Изобретение относится к автоматизации рабочих процессов и может быть использовано в системах управления рабочими процессами землеройно-транспортных машин, в частности бульдозерных агрегатов.
Известен способ управления рабочим органом землеройно-транспортной машины, заключающийся в том, что во время рабочего хода измеряют текущие тяговое усилие, действительную и теоретическую скорости движения машины, задают оптимальное значение тягового усилия и по знаку отклонения текущего значения тягового усилия от оптимального, полученного на основании результатов измерения и экспериментальных данных для различных грунтов, формируют управляющий сигнал на изменение положения рабочего органа [1] .
Наиболее близким по технической сущности к заявляемому способу является способ регулирования рабочих процессов землеройно-транспортных машин и устройство для его осуществления, включающий измерение действительной и теоретической скорости, определение по разности измеренных скоростей величины буксования движителя и сравнение ее с заданной величиной буксования, и изменение положения рабочего органа в зависимости от величины рассогласования, причем в процессе набора грунта определяют величину поступательного перемещения машины и при ее увеличении увеличивают заданную величину буксования, а также измеряют величину тягового усилия и при ее увеличении уменьшают заданную величину буксования. Устройство для его осуществления содержит задающий блок, блок определения буксования, входы которого соединены с выходами датчиков действительной и теоретической скоростей машины, а выход подключен к одному из входов блока сравнения, выход которого соединен с приводом управления рабочим органом, причем оно снабжено последовательно соединенными блоком интегрирования и блоком коррекции, а также блоком измерения тягового усилия [2] .
Недостатком аналога и прототипа является то, что объектом управления является только рабочий орган (отвал), при этом потери мощности силовой группы двигатель-гидротрансформатор имеют место из-за несоответствия действительного и теоретического буксования гидротрансформатора, а также то, что при настройке задающего значения буксования не учитываются конкретные категории почв, что, как следствие, приводит к низкой эффективности регулирования рабочих процессов земельно-транспортных машин.
Целью изобретения является повышение эффективности регулирования путем оптимизации буксования движителя и гидротрансформатора.
Цель достигается тем, что в известном способе, включающем измерение действительной и теоретической скоростей, определение величины действительного буксования, сравнение ее с заданной величиной теоретического буксования и замену положения рабочего органа в зависимости от величины и знака рассогласования, измеряют усилие сопротивления на отвале во время рабочего хода и определяют в зависимости от него заданную величину теоретического буксования, задают коэффициенты зависимости теоретического буксования от усилия сопротивления на отвале с учетом категории разрабатываемого грунта, измеряют скорость вращения двигателя, вычисляют величину действительного буксования гидротрансформатора и сравнивают ее с заданной величиной теоретического буксования гидротрансформатора и в зависимости от величины и знака рассогласования изменяют скорость вращения двигателя.
Цель достигается также устройством для регулирования рабочих процессов землеройно-транспортных машин, содержащим блок определения действительного буксования движителя, входы которого соединены с выходами датчиков действительной и теоретической скоростей машины, выход которого подключен к одному из входов блока сравнения теоретического и действительного буксований, выход которого соединен с электрогидравлическим приводом управления рабочим органом, снабженным блоками измерения скорости вращения каждой из звездочек, блоком задания требуемых коэффициентов зависимости теоретического буксования движителя от усилия сопротивления на отвале, блоком вычисления теоретического буксования движителя, соединенным входами с выходом блока задания коэффициента зависимости теоретического буксования от усилия сопротивления на отвале и с выходом блока вычисления усилия сопротивления на отвале, а выходом - с блоком сравнения величин теоретического и действительного буксований движителя, причем блок вычисления усилия сопротивления на отвале подключен входами к выходам блоков измерения усилия сопротивления на левом и правом бортах машины, блоком вычисления величины действительного буксования гидротрансформатора, соединенным входами с выходом блока вычисления средней теоретической скорости и с выходом блока измерения частот вращения двигателя, а выходом - с первым входом блока сравнения величин теоретического и действительного буксований гидротрансформатора, второй вход которого соединен с выходом блока задания значения теоретического буксования гидротрансформатора, выход блока сравнения величин теоретического и действительного буксований гидротрансформатора, соединеный с электрогидравлическим приводом управления рейкой топливного насоса двигателя внутреннего сгорания.
В известных науке и технике решениях заявители не обнаружили совокупности отличительных признаков, таких как в заявленном техническом решении, проявляющих аналогичные свойства и позволяющих получить положительный эффект, указанный в поставленной цели.
Таким образом, заявляемые способ и устройство соответствуют критерию изобретения "Существенное отличие".
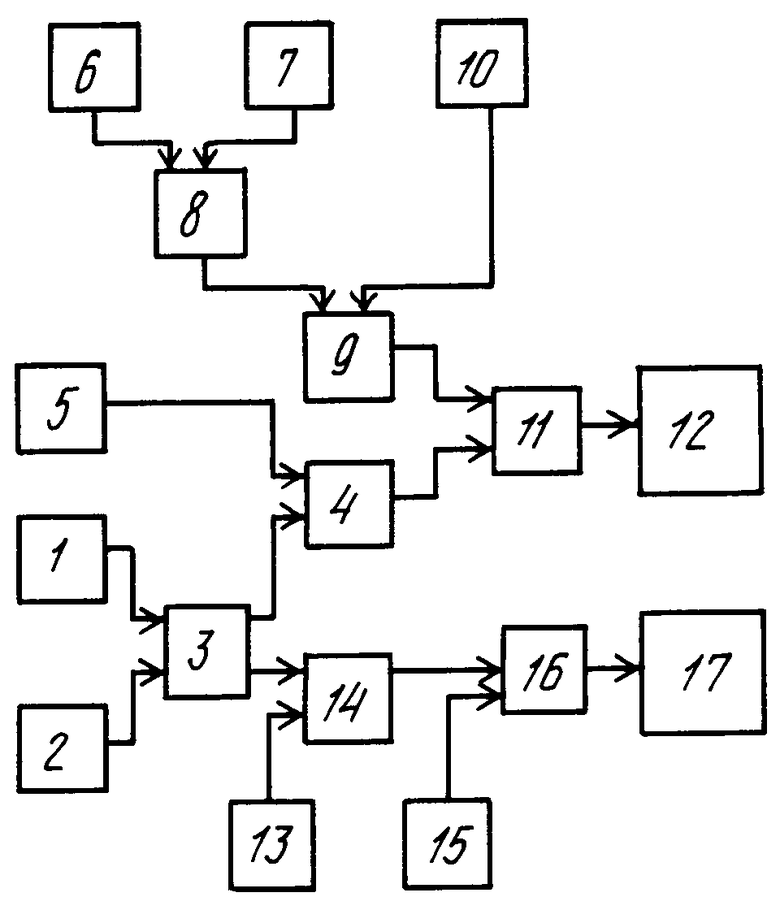
На чертеже представлена блок-схема устройства, реализующего способ регулирования рабочих процессов землеройно-транспортной машины.
Устройство содержит блоки 1,2 измерения частоты вращения ведущих звездочек землеройно-транспортной машины подключенные выходом через блок 3 вычисления средней теоретической скорости землеройно-транспортной машины к первому входу блока 4 вычисления действительного буксования движителя, блок 5 измерения действительной скорости землеройно-транспортной машины, подключенный выходом к второму входу блока 4 вычисления действительного буксования движителя, блоки 67 измерения усилия сопротивления на бортах землеройно-транспортной машины, подключенные выходом через блок 8 вычисления среднего усилия сопротивления на отвал к первому входу блока 9 вычисления теоретического буксования движителя землеройно-транспортной машины, блок 10 задания требуемых коэффициентов зависимости теоретического буксования движителя землеройно-транспортной машины от усилия сопротивления на отвале δтд= f(Fсопр), выход которого подключен к второму входу блока 9 вычисления теоретического буксования движителя землеройно-транспортной машины, блок 11 сравнения действительного и теоретического буксований движителя, подключенного входами к блоку 9 вычисления теоретического буксования движителя землеройно-транспортной машины и блоку 4 вычисления действительного буксования движителя землеройно-транспортной машины, а выход к электрогидравлическому приводу 12 управления рабочим органом (отвалом), причем устройство дополнительно содержит блок 13 измерения частот вращения двигателя внутреннего сгорания, подключенный выходом к первому входу блока 14 вычисления действительного буксования гидротрансформатора, к второму входу которого подключен блок 3 вычисления средней теоретической скорости землеройно-транспортной машины, блок 15 задания теоретического буксования гидротрансформатора, подключенный выходом к первому входу блока 16 сравнения теоретического и действительного буксований гидротрансформатора, к второму входу которого подключен блок 14 вычисления действительного буксования гидротрансформатора, блок 16 сравнения подключен к входу электрогидравлического привода 17 управления рейкой топливного насоса двигателя внутреннего сгорания.
В качестве блоков 6, 7 измерения усилия сопротивления на бортах землеройно-транспортной машины могут быть использованы силовые магнитотропные датчики, установленные в пальцах, соединяющих толкающие брусья с трактором.
В качестве блока 5 измерения реальной скорости землеройно-транспортной машины используется ультразвуковой доплеровский датчик.
В качестве блоков 3, 4, 8, 9 и 14 вычисления могут быть использованы аналоговые микрокомпьютеры К1813, содержащие быстрый многоразрядный микропроцессор, аналоговый компаратор и цифроаналоговый восьмиразрядный преобразователь, который может быть запрограммирован на вывод цифровой информации.
Требуемый коэффициент зависимости теоретического буксования движителя землеройно-транспортной машины от усилия сопротивления на отвале δтд= f(Fсопр) задается в зависимости от категории и условия разрабатываемого грунта с помощью блока 10, который может быть реализован на базе набора из n предварительно оттарированных прецизионных резисторов (n - число категории грунта, в данном случае n = 4).
Сущность способа и принцип работы реализующего его устройства заключается в следующем.
Для повышения эффективности регулирования путем оптимизации буксования движителя и гидротрансформатора необходимо, чтобы в каждый момент времени в любых условиях работы величина действительного буксования движителя землеройно-транспортной машины поддерживала такое значение, которое соответствовало реализуемому тяговому усилию, кроме того необходимо также, чтобы скорость вращения двигателя внутреннего сгорания не выходила за пределы, соответствующие зоне максимального коэффициента полезного действия выходной характеристики группы гидротрансформатора-двигателя.
Для достижения поставленной цели, во время рабочего хода блоки 1 и 2 измеряют скорости вращения левой и правой звездочек, выходные сигналы блоков 1 и 2 поступают в блок 3, который вычисляет среднюю теоретическую скорость землеройно-транспортной машины (формула 1).
Vт.ср.=  ·
·  (1) из блока 3 сигнал поступает в блок 4 вычисления действительного буксования движителя землеройно-транспортной машины (формула 2), в который также поступает сигнал из блока 5 измерения реальной скорости землеройно-транспортной машины.
(1) из блока 3 сигнал поступает в блок 4 вычисления действительного буксования движителя землеройно-транспортной машины (формула 2), в который также поступает сигнал из блока 5 измерения реальной скорости землеройно-транспортной машины.
δДД= 1 -  , (2) блоки 6 и 7 измеряют усилия сопротивления соответственно в левом и правом бортах землеройно-транспортной машины, выходные сигналы блоков 6 и 7 поступают в блок 8, который вычисляет усилия сопротивления на отвале (формула 3)
, (2) блоки 6 и 7 измеряют усилия сопротивления соответственно в левом и правом бортах землеройно-транспортной машины, выходные сигналы блоков 6 и 7 поступают в блок 8, который вычисляет усилия сопротивления на отвале (формула 3)
Fсопр = Fл + Fп, (3) из блока 8 сигнал поступает в блок 9 вычисления теоретического буксования землеройно-транспортной машины (формула 4)
δт.д. = Ко - К˙Fсопр, (4) в который также поступает сигнал из блока 10 задания требуемых коэффициентов зависимости теоретического буксования от усилия сопротивления δт.д. = f(Fсопр), из блоков 9 и 4 сигналы поступают в блок 11 сравнения теоретического и действительного буксований движителя землеройно-транспортной машины, который в случае, если разность поступательных сигналов незначительна, дает выходной сигнал, равный нулю. В противном случае в зависимости от знака и величины рассогласования формируется сигнал включения электрогидравлического привода 12 на заглубление при отрицательном знаке или выглубление при положительном знаке рабочего органа (отвала). В то же время блок 13 измеряет скорость вращения двигателя внутреннего сгорания и передает сигнал в блок 14 вычисления действительного буксования гидротрансформатора (формула 5)
δДГТ= 1 -  · iТР, (5) в блок 14 поступает сигнал также из блока 3 вычисления средней теоретической скорости землеройно-транспортной машины, из блока 15 задания теоретического буксования гидротрансформатора и блока 14 вычисления действительного буксования гидротрансформатора сигналы поступают в блок 16 сравнения теоретического и действительного буксований гидротрансформатора, который в случае, если разность поступающих сигналов укладывается в заданный интервал, дает выходной сигнал, равный нулю. В противном случае в зависимости от знака и величины рассогласования формируется сигнал включения электрогидравлического привода 17 на увеличение при положительном знаке или уменьшение при отрицательном знаке подачи топлива путем перемещения рейки топливного насоса двигателя внутреннего сгорания в одну или другую сторону, где Vт.ср - средняя теоретическая скорость землеройно-транспортной машины;
· iТР, (5) в блок 14 поступает сигнал также из блока 3 вычисления средней теоретической скорости землеройно-транспортной машины, из блока 15 задания теоретического буксования гидротрансформатора и блока 14 вычисления действительного буксования гидротрансформатора сигналы поступают в блок 16 сравнения теоретического и действительного буксований гидротрансформатора, который в случае, если разность поступающих сигналов укладывается в заданный интервал, дает выходной сигнал, равный нулю. В противном случае в зависимости от знака и величины рассогласования формируется сигнал включения электрогидравлического привода 17 на увеличение при положительном знаке или уменьшение при отрицательном знаке подачи топлива путем перемещения рейки топливного насоса двигателя внутреннего сгорания в одну или другую сторону, где Vт.ср - средняя теоретическая скорость землеройно-транспортной машины;
R - радиус ведущей звездочки землеройно-транспортной машины;
nл - частота вращения левой звездочки землеройно-транспортной машины;
nп - частота вращения правой звездочки землеройно-транспортной машины;
δдд - действительное буксование движителя землеройно-транспортной машины;
Vр - реальная скорость землеройно-транспортной машины;
Fсопр - усилие сопротивления на отвал;
Fл - усилие сопротивления на левом борту землеройно-транспортной машины;
Fп - усилие сопротивления на правом борту землеройно-транспортной машины;
Ко, К - постоянные коэффициенты зависимости теоретического буксования движителя землеройно-транспортной машины от усилия сопротивления на отвале, характеризующие категории разрабатываемого грунта;
δт.д. - теоретическое буксование движителя землеройно-транспортной машины;
δдгт - действительное буксование гидрот рансформатора;
iтр - передаточное число трансмиссии землеройно-транспортной машины;
nдвс - частота вращения двигателя внутреннего сгорания землеройно-транспортной машины;
δтгт - теоретическое буксование гидротрансформатора землеройно-транспортной машины.
В отличие от известного способа заданную величину теоретического буксования движителя определяют в зависимости конкретно от категории разрабатываемого грунта с помощью зависимости изменения буксования от усилия сопротивления δтд= f(Fсопр). Причем в известном способе определяют только величину буксования движителя землеройно-транспортной машины, а в предложенном определяют также и величину буксования гидротрансформатора. В известном способе меняют только положение рабочего органа, в предложенном и положение рабочего органа, и скорость вращения двигателя внутреннего сгорания, все эти отличия обеспечивают повышение эффективности регулирования за счет более точного учета изменения грунтовых условий и исключения возможности работы с недогрузкой по тяговому усилию или с повышенным буксованием движителя землеройно-транспортной машины, а также за счет поддержания оптимального буксования гидротрансформатора, соответствующего работе двигателя в зоне максимального коэффициента полезного действия (внешняя характеристика группы двигатель-гидротрансформатор).
Предлагаемый способ позволяет повысить производительность землеройно-транспортной машины на 8-12% . (56) 1. Авторское свидетельство СССР N 1439272, кл. Е 02 F 9/20, 1986.
2. Авторское свидетельство СССР N 1315571, кл. Е 02 F 9/20, 1985.
Сущность изобретения: устройство содержит два блока измерения частоты вращения ведущих звездочек землеройно-транспортной машины, блок вычисления средней теоретической скорости землеройно-транспортной машины, блок вычисления действительного буксования движителя, блок измерения действительной скорости землеройно-транспортной машины, два блока измерения усилия сопротивления на бортах землеройно-транспортной машины, блок вычисления среднего усилия сопротивления на отвал, блок вычисления теоретического буксования движителя землеройно-транспортной машины, блок задания требуемых коэффициентов зависимости теоретического буксования движителя землеройно-транспортной машины от усилия сопротивления на отвале, блок сравнения действительного и теоретического буксования движителя, электрогидравлический провод управления рабочим органом (отвалом), блок измерения частот вращения двигателя внутреннего сгорания, блок вычисления действительного буксования гидротрансформатора, блок задания теоретического буксования гидротрансформатора, блок сравнения теоретического и действительного буксования гидротрансформатора, электрогидравлический привод управления рейкой топливного насоса двигателя внутреннего сгорания. 2 с. п. ф-лы, 1 ил.
