Изобретение относится к судостроению, в частности к средствам освоения океана и гидротехническим сооружениям, и предназначено для уменьшения возмущающего воздействия воды на полупогруженные плавучие сооружения типа буровых и океанологических стабилизированных платформ, свободно дрейфующих и заякоренных буев, а также уменьшения их вертикальной качки.
Известно устройство по уменьшению параметров качки за счет увеличения коэффициента сопротивления объекта. Оно реализовано в устройствах типа вехи Фруда, которая должна плавать в полупогруженном состоянии. Она содержит длинный полупогруженный вертикальный цилиндр небольшого диаметра, к нижней части которого на длинном тросике подвешен гидродинамический демпфр с грузом [1] .
Веха Фруда работает по отношению к волне как фильтр высокочастотных колебаний.
Аналогично решается задача уменьшения вертикальных колебаний в цилиндическом вертикальном буе Вудс-Хоулского океано-графического института.
Отличительные особенности технического решения, применяемого в вехе и буе: используется полупогруженный вертикальный цилиндр небольшого сечения длиной не менее ожидаемой в данном регионе высоты волн; на глубине не менее 0,5 длины ожидаемых в регионе волн (на такую глубину волны уже не проникают) на тросе подвешивается демпфер (парусиновый лист в жесткой раме) площадью в 30-40 раз больше площади поперечного сечения вехи. Вся конструкция в полупогуженном состоянии удерживается за счет положительной плавучести вертикального цилиндра и отрицательной плавучести демпфера с подвесным балластом; уменьшение возмущающего воздействия волн на вертикальный цилиндр достигается только за счет уменьшения диаметра цилиндра; принцип работы конструкции - пассивная фильтрация колебаний за счет резкого увеличения инерционности всей системы.
Данное техническое решение при всей его простоте имеет ряд недостатков: ограниченную применимость для буев, не требующих больших полезных объемов и масс для размещения оборудования и экипажа; техническую сложность применения для океанологических и буровых платформ, т. к. при диаметре вертикальной колонны в 1,5-2 м площадь демпфера оказывается очень большой.
Известны океанологические станции и платформы, представляющие собой вертикальные конструкции. Таковы, например, платформы типа "Буй-лаборатория", "Спар", "Флип" [2] . Они педставляют собой буксируемые в горизонтальном положении сооружения, состоящие из двух цилиндрических частей разного сечения. Для перевода в рабочее состоянии более толстая часть заполняется водным балластом, и платформа принимает вертикальное положение. Поверхность пересекает узкая часть диаметром 1,8-4,5 м. В нижней части диаметром в 2-3,5 раза большем располагаются балластные цистерны, запасы топлива, механизмы и пр. В этих конструкциях также используется пассивный принцип гашения качки: грушевидная нижняя часть обладает большой присоединенной массой, а поверхность пересекает цилиндр небольшого диаметра. За счет этого, как и в случае вехи Фруда, создаются условия, когда объект (платформа) слабо реагирует на возмущающую силу, имеющую частоту в 2-3 раза большую частоты собственных колебаний.
По сравнению с буями и вехой Фруда увеличение периода собственных колебаний этих сооружений достигается за счет увеличения виртуальной присоединенной массы (массы воды, вытесненной погруженным объемом, плюс присоединенная масса), выбором формы подводной части. Но при этом гидравлическое сопротивление колебаниям платформ невелико, демпферов они не имеют. Поэтому при неволновом возмущении (например при большой скорости заполнения цистерн главного балласта) возможны длительные колебаний большой амплитуды.
Недостаток устройства по стабилизации таких платформ еще и в том, что оно тебует заглубления на 40-60 м центра стабилизирующего объема. Поэтому платформы могут применяться только на больших глубинах. По прежнему действует ограничение - малая площадь ватерлинии и большой диаметр глубокопогруженного утолщения. Принцип уменьшения качки - пассивная фильтрация.
Прототипом изобетения является полупогруженное основание морского сооружения, содержащее водоизменяющую цилиндрическую колонну, пересекающую свободную поверхность воды, рабочую площадку над ней и расположенный на ней под свободный повехностью демпфер [3] .
Недостатком известного устройства является то, что расчетные выражения для поля давлений в волнах, а также сил, которые положены в основу известного решения, слишком упрощены. Поэтому минимизация вертикальной качки на их основе не может дать точного результата. Упрощенное представление сил (учитываются лишь силы давления) ограничила и конструктивные пути решения задачи только за счет сил давления на водоизмещающих объемах.
Цель изобретения - расширение функциональных возможностей конструктивных путей борьбы с волновыми нагрузками и повышение точности стабилизации плавучих конструкций от вертикальной качки на волнении.
Технический результат данного изобретения достигоается тем, что в полупогруженном основании моского сооружения, содержащем по меньшей мере одну водоизмешающую цилиндрическую колонну, пересекающую свободную поверхность воды, рабочую площадку над ней и расположенный на ней под свободной поверхностью воды демпфер, длина погруженной части колонны и высота надводной ее части до рабочей площади составляет не менее 1,25-1,5 расчетной амплитуды волны, демпфер установлен на глубине 1,25 расчетной амплитуды волны и выполнен пассивно-активным. Изобретение снабжено устройство минимизации возмущающего воздействия волн на нерасчетном волнении.
Кроме того, пассивно-активный демпфер (ПАД) выполнен в виде плоского диска, причем его площадь SПАД ≈0,137-0,147/xS1˙λp, где S1 - площадь поперечного сечения колонны, определяемая из условия плавучести всей конструкции, λp - расчетная длина волны.
Кроме того, ПАД выполнен в виде объемного цилиндрического кольца, причем его объем VПАД ≈ (0,148-0,151) (1+К22)-1 ˙S1 ˙λp, где К22 ≈ 0,7-0,9 коэффициент присоединенной массы объемного ПАДа, зависящий от формы и соотношения разности наружного и внутреннего диаметра и его высоты.
Кроме того, ПАД выполнен в виде цилиндра, продольная ось которого ориентирована горизонтально, причем его радиус r2 и длина l2определяются соотношением
r

 = /0,256-0,266/·S1·λp
= /0,256-0,266/·S1·λp
Кроме того, устройство минимизации возмущающего воздействия волн на полупогруженное основание включает в себя электрический измеритель параметров набегающих волн, блок их обработки и получения наиболее вероятной длины и амплитуды, измеритель заглубления полупогруженного основания источник электоэнегии, блок оптимизации, балластную цистену с клапанами ее заполнения и осушения и блок автоматической балластировки. Измеритель параметров волн электрически связан с блоком оптимизации и измерителем заглубления, а блок оптимизации связан с блоком автоматической балластировки, при этом последний связан с клапанами заполнения и осушения балластной цистерны.
На фиг. 1 изображено полупогруженное основание морского сооружения; на фиг. 2 - веха с объемным пассивно-активном демпфером; на фиг. 3 - веха с плоским пассивно-активным демпфером; на фиг. 4 - веха с пассивно-активным демпфером в виде цилиндра.
Полупогруженное основание содержит водоизмещающую колонку 1, пересекающую свободную поверхность воды, расположенный на ней под свободной поверхностью воды демпфер 2. Длина погруженной части составляет не менее 1,25-1,5 расчетной амплитуды волны. Демпфер 2 установлен на глубине 1,25 расчетной амплитуды волны и выполнен пассивно-активным. Оно содержит также устройство минимизации возмущающего воздействия волн на полупогруженное основание на нерасчетном волнении, включающее в себя электрический измеритель 3 параметров набегающих волн блок 4 их обработки, измеритель 5 заглубления полупогруженного основания, источник 6 электроэнергии, блок 7 оптимизации, балластную цистерну 8 и блок 9 автоматической балластировки.
Устройство работает следующим образом. Перед выставлением буя или вехи с судна-носителя определяют параметры волнения и оптимальное заглубление ПАД, принимают необходимое количество балласта, обеспечивающее нужную осадку T буя. В таком состоянии буй сбрасывают с судна и он начинает работать. Источник 6 энергии начинает вырабатывать электроэнергию, которая будет идти на работу измерителя 3, блока 4 определения математического ожидания амплитуды  , длины набегающих волн
, длины набегающих волн  , измерителя 5 заглубления вехи и других схем и систем вехи. Сигналы от блоков 4 и 5 поступают в блок 7 оптимизации режима позиционирования вехи и выработки управляющего сигнала для блока 9 автоматической балластировки вехи.
, измерителя 5 заглубления вехи и других схем и систем вехи. Сигналы от блоков 4 и 5 поступают в блок 7 оптимизации режима позиционирования вехи и выработки управляющего сигнала для блока 9 автоматической балластировки вехи.
В блоке 7 для уже известных размеров вехи (радиусе вертикального цилиндра r, его длине l, площади SПАД и объема V2 ПАД, коэффициентах присоединенных инерцией) и на основе ниже приведенных выражений (1) для объемного ПАДа (2) для плоского бортовая мини ЭВМ искать для конкретных  и
и  получаемых от блока 4, оптимальное заглубление ПАД или осадку вехи
получаемых от блока 4, оптимальное заглубление ПАД или осадку вехи  .
.
В блоке 9 происходит сравнение текущей осадки  , получаемой из блока 5 и Торt, получаемой из блока оптимизации 7 и вырабатывается сигнал на прием (откачку) воды Δ Q.
, получаемой из блока 5 и Торt, получаемой из блока оптимизации 7 и вырабатывается сигнал на прием (откачку) воды Δ Q.
В соответствии с этим сигналом происходит прием (откачка) водяного балласта в цистерну 8. Для того, чтобы система не работала непрерывно в блоке 9, должно быть предусмотрено заглубление сигнала от разности  =
=  -
- .
.
Изобретение опирается на полную структуру возмущающего воздействия волн на полупогруженные вертикальные цилиндрические тела и полностью погруженные плоские или объемные демпферы, выполняющие роль разгрузочных элементов.
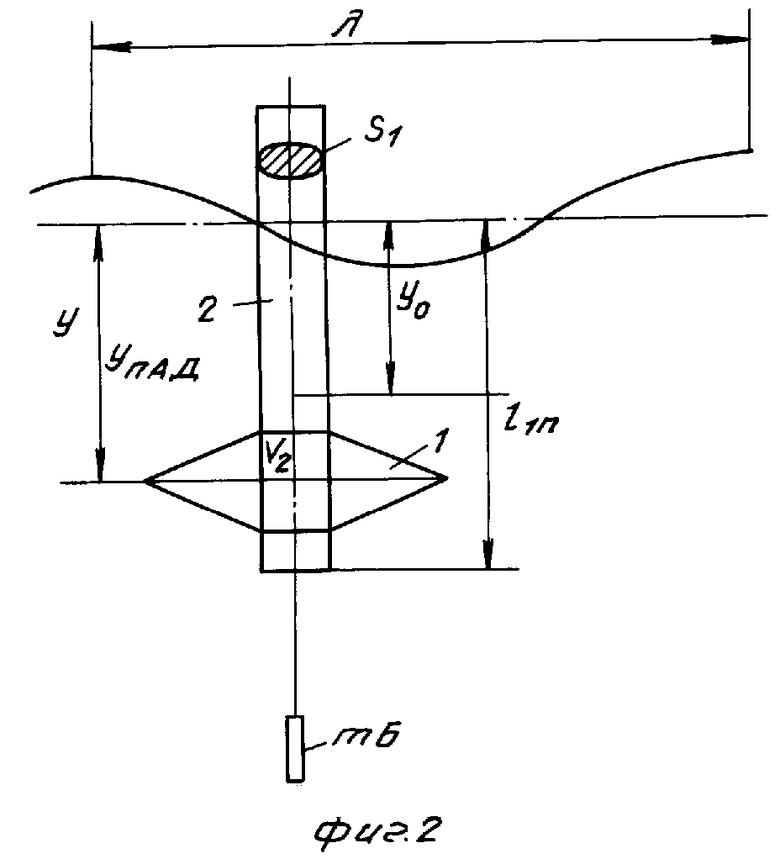
Полная структура возмущающего воздействия гармонической волны Yb= A ˙cos ωt на статически уравновешенный вертикально ориентированный цилиндр 1 с объемным пассивно-активным демпфером 2 (фиг. 2) имеет вид:
Fу≈  -
-  -
-
-  +
+  + (1)
+ (1)
+  -
-  -
-
-  , где V1 и V2 - объемы погруженной части вертикального цилиндра и объемного демпфера;
, где V1 и V2 - объемы погруженной части вертикального цилиндра и объемного демпфера;
S1 - площадь поперечного сечения цилиндра;
l1п и Yo - длина погруженной части вертикальной цилиндра и заглубление центра его плавучести;
YПАД - заглубление центра плавучести ПАД;
k = 2π/λ ; ω =  - волновое число и частота волны;
- волновое число и частота волны;
ε1(y0) = e , ε2(yПАД) = e
, ε2(yПАД) = e - коэффициенты ослабления амплитуды волны на горизонтах Yo и YПАД;
- коэффициенты ослабления амплитуды волны на горизонтах Yo и YПАД;
λ1= K1ρV1; λ2= K2ρV2 - присоединение массы цилиндра и демпфера; и
и  - безразмерные коэффициенты демпфирования цилиндра и демпфера, отнесенные к массам ρV1 и ρV2 и частоте волны ω;
- безразмерные коэффициенты демпфирования цилиндра и демпфера, отнесенные к массам ρV1 и ρV2 и частоте волны ω;
κ1иκ2- редукционные коэффициенты, определяемые соотношением размеров цилиндра и демпфера, и длиной волны.
Для вертикального цилиндра κ1= 1 -  , а для горизонтального радиуса r2κ2 = 1-
, а для горизонтального радиуса r2κ2 = 1- 
Структурное выражение (1) включает четыре составляющие: F1г.ст - гидростатическую силу, связанную с изменением заглубления вертикального цилиндра. Эта сила изменяется в фазе с волной и пропорциональна площади сечения s1; F1ив и F2ив - инерционно-волновые силы вместе с динамической частью сил давления, действующих на вертикальный цилиндр и объемный демпфер. Инерционно-волновые силы F1ив и F2ив пропорциональны массовому водоизмещению и присоединенным массам вертикального цилиндра и объемного демпфера, а также вертикальному ускорению частиц в волне на уровне Yo и YПАД. Эти силы опережают волну на π и действуют в противофазе в ней; F1п и F2п - силы присоса вертикального цилиндра и ПАД и поверхности, которые не зависят от времени. Эти силы с учетом ω2= gr пропорциональны квадрату угла волнового склона (2π/λ˙A˙ε1) на уровне Yo и YПАД и водоизмещениям V1 и V2. Обычно эти силы учитываются лишь при изучении движения подводных лодок вблизи свободной поверхности. В задачах воздействия волн на буи и платформы этими силами можно пренебречь. Их, однако, в общем случае легко и учесть или компенсировать приемом водяного балласта; силы демпфирующей природы F1д и F2д, выразающиеся через размерные коэффициенты демпфирования Vyi =  V1 и вертикальную скорость vy2= A ˙εi˙ω˙ sinω˙ t на горизонтах Yo и YПАД. Эти силы опережают волну на π /2.
V1 и вертикальную скорость vy2= A ˙εi˙ω˙ sinω˙ t на горизонтах Yo и YПАД. Эти силы опережают волну на π /2.
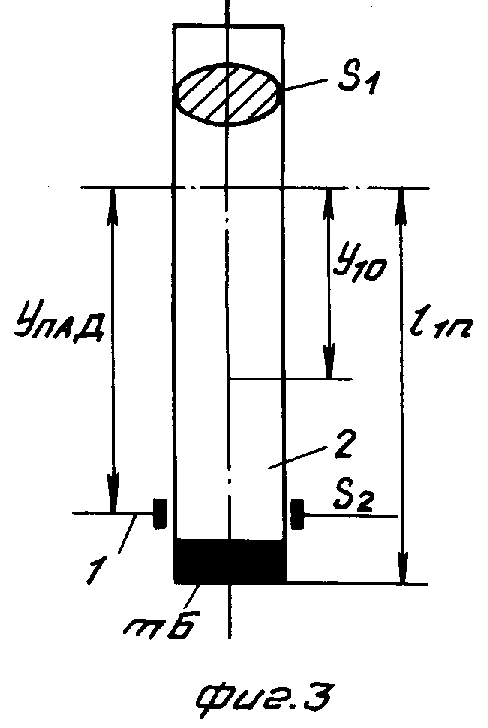
Для случая вертикального цилиндра с плоским ПАД (фиг. 3) структура возмущающего воздействия на нее волны имеет вид:
Fy ≈ gρS1Acosωt-Aε1(y0)ω2κ1(ρV1+λ1)cosωt-
- Aε2(yПАД)ω2κ2λ2cosωt+kA2ε
- Aε1(y0) V1sinωt-A2ε2(yПАД)ω2CyρSПАДsinωt
V1sinωt-A2ε2(yПАД)ω2CyρSПАДsinωt
В отличие от (1) в структуре (2) объем демпфера полагается равным нулю, поэтому объемных сил давления он не доставляет, однако плоский демпфер имеет присоединенную массу, и возникающая на нем инерционная сила разгружающе действует на F1г.ст. Коэффициент демпфирования плоского ПАД нормируется в этом случае на его площадь SПАД и ρ Vy2/2. Как и в случае (1), демпфирующие силы вертикального цилиндра и ПАД опережают волну по фазе на π /2. Силы присоса здесь создаются лишь на вертикальном цилиндре, и силы эти малы.
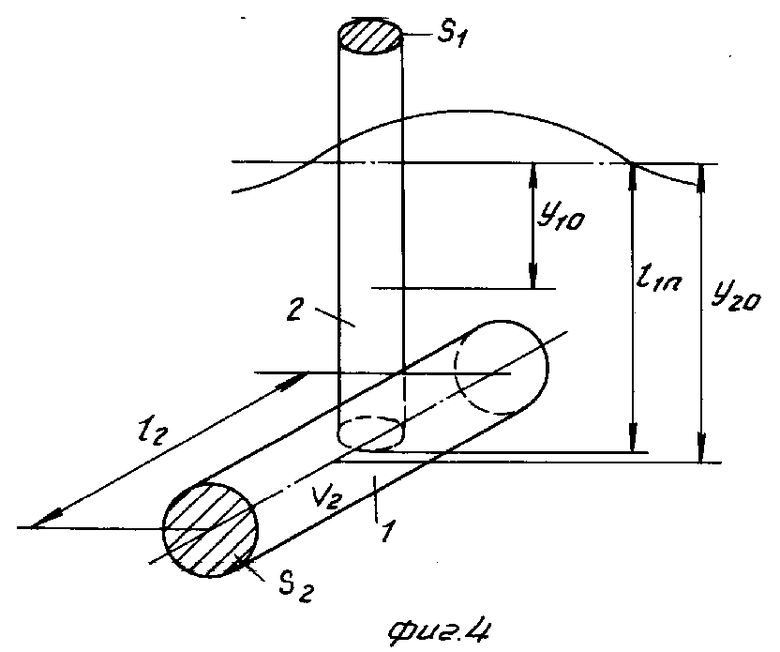
Рассмотрим также составную конструкцию (фиг. 4), состоящую из вертикальной колонны или стенки сечением S1, и горизонтального цилиндра сечением S2. Эта конструкция может являться расчетным составным элементом погружных буровых платформ, состоящих из множества вертикальных колонн и 2-3 горизонтальных цилиндров. Длина вертикальной колонны l1, длина элемента гоизонтального цилиндра l2, заглубление центров их плавучести Y10 и Y20 Стуктура возмущающего воздействия волн на эту составную конструкцию имеет вид:
Fy≈  -
- 
_  +
+  + (3)
+ (3)
+  -
-  →
→
 .
.
В отличие от структур (1) и (2) здесь роль ПАД выполняет горизонтальный цилиндр. На нем формируются инерционно-волновые силы F2ив, которые совместно с F1ив разгружают действие F1г.ст.
Как показывают эксперименты возмущающие силы демпфирующей природы малы по сравнению с гидростатическими и инерционно-волновыми, особенно для вертикального цилиндра. Что касается сил присоса, то в обоих случаях они могут быть компенсированы приемом дополнительного водного балласта и поэтому их из рассмотения можно исключить. Оставшиеся члены допускают явную минимизацию амплитуды суммарного воздействия волны на составную конструкцию путем выбоа соответствующего объема (площади), формы и заглубления ПАД.
Покажем на примерах, как на стадии проектирования и эксплуатации плавучих конструкций (фиг. 2, 3, 4) может быть миниминизировано возмущающее воздействие волн и существенно уменьшена их вертикальная качка.
П р и м е р 1 реализации данного изобретения для вехи и буя (фиг. 3). На стадии проектиования необходимо выполнить следующие операции: выбать для вехи или буя расчетный район и режим их функциониования. Для заданной интенсивности волнения выбрать наиболее веоятную длину волны πp и ее амплитуду Ар; назначить длину погруженной части вехи l1г ≥1,5 Ар и всей вехи l1≥(2,75-3) Ар из соображений, чтобы при волнении не погружалась в воду вся ее верхняя часть и не оголялся демпфер, который должен быть погружен на глубину YПАД ≈ 1,25 Ар от ватерлинии статического равновесия вехи при отсутствии волнения; из соображений обеспечения необходимой плавучести и полезного объема вехи в полупогруженном состоянии необходимо найти площадь s1 поперечного сечения вехи:
mo+mб+mд= ρ˙ (s1 l1п+Vб+Vд) (4),
где mо - полезная масса вехи вместе с приборами, механизмами, системами, корпусом;
mб и mд - масса балласта и демпфера;
Vб и Vд - объем балласта и демпфера.
Для решения уравнения (4) необходимо в первом приближении пренебречь Vб и Vд по сравнению с V1= s1 l1п, а затем уточнить значение s1.
4. Найти коэффициенты ослабления амплитуды на уровне центра плавучести вехи и демпфера. Если для численного примера взять λp= 80 м и Ар= 4 м, то lп= 6 м, Y10= 3 м, YПАД= 5, l1= 12 м. Для этих данных ε1(y10) = exp -  ·3 = 0.79; ε2(yПАД) = exp -
·3 = 0.79; ε2(yПАД) = exp -  ·5 = 0.675.
·5 = 0.675.
Здесь необходимо отметить принципиальное отличие ПАД от массивного демпфера вехи Фруда, который располагается на глубине 60-70 м. Для него ε = exp -  ·60 = 0.009 и, следовательно, волна на пассивный демпфер не воздействует. Он работает только на пассивное сопротивление в уравнении колебательного звена.
·60 = 0.009 и, следовательно, волна на пассивный демпфер не воздействует. Он работает только на пассивное сопротивление в уравнении колебательного звена.
5. Используя условия ω2 = g  и V1= s1 l1п и, считая, что силы присоса уравновешены приемом водяного балласта и главное воздействие на веху дают статические и инерционно-волновые компоненты, можно получить условия их взаимной компенсации:
и V1= s1 l1п и, считая, что силы присоса уравновешены приемом водяного балласта и главное воздействие на веху дают статические и инерционно-волновые компоненты, можно получить условия их взаимной компенсации:
F1г.ст + F1ub + F2ub = 0 или
S1-  · ε1(l1П·S1+λ1) -
· ε1(l1П·S1+λ1) -  · ε2·λПАД= 0.
· ε2·λПАД= 0.
Для вертикального цилиндра λ1 = = К1 ˙ρ˙V1 = K1 ˙ρ˙ l1п˙ s1, где:
K1 - коэффициент присоединенной массы, изменяющий на разных частотах в пределах 0,02-0,06. Для плоской пластины площадью λ= π˙ρ˙ S, где K ≈1. Поэтому λПАД≈ρ˙SПАД. Отсюда вытекает условие на площадь плоского пассивно-активного демпфера, нейтрализующего расчетное статическое воздействие волны на веху.
SПАД≈ S1ε - ε1(y10)l1п(1+K1)
- ε1(y10)l1п(1+K1) (5)
(5)
Для принятых выше численных данных Sпад ≈ 11,6 s1, и наружный радиус кольцевого демпфера К ≈3,54 r, где r - радиус самой вертикальной вехи. И если r = 0,20 м, то R ≈ 0,70 м размеры вполне технически реализуемые.
На основе выражений (5), указанных ранее условий выбора величины погруженной части вехи l1п≥1,5 Ар расчетной амплитуды волны и загрубления плоского ПАДа YПАД ≈ 1,25 Ар, а также средних значений коэффициентов присоединенной массы вертикального цилиндра К1 ≈ 0,04 и куглой пластины К ≈1, можно получить общее выражение для выбора площади плоского ПАДа. В соответствии со статистической теорией морских волн, каждой балльности соответствует свое математическое ожидание длины волны  , а высота волны h= 2 А при 3% обеспеченности составляет 0,06
, а высота волны h= 2 А при 3% обеспеченности составляет 0,06 , а при 1% обеспеченности - 0,1
, а при 1% обеспеченности - 0,1 (5). Отсюда ожидаемые амплитуды волн должны укладываться в диапазон
(5). Отсюда ожидаемые амплитуды волн должны укладываться в диапазон  = /0.03-0.05/
= /0.03-0.05/  . С учетом всего этого на основе (5) можно получить выражения для выбора SПАД для высот волн 1- и 3% -ной обеспеченности:
. С учетом всего этого на основе (5) можно получить выражения для выбора SПАД для высот волн 1- и 3% -ной обеспеченности:
S
 _ e
_ e ·1,5·0,05·1,04
·1,5·0,05·1,04
≈ S1·1,48 [0,159-0,0616] = 0,144S
[0,159-0,0616] = 0,144S
S
 _ e
_ e ·1,5·0,03·1,04
·1,5·0,03·1,04
≈ S1·1,26 [0,159-0,041] = 0,149·S
[0,159-0,041] = 0,149·S .
.
Таким образом, площадь плоского ПАДа для минимизации вертикальных возмущающих сил должна лежать в пределах:
SПАД ≈ (0,144-0,149) ˙s1˙λp , где s1 - площадь поперечного сечения вертикального цилиндра, а
λp - расчетна длина волны.
Для объемного ПАДа на основе (3) путем взаимной компенсации F1г.ст., F1ив и F2ив с учетом ω2 = g  , κ1≈κ2≈1 λ2= K2ρ˙V2 и λ1= К1˙ρ˙V= K1˙ρ˙s1˙l1п можно также получить условие выбора элементов ПАДа:
, κ1≈κ2≈1 λ2= K2ρ˙V2 и λ1= К1˙ρ˙V= K1˙ρ˙s1˙l1п можно также получить условие выбора элементов ПАДа: · S1 - e
· S1 - e S1·l1n(1+ K1) - e
S1·l1n(1+ K1) - e V2(1+ K2) = 0
V2(1+ K2) = 0
С учетом l1п= 1,5 А, y10= l1п/2, y20= 1,25 Ар и Ар= (0,03-0,05)˙λpполучаем условие выбора объемного ПАДа:
V2(1+K2)= (0,144-0,149) s1 ˙λ.
Величина К2 зависит от геометрической формы ПАД. Если это цилиндрическое кольцо наружным радиусом r2, внутренним r1, площадью π (r22-r12) и толщиной t, то К2≈ 1. В этом случае с учетом s1= π˙ r12, получим условие выбора:
r2 ≈ r
Следует иметь в виду, что ПАД работает двояко: и как пассивный демпфер, и как разгрузочный элемент. Поэтому уравнение вертикальной качки вехи или буя с ПАД при условии компенсации силы присоса на волне Yb= A˙ cos ω t имеет вид:
(ρ·V1+λВ+λБ+λПД+λПАД) +(NВ+NПД+NПАД)
+(NВ+NПД+NПАД) +gρ·S1·y =
+gρ·S1·y =
= A [gρ·S1-ε1(y10)ω2κ1(ρ·V1+λВ)-ε2(yПАД)·ω2·λПАД] ·cosωt - (6)
- Aω2[ε (y10) VВ+A·ε
VВ+A·ε
Для экспериментальной проверки предлагаемого технического решения было изготовлено 3 цилиндрических пенопластовых вехи длиной l= 40 см и радиусом r= 2 см. Эти вехи были уравновешены и отбалластированы для плавания в устойчивом вертикальном полупогруженном состоянии. В верхней своей части они имели легкие деревянные штоки с флажками для визуализации их вертикальной качки: веха 1 - с подвешенным снизу балластом и без демпфера, веха 2 - с подвешенным снизу балластом и глубоко расположенным демпфером (модель вехи Фруда) диаметром 24 см, веха 3 - с пассивно-активным демпфером диаметром 12 см; расположенным в области активного воздействия волн. (его площадь определена для лабораторной волны длиной λ = 1,6 м).
Был запущен волнопродуктор и установлено, что веха 1 имеет очень интенсивную вертикальную качку, веха 2 хорошо самостабилизиуется на волнении, но веха 3 со значительно меньшей площадью демпфера, поднятого под поверхность на глубину 15 см, стабилизируется еще лучше. Этот опыт свидетельствует, что теория принципиально верна.
П р и м е р 2. Реализация принципа динамической компенсации при стабилизации плавучих платформ, состоящих из вертикальных и горизонтальных цилиндров. Расчетный элемет таких платформ показан на фиг. 4.
Будем считать, что длина погруженной части вертикального цилиндра l1, а площадь поперечного сечения - s1, длина горизонтального цилиндра l2, а площадь сечения s2. Учтем, что V1= s1˙ l1; V2= s2˙ l2, λ1= К1˙ρ˙s1˙l1˙λ2= К2˙ρ˙s2˙l2, где К1 и К2 - коэффициенты, присоединенных масс цилиндров, а также то, что ω2g  . Пренебрежем силами присоса или компенсируем их приемом водяного балласта. В этом случае уравнение (3) для суммарной силы принимает вид:
. Пренебрежем силами присоса или компенсируем их приемом водяного балласта. В этом случае уравнение (3) для суммарной силы принимает вид:
FyΣ ≈ gρS1Acosωt-g  S1l1(1+K1)Aε1(y10)cosωt-
S1l1(1+K1)Aε1(y10)cosωt-
- g  S2l2(1-K2)Aε2(y20)cosωt - g
S2l2(1-K2)Aε2(y20)cosωt - g  S1l1× (7)
S1l1× (7)
× Aε1(y10)sinωt-g  S2l2Aε2(y20)sinωt.
S2l2Aε2(y20)sinωt.
Если вынести в (7) общий множитель g  AS1l1 за скобку и сгруппировать подобные члены, получим следующее условие для возмущающей силы от волны на составную конструкцию.
AS1l1 за скобку и сгруппировать подобные члены, получим следующее условие для возмущающей силы от волны на составную конструкцию.
FyΣ ≈ g S1l
S1l - (1+K1)ε1(y10)κ1-
- (1+K1)ε1(y10)κ1-
- (1+K2) (y
(y cosωt-
cosωt- (y10ε1(y10)κ1- (8)
(y10ε1(y10)κ1- (8)
-  (y
(y sinωt
sinωt .
.
Выражение это подлежит минимизации, т. к. главным членом в нем является значение квадратной скобки перед cosωt, а внутри скобки есть члены, вычитающие друг из друга. Задача этой минимизации должна решаться вначале на стадии проектирования платформ для расчетного волнения, а затем на стадии их эксплуатации, при отличии реального волнения от расчетного. Покажем, как она может решаться на стадии проектирования. Выберем в качестве расчетных параметров волнения длину волны λp= 100 м и амплитуду АР= 5 м.
В этом случае необходимо найти необходимую величину заглубления вертикальной колонны l1≥1,25 А, чтобы не оголялся горизонтальный цилиндр. Пусть l1= 6,5 м и длина всей колонны 13 м. Исходя из полезной нагрузки платформы, приходящейся на один расчетный элемент (все необходимые массы без водяного балласта) и обеспечения условий плавучести, определяются минимально необходимые диаметр вертикальной колонны s1, площадь s2 и длина l2 горизонтальной колонны:
ρ˙s1˙l1+ρ˙s2˙l2= m.
Пусть, к примеру, диаметр вертикальной колонны d1= 2 м и s1= 3,14 м2. Тогда выражение (10) определит минимально необходимые по плавучести s2˙ l2= m1/ρ -s1l1, а по конструктивным соображениям могут быть выбраны s2или l2, удовлетворяющие этому условию. Это необходимое условие, и все решения по оптимизации силового воздействия должны решаться при больших s2l2. Задача в дальнейшем должна решаться методами вариаций и последовательных приближений.
3. По конструктивным соображениям определим длину расчетного горизонтального цилиндра l2 (чаще всего общая длина платформы определяется ограничением габаритных размеров и количеством вертикальных колонн, которые выбираются из других соображений). Тогда можно найти в первом приближении s2= (m1/ρ -s1l1) : l2, а от s2 перейти к минимальному диаметру do2. Принимаемое значение должно быть больше do2. Пусть для примера мы выбрали в первом приближении d12= 3 м и тогда s2= 7,07 м2.
4. Необходимы коэффициенты ослабления амплитуды на уровне
y10=  l1 и y20= l1+
l1 и y20= l1+  ; ε1= exp -
; ε1= exp -  ·3,25= 0,815
·3,25= 0,815
ε2= exp -  (6,5+1,5)= 0,605. (9)
(6,5+1,5)= 0,605. (9)
5. Необходимы редукционные коэффициенты для вертикального цилиндра κ1= 1-  = 0,994 и горизонтального цилиндра κ2= 1-
= 0,994 и горизонтального цилиндра κ2= 1-  ≈ 1,0. Они оказались близкими к единице.
≈ 1,0. Они оказались близкими к единице.
6. Пренебрегая в первом приближении влиянием демпфирующих составляющих как членов второго порядка малости по сравнению с силами давления и инерционно-волновыми, записываем условием равенства нулю члена перед cosω t.
Примем для первого приближения значение коэффициентов присоединенных масс для вертикального цилинда К1= 0,04 для горизонтального К2= 0,8. Тогда (10) может быть разрешено относительно длины l2.
Получим на основании (10) и ранее сформулированных рекомендации по длине вертикальной колонны l1= 1,25 А= 1,24 (0,03-0,05) /  и коэффициентов присоединенных масс общее выражение для стабилизирующего горизонтального цилиндра. Будем считать κ1≈κ2≈1, среднее значение К1≈ 0,04, К2 ≈ 0,8, а положение центра плавучести вертикальной колонны посередине ее высоты, т. е. Y10= 1/2; l1= 0,625 (0,03-0,05)
и коэффициентов присоединенных масс общее выражение для стабилизирующего горизонтального цилиндра. Будем считать κ1≈κ2≈1, среднее значение К1≈ 0,04, К2 ≈ 0,8, а положение центра плавучести вертикальной колонны посередине ее высоты, т. е. Y10= 1/2; l1= 0,625 (0,03-0,05)  , а горизонтального цилиндра на глубине Y20= l1+r2= 1-25 (0,03-0,05)
, а горизонтального цилиндра на глубине Y20= l1+r2= 1-25 (0,03-0,05)  +r2. В этом случае можно записать для 3 и 1% -ной обеспеченности следующие условия выбора оптимальных соотношений в первом приближении:
+r2. В этом случае можно записать для 3 и 1% -ной обеспеченности следующие условия выбора оптимальных соотношений в первом приближении:



× e S2l2
S2l2



 (10)
(10)
× S2l2
Из этих выражений можно получить условия на выбор длины горизонтального цилиндра и его радиуса, обеспечивающие минимальные вертикальное воздействие морских вол на составную конструкцию:
r = /0,256÷0,266/S1λр.
= /0,256÷0,266/S1λр.
На основе этого выражения для расчетной длины волны и назначенного из других соображений s1 может осуществляться выбор оптимального сочетания r2 и l2. Если, например, задан радиус r2, то может быть вычислена оптимальная длина l2 или наоборот. 7. Далее необходимо уточнить полученные значения. Поскольку коэффициенты присоединенных масс К1 и К2 и демпфирования  и
и  зависят (хотя и не очень сильно) от чисел Рейнольдса: Re= Aω˙ε1˙d1˙ν-1 и Re= Aω˙ε1˙d1˙ν-1 и безразмерных частот
зависят (хотя и не очень сильно) от чисел Рейнольдса: Re= Aω˙ε1˙d1˙ν-1 и Re= Aω˙ε1˙d1˙ν-1 и безразмерных частот  = ω(l1g-1)0,5 и σ2 = ω(d2·g-1)0,5 =
= ω(l1g-1)0,5 и σ2 = ω(d2·g-1)0,5 =  то необходимо найти Rei и σi и после этого вычислить значения k1, k2,
то необходимо найти Rei и σi и после этого вычислить значения k1, k2,  и
и  для вертикального и горизонтального цилиндров. Для конкретно принятых выше размеров имеем:
для вертикального и горизонтального цилиндров. Для конкретно принятых выше размеров имеем:
Re= 14,8 ˙106; Re2= 5,41˙ 106; σ1= 0.64; σ2= 0.60.
На основании проведенных нами исследований установлено, что для вертикального цилиндра K ≈  /-14.5+11
/-14.5+11 /;
/;  ≈ 1.23-1.9δ а для горизонтального К≈ Rе: (-658+1,5 Re); r ≈
≈ 1.23-1.9δ а для горизонтального К≈ Rе: (-658+1,5 Re); r ≈  : /0.28+3.69/.
: /0.28+3.69/.
8. Составим теперь из (8) условие минимизации силового воздействия волны на составную конструкцию с учетом демпфирующих членов.
min  - (1+K1)ε1(y10)κ1-(1+K2)ε2(y20)
- (1+K1)ε1(y10)κ1-(1+K2)ε2(y20) cosωt-
cosωt-
-  0,815+r2y0,605
0,815+r2y0,605 sinωt
sinωt . (11)
. (11)
Искомым параметром при выбранном диаметре d2 является l2. При учете синусной и косинусной составляющей нужно минимизировать функцию:
Φ =  - (1+K1)ε1(y10)κ1- (1+K2)ε2(y20)×
- (1+K1)ε1(y10)κ1- (1+K2)ε2(y20)×
×  +
+  (y10)+
(y10)+ (y20)
(y20) . (12)
. (12)
Ее минимуму соответствует значение s2l2, определяемое равенством:
S2l2= { [ - (1+K1)ε1(y10)κ1] [(1+K2)ε2(y20)κ2(S1l1)-1] -
- (1+K1)ε1(y10)κ1] [(1+K2)ε2(y20)κ2(S1l1)-1] -
- r (y
(y (y20)κ2} : { [(1+K2)ε2(y20)κ2(S1l1)-1]2+ (13)
(y20)κ2} : { [(1+K2)ε2(y20)κ2(S1l1)-1]2+ (13)
+ [ (y20)κ2(S1l1)-1] 2} .
(y20)κ2(S1l1)-1] 2} .
Получаемое из (14) оптимальное значение s2l2 дает возможность уточнить длину l2 или диаметр d2.
Таким образом, данный принцип создания плавучих оснований может иметь весьма широкое применение для самых различных плавучих морских конструкций.
Рассмотренные примеры относились к вопросам принятия архитектурных решений на стадии проектирования плавучих оснований. Они позволяют выбрать форму и оптимальные соотношения размеров для расчетной волны. В качестве расчетной волны обычно выбирается наиболее опасная волна заданной балльности и обеспеченности. Однако волнение - процесс случайный. И в данное конкретное время и месте постановки морского сооружения (например волномерной вехи) наиболее вероятные характеристики волнения могут существенно отличаться от расчетных. На таком волнении расчетные элементы ПАДа недостаточно эффективно компенсируют статические компоненты волнового воздействия. Однако и в случае уже выбранного ПАДа остается возможность минимизировать возмущающее воздействие волны за счет изменения его перемещения вдоль вертикальной колонны или изменения осадки всего сооружения так, чтобы для наиболее вероятных, измеренных во время эксплуатации характеристик волнения выполнялись условия (4), (5).
Покажем на примере волномерной вехи, как технически может реализовываться эта возможность. При изменении частоты (длины) волна при уже выбранной расчетной площади SПАД и заглублении YоПАД изменением осадки вехи (и одновременно заглубления ПАДа) можно добиться выполнения условия (5). В этом случае величина изменения осадки вехи ΔY должна быть определена из решения трансцендентного уравнения:
S1- (l1+Δy)S1(1+K1) e
e
 SПАДe
SПАДe , (14)
, (14)
где λ1 - новая длина волны;
Yo и YоПАД - исходные углубления центров плавучести вехи и ПАД.
Если увеличивается частота волны (уменьшается ее длина), то инерционно-волновое воздействие растет, и для нейтрализации гидростатической составляющей веха с демпфером должна погружаться глубже, чтобы ослабить инерционно-волновые силы. Если длины волны увеличиваются, веха должна всплыть.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧИЙ ПРЕДОСТЕРЕГАТЕЛЬНЫЙ ЗНАК ПОВЫШЕННОЙ ВОЛНОСТОЙКОСТИ | 1999 |
|
RU2190554C2 |
| ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА ПОВЫШЕННОЙ ВОЛНОСТОЙКОСТИ | 2001 |
|
RU2191132C1 |
| СУДОПОДЪЕМНЫЙ ПОНТОН | 1994 |
|
RU2123958C1 |
| ПЛАВ ДЛЯ ОСНАСТКИ ОРУДИЙ ЛОВА | 1994 |
|
RU2057442C1 |
| БОЛЬШОЙ МОРСКОЙ БУЙ ЗАДАННОЙ ВОЛНОСТОЙКОСТИ И ОСТОЙЧИВОСТИ | 2006 |
|
RU2309081C1 |
| ПЛАВУЧИЙ ПРЕДОСТЕРЕГАТЕЛЬНЫЙ ЗНАК ЗАДАННОЙ ВОЛНОСТОЙКОСТИ И ОСТОЙЧИВОСТИ | 2006 |
|
RU2324619C2 |
| СПОСОБ БИООЧИСТКИ ВОД ОТ ТЕХНОГЕННЫХ РАДИОНУКЛИДОВ | 2002 |
|
RU2255906C2 |
| ПОЛУПОГРУЖНОЕ ОСНОВАНИЕ МОРСКОГО СООРУЖЕНИЯ | 1992 |
|
RU2034738C1 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| АВАРИЙНО-СИГНАЛЬНЫЙ РАДИОБУЙ ПОДВОДНОЙ ЛОДКИ | 2005 |
|
RU2287450C1 |
Использование: в конструкции полупогруженных оснований свободно дрейфующих и заякоренных буев, океанологических платформ, полупогруженных буровых установок, как свободно плавающих, так и опирающихся на дно. Сущность изобретния: в плавучих основаниях, содержащих вертикально ориентированные полупогруженные водоизмещающие колонны 1, вблизи свободной поверхности в области активного действия волн на глубине 1,25 расчетной амплитуды волны устанавливается плоский или объемный пассивно-активный демпфер (ПАД) 2 в виде пластины кругового вертикального цилиндра или горизонтального цилиндра, уменьшающего самовозмущающее действие волн на плавучее основание. Форма, геометрические размеры ПАДов для расчетной частоты и амплитуды волны получаются из условий минимизации суммарного возмущающего воздействия волн на колонну и ПАД сил статической и гидродинамической волновой природы, определяемых на основе полной структуры самих возмущающих сил. Плавучее основание содержит также устройство минимизации возмущающего воздействия волн на нерасчетном волнении, включающее в себя измеритель 3 параметров набегающих волн, блок 4 их обработки и получения наиболее вероятной длины и амплитуды, измеритель 5 заглубления полупогруженного основания, источник 6 электроэнергии, блок 7 оптимизации, балластную цистерну 8 и блок 9 автоматической балластировки. 4 з. п. ф-лы, 4 ил.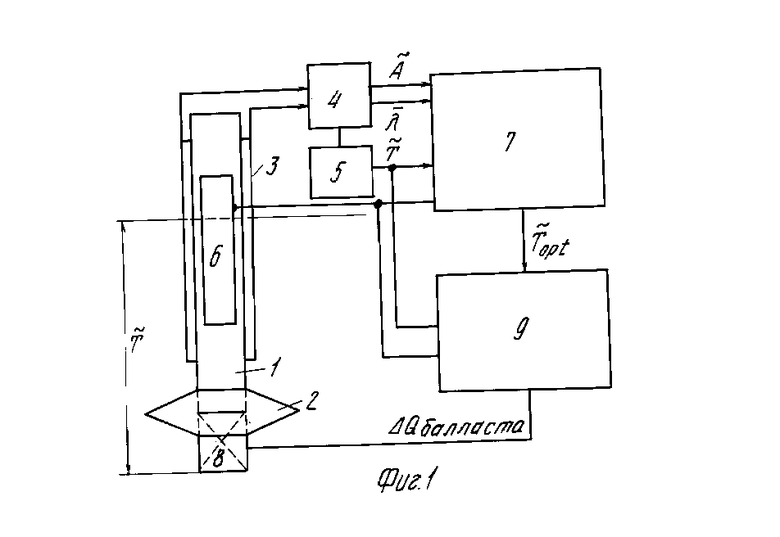
Sпад ≈ (0,137-0,147)˙S1˙λp ,
где S1 - площадь поперечного сечения колонны, определяемая из условия плавучести всей конструкции,
λp - расчетная длина волны.
Vпад ≈ (0,148-0,151)˙(1+K22)-1˙S1˙λp , где K22 ≈ 0,7 - 0,9 коэффициент присоединенной массы объемного ПАДа, зависящий от формы и соотношения разности наружного и внутреннего диаметра и его высоты.
r

 = /0.256÷0.266/S1λр.
= /0.256÷0.266/S1λр.

