Изобретение относится к области морской техники, в частности к подводным аппаратам, несущим приборы для обследования грунта и толщи воды, поиска затонувших устройств, разведки полезных ископаемых, экологических исследований и т.д.
Целью изобретения является повышение эффективности эксплуатации путем повышения стабильности хода по дифференту на малых скоростях буксировки.
Поставленная цель достигается тем, что в подводном буксируемом аппарате, содержащем корпус, носовые и кормовые горизонтальные лопасти, хвостовые вертикальные лопасти, установленные на корпусе симметрично диаметральной плоскости аппарата, а также узел подвеса к буксируемому тросу, установленный на верхней части корпуса между упомянутыми горизонтальными лопастями, каждая горизонтальная лопасть выполнена в виде крыла малого удлинения и установлена на верхней части корпуса подводного буксируемого аппарата, причем носовые лопасти установлены с положительным углом атаки, а кормовые с отрицательным, при этом вертикальные хвостовые лопасти расположены за кормовыми горизонтальными лопастями и связаны с корпусом посредством консолей, выполненных цилиндрической формы.
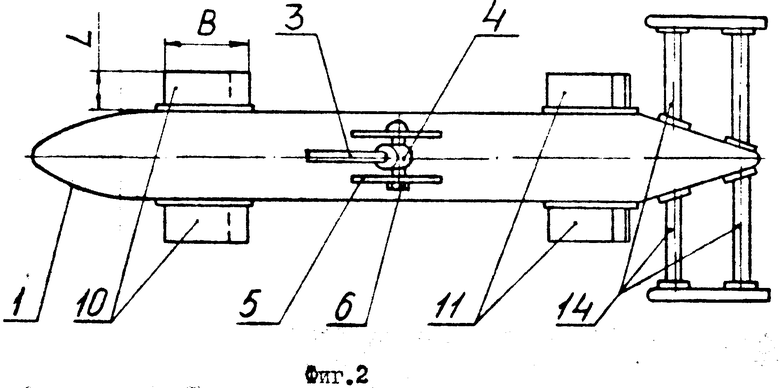
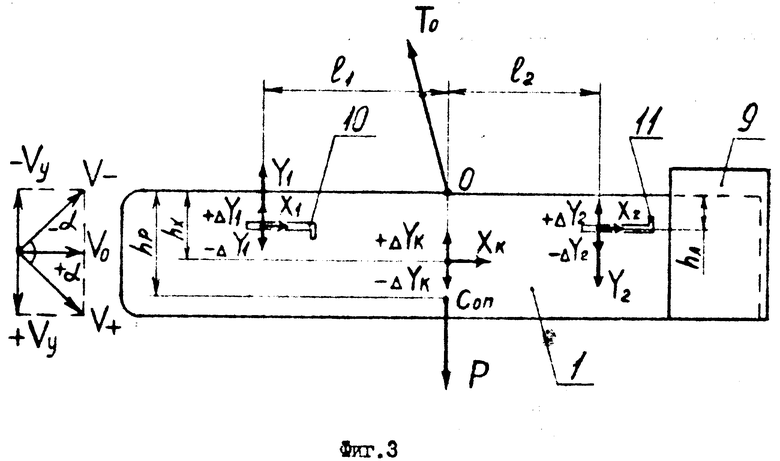
На фиг. 1 изображен подводный буксируемый аппарат вид сбоку; на фиг. 2 вид сверху на фиг. 3 схема приложения внешних сил к подводному аппарату при отсутствии качки и при воздействии на аппарат вертикальной качки судна.
Подводный буксируемый аппарат содержит тяжелый удлиненный корпус 1, узел крепления 2 гибкой связи 3, расположенный сверху корпуса 1 над центром его отрицательной плавучести и примерно над центром площади горизонтальной проекции аппарата.
Узел крепления 2 состоит из концевой капсулы 4, в которой осуществлена силовая заделка гибкой связи 3 и которая размещена между двумя буксирными планками 5, приваренными к корпусу 1, и оси 6, шарнирно соединяющей капсулу 4 с планками 5. Внизу носовой части корпуса 1 закреплен груз 7 для статической балансировки аппарата. Благодаря указанному расположению узла крепления 2 гибкой связи 3 груза 7, а также соответствующему размещению блоков аппаратуры 8 внутри корпуса 1 обеспечивается расположение точки буксировки 0 на одной вертикали с центром отрицательной плавучести аппарата Cоп (т.е. центром приложения равнодействующей силы веса и водоизмещения) и над ним. При этом чем больше расстояние OCоптем больше восстанавливающий статический момент отрицательной плавучести, стремящийся устранять отклонения аппарата по дифференту.
Подводный аппарат имеет стабилизирующее оперение, состоящее из вертикальных хвостовых разнесенных по сторонам корпуса 1 лопастей 9 и горизонтальных лопастей 10 и 11. Последние выдвинуты вперед относительно вертикальных лопастей 9, закреплены в верхней части корпуса 1 и выполнены в виде двух пар несущих поверхностей малого удлинения ( L/B ≃ 0,5, где L размах, В хорда), равноразнесенных по длине корпуса 1 относительно узла крепления 2 гибкой связи 3. При этом горизонтальные лопасти 10 и 11 установлены на стенках корпуса 1 под нулевым углом атаки, имеют равные площади горизонтальной проекции. Передние лопасти 10 выполнены подъемными за счет размещения на их задних кромках уголков интерцепторов 12 ребром вниз, а задние лопасти 11 выполнены углубляющими за счет такого же размещения интерцепторов 13 ребром вверх. В принципе, возможен и другой способ придания горизонтальным лопастям 10 и 11 соответственно подъемных и углубляющих свойств, например, за счет авиационного профиля и/или установки с соответствующим углом атаки. Возможны также иные соотношения площадей горизонтальных проекций этих лопастей и разнесение их по длине корпуса 1 относительно узла крепления 2 гибкой связи 3 обратно пропорционально отношению этих площадей.
Вертикальные лопасти 9 закреплены на фланцах внешних концов четырех гидродинамически нейтральных консолей 14, у которых нейтральность обеспечивается малой площадью и круговой формой поперечного сечения, при которой величина нагрузки мала и не зависит от угла атаки аппарата. Фланцы внутренних концов консолей 14, в свою очередь, закреплены на стенках корпуса 1 в его кормовой зоне.
В отсутствие качки судна-буксировщика в процессе буксировки подводного аппарата на него набегает встречный поток с постоянной горизонтальной скоростью V0 (фиг. 3). Возникающая при этом сила лобового сопротивления корпуса Xк линия действия которой отстоит от точки буксировки 0 (в центре оси 6) на высоту hхсоздает момент кабрирования, стремящийся дифферентовать аппарат на нос. Однако на выдвинутых вперед относительно вертикальных хвостовых лопастей 9 горизонтальных лопастях 10 и 11, разнесенных по длине корпуса 1 относительно оси 6 узла крепления 2 гибкой связи 3 соответственно на расстояния l1 вперед и l2 назад, возникают соответственно подъемная Y1 и углубляющая Y2 силы, создающие общий компенсирующий момент, противодействующий кабрирующему моменту сопротивления аппарата. При этом влиянием сил сопротивления X1 и X2 горизонтальных лопастей 10 и 11 можно пренебречь вследствие того, что линия их действия расположена в верхней части корпуса 1 на малом расстоянии hл от точки буксировки 0. Также вследствие малости можно не учитывать влияние вертикальных лопастей 9, установленных на гидродинамически нейтральных консолях 14. Таким образом, гидродинамические моменты скомпенсированы и под действием восстанавливающего момента силы отрицательной плавучести P, центр приложения которой Cоп расположен под точкой буксировки 0, аппарат сохраняет нулевой дифферент. При этом внешние силы, воздействующие на аппарат: Xк, P, Y1 X1 Y2, X2 уравновешиваются силой реакции T0 гибкой связи 3, приложенной в точке буксировки 0 и мало отклоненной от вертикали в случае тяжелого корпуса 1.
В условиях волнения моря и качки судна-буксировщика возмущения, распространяющиеся вдоль оси гибкой связи 3 от судна к аппарату, достигают последнего и вызывают его перемещения преимущественно в направлении силы T0 (практически по вертикали). Переменные скорости (±Vy) и ускорения таких перемещений, в свою очередь, приводят к появлению переменных динамических нагрузок на аппарат, приложенных как к корпусу 1 ( (±ΔYk) так и к горизонтальным лопастям 10 и 11 оперения (±ΔY1 и ±ΔY2)
Тем не менее и в динамике сохраняются условия балансировки моментов сил и стабильности дифферента аппарата благодаря тому, что точка буксировки 0 располагается над центром отрицательной плавучести Соп и примерно над центром площади горизонтальной проекции аппарата, горизонтальные лопасти 10 и 11 стабилизирующего оперения выдвинуты вперед относительно вертикальных хвостовых лопастей 9, расположены в верхней части корпуса 1 и выполнены в виде двух пар несущих поверхностей одинаковой площади, равно-разнесенных относительно узла крепления 2 гибкой связи 3 /точки буксировки 0/ соответственно вперед и назад, а вертикальные лопасти 9 закреплены на гидродинамически нейтральных консолях 14.
Указанная динамическая балансировка аппарата с ростом амплитуд вертикальных перемещений сохраняет свой характер до тех пор, пока при росте углов атаки ±α и результирующей скорости V± не начнется срыв потока с горизонтальных лопастей 10 и 11. Однако благодаря тому, что горизонтальные лопасти 10 и 11 стабилизирующего оперения выполнены в виде несущих поверхностей малого удлинения, выдвинуты вперед относительно вертикальных хвостовых (разнесенных по сторонам корпуса 1) лопастей 9 и поэтому не имеют концевых шайб, диапазон углов безотрывного обтекания горизонтальных лопастей 10 и 11 стабилизирующего оперения существенно возрастает. Последнее способствует тому, что при эксплуатации аппарата может быть повышена допускаемая степень волнения моря при заданном диапазоне скоростей буксировки или расширен диапазон допускаемых скоростей буксировки в сторону малых скоростей при заданном волнении моря.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1995 |
|
RU2096246C1 |
| БУКСИРУЕМЫЙ НОСИТЕЛЬ ДЛЯ ГИДРОНАВТОВ | 1993 |
|
RU2070130C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНТОМ БУКСИРУЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2017 |
|
RU2657701C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВОДНОГО ПЛАНЕРА | 2018 |
|
RU2680678C1 |
| ОПУСКНОЕ ПОДВОДНОЕ УСТРОЙСТВО | 2013 |
|
RU2543118C2 |
| НАДВОДНОЕ ОДНОКОРПУСНОЕ ВОДОИЗМЕЩАЮЩЕЕ БЫСТРОХОДНОЕ СУДНО | 1999 |
|
RU2155693C1 |
| УДАРНО-БОЕВОЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2778159C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| МНОГОЭЛЕМЕНТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2769000C1 |
| БУКСИРУЕМОЕ УСТРОЙСТВО | 1993 |
|
RU2061619C1 |
Сущность изобретения: подводный буксируемый аппарат содержит корпус, носовые и кормовые горизонтальные лопасти, выполненные в виде крыльев малого удлинения и установленные на верхней части корпуса, вертикальные хвостовые лопасти, расположенные за кормовыми горизонтальными лопастями и связанные с корпусом посредством консолей цилиндрический формы, а также узел подвеса к буксирному тросу, установленный на верхней части корпуса между кормовыми и носовыми горизонтальными лопастями. 3 ил.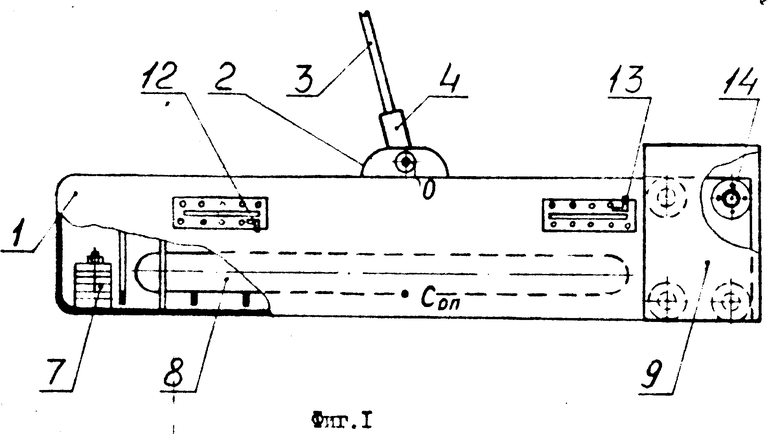
Подводный буксируемый аппарат, содержащий корпус, носовые и кормовые горизонтальные лопасти, вертикальные хвостовые лопасти, установленные на корпусе симметрично диаметральной плоскости аппарата, а также узел подвеса к буксирному тросу, установленный на верхней части корпуса между упомянутыми горизонтальными лопастями, отличающийся тем, что, с целью повышения эффективности в эксплуатации путем повышения стабильности хода по дифференту на малых скоростях буксировки, каждая горизонтальная лопасть выполнена в виде крыла малого удлинения и установлена на верхней части корпуса, причем носовые лопасти установлены с положительным углом атаки, а кормовые с отрицательным, при этом вертикальные хвостовые лопасти расположены за кормовыми горизонтальными лопастями и связаны с корпусом посредством консолей, выполненных цилиндрической формы.
