Изобретение относится к радиотехнике и может быть использовано в радиотехнических системах измерения координат и параметров движения объектов, в телеметрических и совмещенных радиолиниях, использующих сигналы с амплитудной модуляцией и фазовой манипуляцией.
Известен способ компенсации сдвига частоты, основанный на квадратурном фазовом детектировании принимаемого сигнала с помощью опорного сигнала с номинальной частотой, определении с помощью полученных синфазной и квадратурной составляющих детектированного сигнала приращений фазы за равные интервалы времени, накоплении приращений, формировании синусного и косинусного сигналов от суммарной фазы, квадратурного модулирования с их помощью опорного сигнала с удвоенной номинальной частотой и преобразовании частоты принимаемого сигнала с помощью модулированного сигнала. Известный способ реализован в мультиплексорном приемнике спутниковой РНС НАВСТАР (патент США N 4468793, кл. G 01 S 5/02, 1984).
Сущность способа состоит в следующем.
Подвергают квадратурному фазовому детектированию (КФД) принимаемый сигнал
Uвх(t) = Uф(t) cos[(ωo+ωg)t+ϕ ] (1П) с помощью опорного сигнала
Uo(t) = cos ωo t, (2П) где Uф(t) - отражает закон фазовой манипуляции;
ωo - номинальная частота;
ωg - сдвиг частоты принимаемого сигнала относительно частоты ωoопорного сигнала;
ϕ - начальный неизвестный сдвиг фазы сигнала (1П) относительно фазы опорного сигнала (2П) в момент времени t = 0.
КФД сводится к умножению сигнала (1П) на опорный сигнал (2П) и его квадратурную составляющую (сдвинутую на угол π/2)
Uск(t) = cos( ωo t + π /2) = -sin ωo t, (3П) с последующей низкочастотной фильтрацией (выделением разностной частоты), в результате чего получают синфазную
Uc(t) = Uф(t) cos( ωg t + ϕ ) (4П) и квадратурную
Us(t) = Uф(t) sin( ωg t + ϕ ) (5П) составляющие детектированного сигнала.
Определяют приращения фазы Δϕl входного сигнала (1П) за счет сдвига частоты ωg на интервалах tl -tl-1 = Δ с помощью сигналов (4П) и (5П) по правилу

 (6П) Это упрощенное выражение для Δϕl справедливо для Uф(t) = Uф(tl-1) и малых Δ . Прототип может компенсировать сдвиг частоты только фазоманипулированных сигналов без амплитудной модуляции. Для таких сигналов /Uф(tl)/ = /Uф(tl-1), а Uф2(t) = const и может быть принято равным единице. В тех интервалах Δ , где фаза принимаемого сигнала изменяется на π за счет фазовой манипуляции Uф(tl) = -Uф(tl-1), поэтому Δϕl принимает знак, противоположный истинному знаку приращения фазы за счет сдвига частоты. В описании прототипа приведено более сложное выражение для Δϕl, учитыающее это изменение знака.
(6П) Это упрощенное выражение для Δϕl справедливо для Uф(t) = Uф(tl-1) и малых Δ . Прототип может компенсировать сдвиг частоты только фазоманипулированных сигналов без амплитудной модуляции. Для таких сигналов /Uф(tl)/ = /Uф(tl-1), а Uф2(t) = const и может быть принято равным единице. В тех интервалах Δ , где фаза принимаемого сигнала изменяется на π за счет фазовой манипуляции Uф(tl) = -Uф(tl-1), поэтому Δϕl принимает знак, противоположный истинному знаку приращения фазы за счет сдвига частоты. В описании прототипа приведено более сложное выражение для Δϕl, учитыающее это изменение знака.
Накапливают сигналы приращений фазы Δϕl, в результате чего образуют сигнал текущей фазы
ϕk=  = ωgkΔ= ωgtk, (7П) формируют синфазную
= ωgkΔ= ωgtk, (7П) формируют синфазную
Ugc(t) = cos ωgtk≃cosωgt (8П) и квадpатуpную
Ugs (t) = sin ωgtk≃ sinωgt (9П) составляющие сигнала с частотой сдвига ωg. Из-за малости Δ в выражениях (7П) и (8П) осуществлен переход от дискретного времени к непрерывному. Следовательно, операции 2-4 направлены на снятие фазовой манипуляции. Амплитудная модуляция приводит к искажению приращений фазы, так как согласно формуле (6П) непосредственно входит в
Δϕl= ωgΔ·U
Подвергают полученный сигнал квадратурной модуляции: из сигнала удвоенной частоты
U2oc(t) = cos 2 ωot, (10П) принимаемого за синфазную составляющую, формируют квадратурную составляющую
Ucos(t) = -sin 2 ωot, (11П) умножают синфазную (10П) и квадратурную (11П) составляющие опорного сигнала с удвоенной номинальной частотой на соответствующие составляющие (8П) и (9П) сигнала с частотой сдвига ωg, складывают произведения, в результате чего получают сигнал
U20(t) = cos 2ωot˙cosωgt-sin2ωot˙sinωgt= cos(2ωo+ωg)t (12П)
Преобразуют принимаемый сигнал (1П) по разностной частоте с помощью опорного сигнала (12П), в результате чего получают сигнал
Uk(t) = Uф(t) cos (ωot+ϕ) , (13П) в котором скомпенсирован частотный сдвиг ωg. Однако в сигнале (13П) осталась неизвестная начальная фаза ϕ, которую при дальнейшей обработке, например при выделении модулирующего сигнала Uф(t) необходимо исключить.
Однако этот способ не обеспечивает компенсацию начального неизвестного сдвига фазы принимаемого сигнала, что следует из выражения (13П). Это усложняет последующую обработку сигнала.
Кроме того, отсутствует возможность компенсации частоты при наличии амплитудной модуляции принимаемого сигнала, т. е. когда Uф2(t) ≠ 1. В этом случае сигнал Uф2(t) согласно выражению (6П) входит сомножителем в сигнал приращения фазы
Δϕl≃ U
Эти недостатки существенно ограничивают функциональные возможности прототипа. Кроме того, сложна его реализация.
Целью изобретения является расширение функциональных возможностей способа путем компенсации начального неизвестного сдвига фазы одновременно с компенсацией сдвига частоты при наличии амплитудной модуляции и обеспечение простоты его реализации.
Это достигается тем, что при способе, включающем операции квадратурного фазового детектирования, демодуляции фазы и квадратурной модуляции, перед квадратурным фазовым детектированием принимаемый сигнал подвергают преобразованию в сигнал, содержащий компоненту с удвоенной частотой, например, посредством возведения в квадрат, полосовой фильтрации, предельному ограничению и делению частоты на 2, а синфазную и квадратурную составляющую детектированного сигнала используют для квадратурной модуляции принимаемого сигнала, причем знак одной из составляющих изменяют на обратный. Введение новых операций и выполнение их в определенной последовательности с известными операциями позволяет исключить начальную неизвестную фазу принимаемого сигнала одновременно с компенсацией частотного сдвига, а также упростить способ и его реализацию.
Применение операции предельного ограничения снимает амплитудную модуляцию и повышает точность компенсации начальной неизвестной фазы. Возводят в квадрат принимаемый сигнал
Uвх(t) = U(t) cos[(ωo+ωg)t+ϕ] , (1) в результате чего получают сигнал, содержащий компоненту с удвоенной частотой
U
ωo - известная номинальная частота опорного сигнала
Uo(t) = cos ωot, (3)
ωg - сдвиг частоты принимаемого сигнала относительно частоты опорного сигнала;
ϕ - начальный неизвестный сдвиг фазы принимаемого сигнала относительно опорного в момент времени t = 0.
После выполнения этой операции снимают фазовую манипуляцию, так как Uф2(t) = 1.
Подвергают сигнал (2) полосовой фильтрации, что дает (постоянные коэффициенты опускаем)
Uпф(t)= U
Подвергают сигнал (4) предельному ограничению и получают сигнал
Uп2(t)= UAo(t) 2[(ωo+ωg)t+ϕ] , (5) где UAo(t) = 1 при UA(t) ≠0; UAo(t) = 0 при UA(t) = 0,
2[(ωo+ωg)t+ϕ] , (5) где UAo(t) = 1 при UA(t) ≠0; UAo(t) = 0 при UA(t) = 0,  - сигнал типа меандра с соответствующей частотой и фазой.
- сигнал типа меандра с соответствующей частотой и фазой.
Делят частоту сигнала UП2(t) на 2, что дает
Uп1(t)= UAo(t) [(ωo+ωg)t+ϕ] . (6) Сформированный принимаемый сигнал (6) подвергают квадратурному фазовому детектированию с помощью опорного сигнала (3), в результате чего получают синфазную
[(ωo+ωg)t+ϕ] . (6) Сформированный принимаемый сигнал (6) подвергают квадратурному фазовому детектированию с помощью опорного сигнала (3), в результате чего получают синфазную
Ugc(t) = UAo(t) cos( ωgt+ϕ ) (7) и квадратурную
Ugs(t) = UAo(t) sin( ωgt+ϕ) (8) составляющие детектированного сигнала.
Квадратурное фазовое детектирование сводится к двухканальному параллельному фазовому детектированию, когда опорные сигналы каналов сдвинуты по фазе на π/2.
Осуществляют квадратурную модуляцию принимаемого сигнала (1) посредством выделения из него, как синфазной составляющей, квадратурной составляющей посредством поворота его фазы на π/2, т. е.
Uкв(t) = U(t) cos[ (ωo+ωg) t + ϕ
+ π /2] = -U(t) sin[ (ωo+ωg)t + ϕ ] , (9) умножения этих составляющих на соответствующие составляющие (7) и (8) детектированного сигнала, предварительно изменив знак одной из них на противоположный, и сложения произведений, в результате чего получают принимаемый сигнал, свободный от фазового и частотного сдвигов
Uвых(t) = U(t) cos[ ( ωo+ωg)t + ϕ ] x
x UAo(t) c os ( ωgt+ϕ) +
+ { -U(t) sin[ (ωo+ωg)t + ϕ ] } x
x{ UAo(t) sin(ωgt+ϕ)} = U(t) cos ωot. (10) В последнем члене выражения (10), во-первых, опущен сомножитель UAo(t), так как он равен единице во всех временных интегралах, где входящий в U(t) сомножитель UA(t) = 0, во-вторых, на обратный изменен знак квадратурной составляющей (8) детектированного сигнала.
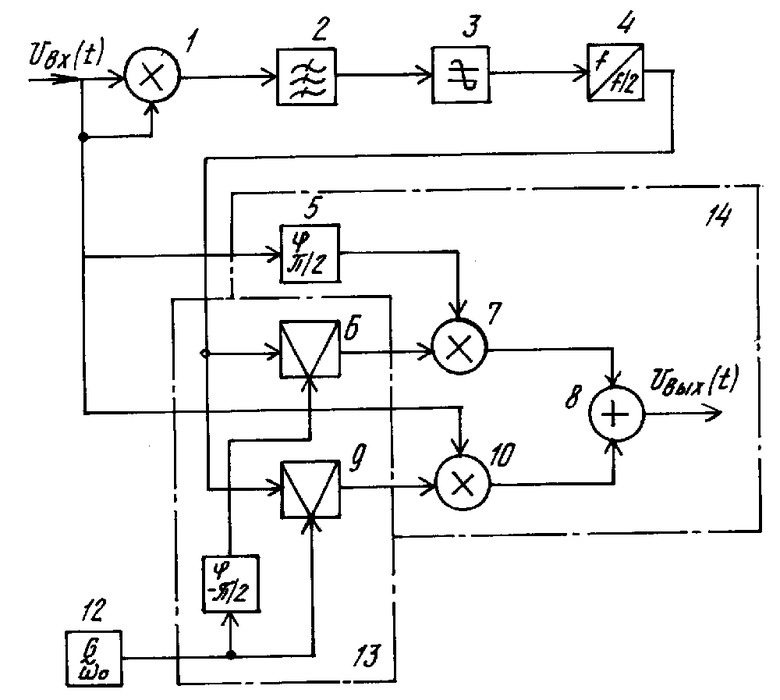
На чертеже приведена структурная схема устройства для осуществления предложенного способа, где 1, 7, 10 - умножители, 2 - полосовой фильтр, настроенный на частоту 2( ωo+ωg), 3 - предельный ограничитель, 4 - делитель частоты на 2; 5, 11 - фазовращатели на угол ±π /2; 6, 9 - фазовые детекторы; 8 - сумматор; 12 - генератор опорного сигнала с номинальной частотой. При этом умножитель 1 с объединенными входами через последовательно соединенные полосовой фильтр 2, предельный ограничитель 3 и делитель 4 частоты подключен к входам фазовых детекторов 6 и 9. Управляющий вход фазового детектора 6 через фазовращатель 11 на угол - π /2 соединен с выходом генератора 12 опорного сигнала, а его выход через первый вход умножителя 7, второй вход которого через фазовращатель 5 на угол π /2, соединен с входами умножителя 1, подключен к первому входу сумматора 8, управляющий вход фазового детектора 9 соединен с выходом генератора 12 опорного сигнала, а его выход через первый вход умножителя 10, второй вход которого соединен с входами умножителя 1, подключен к второму входу сумматора 8, выход которого является выходом устройства.
Устройство работает следующим образом.
На его вход поступает сигнал (1). После возведения его в квадрат на выходе умножителя 1 имеет место сигнал (2), содержащий низкочастотную составляющую UA2(t), и сигнал с удвоенной частотой заполнения. Этот сигнал проходит через полосовой фильтр 2, настроенный на среднюю частоту 2(ωo+ωg) с полосой, соответствующей ширине спектра сигнала UA2(t). На вход предельного ограничителя 3 поступает сигнал (4), на его выходе - ограничительный сигнал (5), который имеет форму меандра на всех временных интервалах, где UA(t) ≠ 0. На выходе делителя 4 частоты сигнал (6) имеет ту же форму, что и сигнал (5) на его входе, но частота изменения полярности в 3 раза меньше. Этот сигнал поступает на вход квадратурного фазового детектора (КФД) 13, включающего два фазовых детектора 6 и 9, а также фазовращатель 11 на угол - π/2. В рассматриваемом устройстве поворот фазы опорного сигнала на угол - π /2 - один из способов изменения знака на противоположный, в данном случае квадратурной составляющей детектированного сигнала.
Квадратурная составляющая (8) детектированного сигнала (но с противоположным знаком) с фазового детектора 6 поступает на первый вход умножителя 7, а синфазная составляющая (7) с выхода фазового детектора 9 подается на первый вход умножителя 10. Умножители 7 и 10 совместно с фазовращателем 5 и сумматоров 8 составляют функциональную схему квадратурного модулятора (КМ) 14, в данном случае входного сигнала. На вход этой схемы (соединенные входы фазовращателя 5 и умножителя 10) подается входной сигнал (1). Сигнал на выходе этой схемы, являющийся выходом устройства, формируется согласно выражению (10).
Положительный эффект заключается в том, что предложенный способ одновременно с компенсацией сдвига частоты, как это следует из выражения (1), автоматически исключает начальный неизвестный сдвиг фазы ϕ принимаемого сигнала относительно фазы опорного сигнала. Этот паразитный параметр присутствует в оконечном сигнале (13П), получаемом способом-прототипом, и существенно осложняет дальнейшую обработку этого сигнала. Например, чтобы выделить модулирующий сигнал Uф(t) необходимо подвергнуть сигнал (13П) синхронному детектированию, т. е. необходимо подстроить фазу опорного сигнала (2П). Осуществление этой операции - задача сложная.
Предложенный способ обеспечивает компенсацию сдвига частоты принимаемого сигнала не только с фазовой манипуляцией, на что способен прототип, но и с амплитудной модуляцией. В прототипе при UA2(t) ≠ 1 согласно выражению (6П) приращение фазы
Δϕl= U
Таким образом, дополнительная по сравнению с прототипом возможность одновременно со сдвигом частоты компенсировать начальный неизвестный сдвиг фазы при наличии амплитудной модуляции свидетельствует о значительном расширении функциональных возможностей предложенного способа.
Использование: в радиотехнических системах измерения координат и параметров движения объектов, в телеметрических линиях, использующих сигналы с фазовой манипуляцией. Сущность изобретения: способ компенсации сдвига частоты сигнала с начальной неизвестной фазой содержит прием сигнала, возведение его в квадрат, полосовую фильтрацию, предельное ограничение, деление частоты на два, квадратурное фазовое детектирование, демодуляцию фазы и квадратурную модуляцию. Квадратурную и синфазную составляющие детектированного сигнала используют для квадратурной модуляции входного сигнала, причем знак одной из составляющих изменяют на обратный. 1 ил.
СПОСОБ КОМПЕНСАЦИИ СДВИГА ЧАСТОТЫ СИГНАЛА С НЕИЗВЕСТНОЙ НАЧАЛЬНОЙ ФАЗОЙ, включающий операции квадратурного фазового детектирования, демодуляций фазы и квадратурной модуляции, отличающийся тем, что, с целью расширения функциональных возможностей и упрощения перед упомянутой операцией фазового детектирования производят фазовую и амплитудную демодуляцию входного сигнала путем последовательного преобразования его в сигнал, содержащий компоненту с удвоенной частотой, например посредством возведения в квадрат, полосовой фильтрации, предельного ограничения и деления частоты на два, а синфазную и квадратурную составляющие детектированного сигнала используют для квадратурной модуляции принимаемого сигнала, причем знак одной из составляющих изменяют на обратный.
