Изобретение относится к устройствам управления землесосными снарядами с механическим рыхлителем и может быть использовано для гидромеханизированного перемещения грунта.
Цель изобретения - повышение производительности работы земснаряда путем автоматического обеспечения работы на эффективном режиме при равномерной подаче грунта в грунтоприемник.
за вычетом падения напряжения на база- эмиттерном переходе. Использование база- эмиттерных переходов транзисторов в качестве элементов, образующих диодное ИЛИ дает возможность сформировать по коллекторным цепям этих транзисторов дискретный сигнал для индикации канала, по которому iB данный момент идет регулирование.
Сигнал с выхода g поступает на форНа фиг. 1 представлена блок-схема пред-10 мирователь 24 выходного сигнала, задаюлагаемого регулятора; на фиг. 2 - схе-щего необходимую частоту вращения привома блока задержки; на фиг. 3 - схе-да папильонажной лебедки, перемещающей
ма блока выделения преобладающего сигна-земснаряд по забою.
ла; на фиг. 4 - схема блока масштаб-Конструктивное выполнение блоков 13-
ного регулирования.16 представлено на фиг. 4. Задающими
Регулятор управления режимом работы землесосного снаряда содержит датчик 1 токовой нагрузки, датчик 2 вакуума, датчик 3 расхода пульпы, датчик 4 консистенции пульпы, при этом каждый датчик соединен соответственно с первым - четвертым 20 формирователями 5-8, вторые входы которых соединены с первым выходом первого - четвертого задатчиков 9-12 зоны нечувствительности, вторые выходы которых соответственно соединены с первыми входами первого - четвертого блоков 13-16 масштабного регулирования. Канал датчика 1 токовой нагрузки снабжен блоком 17 задержки, вход которого соединен с выходом первого формирователя 5, а выход -
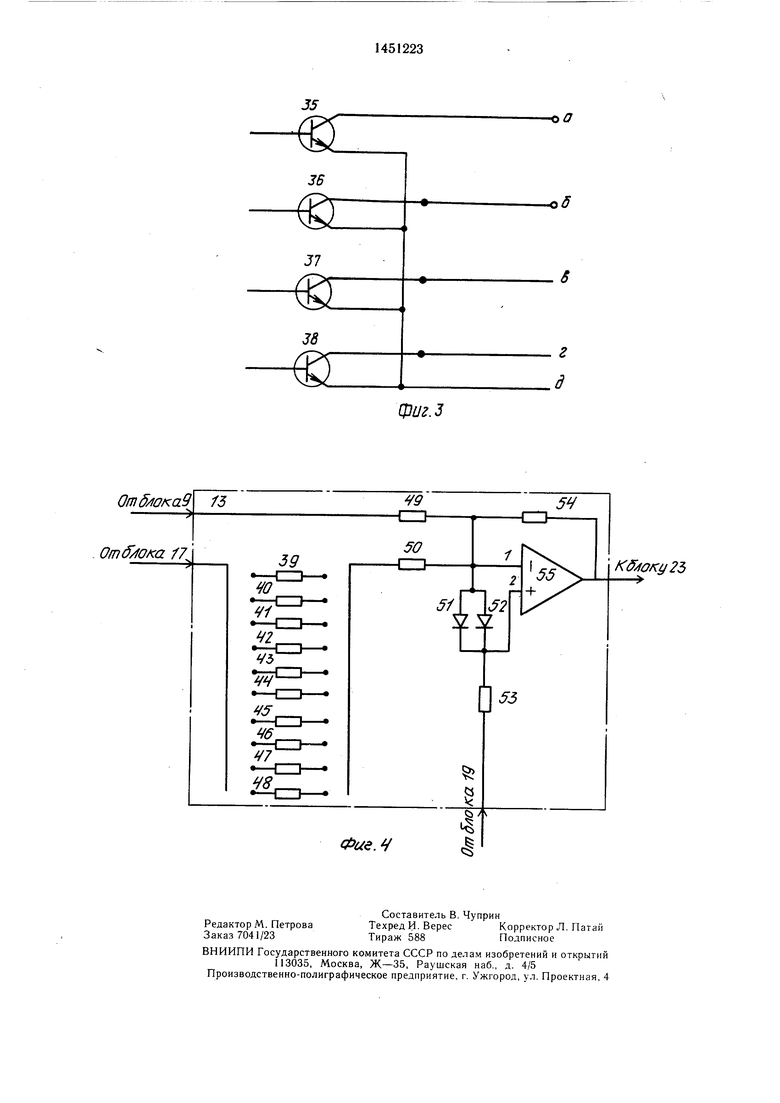
элементами масштабного регулирования являются задатчики 9-12 зоны нечувствительности и задатчики 19-22 отсечки, с которых сигналы поступают на блоки 13- 16 масштабного регулирования.
Блок 13 масштабного регулирования выполнен в виде набора резисторов 39- 48, коммутируемых переключателями резисторов 49 и 50, диодов 51 н 52, а также резисторов 53 и 54 и усилителя 55.
На вход «1 усилителя 55 поступает входной сигнал через цепочку резисторов 39-48, на вход «2 сигнал поступает через резистор 53.
Увеличение входных сигналов ведет к соответствующему увеличению напряжения
с блоком 13 масштабного регулирования. .,,, на выходе усилителя 55, что пропорцио- Канал датчика 3 расхода пульпы снабженнально снижает выходной ток.
инвертором 18. Блоки 13-16 масштабно-При достижении одним из входных того регулирования соединены с первым-чет-ковых сигналов значения, соответствующего
вертым задатчиками 19-22 отсечки. Кро-заданному установкой переключателя задатме того, регулятор содержит блок 23 чика 19 отсечки данного канала, выход- выделения преобладающего сигнала, соеди- ,г ное напряжение канала достигает опорного, неный с формирователем-усилителем 24,при этом выходной ток регулятора станоблок 25 аварийной сигнализации, испол-вится равным нулю, что соответствует
нительный механизм 26 земснаряда 27 и блок остановке привода.
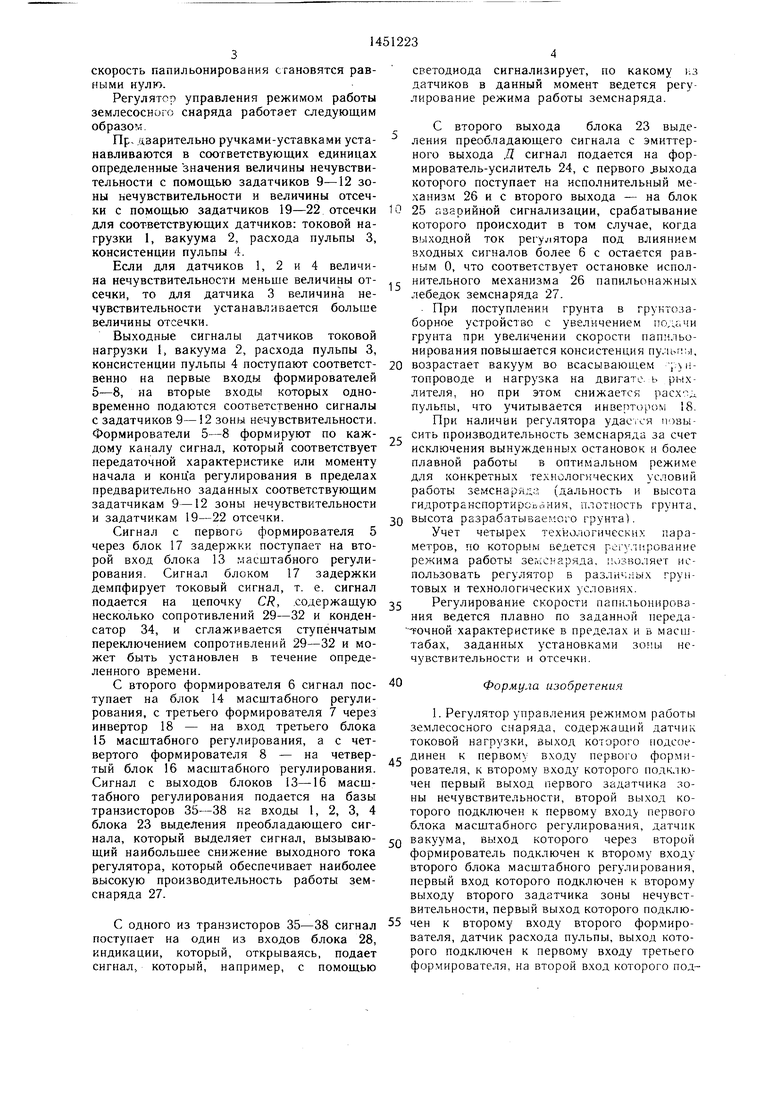
28 индикации.При установке переключателя задатчиБлок 17 задержки (фиг. 2) содержит пятька 9 зоны нечувствительности в положесопротивлений с конденсатором 34, 40 ние «Откл, на вход усилителя 55 подает- я; ,.пистся по сути регулируемым демп-ся напряжение, смещающее выходное напряжение в данном канале в зону, где оно не оказывает влияния на выходной ток регулятора.
Блоки 14-16 масштабного регулирования выполнены аналогично.
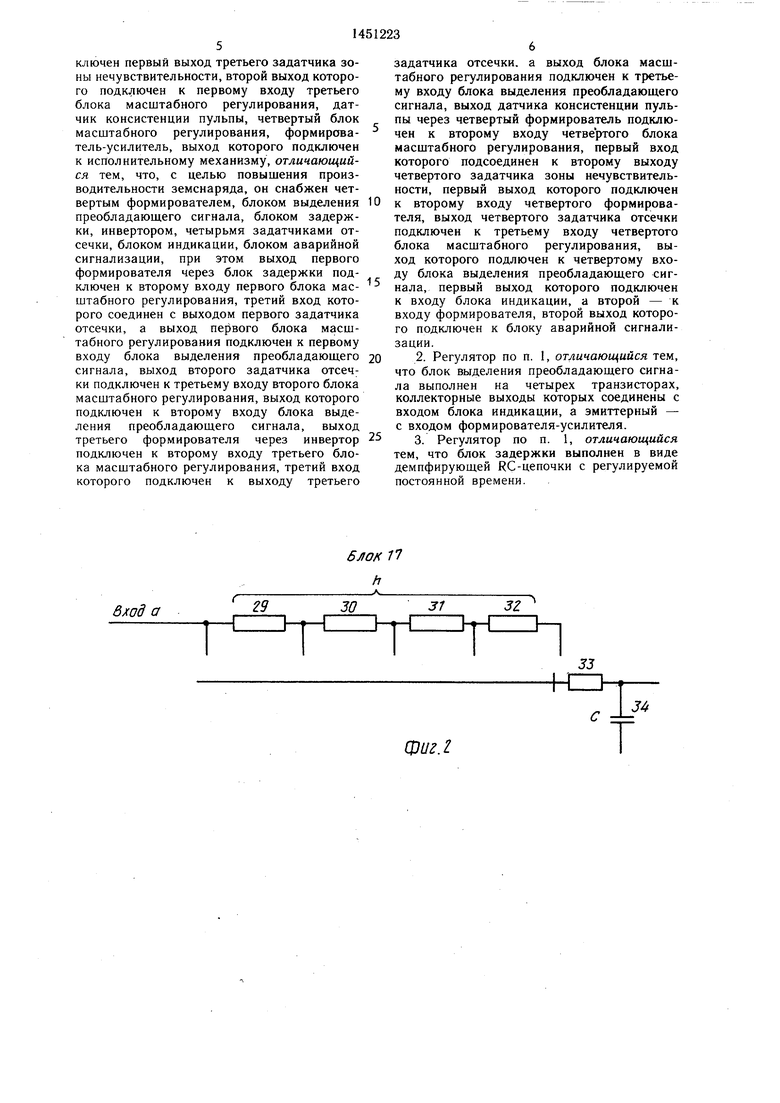
Формирователи 5-8 выполнены по общепринятой схеме на операционном усилителе. В задатчиках 9-12 зоны нечувствительности устанавливается величина терный выход Д - с формирователем- о предельного постоянного сигнала, который усилителем 24.поступает на формирователи. В последних
Выделение преобладающего сигнала бло- этот сигнал сравнивается с величиной сиг- ком 23 обеспечивается тем, что все че- нала, поступающего от соответствующего тыре входных сигнала в блок объеди- датчика.
няются по схеме диодного ИЛИ черезБлоки 19-22 отсечки могут быть выбаза-эмиттерные переходы транзисторов 55 полнены в виде набора резисторов, пере- 35-38 (фиг. 3) и напряжение их объе-ключаемых оператором. Под отсечкой подинения g будет равно наибольшему из нимается значение сигнала датчика, при напряжений, имеющихся на входах в блок котором выходной ток регулятора, а также
Ьером и имеет переключатель для установки постоянной времени, чтобы исключить : ежелательные остановки земснаряда при кратковременных его перегрузках, вызванных включениями в срезаемом грунте.
Блок 23 выделения преобладающего сигнала (фиг. 3) состоит из транзисторов 35-38, коллекторные выходы которых соединены с блоком 28 индикации, а эмит45
за вычетом падения напряжения на база- эмиттерном переходе. Использование база- эмиттерных переходов транзисторов в качестве элементов, образующих диодное ИЛИ дает возможность сформировать по коллекторным цепям этих транзисторов дискретный сигнал для индикации канала, по которому iB данный момент идет регулирование.
Сигнал с выхода g поступает на фор мирователь 24 выходного сигнала, задаюскорость папильонирования становятся равными нулю.
Регулятор управления режимом работы землесосного снаряда работает следующим образом.
Пр дзарительно ручками-уставками уста- навливаются в соответствующих единицах определенные значения величины нечувствительности с помощью задатчиков 9-12 зоны нечувствительности и величины отсечки с помощью задатчиков 19-22 отсечки для соответствующих датчиков: токовой нагрузки 1, вакуума 2, расхода пульпы 3, консистенции пульпы 4.
Если для датчиков 1, 2 и 4 величина нечувствительности меньше величины от- . нительного механизма 26 папильонажных сечки, то для датчика 3 величина не- лебедок земснаряда 27.
чувствительности устанавливается больше. При поступлении грунта в груктозавеличины отсечки.борное устройство с увеличением подачи
Выходные сигналы датчиков токовойгрунта при увеличении скорости папнльонагрузки I, вакуума 2, расхода пульпы 3,нирования повышается консистенция пу.:1ьпы,
консистенции пульпы 4 поступают соответст- 20 возрастает вакуум во всасывающем рчс:топроводе и нагрузка на двигате ь рык- лителя, но при этом снижается расход пульпы, что учитывается инвертором 18. При наличии регулятора удастся поаы- Формирователи 5-8 формируют по каж-сить производительность земснаряда за счет
дому каналу сигнал, который соответствует исключения вынужденных остановок н более
венно на первые входы формирователей 5-8, на вторые входы которых одновременно подаю-тся соответственно сигналы с задатчиков 9- 2 зоны нечувствительности.
передаточной характеристике или моменту начала и конц а регулирования в пределах предварительно заданных соответствующим задатчикам 9-12 зоны нечувствительности и задатчикам 19-22 отсечки.
Сигнал с первого формирователя 5 через блок 17 задержки поступает на второй вход блока 13 масштабного регулирования. Сигнал блоком 17 задержки демпфирует токовый сигнал, т. е. сигнал подается на цепочку CR, .содержащую з несколько сопротивлений 29-32 и конденсатор 34, и сглаживается ступенчатым переключением сопротивлений 29-32 и может быть установлен в течение определенного времени.
С второго формирователя 6 сигнал пос- 0 тупает на блок 14 масштабного регулирования, с третьего формирователя 7 через инвертор 18 - на вход третьего блока 15 масштабного регулирования, а с четплавной работы в оптимальном режиме для конкретных технологических условий работы земснаряда (дальность и высота гидротранспортиродйния, плотность грунта, 30 высота разрабатываемого грунта).
Учет четырех технологических параметров, по которым ведется регулирование режима работы земснаряда, к зволяет использовать регулятор в различных грунтовых и технологических условиях.
Регулирование скорости папильонирования ведется плавно по заданной переда- -точной характеристике в пределах и в масштабах, заданных установками зоны нечувствительности и отсечки.
Формула изобретения
чен первый выход первого задатчика зоны нечувствительности, второй выход которого подключен к первому в. первого блока масштабного регулирования, датчик
1. Регулятор управления режимом работы землесосного снаряда, содержащий датчик токовой нагрузки, выход которого иодсое- вертого формирователя 8 - на четвер- j. динен к первому входу первого форми- тый блок 16 масштабного регулирования.рователя, к второму входу которого подклюСигнал с выходов блоков 13-16 масштабного регулирования подается на базы транзисторов 35-38 на входы 1, 2, 3, 4 блока 23 выделения преобладающего сигнала, который выделяет сигнал, вызываю- Q вакуума, выход которого через второй щий наибольщее снижение выходного тока формирователь подключен к второму входу
второго блока масштабного регулирования, первый вход которого подключен к второму выходу второго задатчика зоны нечувствительности, первый выход которого подклюС одного из транзисторов 35-38 сигнал 5 чен к второму входу второго формиро- поступает на один из входов блока 28,вателя, датчик расхода пульпы, выход котоиндикации, который, открываясь, подает рого подключен к первому входу третьего сигнал, который, например, с помощьюформирователя, на второй вход которого подрегулятора, который обеспечивает наиболее высокую производительность работы земснаряда 27.
светодиода сигнализирует, по какому из датчиков в данный момент ведется регулирование режима работы земснаряда.
С второго выхода блока 23 выделения преобладающего сигнала с эмиттер- ного выхода Д сигнал подается на формирователь-усилитель 24, с первого выхода которого поступает на исполнительный механизм 26 и с второго выхода - на блок 25 азарийной сигнализации, срабатывание которого происходит в том случае, когда выходной ток регулятора под влиянием входных сигналов более 6 с остается равным О, что соответствует остановке неполз
плавной работы в оптимальном режиме для конкретных технологических условий работы земснаряда (дальность и высота гидротранспортиродйния, плотность грунта, 0 высота разрабатываемого грунта).
Учет четырех технологических параметров, по которым ведется регулирование режима работы земснаряда, к зволяет использовать регулятор в различных грунтовых и технологических условиях.
Регулирование скорости папильонирования ведется плавно по заданной переда- -точной характеристике в пределах и в масштабах, заданных установками зоны нечувствительности и отсечки.
Формула изобретения
чен первый выход первого задатчика зоны нечувствительности, второй выход которого подключен к первому в. первого блока масштабного регулирования, датчик
вакуума, выход которого через второй формирователь подключен к второму входу
ключей первый выход третьего задатчика зоны нечувствительности, второй выход которого подключен к первому входу третьего блока масштабного регулирования, датчик консистенции пульпы, четвертый блок масштабного регулирования, формирова- тель-усилитель, выход которого подключен к исполнительному механизму, отличающийся тем, что, с целью повышения производительности земснаряда, он снабжен четвертым формирователем, блоком выделения преобладаюшего сигнала, блоком задержки, инвертором, четырьмя задатчиками отсечки, блоком индикации, блоком аварийной сигнализации, при этом выход первого формирователя через блок задержки подключен к второму входу первого блока мае- штабного регулирования, третий вход которого соединен с выходом первого задатчика отсечки, а выход первого блока масштабного регулирования подключен к первому входу блока выделения преобладающего сигнала, выход второго задатчика отсеч; ки подключен к третьему входу второго блока масштабного регулирования, выход которого подключен к второму входу блока выделения преобладаюшего сигнала, выход третьего формирователя через инвертор подключен к второму входу третьего блока масштабного регулирования, третий вход которого подключен к выходу третьего
задатчика отсечки, а выход блока масштабного регулирования подключен к третьему входу блока выделения преобладающего сигнала, выход датчика консистенции пульпы через четвертый формирователь подключен к второму входу четвертого блока масштабного регулирования, первый вход которого подсоединен к второму выходу четвертого задатчика зоны нечувствительности, первый выход которого подключен к второму входу четвертого формирователя, выход четвертого задатчика отсечки подключен к третьему входу четвертого блока масштабного регулирования, выход которого подлючен к четвертому входу блока выделения преобладающего сигнала, первый выход которого подключен к входу блока индикации, а второй - к входу формирователя, второй выход которого подключен к блоку аварийной сигнализации.
2.Регулятор по п. 1, отличающийся тем, что блок выделения преобладающего сигнала выполнен на четырех транзисторах, коллекторные выходы которых соединены с входом блока индикации, а эмиттерный - с входом формирователя-усилителя.
3.Регулятор по п. 1, отличающийся тем, что блок задержки выполнен в виде демпфирующей RC-цепочки с регулируемой постоянной времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ЗЕМСНАРЯДА | 2010 |
|
RU2426838C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1973 |
|
SU378801A1 |
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА | 1992 |
|
RU2028654C1 |
| Электропривод постоянного тока | 1989 |
|
SU1760622A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
Изобретение относится к гидромеханизированному перемещению грунта. Цель изобретения - повышение произв-сти земснаряда путем автоматического обеспечения работы на эффективном режиме при равномерной подаче грунта в грунтоприемник. Устройство содержит датчики токовой нагрузки 1 двигателя рыхлителя, вакуума 2, расхода 3 пульпы и консистенции 4 пульпы, которые через соответствующие формирователи 5-8 подключены к блокам масштабного регулирования (БМР) 1316, выходы которых подключены к входам блока 23 выделения преобладающего сигнала. К вторым входам формирователей 5-8 подключены соответственно задатчики 9-12 зоны нечувствительности, а к вторым входам БМР 13-16 - задатчики 19-22 отсечки, причем между формирователем 5 и БМР 13 включен блок 17 задержки, а между фррмирователем 7 и БМР 15 - инвертор Г8. Формирователи 5-8 формируют по каждому каналу сигнал, соответствующий передаточной х-ке или моменту начала и конца регулирования в пределах, предварительно заданных соответствуюш.им задатчикам 9-12 и 1922. Блок 23 выделяет сигнал, вызывающий наибольшее снижение выходного тока регулятора, который через формирователь- усилитель 24 поступает на исполнительный механизм 26, обеспечивающий наиболее высокую производительность работы земснаряда 27. При этом блок индикации 28 сигнализирует, по какому из датчиков 1-4 в данный момент ведется регулирование режима работы. При выходном токе регулятора, равном О под влиянием входных сигналов более 6 с срабатывает блок 25 аварийной сигнализации, сообщающий об остановке исполнительного механизма 26. 2 з.п. ф-лы, 4 ил.. lO (Л ел ISS ЕчЭ СО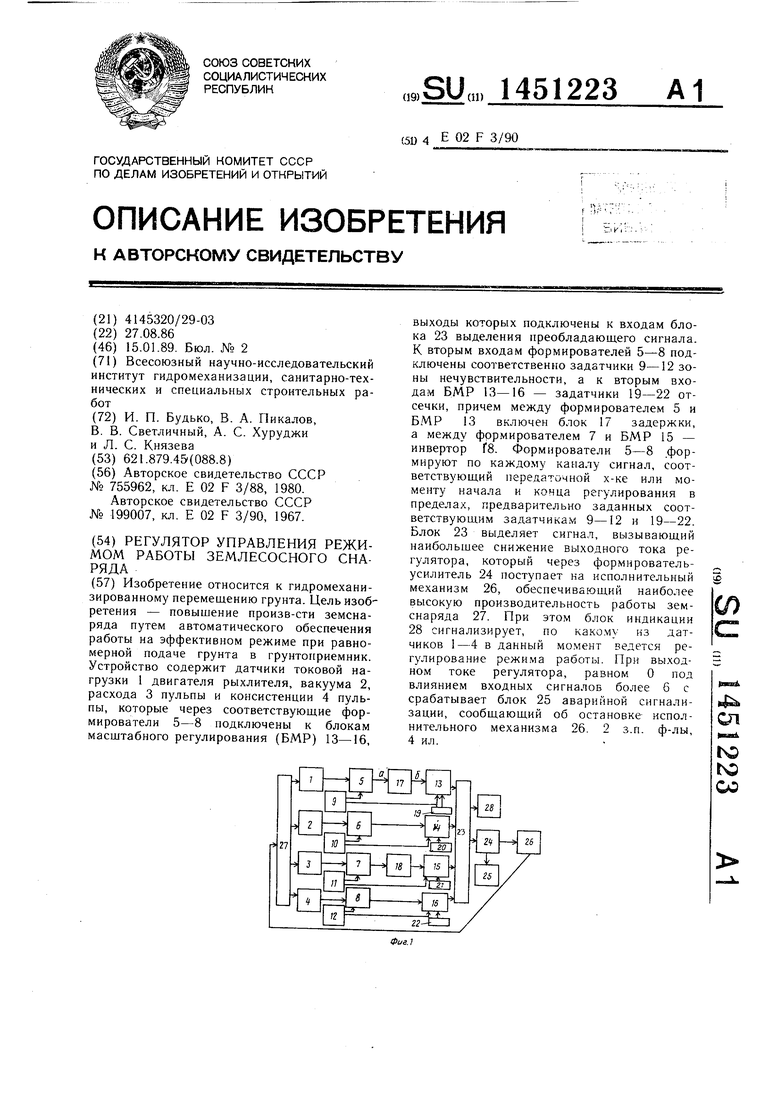
33
-СЗфиг. г
Отб/fOKa /7
-ОО
фиг. 3
УР
5
К оку25
Si
fe
| Авторское свидетельство СССР № 755962, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЗЕМЛЕСОСНЫМ СНАРЯДОМ | 0 |
|
SU199007A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
