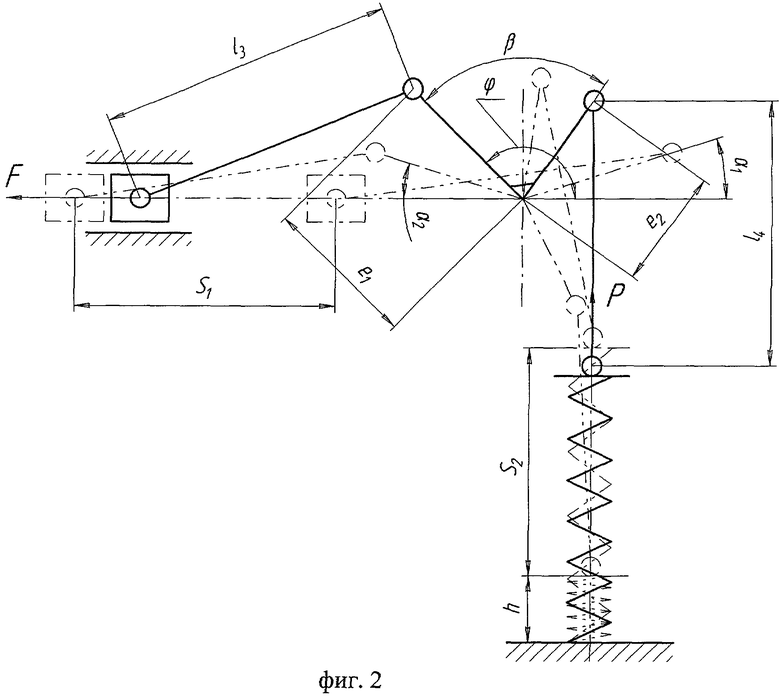
- на фиг.2 изображена схема расчета выходного усилия;
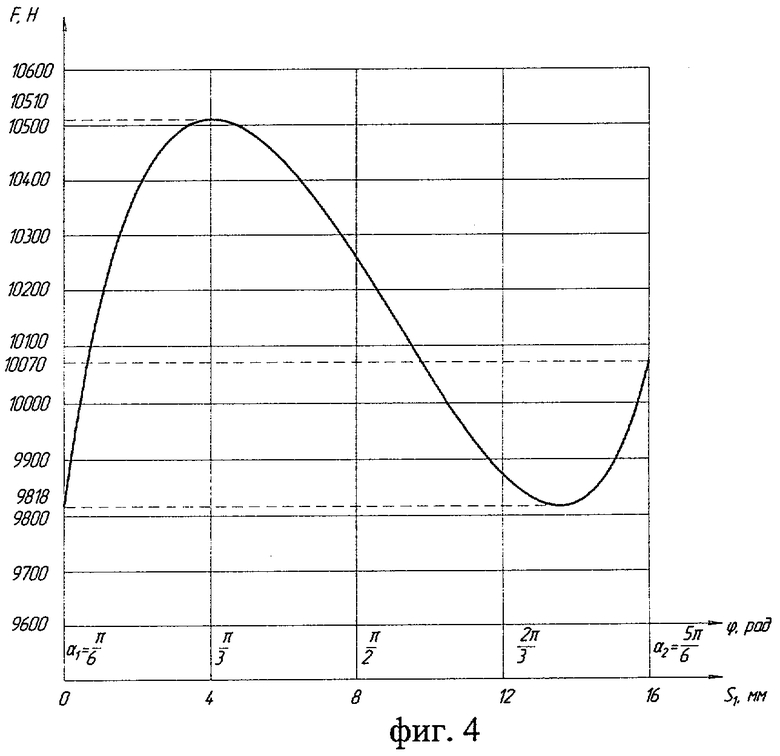
- на фиг.3, фиг.4 изображены графики зависимости выходной силы на штоке от угла поворота эксцентрикового вала.
Электромеханический привод тормоза (фиг.1) содержит корпус 1, в котором размещен двигатель 2, связанный через редуктор 3 с эксцентриковым валом 4, установленным в корпус 1 с возможностью поворота на подшипниках 5. На эксцентриковом валу 4 выполнены две эксцентриковые поверхности А и В, расположенные друг относительно друга под определенным углом, при этом на одной из них А перпендикулярно оси эксцентрикового вала с возможностью поворота установлен шатун 6, связанный через палец 7 со штоком 8, который сбазирован в расточке С корпуса 1 с возможностью возвратно-поступательного движения. На другой эксцентриковой поверхности В перпендикулярно оси эксцентрикового вала установлен с возможностью поворота шатун 9, связанный через палец 10 с втулкой 11, которая с возможностью возвратно-поступательного движения установлена в расточке D корпуса 1. Оси расточек С и D, в которых установлены шток 8 и втулка 11, расположены под углом, равным углу разворота эксцентриковых поверхностей А и В. Во фланец втулки 11 упирается торец пружины 12. Другой торец пружины 12 упирается в корпус 1.
Электромеханический привод работает следующим образом. Сигнал торможения подается на двигатель 2, который через редуктор 3 позволяет повернуться эксцентриковому валу 4 на определенный угол ϕ, который изменяется в пределах α1≤ϕ≤π-α2 (фиг.2). Если угол ϕ принять за угол поворота эксцентриковой поверхности А, на которую установлен шатун 6, связанный через палец 7 с штоком 8, то плечо выходной силы F будет равно:
l1=e1·sin(ϕ),
где е1 - эксцентриситет эксцентриковой поверхности А.
Эксцентриковый вал 4 поворачивается благодаря моменту, создаваемому пружиной 12, которая, упираясь во фланец втулки 11, воздействует на шатун 9, установленный на эксцентриковой поверхности В, так как втулка 11 связана с шатуном 9 через палец 10. Таким образом, плечо силы Р пружины 12 равно:
l2=e2·cos(β-ϕ),
где е2 - эксцентриситет эксцентриковой поверхности В,
β - угол разворота эксцентриковых поверхностей.
При расчетах плеч l1 и l2 были приняты допущения, что шатуны 6 и 9 располагаются параллельно осям штока 8 и втулки 11 соответственно, а значит, и осям расточек С и D. Эти допущения справедливы, так как максимальные углы отклонения шатунов 6 и 9 от параллельности осям расточек С и D, соответственно равные  и
и  , где l3 - длина шатуна 6, l4 - длина шатуна 9, будут весьма незначительны при величинах l3 и l4, много больших соответствующих величин эксцентриситетов е1 и е2. Перемещение штока 8 вычисляется как
, где l3 - длина шатуна 6, l4 - длина шатуна 9, будут весьма незначительны при величинах l3 и l4, много больших соответствующих величин эксцентриситетов е1 и е2. Перемещение штока 8 вычисляется как
S1=е1·(cos(α1)-cos(ϕ))
При этом ход пружины 12 будет равен
S2=e2·(sin(β-α1)-sin(β-ϕ)).
Так как моменты от сил пружины и торможения равны, то
F·l1=P·l2
F·е1·sin(ϕ)=Р·е2·cos(β-ϕ)
Само усилие, создаваемое пружиной, зависит от поворота эксцентрикового вала, поэтому
P=z1·(H0-(h+S2)),
где z1 - жесткость пружины,
Н0 - высота пружины в ненагруженном состоянии,
h - высота пружины при рабочей деформации.
Таким образом, выходное усилие равно

или при подстановке величины S2

При растормаживании подается сигнал на двигатель 2, который через редуктор 3, поворачивает эксцентриковый вал 4, при этом пружина 12 сжимается, а шток 8 движется в обратную сторону.
При расположении осей расточек С и D (т.е. осей штока и втулки) под углом, отличным от угла разворота эксцентриковых поверхностей А и В, возможно уменьшение углов отклонения шатунов от осей расточек, т.е. уменьшение погрешности расчетов. Так при угле разворота расточек С и D, равным  можно снизить погрешность расчетов примерно в два раза.
можно снизить погрешность расчетов примерно в два раза.
Пусть задан ход штока привода S1=16 мм, среднее усилие на колодках F=10000 Н. Используем пружину с жесткостью z1=187.5 Н/мм с предварительным усилием P1=9000 Н, рабочим усилием Р2=12000 Н. Высота пружины в ненагруженном состоянии Н0=189.5 мм, высота пружины при рабочей деформации h=127 мм. Эксцентриситет поверхности, связанной со штоком, е1=9.24 мм, эксцентриситет поверхности, связанной с втулкой, е2=9.24 мм. Предельные значения угла ϕ поворота эксцентрикового вала  ,
,  . Подбирая различные значения угла β разворота эксцентриковых поверхностей, строим график зависимости выходной силы F от угла поворота эксцентрикового вала ϕ. При угле разворота эксцентриковых поверхностей β=94.826° (фиг.3) усилия вначале и конце хода штока одинаковы и равны F=9970 Н. Максимальные и минимальные усилия на протяжении всего хода соответственно равны Fmax=10560 Н и Fmin=9760 Н. Разность между максимальным и минимальным усилием ΔF=Fmax-Fmin=10560-9760=800 Н. При угле разворота эксцентриковых поверхностей β=95.23° (фиг.4) разность между максимальным и минимальным усилием ΔF=Fmax-Fmin=10510-9818=692 Н, при этом усилие в начале хода меньше усилия в конце хода.
. Подбирая различные значения угла β разворота эксцентриковых поверхностей, строим график зависимости выходной силы F от угла поворота эксцентрикового вала ϕ. При угле разворота эксцентриковых поверхностей β=94.826° (фиг.3) усилия вначале и конце хода штока одинаковы и равны F=9970 Н. Максимальные и минимальные усилия на протяжении всего хода соответственно равны Fmax=10560 Н и Fmin=9760 Н. Разность между максимальным и минимальным усилием ΔF=Fmax-Fmin=10560-9760=800 Н. При угле разворота эксцентриковых поверхностей β=95.23° (фиг.4) разность между максимальным и минимальным усилием ΔF=Fmax-Fmin=10510-9818=692 Н, при этом усилие в начале хода меньше усилия в конце хода.
Использование предлагаемого устройства позволит на протяжении всего хода штока привода иметь приблизительно равные усилия торможения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221717C1 |
| Карусельная установка для изготовления строительных изделий | 1990 |
|
SU1763193A1 |
| СПОСОБ СОЗДАНИЯ АДАПТИРОВАННОГО УДАРА ПРИ ЗАГЛУБЛЕНИИ ИНСТРУМЕНТА В ПОРОДУ И УДАРНЫЙ МЕХАНИЗМ ДВС С ФОРСИРУЕМОЙ ЭНЕРГИЕЙ И МОЩНОСТЬЮ | 2008 |
|
RU2411359C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТОРМОЗ | 2010 |
|
RU2424136C1 |
| Устройство для выравнивания скорости ножей летучих ножниц | 1980 |
|
SU975256A1 |
| САМОКАТ ГОРЛОВА | 1997 |
|
RU2131821C1 |
| Привод струговой установки | 1982 |
|
SU1564336A1 |
| Комбинированное устройство для подвески и улавливания клети шахматного подъема | 1951 |
|
SU112825A1 |
| СТОЯНОЧНЫЙ ТОРМОЗ СНЕГОБОЛОТОХОДА | 2024 |
|
RU2828926C1 |
| ТОРМОЗНОЙ ПРИВОД | 2014 |
|
RU2550786C1 |

Изобретение относится к транспортному машиностроению и может быть использовано в тормозных системах электрических транспортных средств. Электромеханический привод тормоза включает корпус, расположенный в нем эксцентриковый вал, сообщенный через редуктор с электродвигателем, пружину. Пружина размещена перпендикулярно оси эксцентрикового вала, а шатун связывает посредством пальца эксцентриковый вал с втулкой, во фланец которой упирается торец пружины. На эксцентриковом валу выполнены две эксцентриковые поверхности, расположенные относительно друг друга под определенным углом, причем с одной эксцентриковой поверхностью связана пружина, а с другой - шток. Эксцентриковые поверхности могут быть выполнены с различными эксцентриситетами, а угол разворота осей штока и втулки равен углу разворота эксцентриковых поверхностей. Техническим результатом является расширение эксплуатационных возможностей привода. 2 з.п. ф-лы, 4 ил.
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221717C1 |
| US 4175645 A1, 27.11.1979 | |||
| US 4805740 A1, 21.02.1989 | |||
| DE 10106373 C1, 12.02.2001. | |||

