Изобретение относится к двигателям внутреннего сгорания (ДВС) и приводу распределительного вала для ДВС и может устанавливаться на автотранспорте, дорожных и сельскохозяйственных машинах, использоваться, как силовой агрегат в различных установках.
Известен двигатель по патенту RU 2239075, имеющий в качестве преобразователя движения две обгонные муфты, которые являются главным агрегатом, выполняющим функции преобразователя движения. Недостатком является тот факт, что обгонные муфты не рассчитаны по своей конструкции на работу в режиме автомобильного ДВС, а следовательно, срок службы их в этом качестве очень невелик.
Известны конструкции ДВС с механическим приводом - (кривошипно-шатунным механизмом) («Автомобильные двигатели». Под ред. доктора технических наук М.С.Ховаха. Машиностроение, 1977, стр.336). В этом ДВС преобразование тепловой энергии сгорающего топлива в механическую работу происходит внутри цилиндра ДВС и осуществляется с помощью кривошипно-шатунного механизма. Этот механизм является основным механизмом ДВС этого типа и служит для преобразования поступательного движения поршня во вращательные движения вала. В кривошипно-шатунный механизм входят следующие детали: цилиндр с размещенным в нем поршнем, шатун, коленчатый вал. Механизм установлен в блоке цилиндров, в котором цилиндры размещены в ряд (на оси кривошипа), либо могут быть другие компоновки (например, V-образная).
Недостатком его является большая потеря энергии вследствие работы кривошипно-шатунного механизма, большая металлоемкость, дороговизна при производстве.
Недостатки кривошипно-шатунного механизма.
1) Большая потеря энергии обусловлена прежде всего геометрией кривошипно-шатунного механизма:
а) Максимальное давление газов Р при рабочем ходе - поворот кривошипа φ°=12-20°. Сила, с которой вращается коленчатый вал, равна
 , т.е. Мкр.
, т.е. Мкр.
Как видно из формулы при постоянном значении Р (давления газов) и радиуса кривой R, конечный результат зависит от угла приложения силы. Для угла поворота кривошипа φ°=12-20° значение этой функции равно 0,4-0,45 («Автомобильные двигатели». Под ред. доктора технических наук М.С.Ховаха. Машиностроение, 1977, стр.575, табл.). Другими словами Т=Р·(0,4-0,45), т.е. имеет место потеря энергии в 2 раза.
б) При повороте кривошипа на равные углы поршень каждый раз проходит различные расстояния. Это приводит к возникновению значительных сил инерции в работающем ДВС и к потере энергии (ослабление Р при рабочем ходе), а также к неравномерности вращения.
в) Опрокидывающий момент, действие которого направлено против Мкр.
2) Центробежная сила (сила инерции вращения). Ее действие еще усугубляется большей окружной скоростью кривошипа.
Целью изобретения является устранение указанных выше недостатков. Указанная цель может быть достигнута путем замены кривошипа в ДВС представленным здесь устройством. Это устройство выполняет роль кривошипа - трансформирует возвратно-поступательное движение поршней во вращательное движение вала. Его можно назвать преобразователем движения.
В соответствии с изобретением предлагается двигатель внутреннего сгорания (ДВС), содержащий блок цилиндров, установленных в два параллельных ряда, ограничительный контур, преобразователь движения, расположенный на продольной оси симметрии и соединенный с основным валом двигателя, и скрепленное или отлитое заодно с одной из ведущих шестерен преобразователя коромысло, к каждому концу которого шарнирно прикреплены шатуны с жестко соединенными между собой по 2 поршнями; при этом преобразователь движения представляет из себя комбинацию из двух, содержащих по три или четыре сателлита, цилиндрических планетарных редукторов, последовательно расположенных на общем валу, который является для этих редукторов осью симметрии; при этом внутренняя (солнечная) шестерня каждого редуктора является ведомой - она жестко посажена на вал или выполнена заодно с валом, а внешние (коронные) большие шестерни являются ведущими; сателлиты каждого редуктора (в данном случае по три) свободно вращаются на осях, закрепленных на водилах, которые свободно посажены на ведущий вал и могут вращаться (вместе с сателлитами) только в одном направлении, так как на них расположено произвольное число запирающих роликов (по принципу действия обгонной муфты); при этом торцовые (обращенные друг к другу) стороны обеих ведущих (коронных) шестерен снабжены коническими венцами и находятся в постоянном зацеплении с малой конической шестерней, свободно посаженной на оси, закрепленной на корпусе перпендикулярно оси обоих редукторов.
Изобретение относится также к приводу распределительного вала, представляющему собой двойной кривошип для осуществления фаз газораспределения для данного ДВС.
Известны приводы распределительного вала в ДВС с механическим приводом. В описываемом в настоящем изобретении ДВС делать привод распределительного вала непосредственно от основного вала отбора мощности нельзя, т.к. наблюдается асинхронный эффект, т.е. возможное несовпадение на выходе оборотов основного вала с расстоянием, пройденным поршнем и соответственно ведущей шестерней.
В соответствии с изобретением описывается устройство для привода распределительного вала, или двойной кривошип-газораспределитель, содержащий вал, на котором размещены два кривошипа, один из которых, первый, жестко соединен с валом и с помощью шестерни находится в зацеплении с рейкой, соединенной с поршнем ДВС, а второй кривошип, посаженный свободно, связан с первым посредством возвратно-поступательной направляющей, в пазах которой поступательно двигается стержень, который является осью, на которую с помощью втулок насажены две верхние головки шатунов, а две нижние головки шатунов крепятся на шейках кривошипов, при этом второй кривошип находится в зацеплении с шестерней распределительного вала.
Ограничительный контур представляет из себя замкнутую поверхность, образованную параллельными прямолинейными направляющими, по которым с помощью ролика движется шатун, шарнирно соединенный с коромыслом; при этом эти направляющие соединены с помощью двух дуг полуокружностей, диаметр которых равен расстоянию между направляющими, а расстояние между двумя мертвыми точками равно ходу поршня.
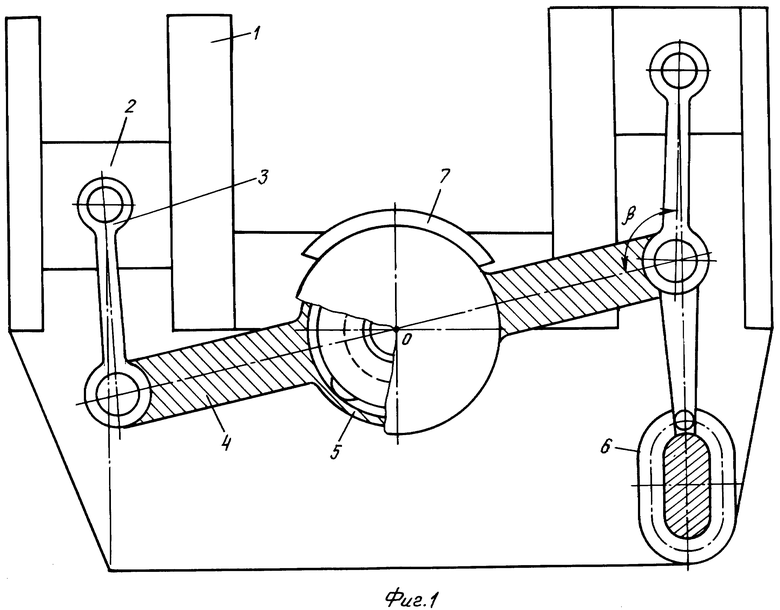
На фиг.1 изображен общий вид спереди описываемого ДВС с преобразователем движения.
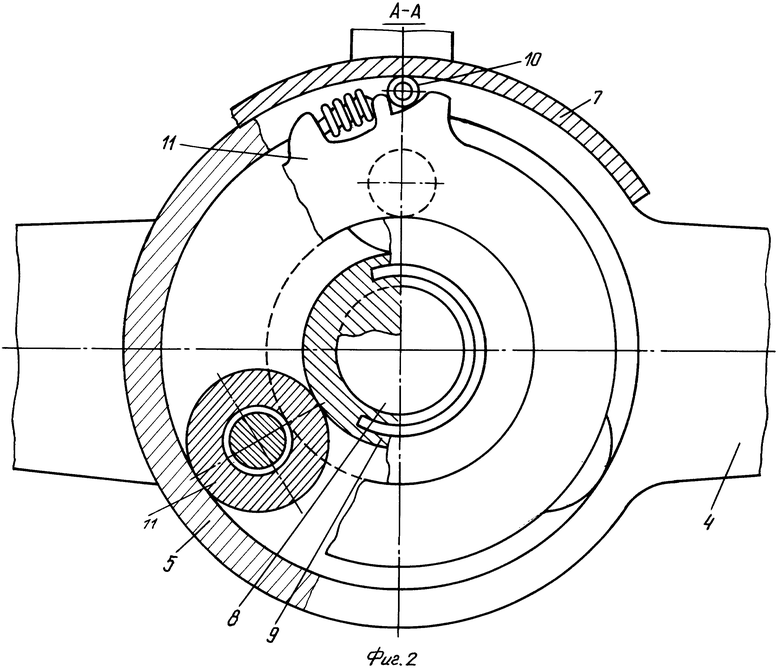
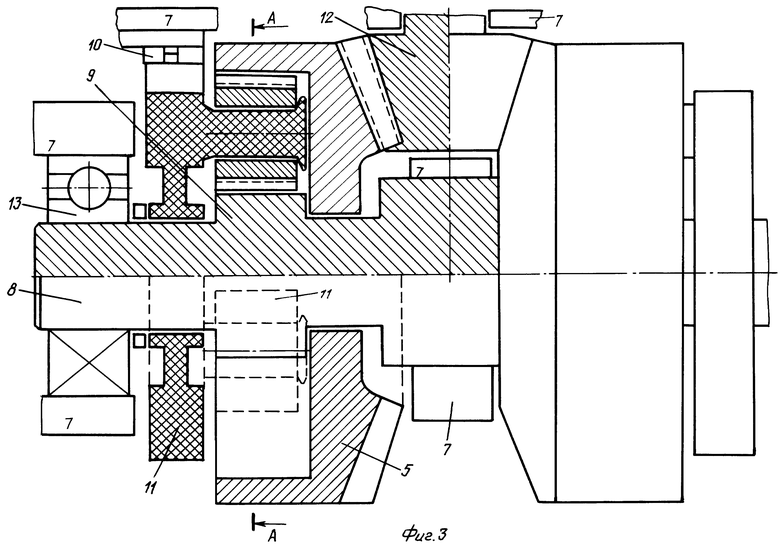
На фиг.2 и 3 изображен преобразователь возвратно-поступательного движения, (фиг.2 - вид спереди, фиг.3 - вид справа).
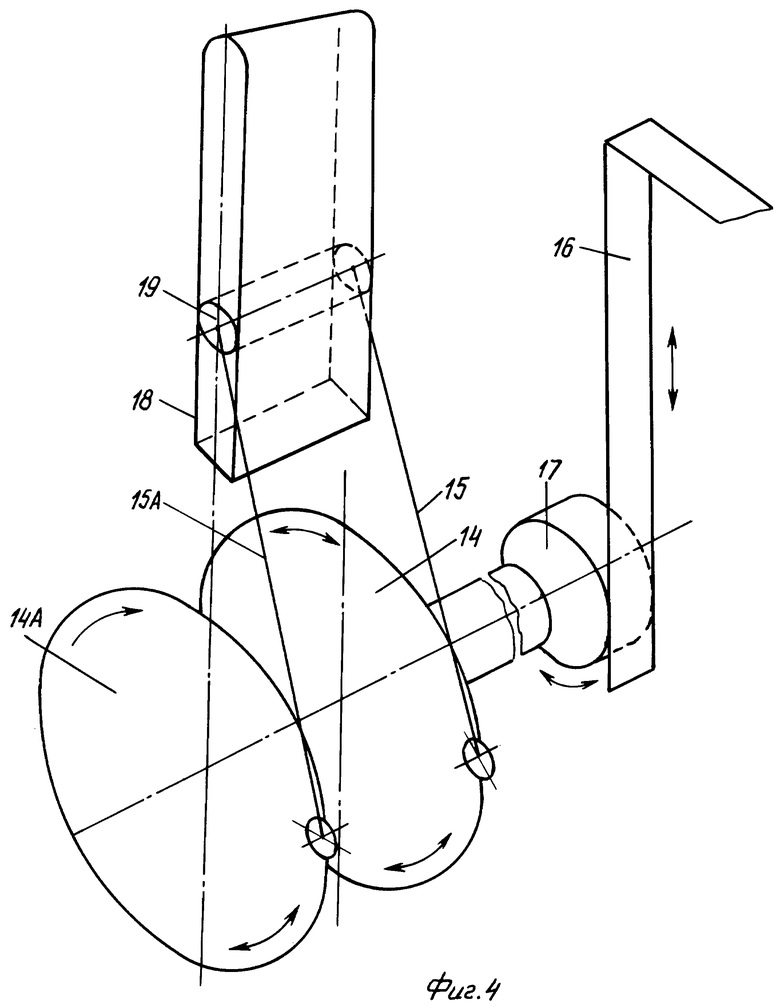
На фиг.4 изображен двойной кривошип.
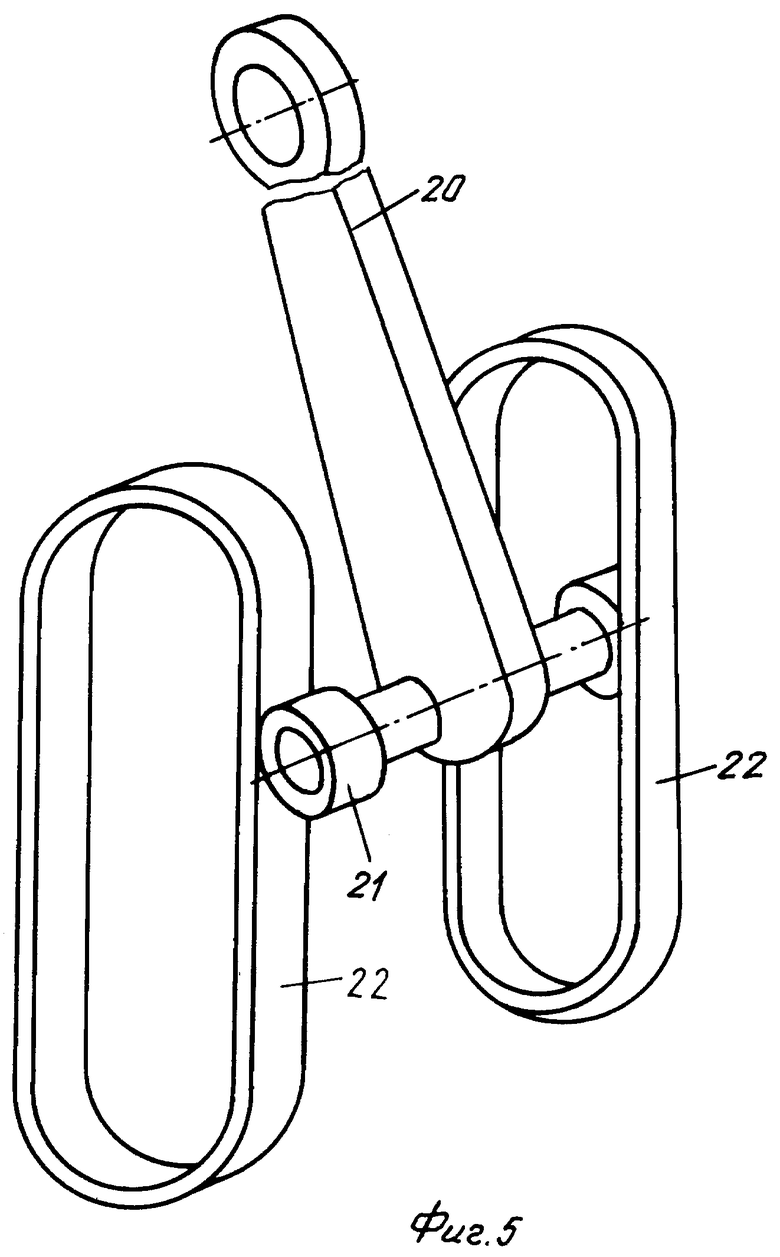
На фиг.5 изображен ограничительный контур.
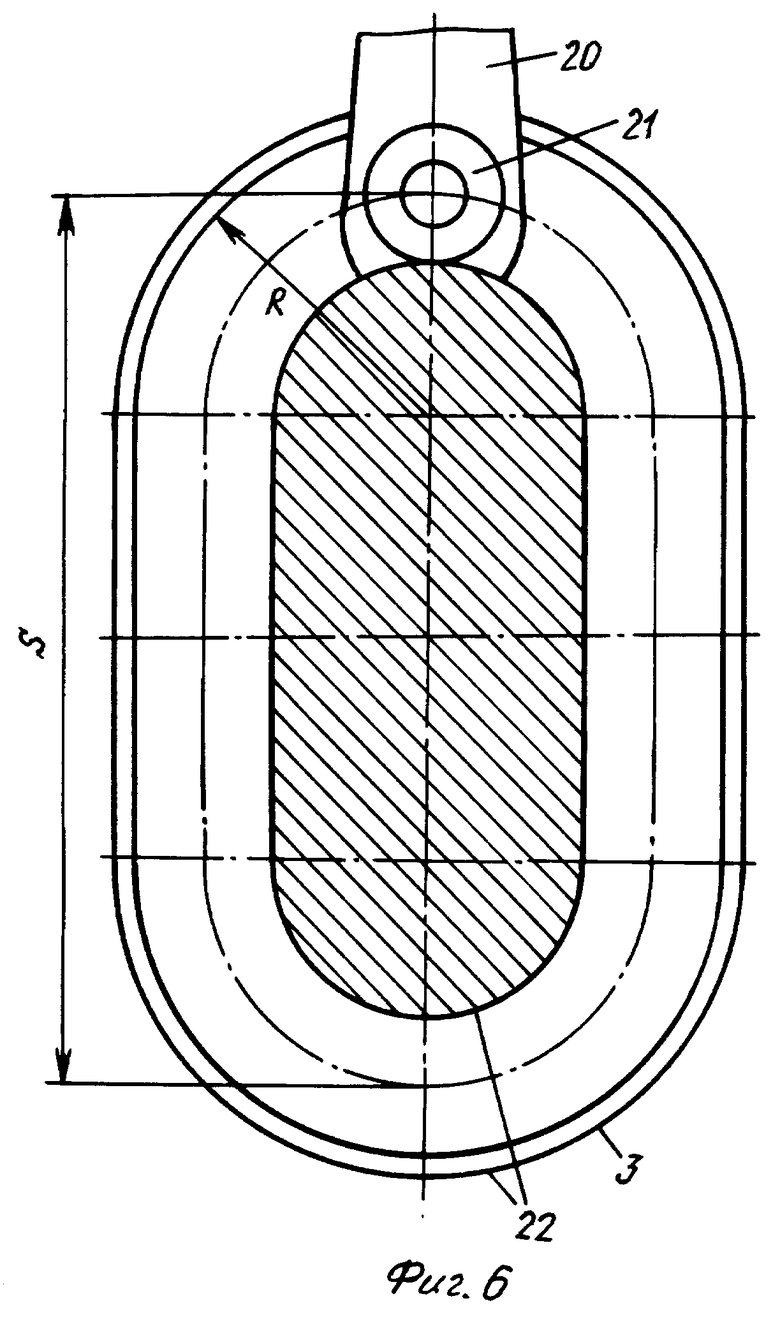
На фиг.6 изображено сечение фиг.5 по направляющей 22.
ДВС с преобразователем движения состоит из следующих частей.
Фиг.1:
1 - Блок установленных в два ряда цилиндров
2 - Поршни
3 - Шатуны
4 - Коромысло с ведущей шестерней
5 - Ведущая шестерня
6. - Ограничительный контур
7 - Корпус.
Фиг.2-3, преобразователь движения:
7 - Корпус
8 - Вал двигателя
9 - Ведомая шестерня
4 - Коромысло с ведущей шестерней 5
10 - Запирающие ролики
11 - Водило с сателлитами
12 - Малая коническая шестерня
13 - Подшипник
Фиг.4, привод распределительного вала - двойной кривошип-газораспределитель:
14 - Первый кривошип, посаженный жестко
14А - Второй кривошип, посаженный свободно
15, 15А - Шатуны
16 - Рейка
17- Шестерня привода
18 - Возвратно- поступательная направляющая
19 - Стержень.
Фиг.5, фиг.6, ограничительный контур:
20 - Шатун
21 - Ролики
22 - Направляющая.
Работа ДВС. Общая кинематическая схема. Фиг.1.
При рабочем ходе в одном из левых двух цилиндров (см. фиг.1) второй левый цилиндр поршень 2 идет вниз, т.к. поршни жестко связаны между собой специальным шатуном 3, который обеспечивает одновременное поднятие или опускание сразу двух левых поршней 2, хотя рабочий ход происходит только в одном цилиндре. Это нужно для нормального рабочего процесса, при котором обеспечивается синхронизация движения с правыми двумя поршнями. Два левых поршня идут вниз, толкая левый конец коромысла 4, который движется на сектор большой дуги с радиусом R (1/2 длины коромысла). Длина этого сектора соответственно равна ходу поршня 2 (S). Коромысло 4 вращает ведущую шестерню 5 (сделанную заодно с коромыслом), которая, так же как и коромысло, перемещается (совершает колебательные движения). Длина сектора перемещения ведущей шестерни 5 во столько же раз меньше длины сектора перемещения коромысла 4 с шатуном 3, во сколько раз радиус ведущей шестерни 5 меньше радиуса R большой окружности, по которой перемещается шатун 3 с поршнями 2, прикрепленный к концу коромысла 4. Название «ведущая шестерня» условно, т.к. она совершает только колебательные движения в обе стороны (вместе с коромыслом). Ведущая шестерня 5 приводит в действие преобразователь движения 6. Его работа будет рассмотрена далее. Правый конец коромысла 4 идет вверх с шатуном 3 двух правых цилиндров, оба правых поршня 2 поднимаются вверх. Это происходит за счет энергии рабочего хода одного левого поршня 2. Порядок работы цилиндров комбинируется таким образом, что 4 такта как бы «раскладываются» на 4 цилиндра.
При опускании двух левых поршней 2 в одном цилиндре происходит рабочий ход, в другом - впуск, а в противоположных цилиндрах - выпуск и сжатие. При опускании двух правых поршней 2 (после прохождения верхней мертвой точки (В.М.Т.)) все происходит наоборот. Этот процесс представляет собой 4-тактный цикл (как в обычном ДВС). В целом, на каждый такт рабочего цикла данный ДВС «выдает» по 1 рабочему ходу, так же как и обычный 4-цилиндровый 4-тактный ДВС. Возможна также компоновка, при которой цилиндры расположены в один ряд, тогда преобразователь движения устанавливается поперек продольной оси автомобиля.
Количество цилиндров может быть, как и в ДВС с кривошипом: шесть, восемь, десять, двенадцать и т.д. Конкретные схемы будут рассмотрены далее (см. «Работа преобразователя движения»).
Работа преобразователя движения. Фиг.2 и 3.
Ведущая шестерня 5 совершает двунаправленные движения (колебания), передаваемые ей через коромысло 4. Эти движения передаются через сателлиты с водилом 11 ведомой шестерне 9, которая жестко посажена на вал 8 (или сделана заодно с валом 8), вращается только в одном направлении и передает крутящий момент через коробку перемены передач (КПП) на колеса. Это становится возможным благодаря сателлитам (с водилом 11), у которых есть более одной степени свободы одновременно, а также инерции массы ведомой шестерни 9 с маховиком (не показан), которая, получив первоначальный импульс, при запуске двигателя от ведущей шестерни 5 начинает вращение в заданную сторону.
Рассмотрим детально этот процесс
На водиле установлены запирающие ролики 10 (по принципу действия обгонной муфты), позволяющие водилу с сателлитами 11 вращаться только в одном направлении. При вращении (колебаниях) ведущей шестерни 5 в сторону запирания (против часовой стрелки) роликов 10 сателлиты ограничиваются только одной степенью свободы и им остается только прокрутиться вслед за ведущей шестерней 5 и привести в движение ведомую шестерню 9, а водило остается на месте относительно корпуса. При запуске двигателя ведомая шестерня 9 находится в покое, поэтому если бы не было роликов 10 сателлиты с водилом, чтобы не преодолевать инерцию массы, могли бы просто перекатиться по неподвижной ведомой шестерне 9 в сторону действия ведущей шестерни 5. Но ролики 10 стопорят водило 11, и сателлиты вынуждены привести в движение ведомую шестерню 9, которая в данный момент отключена от трансмиссии. Таким образом, ролики 10 как бы задают направление вращения ведомой шестерни 9, а уже когда она наберет скорость вращения, то прокручивание осуществляется только за счет направленных в противоположные стороны векторов скорости ведущей шестерни 5 и ведомой шестерни 9, которая, пытаясь утянуть сателлиты с водилом за собой, препятствует ведущей шестерне 5 сделать то же самое в свою сторону, т.к. скорости этих шестерен практически равны. Исходя из этих условий у сателлитов опять остается только одна степень свободы - прокрутиться (без перекатывания) и передать импульс ведомой шестерне 3, а водило в этот момент остается неподвижным по отношению к корпусу.
Переместившись на определенный сектор, ведущая шестерня 5 начинает движение в другую сторону. Ведомая шестерня 9 уже начала вращаться в эту сторону (по часовой стрелке). Ведущая 5 и ведомая 39 шестерни теперь практически находятся в покое относительно друг друга, а следовательно, и сателлиты не вращаются относительно водила 11, хотя вместе они (водило с сателлитами) передвигаются, как одно целое с ведущей 5 и ведомой 9 шестернями; сателлиты как бы заклинивают. Таким образом, в зависимости от направления вращения ведущей шестерни 5, можно выделить режим прокручивания сателлитов 11 (водило находится в покое относительно корпусов) и режим заклинивания.
Как видно из устройства, основная передача энергии (импульсы) от ведущей шестерни 5 происходит при режиме прокручивания, а при режиме заклинивания ведущая 5 и ведомая 9 шестерни, а также сателлиты с водилом 11 как бы не мешают друг другу. Картина начинает меняться при увеличении подачи топлива в цилиндры. Ведущая шестерня 5 начинает совершать колебания быстрее и при цикле в сторону режима заклинивания будет сообщать сателлитам ускорение, обратное полученному при предыдущем режиме прокручивания. Но вектор скорости сателлитов 11 по инерции и из-за вращения ведомой шестерни 9 будет сохраняться как при режиме прокручивания, и поэтому после перемены направления движения (колебаний) ведущей шестерни 5 сателлиты будут препятствовать движению ведущей шестерни 5 и действительно заклинят, передавая таким образом импульс.
В целом режим заклинивания недостаточно эффективен, и для этого введен второй редуктор, ведущая шестерня которого взаимодействует с ведущей шестерней первого редуктора при помощи малой конической шестерни 12. Вследствие этого шестерни 5 обоих редукторов совершают колебания в противоположные стороны и режим прокручивания (как более эффективный) приходится на рабочие ходы обоих (левого и правого) блоков цилиндров.
Как уже было сказано, сателлиты обладают несколькими степенями свободы одновременно, и благодаря этому конструкция проявляет гибкость в работе: это можно назвать полусвободным реагированием.
Разберем частные случаи. При уменьшении скорости ведущей шестерни 5 (уменьшение подачи топлива) она начинает отставать от ведомой шестерни 9, на которую действует (при включенной передаче) инерция всей массы автомобиля. Таким образом, при цикле в режиме прокручивания сателлиты одновременно будут перекатываться в сторону действия избыточной энергии - сторону вращения ведомой шестерни 9, а в режиме заклинивания равновесия также будет нарушено и сателлиты будут перекатываться также в сторону вращения ведомой шестерни 9.
Таким образом, при ускорениях (положительных или отрицательных) из-за наличия степеней свободы действие сателлитов будет усиливаться и это будет приводить к большей равномерности работы преобразователя и повышению КПД.
При резком сбросе нагрузки ДВС будет реагировать с опозданием в зависимости от перепада между начальной и конечной скоростью поршня. При этом вероятность работы «в разнос» будет снижена, так как скорость вращения ведомой шестерни будет значительно ниже, чем у газотурбинного двигателя внутреннего сгорания.
Рассмотрим теперь конкретные схемы для многоцилиндровых ДВС с предлагаемым здесь преобразователем движения.
При числе цилиндров 8 возможны в принципе 2 схемы. Первая схема наиболее простая: фиг.1 и фиг.2
Коромысло остается только на одной из ведущих шестерен, и к нему крепятся жестко уже 4 поршня 2. Работа идентична работе 4-цилиндрового ДВС: один конец коромысла 4 (фиг.1) с 4-мя поршнями идет вниз, другой вверх, и уже в двух цилиндрах в одном блоке происходит рабочий ход, а в противоположном блоке - выпуск и сжатие в 4-цилиндрах, т.е. это как бы сдвоенный 4-цилиндровый ДВС. Как видно, поршни, идущие вниз одного блока, уравновешивают поршни, идущие вверх противоположного блока, хотя, конечно, здесь явно будет слишком большая нагрузка на коромысло и большой опрокидывающий момент на раму, поэтому эта схема будет приемлема только для ДВС с небольшими цилиндрами.
Гораздо более эффективна следующая схема: преобразователь остается, как для 4-цилиндрового ДВС, только ко второй ведущей шестерне второго планетарного редуктора тоже прикреплено (отлито воедино) коромысло. Следуя работе преобразователя, эти 2 коромысла (так же как и ведущие шестерни 5) вращаются в противоположных направлениях. К каждому концу коромысла (как и в других схемах) жестко прикреплено по 2 поршня. Таким образом, когда левый конец одного коромысла идет вниз (фиг.1), левый же конец другого коромысла идет вверх, а в противоположном блоке - наоборот. В левом блоке происходят: впуск и рабочий ход (одно коромысло) и выпуск и сжатие (другое коромысло), а в правом блоке соответственно выпуск и сжатие и впуск и рабочий ход. Таким образом, 8-цилиндровый ДВС выдает по 2 рабочих хода на 1 такт в разных блоках, при этом опрокидывающий момент одного коромысла уравновешивается моментом (противоположным) другого коромысла.
Схема 6-цилиндрового ДВС такая же, как у 8-цилиндрового коромысла, только у второго коромысла имеется по 1 поршню с каждой стороны. В целом такой ДВС будет выдавать по 3 рабочих хода на 2 последовательно идущих такта (будет чередование - первый такт два рабочих хода, следующий такт - 1 рабочий ход и т.д.).
Работа ограничительного контура
Ограничительный контур служит для ограничения траектории движения поршня и плавной остановки поршня в мертвых точках. При движении поршня 2 связанный с ним шатун 20 (фиг.5, фиг.6) вместе с роликами 21 движется вдоль направляющей 22, которая состоит из двух контуров - внутреннего и внешнего. Внутренний контур устраняет люфт роликов 21 внутри внешнего контура, а внешний контур уже ограничивает длину траектории хода поршня. Конфигурация направляющих должна быть такой, чтобы связанный с шатуном 20 поршень 2 плавно тормозил в мертвых точках и чтобы перепады скорости, по возможности, были наименьшими.
Работа привода распределительного вала - двойного кривошипа-газораспределителя. Фиг.4.
Возвратно-поступательные движения рейки 16 передаются через шестерню 17 валу, на котором жестко посажен кривошип 14, который синхронно вращается с движениями рейки 16 (двунаправленное вращение). Один поворот кривошипа 14 равен 180°, а по длине окружности это расстояние равно ходу поршня. Вращение кривошипа 14 передается через шатун 15 стержню 19, который движется в пазах возвратно-поступательной направляющей 18. С другой стороны к стержню 19 прикреплен шатун 15А кривошипа 14А, который уже посажен на вал свободно и поэтому за счет сил инерции вращается уже только в одну сторону, вращая через блок шестерен распределительный вал (не показан), вращение которого полностью синхронизировано с движениями поршня.
Кроме того, кривошип 14А оснащен маховиком для накапливания энергии в случае пропуска вспышки в одном из цилиндров.
Двойной кривошип-газораспределитель также может выполнять функции компрессора.
Кроме того, кривошип 14А соединен со стартером для запуска двигателя.
В ДВС с механическим приводом в виде кривошипно-шатунного механизма равномерность вращения определяется количеством рабочих ходов, приходящих на 1 оборот кривошипа. Это величина постоянная и зависит только от геометрии кривошипа:
 или
или 
где S - длина хода поршня, Dкривошипа - диаметр кривошипа, Rкривошипа - радиус кривошипа.
Изменения могут зависеть только от числа тактов и количества цилиндров.
В описываемом ДВС геометрия более сложная, см. фиг.1. При одинаковом ходе поршня 2 крутящий момент на валу находится в прямой, а скорость перемещений (колебаний) ведущей шестерни 5 в обратной зависимости от длины радиуса коромысла 4 Rкоромысла.
Наблюдается отношение:

где S - длина хода поршня, Rведущей шестерни - радиус ведущей шестерни, Rведомой шестерни - радиус ведомой шестерни, lceктopa перемещения ведущей шестерни - длина сектора перемещения ведущей шестерни, при условии, что Rведущей шестерни=Rведомой шестерни, из которого получается число рабочих ходов на 1 оборот выходного (ведомого) вала для 4-тактного 4-цилиндрового две.
Пример 1. В данном ДВС S=120 мм; Rкоромысла=200-300 мм (возьмем 240 мм), Rведущей шестерни / Rведомой шестерни =2,5 (фиг.2).
12/2,5=4,8 ходов/1 оборот, откуда

Таким образом, равномерность также находится в прямой зависимости от R коромысла.
В действительности рабочих ходов будет немного меньше из-за торможения поршня вблизи Н.М.Т. и В.М.Т. ограничительного контура.
«Пограничный зоной» преобразования является ведущая шестерня 2 (фиг.2), т.к. ее перемещения (колебания) - это уже фрагмент вращательного движения и поэтому дальнейшее изменение передаточного числа в планетарном редукторе уже никак не будет отражаться на равномерности вращения. В крайнем случае 4,8 ход./оборот (для данного примера).
Преимущества ДВС с преобразователем движения
Повышение к.п.д. вследствие улучшения геометрии привода преобразователя движения. Происходит увеличение проекции плеча приложения силы (фиг.1). Это приводит к увеличению работы газов при рабочем ходе.
Кроме того, на повышение к.п.д. будут влиять следующие факторы:
1. Более плавное движение поршня и, как следствие, снижение сил инерции возвратно-поступательных масс.
2. Значительное улучшение равномерности вращения ведомого вала (вала двигателя) и, как следствие, возможность увеличения диаметра цилиндров и снижения их числа, т.е. уменьшение площади поверхности цилиндров и снижение тепловых потерь.
3. Снижение центробежных сил (сил инерции вращения) из-за меньших скоростей колебаний ведущей шестерни и вращения ведомой шестерни.
Изобретение относится к области машиностроения и может быть использовано в двигателях внутреннего сгорания. Двигатель внутреннего сгорания содержит блок цилиндров, ограничительный контур и преобразователь движения. Цилиндры установлены в два параллельных ряда. Преобразователь движения расположен на продольной оси симметрии, соединен с основным валом двигателя и содержит скрепленное или отлитое заодно с ведущей шестерней преобразователя коромысло. К каждому концу коромысла шарнирно прикреплены шатуны с жестко соединенными между собой по два поршнями. Преобразователь движения представляет собой комбинацию из двух цилиндрических планетарных редукторов, последовательно расположенных на общем валу, который является для этих редукторов осью симметрии. Внутренняя солнечная шестерня каждого редуктора является ведомой и жестко посажена на вал или выполнена заодно с валом, а внешние коронные шестерни являются ведущими. Сателлиты каждого редуктора свободно вращаются на осях, закрепленных на водилах, которые посажены свободно на ведущий вал и снабжены произвольным числом запирающих роликов и могут вращаться вместе с сателлитами. Торцовые (обращенные друг к другу) стороны обеих ведущих коронных шестерен снабжены коническими венцами и находятся в постоянном зацеплении с малой конической шестерней, свободно посаженной на оси, закрепленной на корпусе перпендикулярно оси обоих редукторов. Раскрыт привод распределительного вала для данного двигателя. Технический результат заключается в увеличении плавности хода поршня, снижении сил инерции, улучшении равномерности вращения вала двигателя. 2 н. и 2 з.п. ф-лы, 6 ил.
1. Двигатель внутреннего сгорания, содержащий блок цилиндров, установленных в два параллельных ряда, ограничительный контур, преобразователь движения, расположенный на продольной оси симметрии и соединенный с основным валом двигателя, и скрепленное или отлитое заодно с ведущей шестерней преобразователя коромысло, к каждому концу которого шарнирно прикреплены шатуны с жестко соединенными между собой по два поршнями, при этом преобразователь движения представляет из себя комбинацию из двух цилиндрических планетарных редукторов, последовательно расположенных на общем валу, который является для этих редукторов осью симметрии, где внутренняя солнечная шестерня каждого редуктора является ведомой и жестко посажена на вал или выполнена заодно с валом, а внешние коронные шестерни являются ведущими, при этом сателлиты каждого редуктора свободно вращаются на осях, закрепленных на водилах, которые посажены свободно на ведущий вал, снабжены произвольным числом запирающих роликов и могут вращаться вместе с сателлитами, при этом торцевые обращенные друг к другу стороны обеих ведущих коронных шестерен снабжены коническими венцами и находятся в постоянном зацеплении с малой конической шестерней, свободно посаженной на оси, закрепленной на корпусе перпендикулярно оси обоих редукторов.
2. Двигатель по п.1, где ограничительный контур представляет из себя замкнутую поверхность, образованную параллельными прямолинейными направляющими, по которым с помощью ролика движется шатун, шарнирно соединенный с коромыслом, при этом направляющие соединены с помощью двух дуг полуокружностей, а расстояние между двумя мертвыми точками равно ходу поршня.
3. Двигатель по п.1 или 2, где каждый редуктор содержит по три или четыре сателлита.
4. Привод распределительного вала для двигателя внутреннего сгорания, содержащий вал, на котором расположены два кривошипа, один из которых - первый, жестко соединенный с валом с помощью шестерни, находится в зацеплении с рейкой, соединенной с поршнем двигателя внутреннего сгорания, а второй кривошип, посаженный свободно, связан с первым посредством возвратно-поступательной направляющей, в пазах которой поступательно движется стержень, который является осью, на которую с помощью втулок насажены две верхние головки шатунов, а две нижние головки шатунов крепятся на шейках кривошипах, при этом второй кривошип находится в зацеплении с шестерней распределительного вала.
| US 5562075 А, 08.10.1996 | |||
| US 2006185631 A1, 24.06.2006 | |||
| ПОРШНЕВАЯ МАШИНА | 1998 |
|
RU2151878C1 |
| Многоцилиндровая поршневая машина объемного действия | 1978 |
|
SU1190997A3 |
| СКЛАДНАЯ ОДНООСНАЯ РУЧНАЯ ТЕЛЕЖКА | 1995 |
|
RU2090422C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ СВОБОДНО-ПОРШНЕВОЙ С ПОСТОЯННЫМ ПЛЕЧОМ СИЛЫ МОМЕНТА НА ВАЛУ | 2002 |
|
RU2239075C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КОНСЕРВОВ ИЗ ГОРОШКА | 2002 |
|
RU2218819C1 |
| Привод распределительного вала | 1982 |
|
SU1075014A1 |

