Изобретение относится к машиностроению и может быть использовано для преобразования вращательного движения в возвратно-поступательное рабочих органов мембранных или поршневых насосов (компрессоров, вакуум-насосов) или наоборот (пневмо- или гидродвигатели, ДВС).
Известен эксцентриковый привод, содержащий установленный в корпусе с возможностью вращения вокруг оси А-А вал и закрепленный на нем своим ведущим кольцом с эксцентриситетом относительно оси А-А приводной подшипник, две рамки с штоками, установленные в корпусе с возможностью возвратно-поступательного движения во взаимно перпендикулярных направлениях Х-Х и Y-Y, перпендикулярных оси А-А, два дополнительных подшипника, ведомые кольца каждого из которых соединены с соответствующими рамками, а ведущие - с ведомым кольцом приводного подшипника.
Недостатки известного привода заключаются в том, что его технические характеристики, например скорость вращения, ограничены тем, что кольца вспомогательных подшипников в относительном движении совершают колебательное движение, изменяя направление вращения два раза за каждый цикл работы (это приводит к проскальзыванию и повышенному износу опор). Сложность конструкции известного привода определяется большим (минимум пять) количеством дополнительных подшипников. В реальных размерах они должны быть существенно меньше приводного подшипника, что снижает допустимые усилия на штоках привода. Определенное усложнение конструкции обуславливается также и необходимостью точной сборки при получении гарантированного натяга пары "дополнительные подшипники - опоры рамки".
Цель изобретения - расширение технических характеристик привода путем обеспечения равномерного относительного вращения колец дополнительных подшипников, а также упрощение конструкции и снижение габаритов привода и повышение допустимых усилий на штоки.
Для достижения поставленной цели предлагается эксцентриковый привод, содержащий установленный в корпусе с возможностью вращения вокруг оси А-А вал и закрепленный на нем своим ведущим кольцом с эксцентриситетом е относительно оси А-А приводной подшипник, две рамки с штоками, установленные в корпусе с возможностью возвратно-поступательного движения во взаимно перпендикулярных направлениях Х-Х и Y-Y, перпендикулярных оси А-А, два дополнительных подшипника, ведомые кольца каждого из которых соединены с соответствующими рамками, а ведущие - с ведомым кольцом приводного подшипника, согласно предлагаемому техническому решению снабдить вспомогательным валом, жестко соединенным с ведомым кольцом приводного подшипника, а ведущие кольца дополнительных подшипников установлены на вспомогательном валу с одинаковым по величине и противоположным по направлению эксцентриситетом е.
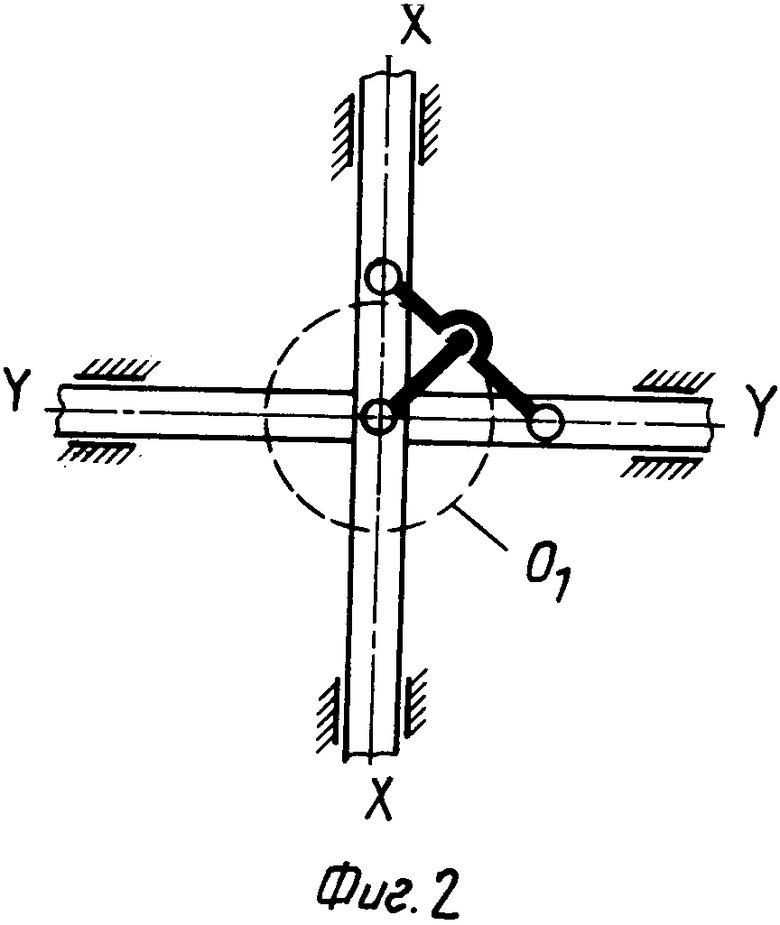
На фиг. 1 показан предлагаемый привод, продольный разрез; на фиг. 2 - кинематическая схема привода.
Эксцентриковый привод содержит установленный в корпусе 1 с возможностью вращения вокруг оси А-А вал 2 и закрепленный на нем своим ведущим кольцом 3 с эксцентриситетом е относительно оси А-А приводной подшипник 4 (на фиг. 1 - сдвоенный), две рамки 5 и 6 штоками 7, установленные в корпусе 1 с возможностью возвратно-поступательного движения во взаимно перпендикулярных направлениях Х-Х и Y-Y, перпендикулярных оси А-А. Два дополнительных подшипника 8 и 9, ведомые кольца 10 и 11 каждого из которых соединены соответственно с рамками 5 и 6, а ведущие кольца 12 и 13 - с ведомым кольцом 14. При этом привод снабжен вспомогательным валом 15 с осью вращения Б-Б, жестко соединенным с ведомым кольцом 14 приводного подшипника 4, а ведущие кольца 12 и 13 дополнительных подшипников 8 и 9 установлены на вспомогательном валу 15 с одинаковым по величине и противоположным по направлению эксцентриситетом е.
Эксцентриситеты е приводного подшипника 4 относительно вала 2 и дополнительных подшипников 8 и 9 относительно вспомогательного вала 15 в конструкции, показанной на фиг. 1, достигается установкой подшипников 4 и 8, 9 на валы 2 и 15 с помощью эксцентриков 16, 17 и 18 соответственно. При этом эксцентрики 17 и 18 развернуты на валу 15 друг относительно друга на 180о.
При преобразовании вращательного движения в возвратно-поступательное работа привода осуществляется следующим образом.
От внешнего двигателя приводится во вращение относительно корпуса 1 вокруг оси А-А вал 2. Через эксцентрик 16 с закрепленным на нем ведущим кольцом 3 подшипника 4 движение передается на ведомое кольцо 14 и закрепленный на нем вспомогательный вал 15. Ось Б-Б последнего совершает вращательное движение по окружности радиусом R= e1= e (окружность О1 - см. фиг. 2). Вместе с валом 15 в этом же движении по окружности радиусом R= e участвуют закрепленные на нем эксцентрики 17 и 18, от которых через дополнительные подшипники 8 и 9 движение преобразуется в возвратно-поступательное перемещение рамок 5 и 6 с штоками 7 в опорах корпуса 1 с амплитудой ± 2е. Последнее преобразование аналогично имеющему место в кривошипно-шатунном механизме в случае, когда эксцентриситет равен длине шатуна.
Как видно из фиг. 2 для прохождения мертвых точек без заклиниваний необходимо, чтобы погрешность выполнения эксцентриситетов Ie1-e2 I и I e1-e3 I не превышала допускаемых радиальных биений штоков 7. Естественное стремление в общем случае к минимизации этих биений (например, при использовании данного механизма для привода поршней компрессора с лабиринтными уплотнениями) накладывает жесткие требования на допуски эксцентриситетов e1, e2 и е3. В конструкции на фиг. 1 эта задача решена использованием одинаковых эксцентриков 16, 17 и 18, которые могут быть обработаны совместно.
В отличие от известных эксцентриковых приводов, равно как и шатунных, ведомые кольца 12 и 13 подшипников 8 и 9 совершают относительно ведущих колец 10 и 11 соответственно не качательное, а равномерное вращательное движение.
Полное отсутствие опор скольжения существенно упрощает изготовление, отпадает необходимость в сложной системе смазки.
(56) Авторское свидетельство СССР N 1629651, кл. F 16 H 21/18, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСЦЕНТРИКОВЫЙ МЕХАНИЗМ | 1992 |
|
RU2011072C1 |
| Эксцентриковый механизм | 1986 |
|
SU1397653A1 |
| ЭКСЦЕНТРИКОВАЯ ШАРИКОВАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2007 |
|
RU2341710C1 |
| Бесшатунный механизм поршневой машины | 2021 |
|
RU2781324C1 |
| Эксцентриковый механизм | 1983 |
|
SU1100450A1 |
| ЭКСЦЕНТРИКОВЫЙ ШАТУН | 1999 |
|
RU2178106C2 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2013 |
|
RU2539438C1 |
| БЕСШАТУННЫЙ МОДУЛЬНЫЙ ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С СИЛОВЫМ МЕХАНИЗМОМ ЭКСЦЕНТРИКОВОГО ТИПА | 2002 |
|
RU2212552C1 |
| ЭЛЕКТРОНАСОСНЫЙ ДОЗИРОВОЧНЫЙ АГРЕГАТ | 2003 |
|
RU2227846C1 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ КРИВОШИПА ПЕРЕМЕННОЙ ДЛИНЫ | 1998 |
|
RU2139459C1 |
Изобретение относится к машиностроению и позволяет расширить технические характеристики привода путем обеспечения равномерного относительного вращения колец подшипников, а также упростить конструкцию и снизить габариты привода и повысить допустимые усилия на штоках. Привод содержит установленный в корпусе 1 с возможностью вращения вокруг оси А - А вал 2 и закрепленный на нем с эксцентриситетом e приводной подшипник (П) 4, две рамки (Р) 5 и 6 с штоками 7, установленные с возможностью возвратно-поступательного движения во взаимно перпендикулярных направлениях X - X и Y - Y, перпендикулярных оси А - А, два дополнительных П 8 и 9, ведомые кольца (К) 10 и 11 которых закреплены на Р 5 и 6 соответственно, вспомогательный вал 15. Последний жестко соединен с ведущими К 12 и 13 П 8 и 9 и ведомыми К 14 П 4. При этом П 8 и 9 установлены на валу 15 с эксцентриситетами e, противоположными по направлению. При вращении вала 2 внешним двигателем вокруг оси А - А ось Б - Б вала 15 движется по окружности радиусом e. Через П 8 и 9 это вращение преобразуется в возвратно-поступательное движение Р 5 и 6 вдоль оси X - X и Y - Y. Полное исключение нагруженных опор скольжения существенно упрощает изготовление, отпадает необходимость в сложной системе смазки. 2 ил.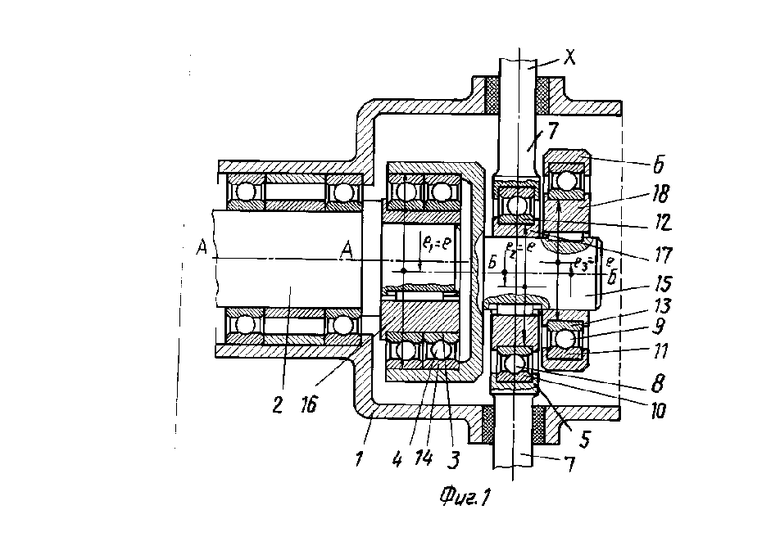
ЭКСЦЕНТРИКОВЫЙ ПРИВОД, содержащий вал, установленный в корпусе с возможностью вращения вокруг своей оси, закрепленный на нем своим ведущим кольцом с эксцентриситетом относительно оси вала приводной подшипник, две рамки со штоками, установленные в корпусе с возможностью возвратно-поступательного движения во взаимно перпендикулярных направлениях, перпендикулярных к оси вала, два дополнительных подшипника, ведомые кольца каждого из которых соединены с соответствующими рамками, а ведущие - с ведомым кольцом приводного подшипника, отличающийся тем, что он снабжен вспомогательным валом, жестко соединенным с ведомым кольцом приводного подшипника, а ведущие кольца дополнительных подшипников установлены на вспомогательном валу с одинаковым по величине и противоположным по направлению эксцентриситетом.
