Изобретение относится к технике автоматического управления колебательными объектами и может найти применение в пищевой, машиностроительной, химической и других отраслях промышленности.
Известен способ управления возбуждением вибропитателя, который включает формирование сигнала управления регулирующим тиристором, через который от электрической сети переменного тока питается электромагнитный привод вибропитателя.
При изменении сигнала управления регулирующим тиристором изменяется угол его открытия. Соответственно изменяется амплитуда тягового усилия электромагнитного привода, а, следовательно, и амплитуда колебаний вибропитателя.
Недостатком известного способа является низкая точность управления возбуждением вибропитателя. Недостаток обусловлен тем, что при отклонениях напряжения электрической сети переменного тока от номинального значения изменяется амплитуда тягового усилия электромагнитного привода, т. е. амплитуда колебаний вибропитателя. Это связано с тем, что в известном способе не предусмотрена коррекция сигнала управления регулирующим тиристором при отклонениях напряжения электрической сети переменного тока номинального значения.
Более близким по технической сущности является способ управления возбуждением вибропитателя, реализованный в известном устройстве.
Известный способ включает формирование сигнала, характеризующего напряжение электрической сети переменного тока, питающей через регулирующий тиристор электромагнитный привод вибропитателя, и формирование сигнала управления регулирующим тиристором.
Известный способ предусматривает корректирование сигнала управления регулирующим тиристором при наличии основного возмущающего воздействия - отклонениях напряжения электрической сети переменного тока от номинального значения.
При отклонениях напряжения электрической сети переменного тока от номинального значения, приводящих к отклонению амплитуды тягового усилия электромагнитного привода от заданного значения, а следовательно, к отклонению амплитуды колебаний от заданного значения, происходит изменение сигнала управления регулирующим тиристором в сторону компенсации возникшего отклонения.
Недостатком известного способа является относительно низкая точность управления возбуждением вибропитателя при отклонениях напряжения электрической сети переменного тока от номинального значения. Недостаток обусловлен тем, что известный способ не учитывает специфическую особенность электромагнитного привода - квадратическую зависимость амплитуды тягового усилия электромагнитного привода и амплитуды колебаний вибропитателя от подводимого к электромагнитному приводу напряжения.
Целью изобретения является повышение точности управления возбуждением вибропитателя при отклонениях напряжения электрической сети переменного тока от номинального значения.
Поставленная цель достигается тем, что в способе управления возбуждением вибропитателя, включающем формирование сигнала, характеризующего напряжение электрической сети переменного тока, питающей через регулирующий тиристор электромагнитный привод вибропитателя, и формирование сигнала управления регулирующим тиристором, сигнал, характеризующий напряжение электрической сети переменного тока, формируют путем измерения амплитудных значений указанного напряжения, а сигнал управления регулирующим тиристором формируют путем вычисления сигнала, характеризующего амплитудное значение тягового усилия электромагнитного привода вибропитателя, выявления отклонения вычисленного сигнала от сигнала характеризующего заданное значение амплитуды тягового усилия, и изменения сигнала управления регулирующим тиристором в сторону компенсации выявленного отклонения, причем вычисление сигнала fА, характеризующего амплитудное значение тягового усилия, осуществляют в соответствии с соотношением:
fA= K2V
Uу - сигнал управления регулирующим тиристором;
K1, K2 - коэффициенты пропорциональности.
Сопоставительный анализ предлагаемого технического решения с прототипом показывает, что предлагаемый способ отличается от известного последовательностью выполнения действий, образующих способ, во времени, а также наличием новых действий. Таким образом, предлагаемый способ соответствует критерию изобретения "новизна".
Анализ предлагаемого технического решения показывает, что его отличительные признаки придают объекту изобретения свойство, не совпадающее со свойствами известных решений, а именно, обеспечивается возможность нелинейной коррекции сигнала управления регулирующим тиристором при отклонениях напряжения электрической сети переменного тока от номинального значения. Это свойство обеспечивает достижение положительного эффекта. Таким образом, предлагаемое техническое решение соответствует критерию изобретения "существенные отличия".
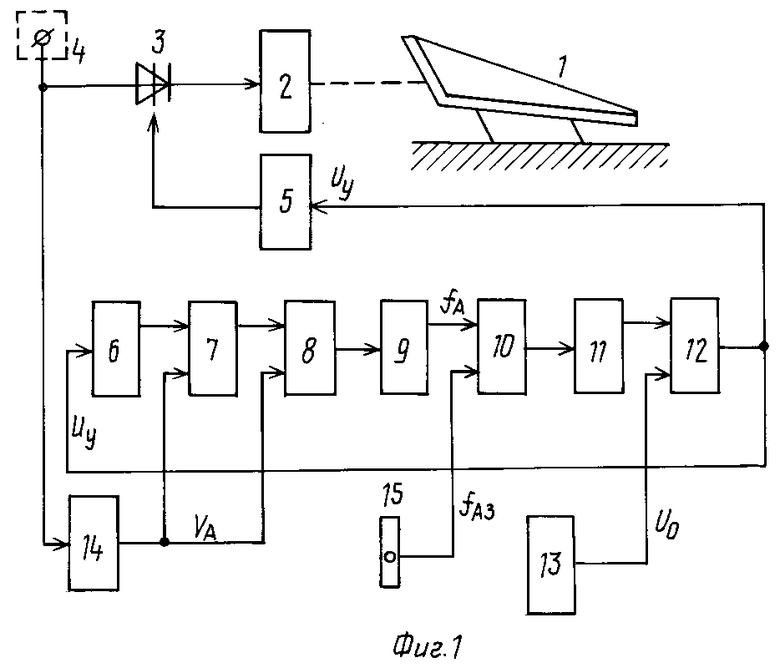
На фиг. 1 изображено устройство для осуществления способа; на фиг. 2 - диаграммы сигналов на выходах элементов устройства.
Устройство для осуществления способа (см. фиг. 1) содержит вибропитатель 1 с электромагнитным приводом 2, питающимся через регулирующий тиристор 3 от электрической сети 4 переменного тока. Устройство содержит также фазосмещающее устройство 5, первый функциональный преобразователь 6, блок 7 умножения, сумматор 8, второй функциональный преобразователь 9, элемент 10 сравнения, регулятор 11, вычитатель 12, источник 13 опорного сигнала, амплитудный детектор 14 и шину 15 управления.
На фиг. 1 обозначено:
fАЗ - сигнал, характеризующий заданное значение амплитуды тягового усилия;
fА - сигнал, характеризующий амплитудное значение тягового усилия;
Uу - сигнал управления регулирующим тиристором 3;
Uо - опорный сигнал;
VА - сигнал характеризующий измеренное амплитудное значение напряжения электрической сети переменного тока.
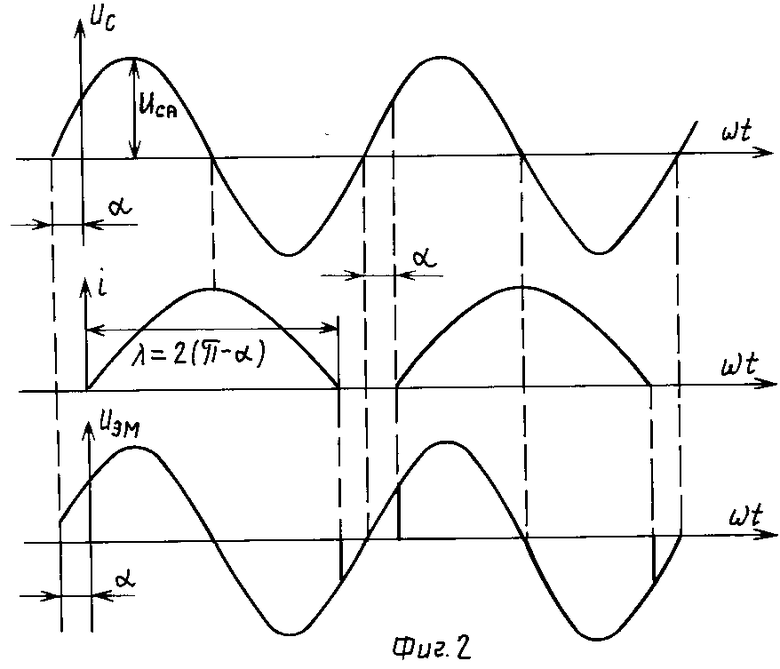
На фиг. 2 обозначено:
Uс - напряжение электрической сети переменного тока;
UСА - амплитудное значение этого напряжения;
i - ток в электромагнитном приводе;
UЭМ - напряжение на электромагнитном приводе.
Способ осуществляют следующим образом.
Вибропитателю 1 (например, вибролотку, как показано на фиг. 1 вибробункеру и т. п. ) сообщают колебания при помощи электромагнитного привода 2, который питают от электрической сети 4 переменного тока через регулирующий тиристор 3. Частота колебаний вибропитателя определяется частотой электрической сети 4 переменного тока, а амплитуда колебаний зависит от угла открытия α регулирующего тиристора 3. Угол открытия α определяется величиной сигнала Uу управления регулирующим тиристором 3, поступающим на вход фазосмещающего устройства 5 в соответствии с соотношением
α= K1Uу . (1) где K1 - коэффициент пропорциональности.
На каждом периоде напряжения Uс электрической сети переменного тока (см. фиг. 2) через электромагнитный привод 2 протекают импульсы тока i, приводящие, благодаря наличию в электромагнитном приводе 2 упругих элементов, к возникновению механических колебаний вибропитателя 1.
Уравнение, описывающее закон изменения импульса тока i на каждом периоде напряжения Uс сети переменного тока имеет вид
L  + Ri= UСАsin(ωt+α), t= 0 ÷
+ Ri= UСАsin(ωt+α), t= 0 ÷  (2) где UСА - амплитудное значение напряжения Uс электрической сети переменного тока;
(2) где UСА - амплитудное значение напряжения Uс электрической сети переменного тока;
t - текущее время;
ω - круговая частота напряжения Uс;
α - угол открытия регулирующего тиристора 3;
R - активное сопротивление электромагнитного привода;
L - индуктивность электромагнитного привода.
Индуктивность L принята в (2) постоянной величиной, поскольку в промышленных электромагнитных приводах амплитуду колебаний устанавливают существенно меньшей величины зазора в электромагнитном приводе во избежание соударений при колебаниях нагрузки на вибропитателе.
Текущее время t отсчитывается на каждом периоде напряжения Uсэлектрической сети переменного тока от момента открытия регулирующего тиристора 3 до момента t = λ / 2 π. где λ - длительность импульса тока (открытого состояния тиристора 3), поскольку уравнение (2) действительно только для открытого состояния тиристора 3. На интервале t = 0Nλ / 2 π напряжение UЭМ на электромагнитном приводе повторяет напряжение Uс, а на остальных промежутках равно нулю (см. фиг. 2).
Закон изменения импульсов тока i на каждом периоде напряжения Uсопределяется решением уравнения (2)
i=  [sin(ϕ-α)exp(-ωtctgϕ)+sin(ωt+α-ϕ)] (3) где ϕ = arctg
[sin(ϕ-α)exp(-ωtctgϕ)+sin(ωt+α-ϕ)] (3) где ϕ = arctg
Характерной особенностью электромагнитного привода является то, что ωL >> R. Тогда ϕ ≈ π /2, и соответственно
i =  [cosα-cos(ωt+α)] (4)
[cosα-cos(ωt+α)] (4)
Длительность λ импульса тока i на каждом периоде напряжения Uснаходится из (4) при условии i = 0:
λ= 2 (π - α), (5) т. е. импульс тока i заканчивается в момент времени
tк=  =
=  (6)
(6)
Тяговое усилие F электромагнитного привода (см. например, книгу Аранович Б. И. , Шамрай Б. В. Электромагнитные устройства автоматики, М. : Энергия, 1965, с. 80) равно:
F = Kтi2 (7) где Kт - коэффициент пропорциональности, т. е.
F= K [cos
[cos +cos2(ωt+α)-2cosαcos(ωt+α)] (8)
+cos2(ωt+α)-2cosαcos(ωt+α)] (8)
Амплитудное значение FА импульса тягового усилия F на интервалеt= 0 ÷  достигается при t=
достигается при t=  и равно
и равно
FА= K (1+cosα)2
(1+cosα)2
(9)
Из полученного выражения (9) следует, что при отклонении амплитуды UСА напряжения Uс от номинального значения при неизменном значении угла открытия α регулирующего тиристора 3 происходит существенное изменение амплитуды FА тягового усилия F электромагнитного привода, а следовательно, амплитуды механических колебаний вибропитателя 1. Это эквивалентно снижению точности управления возбуждением вибропитателя 1, поскольку параметры движения вибропитателя (виброскорость, виброускорение) зависят от амплитуды тягового усилия.
Из (9) также следует, что при отклонении амплитуды UСА напряжения Uс от номинального значения необходимо изменять угол α открытия регулирующего тиристора 3 таким образом, чтобы обеспечить равенство амплитуды FА тягового усилия F заданному значению.
В предлагаемом способе обеспечение равенства амплитуды FА тягового усилия F заданному значению, т. е. повышение точности управления возбуждением вибропитателя при отклонениях напряжения электрической сети переменного тока от номинального значения, осуществляют с использованием полученного соотношения (9) следующим образом.
Амплитудным детектором 14, подключенным к электрической сети 4 переменного тока, измеряют амплитудное значение UСА сети переменного тока, и на выходе амплитудного детектора 14 формируют сигнал VА, характеризующий измеренное амплитудное значение UСА.
Первым функциональным преобразователем 6 из сигнала Uу управления регулирующим тиристором 3 формируют сигнал cosK1Uу = cos α, а блоком 7 умножения - сигнал VА cosK1Uу. Полученный сигнал суммируют с сигналом VАв сумматоре 8, а из полученного сигнала VА(1 + cosK1Uу) вторым функциональным преобразователем 9 формируют сигнал fА, характеризующий амплитудное значение FА тягового усилия электромагнитного привода 2 вибропитателя 1
fА= K2V
Полученный сигнал fА сравнивают в элементе 10 сравнения с сигналом fАЗ, характеризующим заданное значение амплитуды тягового усилия (сигнал fАЗ может быть сформирован на шине 15 управления схемой технологической автоматики или задан вручную), и выявленное отклонение (fАЗ-fА) направляют на регулятор 11.
Выходной сигнал регулятора 11 в вычитателе 12 вычитают из опорного сигнала Uо, поступающего из источника 13 опорного сигнала, в результате чего на выходе вычитателя 12 появляется сигнал Uу управления регулирующим тиристором 3
Uу = Uo-Kp(fАЗ-fА), (10) где Kр - коэффициент передачи регулятора 11, который согласно (1) определяет угол α открытия регулирующего тиристора 3
α= K1[Uo-Kp(fАЗ-fА)] , (11)
Введение опорного сигнала Uо необходимо для согласования направления изменения выходного сигнала регулятора 11 с направлением изменения сигнала Uу, что необходимо для компенсации, выявленного в элементе 10 сравнения сигнала (fАЗ-fА). Например, при уменьшении сигнала fА, т. е. при увеличении сигнала (fАЗ-fА), сигнал Uу, как следует из (10), уменьшается, и соответственно, уменьшается угол α открытия тиристора 3, что приводит к увеличению амплитуды FА тягового усилия электромагнитного привода 2 и увеличению сигнала fА.
Таким образом, предлагаемый способ реализует принципы управления по отклонению. При этом управляемой величиной является амплитудное значение FА тягового усилия, а регулирующим воздействием - сигнал Uу управления регулирующим тиристором 3.
Возмущением, приводящим к отклонению управляемой величины от заданного значения, является отклонение напряжения электрической сети переменного тока от номинального значения. Сигнал же fА, характеризующий амплитудное значение FА тягового усилия, получают в предлагаемом способе по полученному нелинейному соотношению (9).
Введение в способ новой последовательности выполняемых действий и принципиально новых действий приводит к его выгодному отличию от известного способа (прототипа)
Анализ функционирования устройства, реализующего известный способ (прототип), показывает, что угол α открытия тиристора формируется по соотношению
α = K1[Uo-Kp(V3-Vд)] (12) где Vз - задающий сигнал;
Vд - сигнал, пропорциональный действующему значению напряжения электрической сети переменного тока.
Из (12) следует, что при отклонении сигнала Vд от номинального значения угол α открытия тиристора 3 изменяется в сторону компенсации отклонения амплитуды тягового усилия, возникшего при отклонении напряжения электрической сети переменного тока от номинального значения.
Действительно, при номинальном напряжении электрической сети (Vд = Vдн) и при некотором значении Vз угол α открытия будет равен
αн= K1[Uo-Kp(Vз-Vдн)]
При отклонении напряжения электрической сети от номинального значения, например, при Uс1 = Uсн + ΔUс, т. е. при Vд1 = Vдн + +ΔVд, получим
α1= K1[Uo-Kp(Vз-Vдн- ΔVд)] = αн+ K1Kp ΔVд (13)
Следовательно, при увеличении напряжения электрической сети переменного тока угол α открытия регулирующего тиристора в известном способе увеличивается пропорционально возникшему отклонению ΔUc, т. е. по линейному закону.
Однако из (9) следует, что при отклонении напряжения электрической сети от номинального значения (Uc1 = Uсн + ΔUс) амплитуды тяговых усилий соответственно будут равны:
FАН= K (1+cosαн)2 FA1= K
(1+cosαн)2 FA1= K (1+cosα1)2
(1+cosα1)2
Так как задача состоит в том, чтобы поддерживать величину FА на заданном значении, то должно выполняться равенство
FА1 = FАН откуда следует, что
α1= arccos (1+cosαн)-1
(1+cosαн)-1 , (14) т. е. для стабилизации тягового усилия корректирование должно осуществляться по нелинейному закону, определяемому соотношением (14). В прототипе же оно осуществляется по линейному закону (13), т. е. известный способ (прототип) не обеспечивает точности управления возбуждением вибропитателя. (56) Авторское свидетельство СССР N 481885, кл. G 05 D 15/01, 1975.
, (14) т. е. для стабилизации тягового усилия корректирование должно осуществляться по нелинейному закону, определяемому соотношением (14). В прототипе же оно осуществляется по линейному закону (13), т. е. известный способ (прототип) не обеспечивает точности управления возбуждением вибропитателя. (56) Авторское свидетельство СССР N 481885, кл. G 05 D 15/01, 1975.
Иванов К. А. Стабилизатор возбуждения вибробункера, Ж. Механизация и автоматизация производства, 1974, N 8, с. 18-19.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство питания электромагнитного вибровозбудителя | 1989 |
|
SU1644103A2 |
| СТАБИЛИЗАТОР НАПРЯЖЕНИЯ | 1997 |
|
RU2128393C1 |
| Устройство для регулирования частоты колебаний электромагнитного вибровозбудителя | 1976 |
|
SU632995A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ | 1990 |
|
RU2010186C1 |
| Способ управления @ -фазным тиристорным преобразователем | 1987 |
|
SU1522366A1 |
| Вибродатчик вязкости | 1978 |
|
SU775667A1 |
| Устройство для управления однообмоточным электромеханическим преобразователем | 1978 |
|
SU758456A1 |
| Вибропитатель | 1983 |
|
SU1154170A1 |
| Вибрационный каток | 1977 |
|
SU723018A1 |
| Устройство для управления весовым дозатором | 1984 |
|
SU1272313A1 |
Изобретение относится к технике автоматического управления колебательными объектами. С целью повышения точности управления возбуждением вибропитателя сигнал, характеризующий напряжение электрической сети переменного тока, питающей через регулирующий тиристор электромагнитный привод вибропитателя, формируют путем измерения амплитудных значений указанного напряжения, а сигнал управления регулирующим тиристором формируют путем вычисления сигнала, характеризующего амплитудное значение тягового усилия электромагнитного привода вибропитателя, выявления отклонения вычисленного сигнала от сигнала, характеризующего заданное значение амплитуды тягового усилия, и изменения сигнала управления регулирующим тиристором в сторону компенсации выявленного отклонения. 2 ил.
СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ ВИБРОПИТАТЕЛЯ С ТИРИСТОРНЫМ ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ, заключающийся в формировании сигнала, характеризующего напряжение питающей электрической сети переменного тока, формировании сигнала, характеризующего заданное значение амплитуды тягового усилия, и формировании в соответствии с этими сигналами сигнала управления регулирующим тиристором, отличающийся тем, что, с целью повышения точности, в качестве сигнала, характеризующего напряжение питающей электрической сети переменного тока, используют амплитудные значения указанного напряжения, а сигнал управления регулирующим тиристором формируют в соответствии с отклонением сигнала, характеризующего амплитудное значение тягового усилия, от сигнала, характеризующего заданное значение амплитуды тягового усилия, причем сигнал fа, характеризующий амплитудное значение тягового усилия, вычисляют в соответствии с соотношением
fа = K2Vа2(1 + cosK1Uу )2
где Vа - измеренное амплитудное значение напряжения питающей электрической сети переменного тока;
Uу - сигнал управления регулирующим тиристором;
K1, K2 - коэффициенты пропорциональности.
