Изобретение относится к гидромеханизации земляных работ, в частности к устройствам управления землесосными снарядами.
Известно устройство для управления земснарядом с механическим разрыхлителем [1] .
Устройство включает датчик токовой нагрузки, расходомер, задатчик, сумматор, блок ограничений, датчик скорости поворота земснаряда и командный блок.
Недостатком данного устройства является низкая производительность земснаряда в связи с вынужденными остановками и невозможностью обеспечения плавной работы в оптимальном режиме для конкретных технологических условий работы земснаряда.
Наиболее близким по технической сущности является регулятор управления режимом работы землесосного снаряда [2] . Он содержит датчики токовой нагрузки электродвигателя механического рыхлителя, вакуума, расхода пульпы и консистенции пульпы, формирователи сигнала, задатчики зоны нечувствительности блока масштабного регулирования, блок задержки, инвертор, задатчики отсечки, блок выделения преобладающего сигнала, формирователь-усилитель, блок аварийной сигнализации, блок индикации.
Регулятор управления за счет изменения скорости папильонирования выдерживает оптимальный режим гидротранспорта грунта для конкретных условий работы (дальности и высоты гидротранспорта, плотность грунта и др. ). Учет четырех параметров позволяет использовать регулятор в различных грунтовых и технологических условиях. Регулирование скорости папильонирования ведется плавно по заданной передаточной характеристике в пределах и масштабах заданных установками зоны нечувствительности и отсечки.
Недостатком данного регулятора является ненадежность работы устройства, заключающаяся в отсутствии обратной связи исполнительного механизма с системой управления, которая поддерживает оптимальный режим без учета нагрузки на папильонажные тросы. При работе земснаряда у бровки прорези, при больших углах заложения якорей и на грунтах разной плотности регулятор будет задавать достаточную для поддержания высокой консистенции скорость папильонирования, что вызовет перегрузку папильонажной системы.
Целью изобретения является повышение надежности работы устройства путем предотвращения критических режимов работы папильонажной системы при резании грунта на бровках прорези.
Цель достигается тем, что регулятор управления режимом работы землесосного снаряда, в который входит исполнительный механизм, блок аварийной сигнализации, датчики токовой нагрузки, вакуума, расхода пульпы и консистенции пульпы, подключенные к первым входам соответствующих формирователей, к которым подключены датчики вакуума и консистенции пульпы, подключены к первым входам соответствующих блоков масштабного регулирования непосредственно, а тех формирователей, которые соединены с датчиками токов нагрузки и расхода пульпы, соответственно через блок задержки и инвертор, выходы блоков масштабного регулирования подключены к соответствующим входам выделения преобладающего сигнала, выход которого подключен к блоку аварийной сигнализации, при этом первые выходы четырех задатчиков зоны нечувствительности подключены к вторым входам соответствующих формирователей, а вторые выходы - к вторым входам блоков масштабного регулирования, к третьим входам каждого из которых подключены соответствующие задатчики отсечки, снабжен блоком управления папильонирования, двумя датчиками тока двигателей папильонажных лебедок и датчиком поворота земснаряда, при этом выход блока выделения преобладающего сигнала подключен к первому входу блока управляющего воздействия, выход которого подключен к входу управления папильонирования, выход которого подключен к первым входам датчиков тока двигателей папильонажных лебедок, первые выходы которых подключены к первому и второму входам исполнительного механизма, а вторые объединены и подключены к входу блока управляющего воздействия, к третьему входу которого подключен датчик поворота земснаряда, при этом блок управляющего воздействия включает функциональный усилитель, компаратор и умножитель, вход которого является третьим входом блока управляющего воздействия, выход умножителя подключен к первому входу компаратора, второй вход которого является вторым входом блока управляющего воздействия, выход компаратора подключен к первому входу функционального усилителя, второй вход которого является первым входом, а выход - выходом блока управляющего воздействия.
На фиг. 1 изображен предлагаемый регулятор.
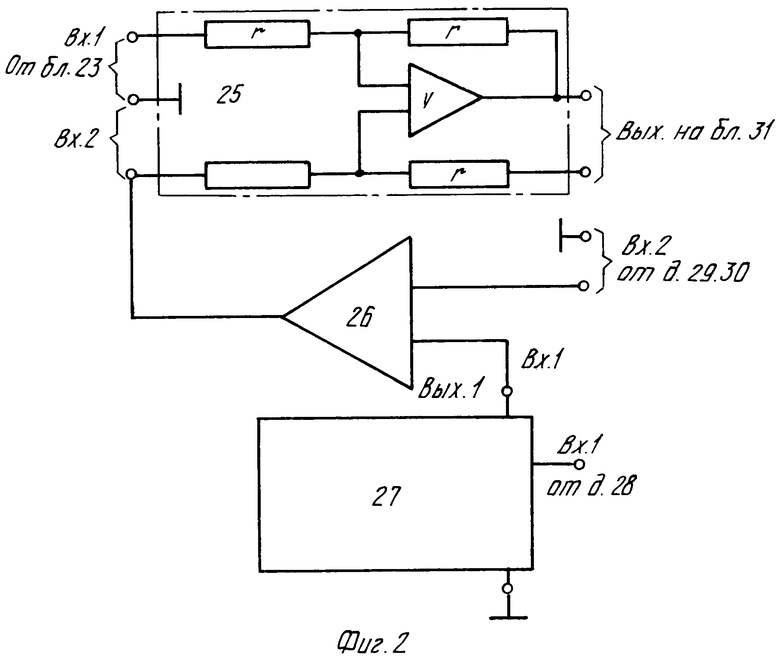
Регулятор управления режимом работы землесосным снарядом содержит датчик 1 токовой нагрузки, датчик 2 вакуума, датчик 3 расхода пульпы, датчик 4 консистенции пульпы, при этом каждый датчик соединен соответственно с формирователями 5-8, вторые входы которых соединены с первыми выходами задатчиков 9-12 зоны нечувствительности, вторые выходы которых соответственно соединены с первыми входами блоков 13-16 масштабного регулирования. Канал датчика 1 токовой нагрузки снабжен блоком 17 задержки, вход которого соединен с выходом первого формирователя 5, а выход - с блоком 13 масштабного регулирования. Канал датчика 3 расхода пульпы снабжен инвертором 18. Блоки 13-16 масштабного регулирования соединены с задатчиками 19-22 отсечки. Регулятор содержит блок 23 выделения преобладающего сигнала, соединенный с блоком 24 управляющего воздействия, состоящий из функционального усилителя 25 (фиг. 2) по схеме вычитания, компаратора 26 и умножителя 27. Первый вход функционального усилителя 25 соединен с выходом блока 23 выделения преобладающего сигнала, второй его вход соединен с выходом компаратора 26, первый вход которого соединен с выходом умножителя 27, соединенный с датчиком 28 поворота земснаряда, а второй вход соединен с датчиками 29 и 30 тока электродвигателей папильонажных лебедок. Выход блока 24 управляющего воздействия соединен с блоком 31 управления папильонированием, который через датчики 29 и 30 тока электродвигателей папильонажных лебедок соединены с исполнительными механизмами 32 и 33. Блок 31 управления папильонированием выполнен в виде многополостного тумблера переключения. Кроме того, регулятор содержит блок 34 аварийной сигнализации и блок 35 индикации, выходы которых связаны с исполнительными механизмами 32 и 33.
Регулятор работает следующим образом.
Выходные сигналы датчиков токовой нагрузки 1, вакуума 2, расхода пульпы 3, консистенции пульпы 4 поступают соответственно на первые входы формирователей 5-8, на вторые входы которых одновременно подаются соответственно сигналы с задатчиков 9-12 зоны нечувствительности. Формирователи 5-8 формируют по каждому каналу сигнал, который соответствует передаточной характеристике или моменту начала и конца регулирования в пределах, предварительно заданных соответствующим задатчиком 9-12 зоны нечувствительности и задатчиками 19-22 отсечки.
Сигнал от блока 23 выделения преобладающего сигнала подается на блок 24 управляющего воздействия и от него на блок 31 управления папильонированием. Задается режим работы тиристорного преобразователя одного из электродвигателей папильонажных лебедок. Датчики 29 и 30 тока электродвигателей папильонажных лебедок выдают сигнал на второй вход компаратора 26, где сигнал сравнивается с сигналом критического значения скорости, поступающим на первый вход компаратора 26 от умножителя 27.
Нагрузка на систему папильонирования зависит от угла поворота земснаряда относительно оси прорези, поэтому умножитель 27 вносит поправку в значение критической скорости в зависимости от угла поворота. При совпадении сигналов от умножителя 27 и датчиков 29 и 30 тока электродвигателей папильонажных лебедок компаратор 26 открывается и сигнал поступает на второй вход функционального усилителя 25 и происходит снижение управляющего сигнала, скорость папильонирования снижается.
По сравнению с прототипом предлагаемый регулятор позволяет повысить надежность работы устройства за счет предотвращения критических режимов работы папильонажной системы. Блок управляющего воздействия позволяет снизить скорость у бровки прорези на плотных грунтах при возникновении перегрузки папильонажной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор управления режимом работы землесосного снаряда | 1986 |
|
SU1451223A1 |
| УСТРОЙСТВО ДЛЯ БЕЗЪЯКОРНОГО ПАПИЛЬОНИРОВАНИЯ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011757C1 |
| РОТОРНО-КОВШОВОЕ ГРУНТОЗАБОРНОЕ УСТРОЙСТВО ЗЕМЛЕСОСНОГО СНАРЯДА | 1990 |
|
RU2011754C1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ В ЗАБОЕ ПЛАВУЧЕГО ЗЕМСНАРЯДА | 1968 |
|
SU232144A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЗЕМЛЕСОСНЫМ СНАРЯДОМ | 1967 |
|
SU199007A1 |
| СПОСОБ НАМЫВА ОДНОРОДНЫХ ОСНОВАНИЙ ИЗ НЕОДНОРОДНЫХ КАРЬЕРНЫХ ГРУНТОВ | 1991 |
|
RU2010086C1 |
| Кондуктометрический консистомер | 1990 |
|
SU1742424A1 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО ЗЕМЛЕСОСНОГО СНАРЯДА | 1990 |
|
RU2030514C1 |
| СПОСОБ ВОЗВЕДЕНИЯ СООРУЖЕНИЯ ИЗ ТОНКОСТЕННЫХ СТАЛЬНЫХ ОБОЛОЧЕК НА СЛАБЫХ ГРУНТАХ АКВАТОРИИ | 1990 |
|
RU2032788C1 |
| Ковшовое грунтозаборное устройство земснаряда | 1990 |
|
SU1804528A3 |

Регулятор управления режимом работы землесосного снаряда содержит датчик токовой нагрузки, датчик вакуума, датчик расхода пульпы, датчик консистенции пульпы, формирователи, задатчики зоны нечувствительности, блоки масштабного регулирования, блок задержки, инвертор, задатчики отсечки, блок выделения преобладающего сигнала, блок управляющего воздействия, функциональный усилитель по схеме вычитания, компаратор, умножитель, датчик поворота земснаряда, датчики тока электродвигателей папильонажных лебедок, блок управления папильонированием, исполнительные механизмы. 1 з. п. ф-лы, 2 ил.
РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА, включающий исполнительный механизм, блок аварийной сигнализации, датчики токовой нагрузки, вакуума, расхода пульпы и консистенции пульпы, подключенные к первым входам соответствующих формирователей, к которым подключены датчики вакуума и консистенции пульпы, подключенные к первым входам соответствующих блоков масштабного регулирования, непосредственно, а тех формирователей, которые соединены с датчиками токовой нагрузки и расхода, - соответственно через блок задержки и инвертор, выходы блоков масштабного регулирования подключены к соответствующим входам блока выделения преобладающего сигнала, выход которого подключен к блоку аварийной сигнализации, при этом первые выходы четырех задатчиков зоны нечувствительности подключены к вторым входам соответствующих формирователей, а вторые выходы - к вторым входам блоков масштабного регулирования, к третьим входам каждого из которых подключены соответствующие задатчики отсечки, отличающийся тем, что, с целью повышения надежности в работе путем предотвращения критических режимов работы папильонажной системы, он снабжен блоком управляющих воздействий, блоком управления папильонирования, двумя датчиками тока двигателей папильонажных лебедок и датчиком поворота земснаряда, при этом выход блока выделения преобладающего сигнала подключен к первому входу блока управляющего воздействия, выход которого подключен к входу блока управления папильонирования, выход которого подключен к первым входам датчиков тока двигателей папильонажных лебедок, первые выходы которых подключены к первому и второму входам исполнительного механизма, а вторые объединены и подключены к второму входу блока управляющего воздействия, к третьему входу которого подключен датчик поворота земснаряда, при этом блок управляющего воздействия включает функциональный усилитель, компаратор и умножитель, вход которого является третьим входом блока управляющего воздействия, выход умножителя подключен к первому входу компаратора, второй вход которого является вторым входом блока управляющего воздействия, выход компаратора подключен к первому входу функционального усилителя, второй вход которого является первым входом, а выход - выходом блока управляющего воздействия.
