to
149
СО
Изобретение относится к измерительной технике и предназначено для дозирования трудносыпучих продуктов и материалов, например короткорезанных макаронных изделий, хлопьевидных продуктов, и может найти применение в пищевой, химической и других отраслях промышленности.
Цель изобретения - повышение произ-. водительности дозатора.
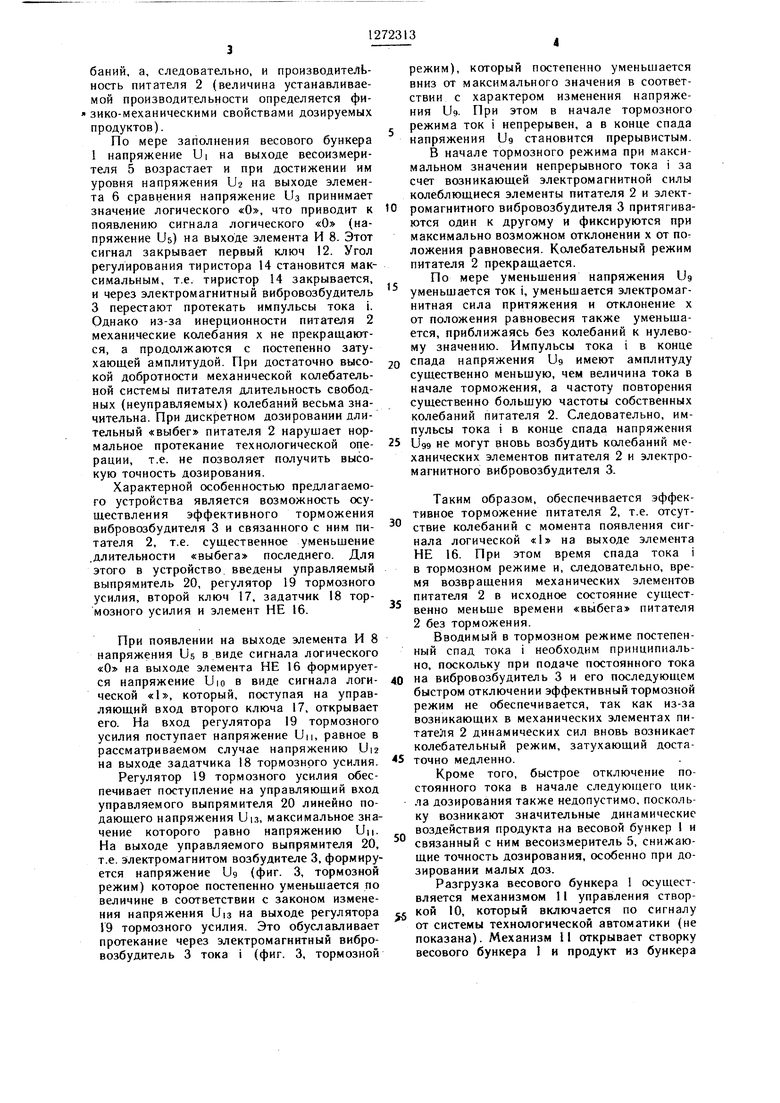
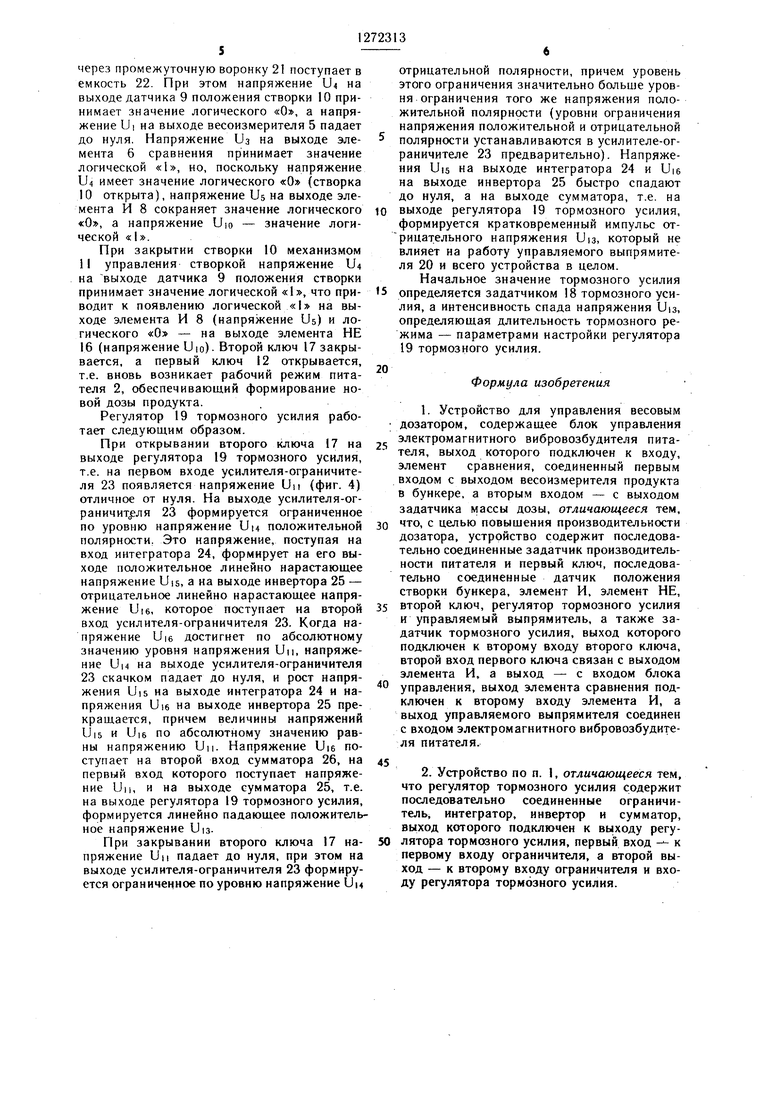
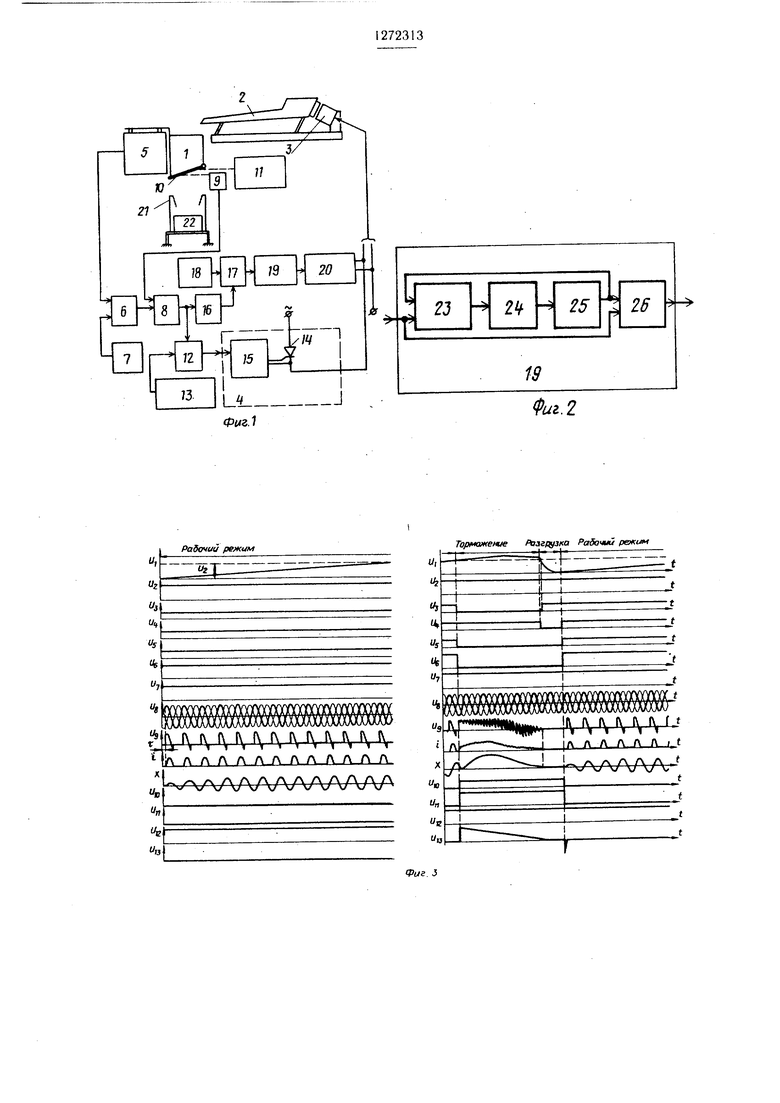
На фиг. 1 приведена блок-схема устройства; на фиг. 2 - блок-схема регулятора тормозного усилия; на фиг. 3 - эпюры сигналов на выходах элементов устройства; на фиг. 4 - эпюры сигналов на выходах элементов регулятора тормозного усилия.
Устройство для управления весовым дозатором (фиг. I) с весовым бункером 1 и питателем 2, оборудованным электромагнитным вибровозбудителем 3 с блоком 4 управления, содержит весоизмеритель 5, элемент 6 сравнения, задатчик 7 массы дозы, элемент И 8, датчик 9 положения створки 10 весового бункера , приводимой в движение от механизма 11 управления створкой 10, первый ключ 12, задатчик 13 производительности питателя 2. Блок 4 управления электромагнитным вибровозбудителем 3 содержит тиристор 14 со своим узлом 15 управления. Устройство содержит также элемент НЕ 16, второй ключ 17, задатчик 18 тормозного уси.тия, регулятор 19 тормозного усилия, управляемый выпрямитель 20, промежуточную воромку 21 и емкость 22.
Кроме того, в регуляторе 19 тормозного усилия (фиг. 2) установлены уснлитель-ог;раничитель 23, интегратор 24, инвертор 25 и сумматор 26.
Обозначены также (фиг. 3) напряжение Ui на выходе весоизмерителя 5, напряжение U2 на выходе задатчика 7 массы дозы, напряжение Us на выходе элемента 6 сравнения, напряжение U на выходе датчика 9 положения створки 10 весового бункера I, напряжение Us на выходе элемента И 8, напряжение Ue на выходе первого ключа 12, напряжение U на выходе задатчика 13 производительности питателя 2; напряжение Us питаюшей сети, напряжение Ug на электромагнитном вибровозбудителе 3, ток i через электромагнитный вибровозбудитель 3, механические колебания х вибровозбудителя 3, напр.яжение Uio на выходе элемента НЕ 16, напряжение Un на выходе второго ключа 17, напряжение Ui2 на выходе задатчика 18 тормозного усилия, напряжение U|3 на выходе регулятора 19 тормозного усилия.
На фиг. 4 обозначены напряжение Un на входе регулятора 19 тормозного усилия, т.е. на первом входе усилнтеля-ограничителя 23 (то же, что и напряжение Оц на выходе второго ключа 17, фиг. 3); напряжение и И на выходе усилителя-ограничителя 23, напряжение и 15 на выходе интегратора 24, напряжение Ute на выходе инвертора 25; напряжение Uia иа выходе регулятора 19
тормозного усилия, т.е. на выходе сумматора 26 (то же, что и напряжение Uis, фиг. 3). Устройство для управления весовым доЗатором работает следующим образом.
В весовой бункер 1 (фиг. I) с питателя 2,
оборудованного электромагнитным вибровоз будителем 3 с блоком 4 управления, поступает дозируемый продукт. Весовой бункер Г связан с весоизмерителем 5, выходной сигнал
с которого в виде напряжения Ui (фиг 3), пропорционального массе продукта в весовом бункере 1, поступает на первый вход элемента 6 сравнения, на второй вход которого с задатчика 7 массы дозы поступает напряжение U2, пропорциональное заданной массе дозы, причем заданное значение масы дозы меньше номинального его значения. На выходе элемента 6 сравнения формируется напряжение Us в виде сигнала логической «1, когда , и сигнала логического «О, когда . Напряжение Us
поступает на второй вход элемента И 8, на первый вход которого с выхода датчика 9 положения створки 10 весового бункера 1 поступает напряжение U4 в виде сигнала логической «1, когда створка 10 закрыта, и
сигнала логического «О, когда створка 10 открыта. Поскольку в процессе поступления продукта в весовой бункер I створка 10 закрыта, напряжение U4 принимает значение логической «1 н до тех пор, пока напряжение , т.е. до тех пор, пока на выходе
элемента 6 сравнения напряжение Us имеет значение логической «1, на выходе элемента И 8 формируется сигнал логической «1 в виде напряжения Us, отличного от нуля.
Напряжение Us поступает на управляющий вход первого ключа 12, открывая его. На выходе первого ключа 12 формируется напряжение Ue, равное напряжению U, поступающему на сигнальный вход этого
ключа с выхода задатчика 13 производительности питателя 2. Величина напряжения Ue определяет величину угла регулирования тиристора 14, установленного совместно со своим узлом 15 управления в блоке 4 управления вибровозбудителем, и на электромагнитном вибровозбудителе 3 из напряжения Us питающей сети формируется напряжение Ug (фиг. 3, рабочий режим). Под действием напряжения Ug через электромагнитный вибровозбуднтель 3 протекают импульсы тока i, приводящие к механичесКИМ колебаниям х вибровозбудителя 3 и связанного с ним питателя 2 (фиг. 3, рабочий режим). В зависимости от величины напряжения Ue, равного при открытом первом ключе 12 напряжению U, изменяется
величина запаздывания включения тиристора 14, где а - угол регулирования тиристора 14,(О - круговая частота питающей сети, и амплитуда механических колебаний, а, следовательно, и производительность питателя 2 (величина устанавливаемой производительности определяется физико-механическими свойствами дозируемых продуктов).
По мере заполнения весового бункера 1 напряжение Ui на выходе весоизмерителя 5 возрастает и при достижении им уровня напряжения U2 на выходе элемента 6 сравнения напряжение Из принимает значение логического «О, что приводит к появлению сигнала логического «О (напряжение Us) на выходе элемента И 8. Этот сигнал закрывает первый ключ 12. Угол регулирования тиристора 14 становится максимальным, т.е. тиристор 14 закрывается, и через электромагнитный вибровозбудитель 3 перестают протекать импульсы тока i. Однако из-за инерционности питателя 2 механические колебания х не прекращаются, а продолжаются с постепенно затухающей амплитудой. При достаточно высокой добротности механической колебательной системы питателя длительность свободных (неуправляемых) колебаний весьма значительна. При дискретном дозировании длительный «выбег питателя 2 нарушает нормальное протекание технологической операции, т.е. не позволяет получить высокую точность дозирования.
Характерной особенностью предлагаемого устройства является возможность осуществления эффективного торможения вибровозбудителя 3 и связанного с ним питателя 2, т.е. существенное уменьшение длительности «выбега последнего. Для этого в устройство введены управляемый выпрямитель 20, регулятор 19 тормозного усилия, второй ключ 17, задатчик 18 тормозного усилия и элемент НЕ 16.
При появлении на выходе элемента И 8 напряжения Us в виде сигнала логического «О на выходе элемента НЕ 16 формируется напряжение Uio в виде сигнала логической «1, который, поступая на управляющий вход второго ключа 17, открывает его. На вход регулятора 19 тормозного усилия поступает напряжение Un, равное в рассматриваемом случае напряжению Uiz на выходе задатчика 18 тормозного усилия.
Регулятор 19 тормозного усилия обеспечивает поступление на управляющий вход управляемого выпрямителя 20 линейно подающего напряжения Uis, максимальное значение которого равно напряжению Un. На выходе управляемого выпрямителя 20, т.е. электромагнитом возбудителе 3, формируется напряжение Ug (фиг. 3, тормозной режим) которое постепенно уменьшается по величине в соответствии с законом изменения напряжения Uis на выходе регулятора 19 тормозного усилия. Это обуславливает протекание через электромагнитный вибровозбудитель 3 тока i (фиг. 3, тормозной
режим), который постепенно уменьшается вниз от максимального значения в соответствии с характером изменения напряжения Ug. При этом в начале тормозного
режима ток i непрерывен, а в конце спада напряжения Ug становится прерывистым. В начале тормозного режима при максимальном значении непрерывного тока i за счет возникающей электромагнитной силы колеблющиеся элементы питателя 2 и электромагнитного вибровозбудителя 3 притягиваются один к другому и фиксируются при максимально возможном отклонении х от положения равновесия. Колебательный режим питателя 2 прекращается.
По мере уменьшения напряжения Ug уменьшается ток i, уменьшается электромагнитная сила притяжения и отклонение х от положения равновесия также уменьшается, приближаясь без колебаний к нулевому значению. Импульсы тока i в конце
0 спада напряжения Ug имеют амплитуду существенно меньшую, чем величина тока в начале торможения, а частоту повторения существенно большую частоты собственных колебаний питателя 2. Следовательно, импульсы тока i в конце спада напряжения
5 Ugg не могут вновь возбудить колебаний механических элементов питателя 2 и электромагнитного вибровозбудителя 3.
Таким образом, обеспечивается эффективное торможение питателя 2, т.е. отсут ствие колебаний с момента появления сигнала логической «1 на выходе элемента НЕ 16. При этом время спада тока i в тормозном режиме и, следовательно, время возвращения механических элементов питателя 2 в исходное состояние существенно меньше времени «выбега питателя 2 без торможения.
Вводимый в тормозном режиме постепенный спад тока i необходим принципиально, поскольку при подаче постоянного тока 0 на вибровозбудитель 3 и его последующем быстром отключении эффективный тормозной режим не обеспечивается, так как из-за возникающих в механических элементах питатеЛя 2 динамических сил вновь возникает колебательный режим, затухающий доста5 точно медленно.
Кроме того, быстрое отключение постоянного тока в начале следующего цикла дозирования также недопустимо, поскольку возникают значительные динамические воздействия продукта на весовой бункер I и связанный с ним весоизмеритель 5, снижающие точность дозирования, особенно при дозировании малых доз.
Разгрузка весового бункера 1 осуществляется механизмом 11 управления створg кой 10, который включается по сигналу от системы технологической автоматики (не показана). Механизм 11 открывает створку весового бункера 1 и продукт нз бункера
через промежуточную воронку 21 поступает в емкость 22. При этом напряжение U4 на выходе датчика 9 положения створки 10 принимает значение логического «О, а напряжение U| на выходе весоизмерителя 5 падает до нуля. Напряжение Us на выходе элемента 6 сравнения принимает значение логической «1, но, поскольку напряжение U4 имеет значение логического «О (створка
10открыта), напряжение Us на выходе элемента И 8 сокраняет значение логического «О, а напряжение Uio - значение логической «I.
При закрытии створки 10 механизмом
11управления створкой напряжение U4 на выходе датчика 9 положения створки принимает значение логической «1, что приводит к появлению логической «I на выходе элемента И 8 (напряжение Us) и логического «О - на выходе элемента НЕ
16 (напряжение и 1о). Второй ключ 17 закрывается, а первый ключ 12 открывается, т.е. вновь возникает рабочий режим питателя 2, обеспечивающий формирование новой дозы продукта.
Регулятор 19 тормозного усилия работает следующим образом.
При открывании второго ключа 17 на выходе регулятора 19 тормозного усилия, т.е. на первом входе усилителя-ограничителя 23 появляется напряжение Un (фиг. 4) отличное от нуля. На выходе усилителя-ограничит ля 23 формируется ограниченное по уровню напряжение Uu положительной полярности, Это напряжение, поступая на вход интегратора 24, формирует на его выходе положительное линейно нарастающее напряжение Uis, а на выходе инвертора 25 - отрицательное линейно нарастающее напряжение и 16, которое поступает на второй вход усилителя-ограничителя 23. Когда напряжение и 16 достигнет по абсолютному значению уровня напряжения Un, напряжение Ui4 на выходе усилителя-ограничителя 23 скачком падает до нуля, и рост напряжения U|5 иа выходе интегратора 24 и напряжения и 16 на выходе инвертора 25 прекращается, причем величины напряжений Ui5 и U|6 по абсолютному значению равны напряжению Un. Напряжение Uie поступает на второй вход сумматора 26, на первый вход которого поступает напряжение Un, и на выходе сумматора 25, т.е. на выходе регулятора 19 тормозного усилия, формируется линейно падающее положительное напряжение Ui3.
При закрывании второго ключа 17 иапряжение Un падает до нуля, при этом на выходе усилителя-ограничителя 23 формируется ограниченное по уровню напряжение UM
отрицательной полярности, причем уровень этого ограничения значительно больше уровня ограничения того же напряжения положительной полярности (уровни ограничения напряжения положительной и отрицательной полярности устанавливаются в усилителе-ограничителе 23 предварительно). Напряжения Ui5 на выходе интегратора 24 и Uie на выходе инвертора 25 быстро спадают до иуля, а на выходе сумматора, т.е. на выходе регулятора 19 тормозного усилия, формируется кратковременный импульс отрицательного напряжения Uu, который не влияет на работу управляемого выпрямителя 20 и всего устройства в целом.
Начальное значение тормозного усилия определяется задатчиком 18 тормозного усилия, а интенсивность спада напряжения Uis, определяющая длительность тормозного режима - параметрами настройки регулятора 19 тормозного усилия.
Формула изобретения
1.Устройство для управления весовым дозатором, содержащее блок управления электромагнитного вибровозбудителя питателя, выход которого подключен к входу, элемент сравнения, соединенный первым входом с выходом весоизмерителя продукта в бункере, а вторым входом - с выходом задатчика массы дозы, отличающееся тем, что, с целью повышения производительности дозатора, устройство содержит последовательно соединенные задатчик производительности питателя и первый ключ, последовательно соединенные датчик положения створки бункера, элемент И, элемент НЕ, второй ключ, регулятор тормозного усилия и управляемый выпрямитель, а также задатчик тормозного усилия, выход которого подключен к второму входу второго ключа, второй вход первого ключа связан с выходом элемента И, а выход - с входом блока управления, выход элемента сравнения подключен к второму входу элемента И, а выход управляемого выпрямителя соединен с входом электромагнитного вибровозбудителя питателя.
2.Устройство по п. 1, отличающееся тем, что регулятор тормозного усилия содержит последовательно соединенные ограничитель, интегратор, инвертор и сумматор, выход которого подключен к выходу регулятора тормозного усилия, первый вход -- к первому входу ограничителя, а второй выход - к второму входу ограинчителя и входу регулятора тормозного усилия.
Радочиа режим
1
4 %
ЧАУ V VWV U VV и V vVVV чЛЛЛЛЛЛ/VU V VV VA-f
allv
Л /у Д А JVJV-/ 7VJV/VJ4 Я
-v WWWWWV
ю
я Ue а
TopMOfHEHue Лагдузка Рабочий режим
j
У
аЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электромагнитным вибровозбудителем питателя | 1984 |
|
SU1177235A1 |
| Электромагнитный вибропривод транспортирующего устройства | 1983 |
|
SU1148821A1 |
| Способ управления процессом весового порционного дозирования сыпучих материалов | 1987 |
|
SU1500852A1 |
| Устройство управления весовым дозатором | 1977 |
|
SU673993A1 |
| Устройство для управления приводом робота | 1988 |
|
SU1580317A1 |
| Синхронно-синфазный электромагнитный вибропривод | 1980 |
|
SU964885A1 |
| Устройство для регулирования амплитуды колебаний электромагнитных вибровозбудителей | 1981 |
|
SU966670A1 |
| Широтно-импульсный модулятор для управления усилителем мощности | 1989 |
|
SU1718375A1 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Регулятор компенсирующего устройства | 1990 |
|
SU1721705A2 |
Изобретение относится к измерительной технике и предназначено для дозирования трудносыпучих продуктов и материалов, например короткорезанных макаронных изделий, хлопьевидных продуктов, и может найти применение в пищевой, химической и других отраслях промышленности. Цель изобретения - повышение пронзводительности дозатора. Устройство для управления весовым дозатором с весовым бункером и питателем оборудовано электромагнитным вибровозбудителем с блоком управления, содержащим весоизмеритель, элемент сравнения и задатчик массы дозы. Новым является введение в устройство управляющего выпрями-, теля, задатчиков производительности питателя и тормозного усилителя, регулятора .тормозного усилия, первого и второго ключей, элемента И, элемента НЕ и дат- чнка положения створки весового бункера. Кроме того, в регуляторе тормозного усилия установлены усилитель-ограничитель, интегратор, инвертор и сумматор. 1 з.п. ф-лы, (Л 4 нл.
| 0 |
|
SU385177A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для весового дозирования | 1977 |
|
SU684321A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
