Изобретение относится к технике фазовых измерений по многочастотным сигналам и может использоваться в системах единого времени для синхронизации разнесенных часов по радиоканалу.
Известна система дистанционной передачи и приема временной информации [1] Ведущая станция системы передает временную информацию, излучая один импульс в секунду и эталонную частоту 1 МГц. Результаты измерений на ведомых станциях по герцовому сигналу и фазовые измерения на частоте 1 МГц используются для поддержания ведомых станций привязанными по времени. Используемый в системе способ привязки не может быть применен в низкочастотном диапазоне радиоволн, например в СДВ-диапазоне. Вследствие узкой полосы пропускания антенных систем импульсные сигналы, излучаемые СДВ-передающими станциями, имеют длительность фронта 1-5 мс. Из-за большой длительности фронта узкополосных сигналов однозначный переход от измерений по огибающей радиоимпульсов к измерениям по несущей частоте невозможен.
В СДВ-диапазоне используют многочастотные сигналы для передачи частотно-временной информации. Например, при передаче двух гармонических сигналов с частотами f1 и f2, моменты перехода через нуль которых привязаны к шкале времени передающего пункта, сдвиг между сигналами времени, связанными с "нулями" сигнала разностной частоты f2 f1, и шкалой приемного пункта определяется по формуле
τ  где ϕ1* f1 τ1 и ϕ2* f2 τ2 выраженные в долях цикла (периода) фазы сигналов с частотами f1 и f2, измеренные в точке приема;
где ϕ1* f1 τ1 и ϕ2* f2 τ2 выраженные в долях цикла (периода) фазы сигналов с частотами f1 и f2, измеренные в точке приема;
τ1 τ2 результаты временных измерений.
Сигналы f1 и f2 могут передаваться последовательно, одновременно (в виде биений) или в режиме частотной манипуляции.
Наиболее близким к заявляемому является устройство для долговременного сличения частот высокостабильных генераторов по радиосигналам [2]
Устройство содержит задающий генератор, хранитель времени, цифровой индикаторный блок (измеритель временных интервалов), блок пилотирования, радиоприемник, блок управления, коммутатор режима, компенсационный фазометр, преобразователь частота код, сумматор, сумматор кода, генератор заданного количества импульсов, формирователь текущего кода, блок коррекции фазового отсчета, формирователь кода.
Устройство работает следующим образом.
Перед началом приема радиосигнала определяется задержка сигнала в радиоприемном тракте при помощи калибровочного сигнала, формируемого блоком пилотирования из сигналов хранителя времени. Спектр пилот-сигнала содержит частоту, равную принимаемой частоте f1. С выхода радиоприемника калибровочный сигнал частоты f1 поступает на фазометр, где измеряется фаза пилот-сигнала ϕnc1*. После пилотирования измеряется с помощью фазометра фаза ϕc1* реального сигнала с частотой f1. Разность ϕ1*= ϕc1* ϕnc1* соответствует реальной фазе принимаемого сигнала.
После измерения на частоте f1 аналогично измеряется фаза принимаемого сигнала ϕ2*=ϕc2* ϕnc2* на частоте f2.
Измерения ϕ1*, ϕ2* корректируются поправками на время распространения сигналов f1, f2 от передающего пункта до приемного и определяется сдвиг между сигналами времени передающего и приемного пунктов по вышеприведенной формуле для τ.
Результат измерения τ, определяемый с погрешностью σ(τ) и неоднозначностью  , уточняется по фазе ϕ1* или ϕ2* сигнала частоты f1или f2.
, уточняется по фазе ϕ1* или ϕ2* сигнала частоты f1или f2.
Запишем погрешности оценки фазы каждой из частот:
σ ( ϕ1* ) f1 σ ( t ) σ ( ϕ2* ) f2 σ ( t )
При близких значениях f1 и f2 можно положить
σ ( ϕ1* ) σ ( ϕ2* ) ≈ fo σ (t), где fo=  средняя частота;
средняя частота;
σ (t) временная погрешность измерения фазы сигнала высокой частоты.
В прототипе измерения ϕ1*, ϕ2* выполняются последовательно, поэтому они независимы. Погрешность измерения сдвига τ равна
σ(τ) 

 σ(t)
σ(t)  Kσ(t) где K
Kσ(t) где K  коэффициент перехода.
коэффициент перехода.
Отсюда следует, что погрешность σ ( τ ) измерения сдвига τ превышает погрешность σ (t) точного (многозначного) измерения на высокой частоте f1 или f2 в  K раз.
K раз.
Для однозначного перехода от фазы сигнала разностной частоты f2 f1 к отсчету по несущей частоте f1 (сопряжение грубого и точного измерений) с вероятностью 0,95 погрешность измерения σ ( τ ) на разностной частоте f2 f1 должна быть не более 0,25 периода частоты f1. Положим, например, f1 20,0 кГц, f2 20,1 кГц, тогда f2 f1 100 Гц, Т1 50 мкс, и σ ( τ ) при измерении по сигналу разностной частоты 100 Гц не должна превышать 0,25 ˙ 50 12,5 мкс. Коэффициент перехода K
50 мкс, и σ ( τ ) при измерении по сигналу разностной частоты 100 Гц не должна превышать 0,25 ˙ 50 12,5 мкс. Коэффициент перехода K  200. Отсюда следует, что временная погрешность измерений σ (t) по сигналам несущих частот f1 и f2 не должна превышать величины
200. Отсюда следует, что временная погрешность измерений σ (t) по сигналам несущих частот f1 и f2 не должна превышать величины
σ(t) 
 0,044 мкс
0,044 мкс
Очевидно, что реализация такой точности измерения технически затруднительна. При больших погрешностях σ (t) уменьшается вероятность правильного разрешения многозначности фазовых измерений, что приводит к погрешности привязки в один или несколько периодов высокой частоты. В рассмотренном примере погрешность привязки при неправильном разрешении многозначности может составить 50, 100, 150 (и т.д.) мкс.
Целью изобретения является повышение вероятности разрешения многозначности фазовых измерений по частотно-манипулированному сигналу.
Для достижения цели в устройство для привязки шкал времени, содержащее последовательно соединенные задающий генератор и хранитель времени, первый выход которого соединен с установочным входом формирователя пилот-сигнала, а также измеритель временных интервалов, радиоприемник, приемную антенну и блок анализа, к опросному входу которого подключен второй выход хранителя времени, а выход соединен с управляющим входом коммутатора режима, введены блок коммутации, гетеродин, преобразователь частоты, блок дискретной регулировки сдвига, формирователь сигнала установки, формирователь нижней частоты, формирователь верхней частоты, первый перемножитель сигналов, второй перемножитель сигналов, блок суммирования, блок вычитания, первый и второй интеграторы, первый и второй фазовращатели, причем сигнальный вход второго фазовращателя соединен с выходом задающего генератора и сигнальными входами формирователя пилот-сигнала и первого фазовращателя, выход которого соединен с сигнальными входами формирователя нижней частоты, формирователя верхней частоты и блока дискретной регулировки сдвига, выход формирователя нижней частоты соединен с входом первого перемножителя сигналов, выход которого соединен с первыми входами блока вычитания и блока суммирования, выход которого подключен через первый интегратор к управляющему входу первого фазовращателя, выход блока дискретной регулировки сдвига через формирователь сигнала установки подключен к стоповому входу измерителя временных интервалов и установочным входам формирователя нижней частоты и формирователя верхней частоты, выход которого соединен с входом второго перемножителя сигналов, выход которого соединен с вторыми входами блока суммирования и блока вычитания, выход которого через второй интегратор соединен с сигнальным входом блока анализа, с установочным входом которого соединен третий выход хранителя времени, выход второго интегратора дополнительно соединен с сигнальным входом коммутатора режима, первый и второй выходы которого соединены соответственно с управляющими входами блока дискретной регулировки сдвига и второго фазовращателя, выход которого соединен с входом гетеродина, выход которого соединен с преобразователем частоты, сигнальный вход которого соединен с выходом радиоприемника, а выход с вторыми входами первого и второго перемножителей сигналов, первый выход хранителя времени дополнительно соединен со стартовым входом измерителя временных интервалов, выход формирователя пилот-сигнала соединен с входом блока коммутации, к второму входу которого подключена приемная антенна, а выход блока коммутации соединен с входом радиоприемника.
Цель достигается также тем, что блок анализа выполнен в виде последовательно соединенных третьего интегратора, сигнальный вход которого соединен с сигнальным входом блока анализа, и управляющего элемента, а также блока задержки и ключа, причем выход третьего интегратора дополнительно соединен с управляющим входом ключа, сигнальный вход которого и вход блока задержки соединены с опросным входом блока анализа, а выход ключа с вторым входом управляющего элемента, установочный вход которого соединен с установочным входом блока анализа, а выход блока задержки соединен с установочным входом третьего интегратора.
В отличие от прототипа в устройстве нет каналов раздельного (независимого) измерения фазы сигналов нижней и верхней частоты, что приводит в прототипе к возрастанию погрешности измерения фазы сигнала разностной частоты и уменьшению вероятности разрешения многозначности фазовых (точных) измерений.
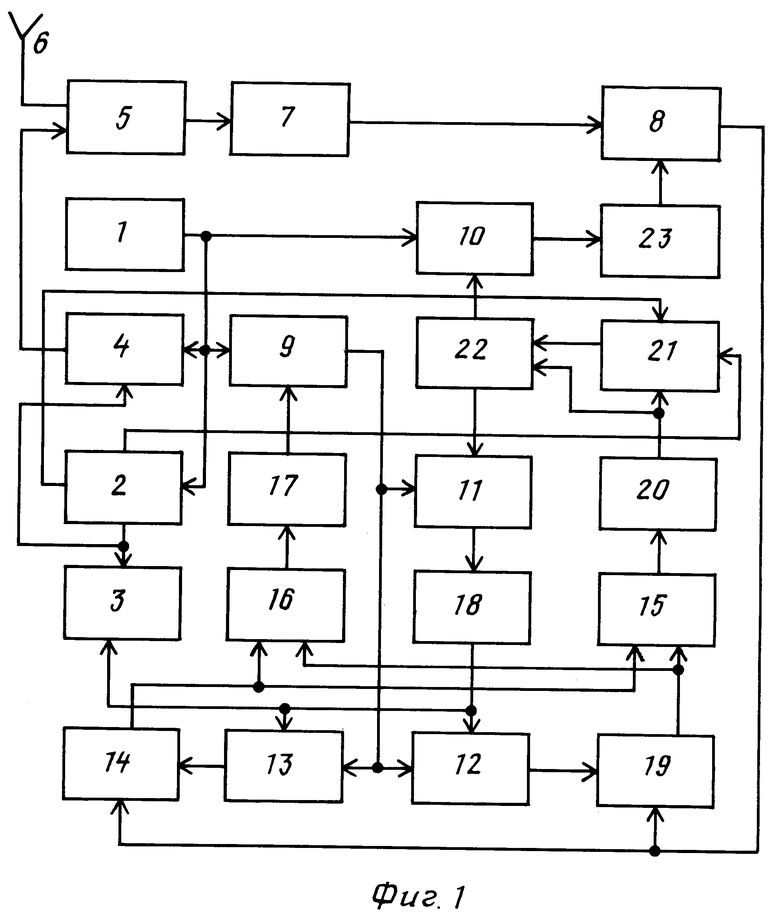
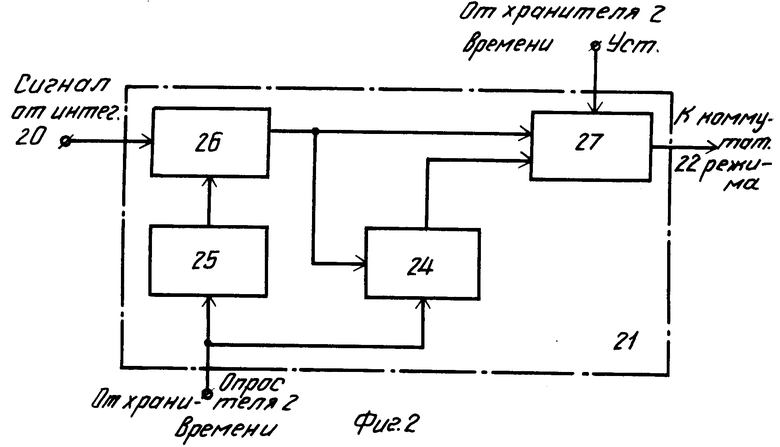
На фиг. 1 дана структурная электрическая схема предлагаемого устройства; на фиг. 2 структурная электрическая схема блока анализа; на фиг. 3 взаимные корреляционные функции преобразованного ЧМ сигнала и суммы ϑc ( τ ϕ) и разности ϑp ( τ ϕ) измерительных сигналов при произвольной фазе гетеродина; на фиг. 4 то же, при подстроенной фазе гетеродина.
Устройство для привязки шкал времени содержит последовательно соединенные задающий генератор 1 и хранитель 2 времени, выход которого соединен со стартовым входом измерителя 3 временных интервалов и установочным входом формирователя 4 пилот-сигнала. Выход формирователя 4 пилот-сигнала соединен с входом блока 5 коммутации, к второму входу которого подключена приемная антенна 6. Выход блока 5 коммутации соединен с входом радиоприемника 7, выход которого подключен к сигнальному входу преобразователя 8 частоты. Выход задающего генератора 1 соединен также с сигнальными входами формирователя 4 пилот-сигнала, первого фазовращателя 9 и второго фазовращателя 10. Выход первого фазовращателя 9 соединен с сигнальными входами блока 11 дискретной регулировки сдвига, формирователя 12 верхней частоты и формирователя 13 нижней частоты, выход которого соединен с входом первого перемножителя 14 сигналов. Выход перемножителя 14 сигналов соединен с первыми входами блока 15 вычитания и блока 16 суммирования, выход которого подключен через первый интегратор 17 к управляющему входу первого фазовращателя 9. Выход блока 11 дискретной регулировки сдвига подключен через формирователь 18 сигнала установки к стоповому входу измерителя 3 временных интервалов и установочным входам формирователя 13 нижней частоты и формирователя 12 верхней частоты, выход которого соединен с вторым перемножителем 19 сигналов. Выход перемножителя 19 соединен с вторыми входами блока 16 суммирования и блока 15 вычитания, выход которого подключен через второй интегратор 20 к сигнальным входам блока 21 анализа и коммутатора 22 режима. К опросному входу блока 21 анализа подключен второй выход хранителя 2 времени, а к установочному входу блока 21 анализа подключен третий выход хранителя 2 времени. Выход блока 21 анализа соединен с управляющим входом коммутатора 22 режима, первый выход которого соединен с управляющим входом блока 11 дискретной регулировки сдвига, а второй выход коммутатора 22 режима соединен с управляющим входом второго фазовращателя 10. Выход фазовращателя 10 нагружен на вход гетеродина 23, выход которого соединен с гетеродинным входом преобразователя 8 частоты, выход которого соединен с вторыми входами первого 14 и второго 19 перемножителей сигналов.
Блок 21 анализа содержит ключ 24, сигнальный вход которого подключен непосредственно и через блок 25 задержки соответственно к опросному входу блока анализа и установочному входу третьего интегратора 26. Сигнальный вход интегратора 26 соединен с сигнальным входом блока анализа, а выход интегратора 26 подключен к управляющему входу ключа 24, нагруженного на первый вход управляющего элемента 27, и второму входу управляющего элемента 27, выход которого соединен с выходом блока анализа, установочный вход которого соединен с установочным входом управляющего элемента 27.
Устройство работает следующим образом.
Сигнал задающего генератора 1 поступает на формирователь 4 пилот-сигнала, где формируется частотно-манипулированный (ЧМ) сигнал, образованный переключением частот f1 и f2. Моменты переключения задаются импульсами хранителя 2 времени, сформированными из частоты задающего генератора 1 и образующими шкалу времени приемного пункта. Фазы переключаемых сигналов равны нулю. Пилот-сигнал поступает через блок 5 коммутации на вход радиоприемника 7, настроенного на среднюю частоту ЧМ сигнала fo. После смещения с частотой гетеродина 23 в преобразователе 8 частоты преобразованный ЧМ сигнал поступает на входы перемножителей 14, 19 сигналов. На другие входы перемножителей 14, 19 поступают непрерывные измерительные сигналы U1, U2 с формирователей нижней 13 и верхней 12 частоты. Частоты измерительных сигналов равны нижней fн и верхней fвчастоте преобразованного в область более низких частот сигнала.
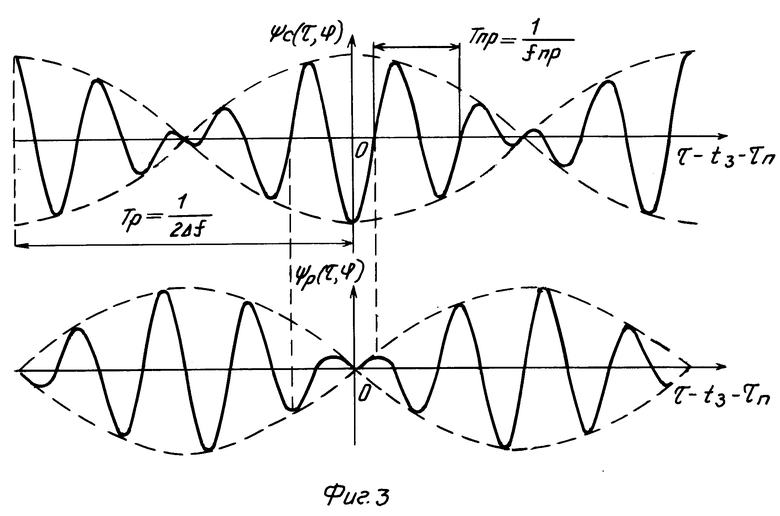
Измерительные сигналы и сигнал гетеродина формируются из частоты задающего генератора 1, поступающей на формирователи 12, 13 и гетеродин 23 соответственно через фазовращатели 9 и 10. Сигнал с фазовращателя 9 поступает также через блок 11 дискретной регулировки сдвига на формирователь 18 сигналов установки, выходной сигнал которого поступает на установочные входы формирователей 12, 13. Период выходного сигнала Δ f формирователя 18 кратен периодам колебаний fн, fв, поэтому фазы измерительных сигналов привязаны к фронту сигнала установки. Сигналы с перемножителей 14, 19 поступают на блоки суммирования 16 и вычитания 15, с выходов которых сигналы поступают соответственно на интеграторы 17 и 20. На выходе интегратора 17 образуется взаимная корреляционная функция (ВКФ) ЧМ сигнала и суммы U1 + U2 измерительных сигналов, а на выходе интегратора 20 образуется ВКФ ЧМ сигнала и разности U1 U2 тех же сигналов. Выходные сигналы Ψc ( τ ϕ ) ϑp ( τ ϕ) (фиг. 3) интеграторов 17, 20 есть высокочастотные функции сдвига τ ЧМ сигнала и измерительных сигналов и фазы ϕ выходного сигнала преобразователя 8 частоты. Частоты наполнения и огибающих этих функций равны соответственно промежуточной частоте fпр и половине разностной частоты Δ f
и половине разностной частоты Δ f  Ψc ( τ ϕ ) и ϑp ( τ ϕ) используются в качестве сигналов рассогласования, управляющих положением измерительных сигналов и результирующей фазой преобразованного сигнала.
Ψc ( τ ϕ ) и ϑp ( τ ϕ) используются в качестве сигналов рассогласования, управляющих положением измерительных сигналов и результирующей фазой преобразованного сигнала.
Под действием сигнала Ψc ( τ ϕ ) интегратора 17 выходные сигналы формирователей 18, 12, 13 устанавливаются с помощью общего фазовращателя 9 в одно из положений, соответствующих нулю функции Ψc ( τ ϕ ), следующих с периодом Тпр . Значение Ψp ( τ ϕ ), которое формируется при этом в разностном канале на выходе интегратора 20, не равно нулю. Сигнал рассогласования с интегратора 20 поступает на входы блока 21 анализа и коммутатора 22 режима. При расстройке измерительных сигналов относительно положения равновесия сигнал рассогласования имеет постоянный знак положительный или отрицательный в зависимости от сдвига. В результате анализа выход интегратора 20 подключается коммутатором 22 режима к управляющему входу блока 11 дискретной регулировки сдвига. Под действием команд интегратора 20 сигнал Δ f и синхронизированные им измерительные сигналы U1, U2 сдвигаются к положению равновесия дискретами 1/fпр, что значительно сокращает время отработки начального рассогласования и не приводит к сбоям в цепи слежения, управляемой интегратором 17. Промежуточное положение, в которое устанавливается фронт сигнала Δ f и сигналы U1, U2, не является однозначным из-за колебательного характера Ψc ( τ ϕ ). Неоднозначность точного измерения выражается в колебаниях сигнала Δ f около положения равновесия (максимума огибающей Ψc ( τ ϕ ), фиг. 3) с дискретом 1/fприз-за несовпадения максимума огибающей и нуля наполнения ВКФ при произвольной фазе гетеродина (фиг. 3).
. Значение Ψp ( τ ϕ ), которое формируется при этом в разностном канале на выходе интегратора 20, не равно нулю. Сигнал рассогласования с интегратора 20 поступает на входы блока 21 анализа и коммутатора 22 режима. При расстройке измерительных сигналов относительно положения равновесия сигнал рассогласования имеет постоянный знак положительный или отрицательный в зависимости от сдвига. В результате анализа выход интегратора 20 подключается коммутатором 22 режима к управляющему входу блока 11 дискретной регулировки сдвига. Под действием команд интегратора 20 сигнал Δ f и синхронизированные им измерительные сигналы U1, U2 сдвигаются к положению равновесия дискретами 1/fпр, что значительно сокращает время отработки начального рассогласования и не приводит к сбоям в цепи слежения, управляемой интегратором 17. Промежуточное положение, в которое устанавливается фронт сигнала Δ f и сигналы U1, U2, не является однозначным из-за колебательного характера Ψc ( τ ϕ ). Неоднозначность точного измерения выражается в колебаниях сигнала Δ f около положения равновесия (максимума огибающей Ψc ( τ ϕ ), фиг. 3) с дискретом 1/fприз-за несовпадения максимума огибающей и нуля наполнения ВКФ при произвольной фазе гетеродина (фиг. 3).
Для устранения многозначности точных отсчетов выход интегратора 20 подключается коммутатором 22 режима к управляющему входу фазовращателя 10 в цепи управления фазой гетеродина. Переключение осуществляется по сигналу блока 21 анализа, на входе которого количество сигналов противоположного знака за период опросных импульсов при флюктуациях Δf около положения равновесия примерно уравнивается. При изменении фазы гетеродина наполнение ВКФ опорного и измерительных сигналов смещается относительно огибающих этих функций. Возникшее рассогласование измерительных сигналов в первой цепи отрабатывается подачей команд с интегратора 17 в фазовращатель 9. Устойчивость цепей автоподстройки при одновременной работе обеспечивается различной крутизной сигналов рассогласования в цепях слежения за сигналом промежуточной и разностной частоты ЧМ сигнала. Крутизна дискриминационной характеристики Ψc ( τ ϕ ) при изменении Ψp ( τ ϕ ) в процессе подстройки τ равна  , поэтому все изменения фазы преобразованного сигнала на выходе преобразователя 8 частоты отрабатываются в канале изменения сдвига измерительных сигналов с помощью фазовращателя 9 практически мгновенно по сравнению с временем отработки канала управления фазой.
, поэтому все изменения фазы преобразованного сигнала на выходе преобразователя 8 частоты отрабатываются в канале изменения сдвига измерительных сигналов с помощью фазовращателя 9 практически мгновенно по сравнению с временем отработки канала управления фазой.
При пилотировании после достижения равновесия в цепях автоподстройки и окончания воздействия управляющих сигналов на фазу гетеродина 23 выход интегратора 20 повторно подключается коммутатором 22 режима к блоку 11 дискретной регулировки сдвига. Переключение осуществляется подачей сигнала с третьего выхода хранителя 2 времени на установочный вход блока 21 анализа. На измерителе 3 временных интервалов фиксируется результат пилотирования τn между импульсами хранителя 2 времени (старт) и фронтами сигнала Δ f (стоп), равный задержке сигнала разностной частоты в приемоизмерительном тракте.
При поступлении ЧМ сигнала с антенны 6 через блок 5 коммутации на вход радиоприемника 7 производится точная подстройка измерительных сигналов по фазе сигнала, поступающего с преобразователя 8 частоты, с неоднозначностью Тпр . По окончании автоподстройки и при флюктуациях выходного сигнала Δ f формирователя 18 около положения равновесия с дискретом
. По окончании автоподстройки и при флюктуациях выходного сигнала Δ f формирователя 18 около положения равновесия с дискретом  на измерителе 3 временных интервалов фиксируется один из двух результатов точного измерения τ1c по сигналу, после чего выход интегратора 20 коммутируется на управляющий вход фазовращателя 10.
на измерителе 3 временных интервалов фиксируется один из двух результатов точного измерения τ1c по сигналу, после чего выход интегратора 20 коммутируется на управляющий вход фазовращателя 10.
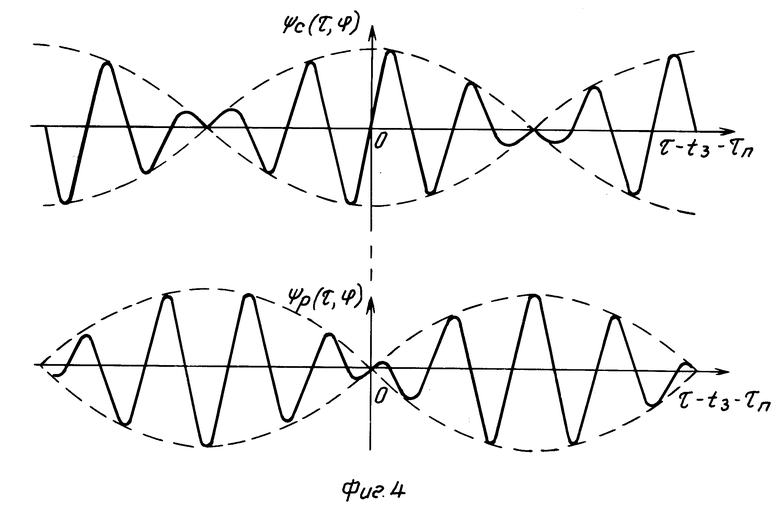
Дальнейшая работа устройства заключается в подстройке разностного измерительного сигнала U1 U2 во втором канале путем воздействия на фазу гетеродина аналогично тому, как это имеет место при пилотировании, с тем отличием, что выход интегратора 20 на управляющий вход блока 11 по окончании отработки не переключается. После достижения нулевой фазы ϑc ( τ ϕ ) и ϑp ( τ ϕ) (фиг. 4) и равновесия следящих систем производится измерение τ2c положения выходного сигнала формирователя 18 относительно импульсов хранителя 2 времени на измерителе 3 временных интервалов.
Блок 21 анализа работает следующим образом.
При больших расстройках подстраиваемого сигнала относительно равновесного положения знак сигнала рассогласования на сигнальном входе интегратора 26 не меняется за период следования импульсов опроса, поступающих на сигнальный вход ключа 24 и блок 25 задержки. На выходе интегратора 26 появляется сигнал переполнения соответствующего знака, который запирает ключ 24 по управляющему входу, при этом последующий опросный импульс на первый вход управляющего элемента 27 не проходит. Одновременно сигнал интегратора 26 поступает на второй вход управляющего элемента 27 и удерживает его в первом состоянии.
Ближайший импульс опроса проходит через блок 25 задержки и устанавливает интегратор 26 в (нулевое) состояние, при котором ключ 24 открывается. Если до прихода следующего импульса опроса интегратор 26 переполнится, ключ 24 закроется и состояние схемы повторится. При подходе подстраиваемого колебания к положению равновесия и флюктуациях вокруг него количество сигналов противоположного знака на сигнальном входе интегратора 26 за период опросных импульсов примерно уравнивается, так что интегратор за период обнуления не переполняется и ключ 24 остается открытым для опросных импульсов. Сигнал с выхода интегратора 26, устанавливающий управляющий элемент 27 в первое состояние, снимается, и на второй вход элемента 27 проходят через открытый ключ 24 импульсы опроса, устанавливающие элемент 27 в инверсное состояние.
При выходе системы слежения из равновесия возрастает количество сигналов на входе интегратора 26 одного знака и процесс повторяется. При поступлении управляющего сигнала на установочный вход блока анализа управляющий элемент 27 возвращается в первое состояние.
Алгоритм разрешения многозначности точных измерений задержки t3сигнала относительно импульсов хранителя времени с учетом отработки сигнала Δ f в область перехода с частоты на частоту состоит в следующем.
Последовательно вычисляется следующее.
Разность отсчетов по сигналу и пилот-сигналу в режиме точных (многозначных) измерений
t31= τ1c-τп± 
При t31 < 0 к полученной разности при- бавляется 2Тр, где Тр .
.
Фаза сигнала промежуточной частоты fпр, т.е. дробная часть числа периодов промежуточной частоты на интервале t31
ϕпр* fпр (t31 rTпр), где r целое число.
Разность отсчетов по сигналу и пилот-сигналу в режиме измерения фазы сигнала разностной частоты
t32 τ2c τn При t32 < 0 к полученной разности прибавляется 2Тр.
Количество периодов средней (высокой) частоты fo на интервале t32
Ф* fot32 K ϕp*, где К  коэффициент перехода;
коэффициент перехода;
ϕp* 2 Δ ft32 фаза сигнала разностной частоты.
Величины ϕпр*, Ф* корректируются поправками на распространение радиоволн:
ϕ
Фк* Ф* k(ϕ2p* ϕ1p*), где ϕ1p* ϕ2p* фазовые набеги сигналов с частотами f1, f2.
После ввода поправок определяется уточненное количество периодов частоты fo ЧМ сигнала на скорректированном интервале tз2 с учетом результата точного измерения ϕk*
ε Е (Фк*) + ϕk*
Сопряжение выполняется по правилам устранения многозначности в многошкальных системах:
/ε Фк /< 0,5.
Окончательно искомая величина tз по результатам двух измерений определяется следующим образом:
t3=  E
E +D
+D To
To
Е и D обозначают операции вычисления соответственно целой и дробной части; τpТр( ϕ2p* ϕ1p*) задержка сигнала разностной частоты при распространении;
τпр= Tпр то же, для средней частоты ЧМ сигнала в пересчете на промежуточную частоту; То
то же, для средней частоты ЧМ сигнала в пересчете на промежуточную частоту; То период средней (высокой) частоты ЧМ сигнала на входе радиоприемника. Найденная величина tз есть искомый результат привязки шкалы времени приемного пункта.
период средней (высокой) частоты ЧМ сигнала на входе радиоприемника. Найденная величина tз есть искомый результат привязки шкалы времени приемного пункта.
Запишем аналитические выражения, поясняющие процессы в устройстве, приведенном на фиг. 1.
Частотно-манипулированный сигнал на выходе преобразователя 8 частоты имеет вид:
U(t3, ϕ) 


где tз искомая задержка сигнала (сдвиг) относительно импульсов хранителя 2 времени; ϕн, ϕв результирующие фазы колебаний преобразованного по частоте сигнала с угловыми частотами ωн ωв ϕ фаза гетеродина; Т длительность элементарной посылки ЧМ сигнала. Очевидно, что фаза сигнала i-й частоты в радианах ϕi 2 π ϕi*, где ϕi* фаза сигнала i-й частоты в долях цикла (периода) этой частоты.
Взаимная корреляционная функция (ВКФ) сигнала (1) и суммы измерительных сигналов формирователей нижней 13 и верхней 12 частоты
Uc(τ) U1 + U2 cos ωн (t τ) + cos ωв (t τ) определяется выражением U
U , ϕ)dt 0,5 cos
, ϕ)dt 0,5 cos  (τ-t3)+
(τ-t3)+  (2)
(2)
Функция (2) высокочастотная (см. фиг. 3). Частоты наполнения и огибающей равны соответственно средней частоте преобразования ωпр и половине разностной частоты Δ ω.
При использовании выходного сигнала (2) ϑc ( τ ϕ ) интегратора 17 в качестве сигнала рассогласования для автоматической подстройки Uc(τ) положение измерительных сигналов по окончании автоподстройки не является однозначным из-за колебательного характера функции ϑc ( τ ϕ ).
Для устранения многозначности путем воздействия на среднюю фазу сигнала ϕ в интеграторе 20 образуется еще одна ВКФ между преобразованным сигналом (1) и разностью измерительных сигналов
Uр( τ) U1 U2 cos ωн (t τ) cosωв (t τ)
Соответствующая ВКФ имеет вид: U
U , ϕ)dt 0,5 sin
, ϕ)dt 0,5 sin  (τ-t3)+
(τ-t3)+  (3)
(3)
Решая систему уравнений относительно τ и ϕ с учетом устойчивости работы цепей автоподстройки, найдем условия, при которых сигналы рассогласования на выходах интеграторов 17, 20 равны нулю:
относительно τ и ϕ с учетом устойчивости работы цепей автоподстройки, найдем условия, при которых сигналы рассогласования на выходах интеграторов 17, 20 равны нулю:
τ t3-  ,
,
ϕ  (ϕВ-ϕН) +
(ϕВ-ϕН) +  (4)
(4)
Наличие решения (4) показывает, что существует положение устойчивого равновесия, в которое устанавливается система выходных сигналов формирователей 18, 13, 12 в процессе управления сдвигом τ и фазой ϕ с помощью фазовращателей 9 и 10.
На первом этапе подстройки измерительных сигналов (выходных сигналов блоков 18, 13, 12) по фазе сигнала промежуточной частоты ωпрвыходы интегратора 20 подключаются с помощью коммутатора 22 режима к управляющему входу блока 11 дискретной регулировки сдвига. Равновесие первой цепи автоподстройки, включающей блок суммирования 16, интегратор 17 и фазовращатель 9, имеет место при равенстве функции ϑc ( τ ϕ ), формируемой в этой цепи, нулю. Решениями уравнения ϑc ( τ ϕ )0 являются значения
τпр= t3- 
 +
+  n 0, ± 1, ± 2, При этих значениях τ выходной сигнал ϑp ( τ ϕ ) интегратора 20 не равен нулю. Под воздействием команд на управляющих входах блока 11 синхронизированные сигналы на выходах формирователей 18, 13, 12 сдвигаются дискретами
n 0, ± 1, ± 2, При этих значениях τ выходной сигнал ϑp ( τ ϕ ) интегратора 20 не равен нулю. Под воздействием команд на управляющих входах блока 11 синхронизированные сигналы на выходах формирователей 18, 13, 12 сдвигаются дискретами  , что сокращает время отработки рассогласования и не приводит к сбоям в первой цепи. По окончании автоподстройки в обоих каналах результат измерения равен
, что сокращает время отработки рассогласования и не приводит к сбоям в первой цепи. По окончании автоподстройки в обоих каналах результат измерения равен
τ1= t3- 
 ±
± 
По результату точного измерения вычисляется
t31= τ1+  +
+  ±
±  (5)
(5)
После начала флюктуаций выходного сигнала формирователя 18 около положения равновесия с дискретом 1/fпр (см. фиг. 3) выходы интегратора 20 переключаются с помощью коммутатора 22 режима к управляющим входам фазовращателя 10 для управления фазой сигнала ϕ путем воздействия на фазу гетеродина 23. Как следует из выражений (2) и (3), при изменении ϕ наполнение ВКФ ϑc ( τ ϕ ) и ϑp ( τ ϕ ) смещается относительно огибающих ВКФ, при этом первая следящая система, в которой осуществляется слежение за "нулями" наполнения ВКФ, непрерывно отрабатывает возникающее рассогласование. Крутизна дискриминационной характеристики первого канала превышает в  раз крутизну дискриминационной характеристики второго канала, включающего блок вычитания 15, интегратор 20 и фазовращатель 10 и отрабатывающего по сигналу частоты Δ ω. За счет большого различия в крутизне отработка канала слежения за сигналом промежуточной частоты ωпр происходит практически мгновенно при изменении фазы ϕ сигнала, поэтому обе следящие системы работают устойчиво.
раз крутизну дискриминационной характеристики второго канала, включающего блок вычитания 15, интегратор 20 и фазовращатель 10 и отрабатывающего по сигналу частоты Δ ω. За счет большого различия в крутизне отработка канала слежения за сигналом промежуточной частоты ωпр происходит практически мгновенно при изменении фазы ϕ сигнала, поэтому обе следящие системы работают устойчиво.
По окончании автоподстройки ϑc ( τ ϕ ) и ϑp ( τ ϕ ) принимают вид, изображенный на фиг. 4, при этом отсчет τ2 и фаза сигнала ϕ определяются выражениями (4). Эквивалентная задержка приемоизмерительного тракта, измеряемая с помощью пилот-сигнала, синхронизированного импульсами хранителя 2 времени, определяется из первого выражения (4) при tз 0:
τп= 
Искомая задержка вычисляется по результату τ2c измерения фазы сигнала разностной частоты (грубое измерение) в соответствии с (4) в виде:
tз2 τ2c τn (6)
Из (4) следует, что в равновесии +
+ 
 τп
τп
Подставив эту сумму в (5), получим
tз1= τ1c-τп±  (7)
(7)
Алгоритм сопряжения результатов точного tз1 (многозначного) и грубого tз2 (однозначного в пределах периода разностной частоты) измерения искомой задержки tз принимаемого сигнала относительно импульсов хранителя 2 времени приведен выше.
Устройство реализуется следующим образом.
Задающий генератор 1 высокостабильный источник колебаний. Хранитель 2 времени резервированный делитель частоты выдающий на выходе импульсную последовательность шкалу времени приемного пункта. Измеритель 3 временных интервалов старт-стопное измерительное устройство (частотомер типа ЧЗ-54) в режиме измерения интервала времени.
Формирователь 4 пилот-сигнала источник двух когерентных колебаний с частотами f1 и f2, переключаемыми меандровым сигналом с выхода хранителя времени. Блок 5 коммутации переключатель или высокочастотное реле типа РЭВ 15. Приемная антенна 6 рамочная антенна или штырь.
Радиоприемник 7 супергетеродинный приемник СДВ диапазона, применяемый в системах единого времени. Преобразователь 8 частоты балансный смеситель частоты с усилителем-ограничителем на выходе для формирования преобразованного сигнала в виде меандра. Фазовращатели 9, 10 устройства для дискретной регулировки фазы по а.с. СССР N 1013871, кл. G 01 R 25/00, 1983.
Блок 11 дискретной регулировки сдвига управляемый делитель частоты. Непосредственно блок управления выполнен в виде устройства для дискретной регулировки фазы по а.с. СССР N 1013871.
Формирователи 12, 13 верхней и нижней частоты устройства, содержащие стандартные преобразователи и делители частоты.
Перемножители 14, 19 сигналов сумматоры по модулю 2, на выходах которых образуются участки совпадения С или несовпадения Н полярностей перемножаемых сигналов.
Блоки 15 и 16 суммирования и вычитаний устройства, содержащие двухтактные генераторы счетных импульсов, схемы ИЛИ и ключи, управляемые сигналами совпадений и несовпадений с перемножителей сигналов. На сигнальные входы ключей поступают высокочастотные импульсы с выходов двухтактного генератора счетных импульсов, которые заполняют участки совпадения и несовпадения перемножаемых сигналов. Таким образом, ключи выполняют функцию преобразователей интервал число импульсов. Сложение импульсных последовательностей происходит на схемах ИЛИ. При сложении U1 + U2 образуются суммы С1 + С2 и Н1 + Н2, а при вычитании U1- U2 суммы С1 + Н2 и С2 + Н1. Индексами С1, Н1 и С2, Н2 обозначены сигналы, относящиеся к первой и второй цепям. Сложение реализуется достаточно просто при использовании двухтактной последовательности счетных импульсов (сдвинутых относительно друг друга), причем на первую цепь поступает такт 1, а на вторую такт 2.
Интеграторы 17, 20, 26 реверсивные счетчики типа ИЕ7 (см. В.Л. Шило. Популярные цифровые микросхемы. М. Радио и связь, 1987, с. 90).
Формирователь 18 сигналов установки делитель частоты с формирователем коротких импульсов на выходе.
Коммутатор 22 режима ключ на элементах И-НЕ (см. книгу В.Л. Шило, с. 40), управляемый логическими сигналами с выхода блока анализа.
Гетеродин 23 генератор вспомогательного сигнала, выполненный на основе смесителей и делителей частоты выходного сигнала фазовращателя 10. Ключ 24 выполнен на элементах И. Блок 25 задержки выполнен на D-триггере. Управляющий элемент 27 выполнен на IK-триггере.
Поскольку при корреляционных измерениях оценки ϕ1* и ϕ2* не являются независимыми, а жестко связаны между собой, возрастания σ (t) в  К раз не происходит. Уменьшение погрешности измерения фазы сигнала разностной частоты приводит к возрастанию вероятности разрешения многозначности точных (фазовых) измерений.
К раз не происходит. Уменьшение погрешности измерения фазы сигнала разностной частоты приводит к возрастанию вероятности разрешения многозначности точных (фазовых) измерений.
Устройство испытано в лабораторных условиях при работе в шумах.
Средняя частота входного ЧМ сигнала fo 20 кГц (период То 50 мкс), сдвиг частоты f2 f1 0,1 кГц.
50 мкс), сдвиг частоты f2 f1 0,1 кГц.
Коэффициент перехода К 
 200. Средняя частота преобразованного сигнала на выходе преобразователя 8 частоты равна fпр 2 кГц. Нижняя и верхняя частоты преобразованного сигнала fн 1,95 кГц и fв 2,05 кГц. Частоты измерительных сигналов fн=1,95 кГц и fв=2,05 кГц на выходах формирователей 13 и 12 и частота сигнала Δ f 50 Гц на выходе формирователя 18 получены делением исходной частоты 6,396 МГц задающего генератора 1 соответственно на 3280, 3120 и 127920. Во всех трех каналах деления делитель на 10 является общим. Он является управляемым и выполняет функции фазовращателя 9.
200. Средняя частота преобразованного сигнала на выходе преобразователя 8 частоты равна fпр 2 кГц. Нижняя и верхняя частоты преобразованного сигнала fн 1,95 кГц и fв 2,05 кГц. Частоты измерительных сигналов fн=1,95 кГц и fв=2,05 кГц на выходах формирователей 13 и 12 и частота сигнала Δ f 50 Гц на выходе формирователя 18 получены делением исходной частоты 6,396 МГц задающего генератора 1 соответственно на 3280, 3120 и 127920. Во всех трех каналах деления делитель на 10 является общим. Он является управляемым и выполняет функции фазовращателя 9.
Испытания проведены при соотношении шум/сигнал  0,8 в полосе приемника 250 Гц.
0,8 в полосе приемника 250 Гц.
Получены следующие погрешности точного и грубого измерений:
σ (t) 0,195 мкс
σ(τ) 10,85 мкс.
Среднеквадратические погрешности рассчитаны по результатам 30 измерений. Величина σ(τ) 10,85 мкс не превышает четверти периода средней частоты входного сигнала 12,5 мкс, поэтому во всех 30 измерениях имело место правильное разрешение многозначности фазовых (точных) измерений в пределах периода разностной частоты T  10 мс.10 мс.
10 мс.10 мс.
В этих же пределах находятся контрольные задержки (сдвиги) ЧМ сигнала на входе приемника относительно импульсов хранителя времени.
Таким образом, погрешность измерения сдвигов (погрешность привязки) σ (t) 0,195 мкс.
Использование: в системах единого времени для синхронизации разнесенных часов по радиоканалу. Сущность изобретения: устройство содержит блок коммутации, радиоприемник, преобразователь частоты, задающий генератор, гетеродин, формирователь пилот-сигнала, коммутатор режима, блок анализа, хранитель времени, блок дискретной регулировки сдвига, измеритель временных интервалов, блок суммирования, формирователь сигнала установки, блок вычитания, формирователь нижней частоты и формирователь верхней частоты, два фазовращателя, два интегратора, два перемножителя сигналов. 4 ил.
со вторым входом управляющего элемента, установочный вход которого соединен с установочным входом блока анализа, а выход блока задержки соединен с установочным входом третьего интегратора.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для долговременного сличения частот высокостабильных генераторов по радиосигналам | 1976 |
|
SU691770A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
