(54) ВИБРОДАТЧИК ВЯЗКОСТИ


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения плотности и вязкости жидких сред | 1982 |
|
SU1092377A1 |
| Вибрационный вискозиметр | 1989 |
|
SU1749777A1 |
| Вибрационное устройство для уплотнения бетонной смеси | 1984 |
|
SU1217670A2 |
| Устройство управления электромагнитной установкой для испытания материалов на усталость | 2021 |
|
RU2771408C1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| ВИБРОВИСКОЗИМЕТРИЧЕСКИЙ ДАТЧИК | 2008 |
|
RU2419781C2 |
| Устройство для измерения сдвиговой вязкости и упругости сред | 1976 |
|
SU682796A1 |
| Электромагнитный вибропривод транспортирующего устройства | 1983 |
|
SU1148821A1 |
| Устройство для программных испытаний изделий в автоколебательном режиме | 1986 |
|
SU1402821A1 |
| Вибрационный эластовискозиметр | 1976 |
|
SU567119A1 |
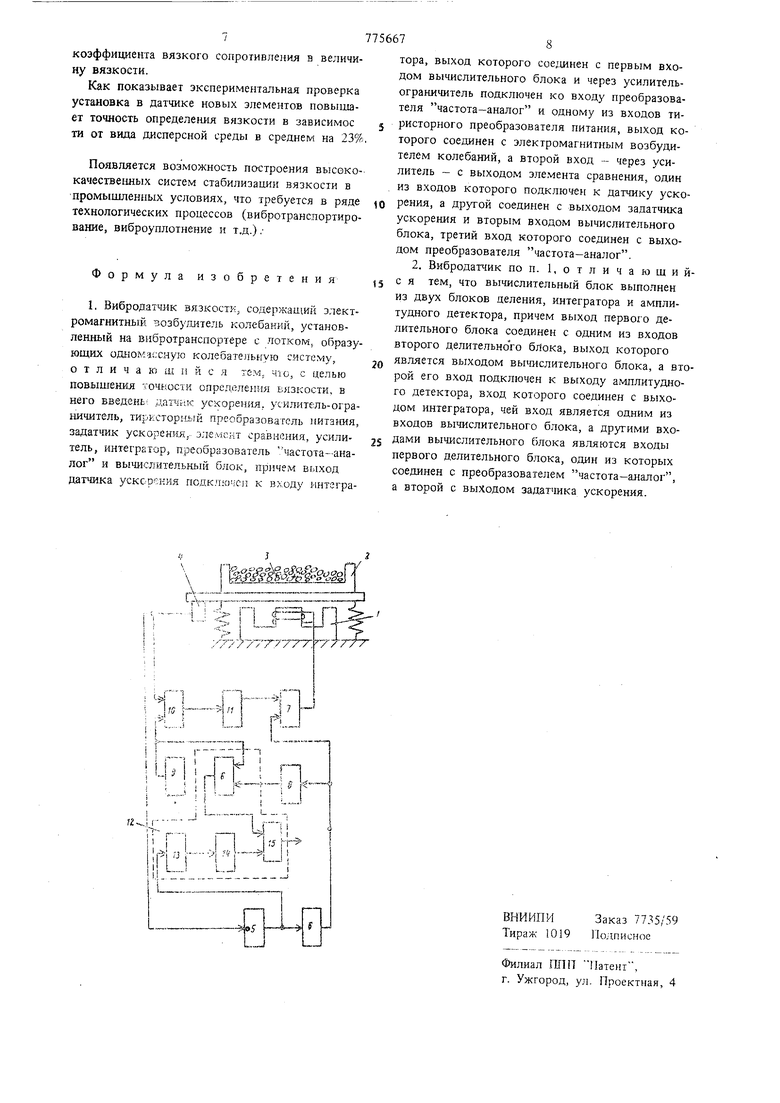
Изобретение относится к области определения вязкости дисперсных сред, например, руды песка, бетонной смеси при их вибрационном перемещении, и может применяться в системах контроля и автоматического регулирования вязкости в горнорудной, строительной, пищевой и других отраслях промышленности. Известен вибродатчнк вязкости, использующий для ее определения вибрационное воздействие на среду колебаниями заданной форм и содержащий два стержня, корпус и электромагнитную систему возбуждения. При применении вибродатчика стержни погружают в среду, вязкость которой измеряют, и по изменению параметров колебательной системы, связанному с величиной вязкости, определяют ее значение. Недостатком указанного датчика является трудность его применения при определении вяз кости дисперсных сред непосредственно в процессе их перемещения. Позтому при определении вязкости, дисперсных сред непосредственно в процессе их перемещения целесообразно использование устройств, в которых oTcjTCTBy- . ют погружаемые в среду элементы датчика. Близким к предлагаемому по технической сущности является устройство для определения вязкости, содержащее вибротранспортер с лотком, имеющим боковые стенки, выполненный в виде двухмассной колебательной системы. В указанном устройстве регулируют частоту возмущающей силы, измеряют частоту и амплитуду антирезонанса подвижной части вибротранспортера и расчетным путем по формуле для двухмассной колебательной системы определяют вязкость дисперсной среды. - Недостатком устройства является низкая точность определения вязкости. Он обусловлен тем, что устройство не учитывает специфического явления, возникающего в процессе вибрационного воздействия и Ьостоящего в изменении вязкости при изменении ускорения ХдО; развиваемого в колебательной системе (х - амплитуда колебаний, со - частота возмущающей силы) Поскольку в известном устройстве изменение частоты со лежит в основе его приши-iiia действия, вязкость оказывается существенно зависящей от параметров колебаний, в частности, зависимость вязкости от квадрата частоты со приводит к существенным ошибкам при ее определении. Дополнительным источником ошибки при определении вязкости известным устройством является нестабильность погонной нагрузки на вибротранспортере, что влияет на частоту и амплитуду антирезонанса. Цель изобретения - повышение точности определения вязкости. Поставленная цель достигается тем, что в вибродатчике вязкости, содержащем электромаг нитный возбудитель колебаний, установленный на вибротранспортере с лотком, образующих одномассную колебательную систему, введены датчик ускорения, усилитель-ограничитель, тиристоркый преобразователь питания, задатшк ускорения, элемент сравнения, усилитель, интег ратор, преобразователь частота-аналог и вычислительный блок, причем выход датчика ускорения подключен к входу интегратора, выход которого соединен с первым входом вычислительного блока и через усилитель-ограшпштель подключен ко входу преобразователя частотааналог и одному из входов тиристорного преобразователя питания, выход которого соединен с электромагнитным возбудителем колебаний, .а второй вход - через усилитель - с выходом элемента сравнения, один из вхоцок которого подключен к датчику ускорения, а другой соединен с выходом задатчика ускорения и вторым входом вычислительного блока, третий вход которого соединен с выходом преобразователя частота-аналог. Кроме того, вычислительный блок вьпюлнен из двух блоков деления, интегратора и амплитудного детектора, причем первого дели тельного блока соединен с одним из входов второго делительного блока, выход которого является выходом вычислительного блока, а второй его вход, подключен к выходу амплитудного детектора, вход которого соединен с выходом интегратора, чей вход является одним из входов вытаслительного блока, а другими входами вышслительного блока являются входы первого делительного блока, один из кото рых соединен с преобразователем частота-ана. лог, а второй с выходом задатчика ускорения На чертех е представлена функциональная, .дсема вибродатчика. Вибродат1шк содержит электромагнитный воз будитель колебаний 1. Вибротранспортер с лотком 2, дисперсную среду 3, датчик ускорения интегратор 5. усилктель-ограничитель 6,тиристор ный преобразователь питания , преобразователь 8 частота-аналог, задатчик ускорения 9 элемент сравнения 0, усилитель 11, вычислительный блок 12, второй интегратор 13, ампли удный детектор 14, второй делительный блок 5, первый делительный блок 16. Вибродатчик вязкости использует характерные ля одномассной колебательной системы соотошения и работает следующим образом. При протекании тока по обмотке электромагитного возбудителя 1 колебаний, изменяющеося, например, по гармоническому закону, возикает тяговое усилие, которое приводит виботранспортер с лотком 2 и находящейся в отке дисперсной средой 3, вязкость которой ребуется определять, в колебательное движеиеm X-t-bx- С X wt, (j де m - масса вибротранспортера с лотком и дисперсной средой; b - коэффициент вязкого сопротивления, зависящий от вязкости среды; с - коэффициент жесткости, связаншлй с наличием упругих элементов у возбудителя; X - перемещение лотка во времени; F - амплитуда тягового усилия (возмущающей силы); OJ - частота возмуидающей силы. Вводя коэффициент демпфированияVi -2 урав/ . нение (1) приводится к виду alxcos Cot, (2) где Wj,,TJ - некоторая характерная для одномассной колебательной системы частота, зависящая от параметров системы. В установившемся режиме лоток будет колебаться с амплитудой . Xci ., (3). m-iia}n i- а фазовый сдвиг между возмущающей силой и перемещенлем лотка составит Cf -arctpJ -о Ь COo-GJ В уравнения (3) и (4) коэффициент вязкого сопротивления, зависящий от вязкости среды, входит сложным образом, что усложняет построение технического устройства, вырабатывающего сигнал, пропорциональный коэффициенту вязкого сопротивления. В предложенном вибролатчике вязкости используется характерная особенность частоты ojo, состоящая в том, что колебания на этой частоте происходят при угле фазового сдвига Ф , равном -- , что следует из уравнения (4) при О) сод. При этом упрощается зависимость амплитуды колебаний от коэффициента вязкого сопротивления (5) что следует из уравнения (3) при со WO,H, соответственно, коэффициент вязкого сопротивленияЪ,(6) что существенно проще определения коэффициента b из уравнения (3). Практическая реализация колебаний с углом фазового сдвига, равным - , осуществляется замкнутым автоколебательным контуром, в ко торый, кроме электромагнитного возбудителя 1 с лотком 2 и средой 3, входит датчик ускорения 4, установленный на вибротранспортере с JTOTKOMJ интегратор 5, усилитель-ограничитель 6 тиристорный преобразователь питания 7. Гармо нический сигнал с выхода интегратора 5, пропорциональный скорости перемещения лотка, усилителем-ограничителем 6 преобразует в последовательность прямоугольных однополярных импульсов, длительность которых составляет половину периода входного сигнала, В тиристор ном преобразователе 7 импульсы усиливаются по мощности и, поступая на возбудитель 1, вы зывают протекание по его обмотке импульсов тока. Возникают импульсы тягового усилия, приводящие благодаря наличию упругих элемен тов к колебательному перемещению лотка. Поскольку сигнал на выходе интегратора 5 пропорционален скорости перемещения лотка, а усилитель-ограничитель 6 и тиристорный преобразователь питания 7 фазовых сдвигов не вносят, возникает фазовый сдвиг, равный , между тяговым усилием (возмущающей силой) и перемещением лотка, т.е. колебания возбудителя 1 устанавливаются на частоте WQ. При соответствующем выборе характеристик усилителя-ограничителя и тиристорного преобразователя питания возникший автоколебательный режим с частотой WQ будет устойчивым. Значение же частоты OJQ изменении массы среды 3, находящейся в лотке 2, будет изменяться, что оказывает положительное влияние на работу вибродатчика вязкости, так как обес печивается автоматическая коррекция выходного сигнала датчика по изменению массы среды, т.е. учитывается возможная нестабильность погонной нагрузки на вибротранспортере, являющаяся одним из источников погрецшости при определении вязкости известным устройством. Для получения сигнала, пропорционального частоте Wo, используется преобразователь 8 частота-аналог, подключенный к выходу усилителя-ограничителя 6. Для устранения влияния на точность определенкя вязкости другого источника погрешности - переменного значения ускорения, равного в рассматриваемом датчике значению используется контур стабилизации велищны ускорения, в который входят датчик ускорения 4, задатчик ускорения 9, элемент сравнения 10, усилитель 11, тиристорный преобразователь питания 7. Требуемое значение ускорения ХдЫо устанавливается задатчиком ускорения 9. Если по каким-либо причинам, напри-, мер, из-за изменения соо, величина ускорения ХдСОо изменится, то возникишй сигнал рассогласования с выхода элемента сравнения 10 через усилитель 11 изменит величину мощности, передаваемой тиристорным преобразователем питания 7 электромагнитному возбудителю колебаний 1. Это приведет к изменению амплитуды х колебаний и, следовательно, к восстановлению заданного значещм . Для вычислений коэффициента вязкого сопротивления, зависящего от вязкости, по формуле (6) используются вычислительный блок 12 включающий.в себя первый делительный блок 16, интегратор 13, амплитудный детектор 14 и второй делительный блок 15. На первый вход первого делительного блока 16 с задатчика ускорения 9 поступает сигнал, пропорциональный значению ускорения Шо, а на второй вход - сигнал, пропорциональный соо с преобразователя 8 частота-аналог. На выходе блока 16 вырабатывается сигнал , поступающий на первый вход второго делительного блока 15. На второй вход второго делительного блока 15 поступает сигнал, пропорциональный амплитуде колебаний х лотка и соответственно пропорциональный амплитуде тягового усилия F,. Для выработки сигнала, поступающего на второй вход, используются последовательно соединенные второй интегратор 13, на выходе которого сигнал изменяется по гармоническому У амплитудный детектор 14, включен«ьш между выходом интегратора и вторым входом второго делительного блока 15. На выходе второго делительного блока 15 формируется сигнал, пропорциональный -53 пропорциональный коэффициенту вязкого сопротивления Ь.,. Определение вязкости по значению коэффициента вязкого сопротивления производится по тарировочным кривым, предварительно снятым в промышленных или лабораторных условиях. Для использования датчика в системах автоматического управления возможно включение на выходе блока 15 преобразователя величины
