Изобретение относится к экспериментальной гидродинамике и касается технологии исследования и моделирования погружения тела в воду.
Известен способ моделирования погружения тела в воду, по которому погружают модель тела в бак с водой и создают усилие на модель, дополнительное к ее отрицательной плавучести, при этом усилие на модель передают посредством гибкой связи, проходящей через точку, расположенную на пересечении траектории свободного погружения модели с дном бака.
Известный способ позволяет с достаточной точностью моделировать погружение тела в воду, однако не может быть использован для моделирования этого процесса, когда на этапе погружения подводного аппарата производят его стабилизацию по курсу. Указанная стабилизация необходима в связи с тем, что из-за неизбежной геометрической и силовой (весовой) несимметрии тела (особенно при погружении на большую глубину) оно будет двигаться по спирали и придет в район работ с большой погрешностью как по координатам, так и по курсовому углу. При осуществлении известного способа также возможны уводы модели в сторону и движение ее вне вертикальной плоскости.
Невозможность моделирования погружения тела в воду со стабилизацией его по курсу сужает функциональные возможности известного способа.
Целью изобретения является расширение функциональных возможностей способа посредством моделирования стабилизации тела по курсу в процессе погружения.
Поставленная цель достигается тем, что ограничивают отклонение модели посредством двух прозрачных вертикальных щитов, которые размещают со взаимным удалением друг от друга на расстояние, равное максимальному поперечному размеру модели тела.
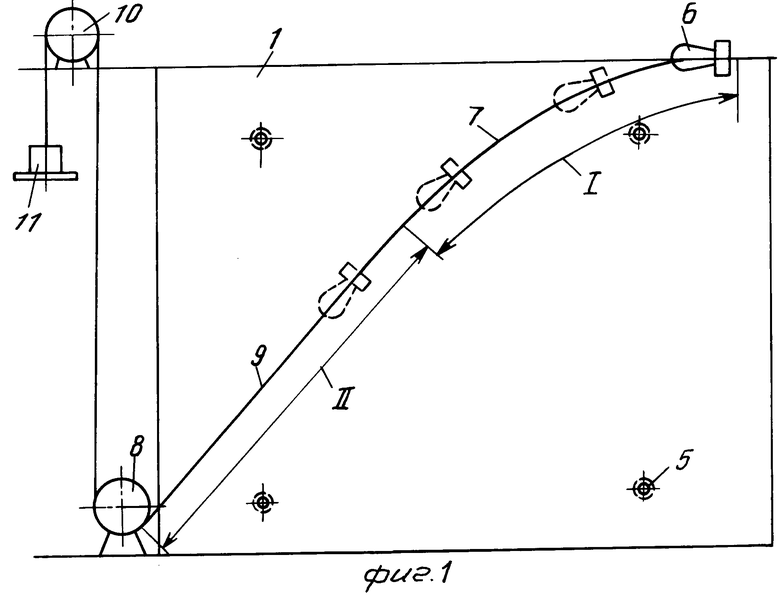
На фиг. 1 изображена схема устройства для осуществления предлагаемого способа, вид сбоку; на фиг. 2 - то же, сверху.
Предлагаемый способ реализуется следующим образом. В баке 1 с водой устанавливают два вертикальных щита 2 и 3, изготовленных из прозрачного материала, например органического стекла. Расстояние между щитами, определяемое длиной втулок 4, крепящихся винтами 5, выбирают равным максимальному поперечному размеру модели 6 тела, погружение которого в воду моделируется. Модель 6 помещают между щитами 2 и 3 и первоначально отпускают ее, регистрируя траекторию 7 погружения модели 6 под воздействием отрицательной плавучести. Модель 6 движется между щитами 2 и 3, которые не позволяют ей отклониться в сторону, имитируя стабилизацию тела по курсу. Прозрачность щитов 2 и 3 позволяет регистрировать траекторию 7 при помощи фото- или киносъемки, а также визуально. На пересечении траектории 7 и дна бака 1 закрепляют блок 8, пропускают через него гибкую связь 9 (например, тросик) и присоединяют один ее конец к модели 6 тела. Создание усилия, имитирующего тягу движителей, осуществляется через гибкую связь 9, для чего ее свободный конец заводят на поверхностный блок 10 и присоединяют к грузу 11.
После этого вновь опускают модель 6 в бак 1 с водой, размещая ее между щитами 2 и 3. На криволинейном участке I траектории 7 не создают в гибкой связи 9 натяжения (исключая действие груза 11, который рукой, а слабину гибкой связи выбирают), а на прямолинейном участке II траектории 7 груз 11 отпускают. При осуществлении способа достигается моделирование процесса погружения, соответствующего натурному процессу, так как на криволинейном участке I траектория погружения модели 6 происходит только под воздействием отрицательной плавучести, а на прямолинейном участке II, когда продольная ось модели 6 и гибкая связь 9 расположены вдоль траектории 7, то есть натяжение в гибкой связи направлено вдоль оси модели, как и тяга маршевых движителей, на модель 6 действует дополнительное усилие и процесс погружения ускоряется.
Эффективность предлагаемого способа определяется тем, что по сравнению со способом-прототипом у этого способа расширяются функциональные возможности, так как моделируется процесс погружения тела в воду с одновременной стабилизацией его по курсу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ моделирования погружения тела в воду | 1990 |
|
SU1711011A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ГЕОМЕТРИЧЕСКИХ И СИЛОВЫХ ПАРАМЕТРОВ ГИБКИХ СВЯЗЕЙ ПОДВОДНЫХ СИСТЕМ | 1991 |
|
RU2076823C1 |
| СТЕНДОВАЯ УСТАНОВКА ДЛЯ МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ ВОДЫ НА ПОДВОДНЫЙ ОБЪЕКТ-ТРУБОПРОВОД | 1991 |
|
RU2010740C1 |
| СПОСОБ СОЗДАНИЯ ДВИЖУЩЕЙ СИЛЫ НА ПОДВОДНОМ ТЕХНИЧЕСКОМ СРЕДСТВЕ | 1997 |
|
RU2155701C2 |
| БУЙКОВАЯ СИСТЕМА | 1991 |
|
RU2029708C1 |
| ПОДВОДНОЕ ТЕХНИЧЕСКОЕ СРЕДСТВО | 1996 |
|
RU2096253C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ГРУНТА | 1990 |
|
RU2028601C1 |
| КОЛЕСНОЕ ПЛАВАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1999 |
|
RU2140363C1 |
| Устройство для моделирования геометрических и силовых параметров располагаемых в воде систем | 1986 |
|
SU1347091A1 |
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1990 |
|
RU2096245C1 |
Использование: в экспериментальной гидродинамике. Сущность изобретения: в баке с водой устанавливают два вертикальных щита 2 и 3, изготовленных из прозрачного материала. Расстояние между щитами, определяемое длиной втулок 4, крепящихся винтами 5, выбирают равным максимальному поперечному размеру модели 6 тела, погружение которого в воду моделируется. Модель 6 помещают между щитами 2 и 3 и первоначально отпускают ее, регистрируя траекторию погружения модели 6 под воздействием отрицательной плавучести. Модель 6 движется между щитами 2 и 3 , которые не позволяют ей отклониться в сторону, имитируя стабилизацию тела по курсу. Прозрачность щитов 2 и 3 позволяет регистрировать траекторию при помощи фото-или киносъемки , а также визуально. На пересечении траектории погружения модели 6 и дна бака закрепляют блок 8, пропускают через него гибкую связь 9 присоединяют один ее конец к модели 6. Усилие, имитирующее тягу движителей, создают посредством гибкой связи 9, для чего ее свободный конец заводят на поверхностный блок 10 и присоединяют к грузу 11. После этого вновь опускают модель 6 в бак с водой, размещая ее между щитами 2 и 3. На криволинейном участке траектории погружения модели 6 тела не создают в гибкой связи 9 натяжения, а на прямолинейном участке этой траектории груз 11 отпускают. При этом усилие в гибкой связи 9 направлено вдоль оси модели 6 как и тяга маршевых движителей. 2 ил.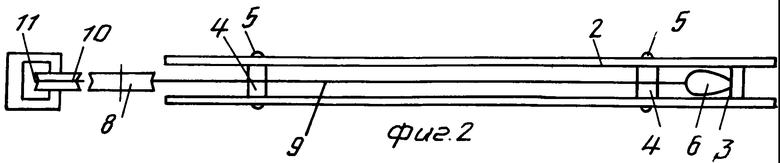
СПОСОБ МОДЕЛИРОВАНИЯ ПОГРУЖЕНИЯ ТЕЛА В ВОДУ, при котором погружают модель тела в бак с водой и создают усилие на модель, дополнительное к ее отрицательной плавучести, при этом усилие на модель передают посредством гибкой связи, проходящей через точку, расположенную на пересечении траектории свободного погружения модели с дном бака, отличающийся тем, что ограничивают отклонение модели посредством двух прозрачных вертикальных щитов, которые размещают с взаимным удалением друг от друга на расстояние, равное максимальному поперечному размеру модели тела.
