Изобретение относится к двигателестроению, преимущественно к силовым установкам для транспортных машин, в частности, с поршневыми двигателями внутреннего сгорания.
Известен двигатель, представляющий собой бесшатунный механизм, содержащий два кривошипа, на которых жестко насажены вращающиеся шестерни с радиусом начальной окружности, равным одной четверти хода поршней, а также пара неподвижных шестерен внутреннего зацепления с радиусом начальной окружности, равным половине хода поршней, при этом вращающиеся шестерни установлены с возможностью взаимодействия с неподвижными шестернями. С целью повышения долговечности и уменьшения габаритов механизм снабжен опорой и установленным в ней дополнительным коленом, шарнирно связывающим вращающиеся шестерни между собой с возможностью перемещения последних в противофазе [1] .
Недостатком механизма является то, что он содержит два кривошипа и дополнительное колено, шарнирно связывающее вращающиеся шестерни. Вследствие этого подвижное звено, соединяющее шарнирно поршень с кривошипом, будет оказывать одностороннее боковое реактивное воздействие на поршень, рубашка цилиндра будет изнашиваться неравномерно, образуя в сечении цилиндра вместо окружности эллипс, большая ось которого будет располагаться в плоскости движения соединительного звена и кривошипа. Кроме того механизм, как и все кривошипно-ползунные механизмы, обладает одним крупным недостатком: в период установления кривошипа по оси движения ползуна крутящий момент на коленчатый вал не передается, что является причиной низкого его КПД, появления вибраций с частотой вращения коленчатого вала, неравномерных динамических нагрузок и т. д.
Наиболее близким по технической сущности и достигаемому результату является двигатель внутреннего сгорания, содержащий корпус с цилиндрами, поршни со штоками, равноплечие коромысла, соединенные со штоками общими шарнирами и с выходным валом через первый и второй планетарные механизмы, имеющие колесо внутреннего зацепления, свободное водило, центральную шестерню и два сателлита, механизм ограничения и регулирования хода поршня, выполненный в виде наружного и внутреннего эксцентриков и шатуна, соединенного подвижно с общим шарниром одного из штоков и с наружным эксцентриком. С целью повышения надежности работы и эксплуатационных характеристик в корпусе между планетарными механизмами неподвижно установлено зубчатое колесо внутреннего зацепления с двумя сателлитами, один из которых жестко соединен с осью сателлита первого планетарного механизма, а другой - с осью сателлита второго планетарного механизма, водила подвижно установлены на выходном валу и кинематически соединены с сателлитами и через равноплечие коромысла - со штоками поршней, причем центральные шестерни неподвижно закреплены на выходном валу, а колеса внутреннего зацепления планетарных механизмов размещены в корпусе с возможностью вращения. Водила выполнены крестообразными, причем водило первого планетарного механизма одним концом через ось сателлита и коромысло шарнирно связано со штоком поршня первого цилиндра, а другим концом через коромысло - со штоком поршня второго цилиндра, водило второго планетарного механизма одним концом через ось сателлита и коромысло шарнирно связано со штоком поршня второго цилиндра, а другим концом через коромысло - со штоком поршня первого цилиндра [2] .
Недостатком двигателя является то, что он выполнен с зубчатым колесом внутреннего зацепления с двумя сателлитами, один из которых жестко соединен с осью сателлита первого планетарного механизма, а другой - с осью сателлита второго планетарного механизма, и содержит водила, выполненные крестообразными, дополнительные колеса внутреннего зацепления планетарных механизмов, размещенные в корпусе с возможностью вращения. Эти признаки усложняют конструкцию двигателя, так как только на одну поршневую группу необходимо иметь водило сложной крестообразной формы с двумя блоками сателлитов и с двумя отдельными сателлитами, одно подвижное зубчатое колесо с внутренним зацеплением. Планетарные механизмы выполнены как редуктор Давида с двумя внутренними зацеплениями, который, как известно, имеет низкий КПД.
Цель изобретения заключается в упрощении конструкции двигателя.
Цель достигается тем, что в двигателе внутреннего сгорания, содержащем корпус, по меньшей мере два цилиндра с расположенными в них в противофазе поршнями, каждый из которых соединен при помощи двух равноплечих коромысел с одним из механизмов преобразования движения, который выполнен в виде солнечного колеса, жестко установленного на выходном валу, коронной шестерни с внутренним зацеплением, размещенной в корпусе с возможностью ее свободного вращения, по меньшей мере одного сателлита, установленного подвижно на оси водила и зацепленного с коронной шестерней и солнечным колесом, и механизма регулировки хода, размещенного на валу и связанного с одним из поршней, причем водило одного механизма непосредственно связано с первым коромыслом одного поршня, а водило другого - с его вторым коромыслом при помощи двуплечего рычага, расположенного на оси выходного вала, согласно изобретению, сателлиты обоих механизмов зацеплены с общей коронной шестерней, первое коромысло другого поршня соединено с механизмом регулировки хода, а его второе коромысло связано со свободным концом двуплечего рычага при помощи оси, параллельной выходному валу.
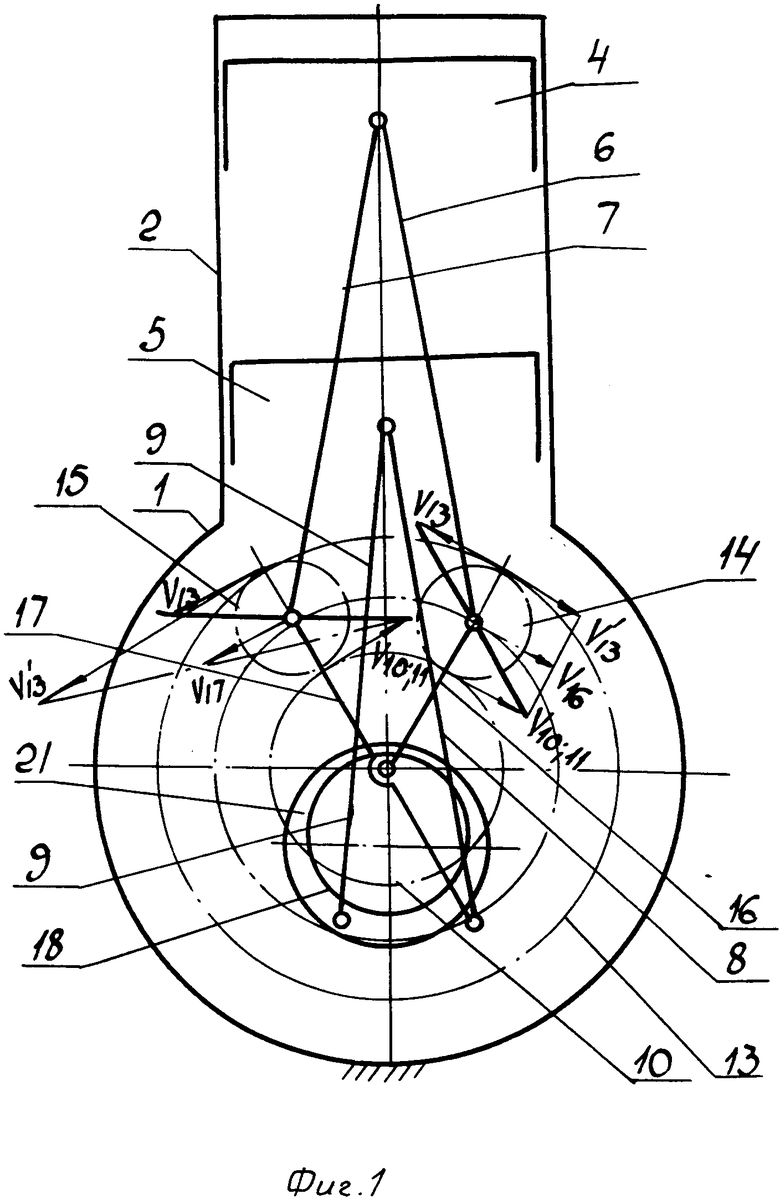
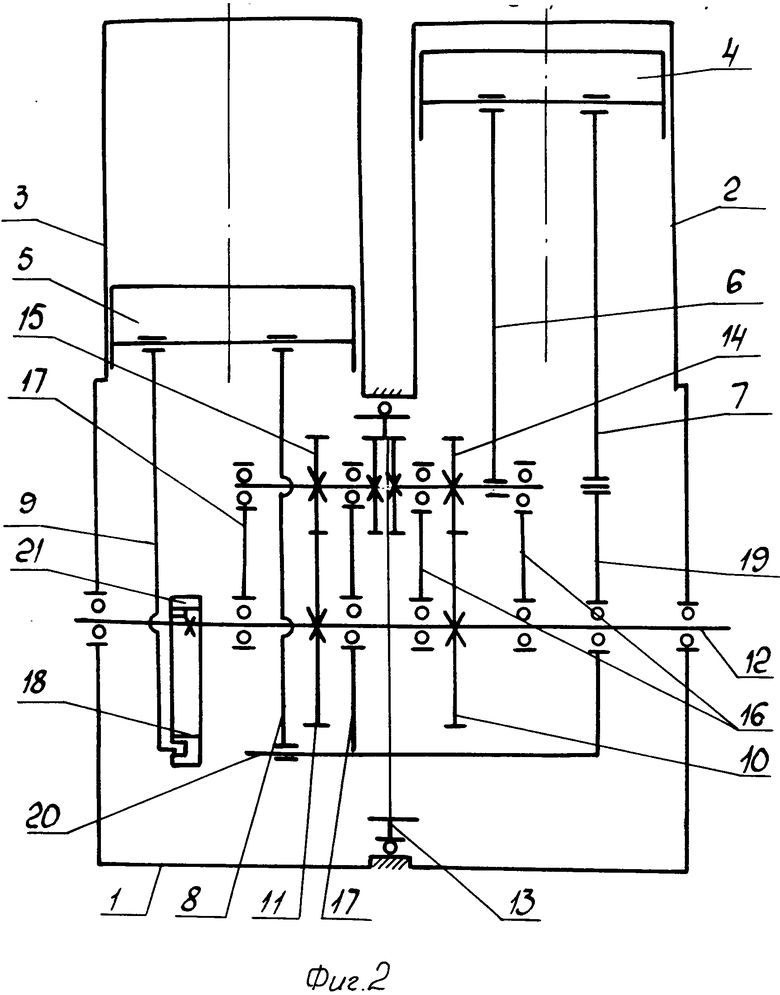
На фиг. 1 и 2 изображена кинематическая схема двигателя в двух проекциях.
Двигатель внутреннего сгорания содержит корпус 1, по меньшей мере два цилиндра 2 и 3 с расположенными в них в противофазе поршнями 4 и 5, каждый из которых соединен при помощи двух равноплечих коромысел 6, 7, 8 и 9 с одним из механизмов преобразования движения, который выполнен в виде солнечного колеса 10 и 11, жестко установленного на выходном валу 12, коронной шестерни 13 с внутренним зацеплением, размещенный в корпусе 1 с возможностью ее свободного вращения, по меньшей мере одного сателлита 14 и 15, установленного подвижно на оси водила 16 и 17 и зацепленного с коронной шестерней 13 и солнечным колесом 10 и 11, и механизм 18 регулировки хода, размещенный на валу 12 и связанный с одним из поршней 5, причем водило 16 одного механизма непосредственно связано с первым коромыслом одного поршня 4, а водило 17 другого - с его вторым коромыслом 7 при помощи двуплечего рычага 19, расположенного на оси выходного вала 12. Сателлиты 14 и 15 обоих механизмов зацеплены с общей коронной шестерней 13, одно коромысло 9 другого поршня 5 соединено с механизмом 18 регулировки хода, а его второе коромысло 8 связано со свободным концом двуплечего рычага 19 при помощи оси 20, параллельной выходному валу 12. Механизм 18 регулировки хода выполнен в виде эксцентрика, установленного неподвижно на валу 12, и втулки 21 с кольцевым пазом, надетой на эксцентрик и соединенной подвижно с коромыслом 9.
Механизмы преобразования движения выполнены в виде редуктора Давида с одним внешним и одним внутренним зацеплением, имеющим высокий КПД. Обе поршневые группы с помощью двуплечего рычага 19 и оси 20 взаимосвязаны между собой, причем дифференциальный зубчатый механизм рабочей в данный момент поршневой группы, у которой поршень перемещается вниз, замыкается через коронную шестерню 13 и нерабочую поршневую группу. В следующем такте поршневые группы меняются ролями, так как их механизмы преобразования движения идентичны друг другу. Шестерня 13, входя в замыкающие цепочки обеих поршневых групп и опираясь на водило нерабочей поршневой группы, вращающееся с иной частотой в противоположную сторону, чем водило рабочей поршневой группы, воспринимает опорный или реактивный момент. Это можно установить сопоставлением угловых частот вращения вала 12 и шестерни 13, рассматривая дифференциальные механизмы поршневых групп. Угловые частоты вращения водил 16 и 17 согласно уравнению Виллиса для дифференциальных механизмов
ω16= U16;1013˙ω10+U16;1310˙ω13 ; (1)
-ω17= U17;1113˙ω11-U17;1311˙ω13 , (2) где ω16 и ω17 - угловые частоты вращения водил 16 и 17, причем ω17имеет знак (-), так как водило 17 вращается в противоположную сторону, чем водило 16, вращающееся в принятом за положительное направление по часовой стрелке;
ω10 и ω11 - угловые частоты вращения центральных солнечных колес 10 и 11, причем ω10 = ω11, так как колеса 10 и 11 закреплены на одном и том же валу 12. ω10 и ω11 всегда положительны, так как при рабочем ходе того или иного поршня 4 или 5 вал 12 вращается в сторону направления вращения водила 16 или 17 рабочей поршневой группы по часовой стрелке. Значения ω10 или ω11 всегда устанавливаются минимально возможные, так как вал 12, связанный с ходовыми колесами, преодолевает полезное сопротивление;
ω13- угловая частота вращения коронной шестерни 13. Как показывают уравнения (1) и (2), шестерня 13 вращается под действием водила 16 по часовой стрелке, а под действием водила 17 - против часовой стрелки (см. также планы скоростей на фиг. 1). Поэтому на шестерне 13, свободной от полезного сопротивления, складываются две скорости от двух ведущих водил 16 и 17, определяемые уравнениями Виллиса:
ω13= U13;1016˙ω10+U13;1610˙ω16 ; (3)
ω13= U13;1117˙ω11-U13;1711˙ω17 . (4)
Так как числа зубьев центральных колес 10 и 11 одинаковы, т. е. Z10= Z11, также равны числа зубьев сателлитов 14 и 15, то передаточные отношения U13;1610 и U13;1711 от шестерни 13 до водила 16 или 17 при неподвижном колесе 10 или 11 равны между собой. Тогда, складывая уравнения (3) и (4), получаем:
2 ω13= U13;1016˙ω10+U13;1117˙ω11 , где передаточные отношения равны
U = -
= -  ;
;
U = -
= -  .
.
При равных Z10 = Z11 и ω10= ω11
2ω13= -2  · ω10 или
· ω10 или
ω13= -  · ω10. (5)
· ω10. (5)
Уравнение (5) показывает, что угловая частота вращения шестерни 13 равна алгебраической сумме скоростей от водил 16 и 17 (см. также планы скоростей на фиг. 1) и имеет постоянную величину, определяемую уравнением (5). Знак (-) в уравнении (5) показывает, что шестерня 13 вращается в противоположную сторону по сравнению с водилом 16 и с колесами 10 и 11, т. е. против часовой стрелки. Тогда с учетом знака (-) угловой частоты ω13 согласно уравнению Виллиса угловая частота вращения солнечного колеса 10 будет
ω10= U10;1316˙(-ω13)+U10;1613˙ω16 , где U10;1316 - передаточное отношение от колеса 10 до шестерни 13 при неподвижном водиле 16;
U10;1613 - передаточное отношение от колеса 10 до водила 16 при неподвижной шестерне 13.
U -
- = -
= -  ;
;
U -
-  = 1 +
= 1 +  ;
;
ω10= -  · (-ω13) +
· (-ω13) +  1 +
1 +  ω16;
ω16;
ω10= -  ·
·  -
- -
-  +
+ 1 +
1 +  = -ω10+
= -ω10+  1 +
1 +  w16.
w16.
2ω10=  1 +
1 +  ;
;
ω10=  · w16; (6)
· w16; (6)
ω13=  -
- 
 · ω16= -
· ω16= -  · ω16 (7)
· ω16 (7)
По уравнениям (6) и (7) определяются угловые частоты вращения колеса 10 или вала 12 и шестерни 13 по известной частоте вращения водила 16 и 17.
Анализ уравнений (1)-(7) и планы скоростей на фиг. 1 показывают, что шестерня 13 вращается в 2 раза с большей скоростью от водила 17 против часовой стрелки, чем по часовой стрелке от водила 16 (см. сплошные и штрих-пунктирные линии, векторы V13 и V13' на плане скоростей). В итоге сложением скоростей на общем замыкающем звене обоих дифференциальных механизмов устанавливается единственная определенная угловая частота вращения шестерни 13 с модулем, равным частоте вращения отдельно от водила 16, но направленная в сторону вращения водила 17. Так замыкающее звено-шестерня 13, как и во всех замкнутых дифференциальных механизмах, уравнивает скорости движения подвижных звеньев двух взаимосвязанных дифференциальных механизмов, но и сообщает им одно единственное определенное движение со степенью подвижности W1 равной единице. На плане фиг. 1 векторы скоростей V16 и V17 водил 16 и 17 при совместном рассмотрении движений обоих дифференциальных механизмов, что имеет место в реальном двигателе, равны нулю что позволяет шестерне 13, опираясь на водило нерабочей поршневой группы, воспринимать опорный или реактивный момент в механизме рабочей поршневой группы, вследствие чего передается в этой группе крутящий момент от водила центральному колесу, т. е. валу 12.
Числа зубьев Z14; Z15; Z10 и Z13 выбираются таким образом, чтобы всегда имели место благоприятные углы давления между водилами 16 и 17 с одной стороны и коромыслами 6 и 8 с другой. Только в этом случае в отличие от известных кривошипно-ползунных механизмов, в которых, когда шатун накладывается на кривошип или является его продолжением при углах давления, равных 90о, не передается момент на коленчатый вал, будет почти постоянен крутящий момент на выходном валу 12. Кроме того, эти числа зубьев выбираются таким образом, чтобы достигались наибольшие значения углов поворота водил 16 и 17, следовательно, большие значения ходов поршней 4 и 5.
Согласно уравнению (6):
ϕ10=  · ϕ16, (8)
· ϕ16, (8)
ϕ10 - угол поворота вала 12, принимаем равным 180о за один ход поршня;
ϕ16 - угол поворота водила 16 принимаем равным 120о, при котором достигается достаточный ход поршней при благоприятных углах давления, не превышающих 30о, между водилами и коромыслами.
180° =  · 120°; 1,5·2·Z10= Z10+Z13
· 120°; 1,5·2·Z10= Z10+Z13
3Z10-Z10= Z13; 2Z10= Z13; Z10= 
Принимаем Z14 = 18.
Тогда согласно условию сборки
Z13= 2Z14+ Z10= 36 +  ;
;
2Z13= 72+Z13; Z13= 72
Z10 =  = 36
= 36
Модули всех зубчатых колес одинаковы. Двигатель содержит 12 подвижных звеньев, 15 кинематических пар Vкл. и 5 кинематических пар IVкл. в виде зубчатых зацеплений и пальца в пазу эксцентриков 18 и 21. Степень подвижности W двигателя равна единице, следовательно, он является механизмом.
Двигатель разработан на базе малолитражного двигателя модели УД2-М1, выпускаемого Ульяновским моторным заводом, имеющего два вертикально рядно расположенных цилиндра диаметром и ходом поршней соответственно 72 и 75 мм. Суммарный эксцентриситет эксцентриков 28 и 21 равен ходу поршня. Ход поршней 4 и 5 регулируется изменением положения наружного эксцентрика 21 относительно внутреннего эксцентрика 28, закрепленного на выходном валу 12.
Двигатель работает следующим образом. В случае, например, двухтактного двигателя в одном цилиндре 2 происходит рабочий ход (поршень 4 вначале находится в крайнем верхнем положении), а в другом цилиндре 3 - сжатие (поршень 5 вначале находится в крайнем нижнем положении). При этом водило 16 вращается по часовой стрелке, а водило 17 - против часовой стрелки, блок сателлитов 14, обкатываясь своими сателлитами по колесам 13 и 10, отталкиваясь от колеса 13, вращает колесо 10, а вместе с ним выходной вал 12 и колесо 11 по часовой стрелке. Одновременно во втором дифференциальном механизме ведущие входы: водило 17 и колесо 11 вращают ведомый выход, а именно шестерню 13 против часовой стрелки, заставляя воспринимать опорный или реактивный момент в первом механизме, при этом блок 15 своими сателлитами обкатывается по колесам 13 и 11 и вращает водило 17 против часовой стрелки, которое через коромысло 8 поднимает вверх поршень 5. Так ведущими звеньями: водилом 17 и колесом 11 реализуется уравнение (4), поддерживая угловую частоту вращения колеса 13 согласно уравнению (5). Вернее и нижнее крайние положения поршней 4 и 5 в конце хода ограничиваются эксцентриками 28 и 21 через коромысло-шатун 9.
При рабочем ходе поршня 5 поршень 4 поднимается вверх, водило 16 вращается против часовой стрелки, а водило 17 - по часовой стрелке, в цилиндре 2 происходит сжатие, а в цилиндре 3 - расширение. В этом случае идентичные первый и второй дифференциальные механизмы поменяются ролями с той лишь разницей, что уравнение (1) будет справедливо для второго дифференциального механизма, а уравнение (2) - для первого дифференциального механизма. Поэтому вал 12 будет продолжать вращение по часовой стрелке, а колесо 13 - против часовой стрелки согласно уравнениям (6) и (7). Изменяя относительное положение эксцентриков 28 и 21, можно регулировать угол поворота водил 16 и 17 за один ход поршней 4 и 5.
Предлагаемый двигатель внутреннего сгорания, как и прототип, имеет значительные преимущества по сравнению с известными приводами в виде кривошипно-ползунных механизмов поршневых двигателей. Основное преимущество заключается в постоянстве крутящего момента на выходном валу 12, вследствие этого на подвижные звенья двигателя действуют меньшие силы инерции, динамические нагрузки, машину с таким приводом меньше трясет, так как двигатель не является источником вибраций и колебаний с частотой вращения коленчатого вала. В двигателе отсутствуют такие неуравновешенные детали типа шатунов, вследствие симметричной передачи движущих сил от поршней на равноплечие коромысла в две противоположные стороны достигается строго вертикальное перемещение поршней в цилиндрах, исключаются боковые нагрузки на поршневую группу. Этим самым резко ограничивается износ поршневых колец, рубашки цилиндра, внутренняя поверхность которой вместо цилиндрической становится эллиптической с большей осью, расположенной в плоскости перемещения шатуна с кривошипом, и т. д. Привод позволяет полнее в течение всего цикла, соответствующего одному обороту выходного вала, использовать движущие силы поршней, не привлекая для этих целей дополнительные маховые массы, при наиболее благоприятных углах давления между водилами и коромыслами, что намного повышает его КПД, позволяет достичь равномерной скорости вращения выходного вала, меньшего коэффициента неравномерности хода. Предлагаемый привод всетопливный, так как, регулируя общий эксцентриситет эксцентриков 28 и 21 и тем самым одинаково ход поршней, можно изменять степень сжатия горючих смесей и заодно частоту вращения выходного вала.
Привод малогабаритный, так как он выполнен в виде коаксиально расположенных коленорычажных механизмов и дифференциальных зубчатых передач вокруг общей оси двигателя. Эти механизмы и передачи надежны в работе и удобны в эксплуатации.
По сравнению с прототипом двигатель проще по конструкции, так как он содержит вместо 19 лишь 12 подвижных деталей, не имеет сложных сдвоенных водил крестообразной формы, имеет вместо трех лишь одно крупногабаритное колесо с внутренним зацеплением. Предлагаемый двигатель по сравнению с прототипом имеет значительно выше КПД, так как в нем при одной и той же частоте вращения выходного вала намного больше ход поршней, что достигнуто поворотом водил 16 и 17 вместо 45о на 120о. Кроме того, оба дифференциальных механизма выполнены на основе планетарного механизма Давида с одним внешним и с одним внутренним зацеплением, имеющего КПД значительно выше, чем планетарные механизмы Давида с двумя внутренними зацеплениями, примененными в прототипе.
В двигателе нет неподвижного звена, воспринимающего опорный или реактивный момент и передающего при этом всевозможные толчки и вибрации на корпус двигателя. Поэтому предлагаемый двигатель с замыкающим обе поршневые группы звеном гасит вибрации в замкнутых цепях подвижных звеньев, работает более бесшумно и плавно. Отсутствие планетарного механизма в составе двигателя позволяет ему регулировать частоту вращения выходного вала плавным изменением частоты вращения шестерни 13, соединив его, например, с маховиком или с другим регулятором.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКАЯ АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1993 |
|
RU2083385C1 |
| Двигатель внутреннего сгорания | 1984 |
|
SU1229398A1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ РЕГУЛИРОВАНИЯ ВАРИАТОРА | 1991 |
|
RU2022182C1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА В.П.ДЕМИНА | 1989 |
|
RU2010138C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ И ПРИВОД РАСПРЕДЕЛИТЕЛЬНОГО ВАЛА | 2009 |
|
RU2465474C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| Базовый вариатор бесступенчатой трансмиссии | 2023 |
|
RU2806457C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ШАШКИНА С АВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВРАЩЕНИЯ | 1996 |
|
RU2116461C1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ С РЕГУЛИРУЕМОЙ СТЕПЕНЬЮ СЖАТИЯ | 2008 |
|
RU2382217C1 |
| Планетарная коробка передач | 2017 |
|
RU2646982C1 |
Сущность изобретения: двигатель внутреннего сгорания содержит корпус, по меньшей мере два цилиндра с расположенными в них в противофазе поршнями, каждый из которых соединен при помощи двух равноплечих коромысел с одним из механизмов преобразования движения, который выполнен в виде солнечного колеса, жестко установленного на выходном валу, коронной шестерни с внутренним зацеплением, размещенной в корпусе с возможностью вращения по меньшей мере одного сателлита, установленного на водиле и зацепленного с коронной шестерней и солнечным колесом, и механизма регулировки хода, размещенного на валу и связанного с одним из поршней, причем водило одного механизма непосредственно связано с первым коромыслом одного поршня, а водило другого - с его вторым коромыслом при помощи двуплечего рычага, расположенного на оси выходного вала. Двигатель отличается тем, что сателлиты обоих механизмов зацеплены с общей коронной шестерней, первое коромысло другого поршня соединено с механизмом регулировки хода, а его второе коромысло связано со свободным концом двуплечего рычага при помощи оси, параллельной выходному валу. Двигатель имеет значительные преимущества по сравнению с известными приводами в виде кривошипно-ползунных механизмов. Он имеет постоянный крутящий момент на выходном валу, не имеет боковых нагрузок на поршневую группу, не является источником вибраций и колебаний, обладает меньшим коэффициентом неравномерности хода, на его детали действуют меньшие силы инерции и динамические нагрузки. Двигатель составлен из передач и механизмов, имеющих высокий КПД, проще по конструкции по сравнению с известными двигателями с прямым выходным валом вместо коленчатого, меньшей габаритами и массой. Двигатель всетопливный, позволяет регулировать степень сжатия топлива и частоту вращения выходного вала. 2 ил.
ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ, содержащий корпус, по меньшей мере два цилиндра с расположенными в них в противофазе поршнями, каждый из которых соединен при помощи двух равноплечих коромысел с одним из механизмов преобразования движения, который выполнен в виде солнечного колеса, жестко установленного на выходном валу, коронной шестерни с внутренним зацеплением, размещенной в корпусе с возможностью ее свободного вращения, по меньшей мере одного сателлита, установленного на водиле и зацепленного с коронной шестерней и солнечным колесом, и механизма регулировки хода, размещенного на валу и связанного с одним из поршней, причем водило одного механизма непосредственно связано с первым коромыслом одного поршня, а водило другого - с его вторым коромыслом при помощи двуплечего рычага, расположенного на оси выходного вала, отличающийся тем, что, с целью упрощения конструкции, сателлиты обоих механизмов зацеплены с общей коронной шестерней, первое коромысло другого поршня соединено с механизмом регулировки хода, а его второе коромысло связано со свободным концом двуплечего рычага при помощи оси, параллельной выходному валу.
