Изобретение относится к подводной технике и предназначено для обеспечения обнаружения объекта под водой, преимущественно на больших глубинах, путем установления механической связи подводного объекта с водной поверхностью. Оно может быть использовано, например, в составе спасательных средств при аварии подводного объекта.
Известна система спасательного буя, содержащая буй, закрепленный на подводном аппарате с возможностью его отделения от аппарата посредством исполнительного механизма, гибкую связь в виде каната положительной плавучести, соединенную одним концом с буем, а другим - с корпусом подводного аппарата, а также контейнер на борту подводного аппарата для укладки в него гибкой связи с возможностью ее выхода из контейнера после отделения буя от подводного аппарата и всплытия его на поверхность [1].
Данная система нерациональна: использование контейнера для укладки гибкой связи большой длины (несколько километров) приводит к дополнительному увеличению габаритов и массы системы и, следовательно, габаритов и массы подводного аппарата; неэффективно используется плавучесть гибкой связи для создания оптимальных условий всплытия буя с присоединенной к нему протяженной гибкой связью, так как часть гибкой связи, обладающей положительной плавучестью, в процессе всплытия буя остается на подводном аппарате и не участвует в создании подъемной (архимедовой) силы буя; не исключается возможность запутывания и перехлеста гибкой связи при ее неорганизованном выходе из контейнера, что снижает надежность системы.
Наиболее близким техническим решением к изобретению является буйковая система (речной буй), содержащая буй (поплавок), на внешнюю цилиндрическую поверхность которого в один слой намотана гибкая связь отрицательной плавучести (буйреп), соединенная одним концом с буем, а другим - с подводным объектом (якорем в виде конического основания), на котором закреплен буй с возможностью его отделения от подводного объекта посредством исполнительного механизма [2].
Так как подъем буя с намотанной на него гибкой связью отрицательной плавучести осуществляется исключительно за счет его собственной подъемной (архимедовой) силы, то с увеличением рабочей глубины буя для компенсации соответственно увеличивающегося подводного веса гибкой связи его габариты а следовательно, и масса возрастают. Кроме того, в конструкцию буя не заложена возможность с увеличением рабочей глубины многослойной намотки на него гибкой связи с обеспечением при этом надежного разматывания ее в процессе всплытия буя.
Указанные недостатки буйковой системы ограничивают ее эксплуатационные возможности только малыми глубинами (первые десятки метров) и применением на стационарных (неподвижных) подводных объектах, а также снижают ее эффективность.
Цель изобретения - расширение эксплуатационных возможностей и повышение эффективности буйковой системы.
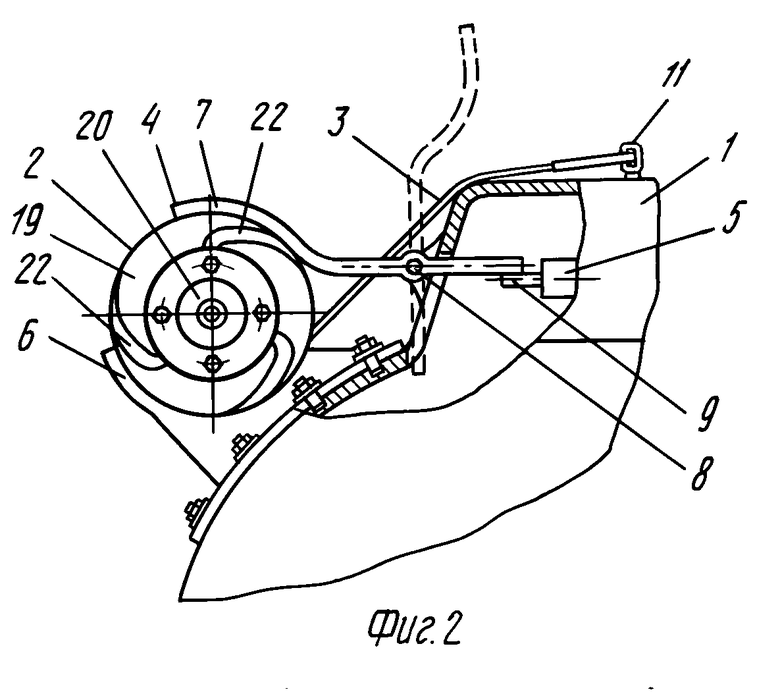
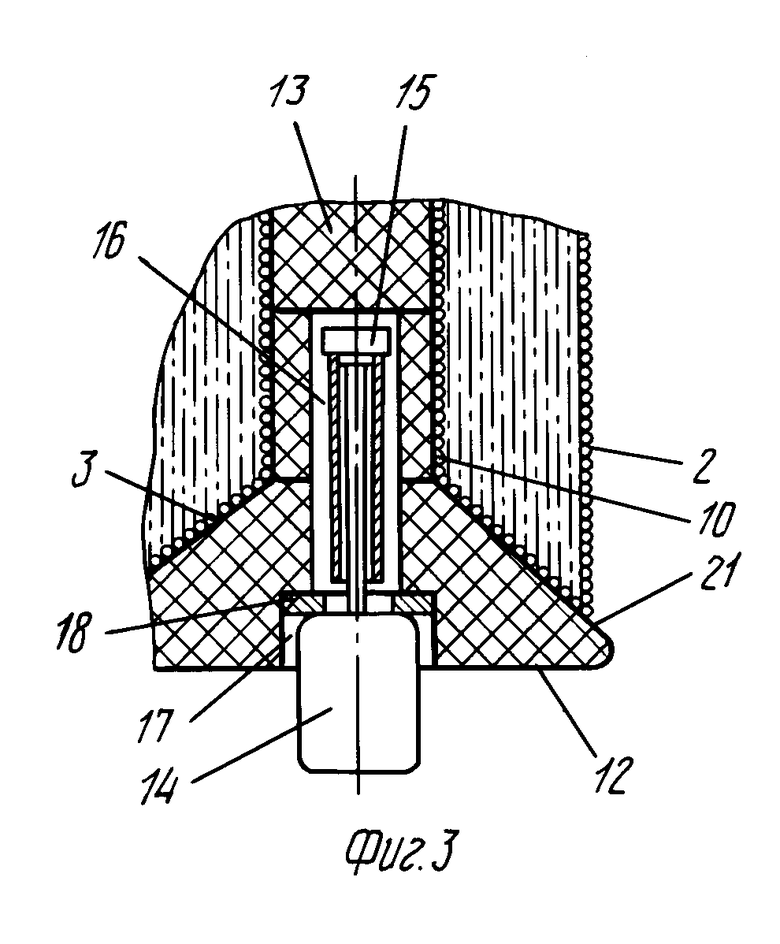
На фиг.1 показан отдельно буй с намотанной на катушку гибкой связью; на фиг. 2 - буйковая система в сборе; на фиг.3 - вариант присоединения груза к торцу катушки путем его подвески (груз и элементы телескопической подвески показаны в собранном виде, уложенными в гнезда катушки).
Буйковая система монтируется на подводном объекте 1, например подводном аппарате (фиг.2), и содержит буй 2, гибкую связь (канат, кабель и т.п.) 3, обладающую положительной плавучестью, присоединенную одним концом к бую 2, а другим - к корпусу подводного объекта 1, и исполнительный механизм 4 для фиксации буя 2 на корпусе подводного объекта 1. Исполнительный механизм 4 приводится в действие для отсоединения буя 2 от подводного объекта 1 приводом 5, связанным, например, энергетически с блоками управления и питания (не показаны).
Буй 2 устанавливается на подводном объекте 1 в произвольном, исходя из условий компоновки, положении. Для примера на фиг.2 показана установка буя 2 в горизонтальном положении, обеспечивающем наименьшее лобовое сопротивление подводному объекту 1 при его движении. Буй 2 уложен на передний и задний (не показан) ложементы 6, которые могут быть подпружинены для создания первоначального толчкового импульса в момент отделения буя 2 от подводного объекта 1. Исполнительный механизм 4 при этом варианте выполнения буйковой системы может быть, например, выполнен в виде переднего и заднего (не показан) рычагов 7, установленных на поворотной оси 8. В качестве привода 5 исполнительного механизма 4 может быть использован, например, соленоид в погружном исполнении, втягиваемый сердечник 9 которого является упором, фиксирующим рычаги 7 в рабочем положении. Срабатывание исполнительного механизма 4, например в аварийной ситуации, может производиться автоматически при обесточивании системы электроснабжения подводного объекта 1 или по гидроакустическому сигналу с надводного судна с задействованием блока управления, снабженного акустическим приемником, а также по команде с борта подводного объекта 1 (в обитаемом исполнении) и другими способами.
Буй 2 выполнен в виде катушки 10, на которую послойно виток к витку намотана гибкая связь 3, свободный конец которой после намотки верхнего слоя прикреплен, например, как показано на фиг.2, к рымболту 11. Катушка 10 может быть целиком выполнена из материала, сохраняющего положительную плавучесть при рабочих глубинах подводного объекта 1.
Ее основу может также составлять корпус 12, заполненный внутри плавучим материалом 13, например синтактиком, или выполненный в виде герметичной прочной емкости, состоящей из отдельных камер (представление о такой конструкции дает фиг.1, если удалить заполнитель 13).
При необходимости использования буйковой системы на подводных объектах с большими рабочими глубинами (несколько километров) и относительно большом времени всплытия буя 2, измеряемом десятками минут, возникает целесообразность дополнительно повысить эффективность буя 2 за счет улучшения его гидродинамики: обеспечения всплытия в вертикальном положении и придания ему при этом наиболее обтекаемой формы. Для этого торец катушки 10 буя 2 со стороны выхода конца намотанной на нее гибкой связи 3 огружен, например, путем установки съемного груза 14 непосредственно на торец (фиг.1) или подвески его к нему на некотором расстоянии (фиг.3), а также увеличения веса нижних элементов корпуса катушки 10. При погружении катушки 10 обеспечивается положительная остаточная плавучесть и разнесение центров масс (Ц.М.) и величины (Ц.В.) строго по ее оси. При втором варианте подвески груза 14 (на некотором расстоянии от торца катушки 10) по сравнению с первым и третьим вариантами достигается при одной и той же величине груза 14 большая метацентрическая высота Но. Это обеспечивает, несмотря на некоторую относительную сложность второго варианта по сравнению с первым и третьим, лучшую остойчивость буя 2 как при всплытии, так и на поверхности в условиях волнения и ветровой нагрузки. Для предотвращения возможности зацепа груза 14 и подвески 15 при отделении буя от подводного объекта 1, а также для улучшения компоновки буя 2 в торце катушки 10 по ее оси выполнены верхнее 16 и нижнее 17 гнезда для укладки в них соответственно подвески 15 и груза 14.
Подвеска 15 может быть выполнена гибкой, в виде стержня или телескопической (последний вариант показан на фиг.3 в собранном виде). При принятии буем 2 положения, близкого к вертикальному, груз 14 с подвеской 15 выпадают под действием силы тяжести из своих гнезд 16 и 17 и задерживаются ограничителем 18, выполненным в виде закрепленной на корпусе пластины с отверстием для пропуска только телескопической части подвески 15.
При обеспечении вертикального всплытия буя 2 верхнему торцу катушки 10 придается обтекаемая форма или на нем устанавливается отдельная, например, шарообразная головная часть 19, обладающая положительной плавучестью, для размещения в ней автономного сигнального устройства 20, например светорадиомаяка и (или) передающей спутниковой антенны. Автономное сигнальное устройство 20 включается автоматически при достижении буем 2 поверхности воды. В целом буй 2 с вертикальной ориентацией при всплытии по своей форме представляет собой вытянутое обтекаемое тело вращения. Для создания оптимальных условий для схода гибкого элемента 3 с катушки 10 внутренняя поверхность ее нижней боковины 21 выполнена конусной, а край ее закруглен и имеет радиус, больший минимально допустимого радиуса изгиба гибкого элемента 3. Головная часть 19 для усиления эффекта путем обеспечения принудительного вращения буя 2 может быть снабжена оперением из скошенных к оси буя 2 пластин 22 в направлении, обеспечивающем вращение буя 2 вокруг его оси, противоположное направлению схода с катушки 10 гибкой связи 3. Пластины 22 могут быть выполнены плоскими или спрофилированными в виде лопастей.
Буйковая система работает следующим образом.
При заданных условиях, например при аварии подводного объекта 1 или иной запрограммированной ситуации, срабатывает исполнительный механизм 4 и освобождает буй 2, который отделяется от подводного объекта 1 под действием подъемной (выталкивающей) силы и при наличии соответствующего приспособления, толчкового импульса. При этом, в связи с тем, что гибкая связь 3 обладает положительной плавучестью, подъемная сила является результирующей архимедовых сил самого буя 2 и намотанной на него гибкой связи 3. В процессе подъема буя 2 на поверхность и разматывания гибкой связи 3 подъемная сила изменяется от максимальной величины, соответствующей наиболее ответственному моменту - отделению буя 2 от подводного объекта 1 на максимальной глубине, до минимальной величины, достигаемой при окончании работы - всплытии буя 2 на поверхность воды. Таким образом обеспечивается оптимизация и эффективность работы буйковой системы.
Буй 2, если не произведено погружение торца катушки 10, т.е. метацентрическая высота Но приблизительно равна нулю, всплывает на поверхность, вращаясь вокруг своей оси, занимающей относительно горизонтальную ориентацию в пространстве и совершающей при этом под воздействием разматывающейся с катушки 10 гибкой связи 3 и гидравлического сопротивления угловые колебания в вертикальной и горизонтальной плоскости относительно Ц.В. Угловая скорость вращения катушки 10 при этом автоматически согласовывается со скоростью ее всплытия.
В случае погружения торца катушки 10 грузом 14 (в основном при использовании буйковой системы на больших глубинах) буй 2 после отделения от подводного объекта 1 (при любом произвольном расположении на нем) занимает при всплытии вертикально ориентированное положение. Сход гибкой связи 3 с катушки 10 при этом происходит аналогично сходу лесы с безынерционной спининговой катушки. Причем за счет вращения буя 2 вокруг своей вертикальной оси и колебаний его хвостовой части (нижней боковины 21) относительно Ц. В. под воздействием сбегающей с нее гибкой связи 3 этот процесс облегчается.
Для дополнительного повышения эффективности процесса равномерного сброса гибкой связи 3 с катушки 10 (за счет улучшения условий преодолений сил трения и сцепления в ее выходном витке) буй 2 принудительно закручивается в противоположном направлении схода гибкой связи 3 с помощью оперения из пластин 22. Это также предотвращает скручивание гибкой связи 3, что характерно, например, исходя из аналогии принципов работы, для безынерционных спининговых катушек, находящихся в неподвижном относительно удилища положении.
При достижении поверхности буем 2 автоматически срабатывает сигнальное устройство 20. После обнаружения буя 2 с надводного судна в случае необходимости устанавливают с подводным объектом 1 через буй 2 механическую, электрическую и (или) иную связь (в зависимости от использования в системе вида гибкой связи 3) и проводят необходимые операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАВЕДЕНИЯ ПОДЪЕМНЫХ КАНАТОВ И УСТРОЙСТВО ДЛЯ ПОДЪЕМА ПОДВОДНОГО ОБЪЕКТА | 1990 |
|
RU2009067C1 |
| УСТРОЙСТВО ДЛЯ ГЛУБОКОВОДНОЙ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ | 1989 |
|
SU1739704A1 |
| СПОСОБ ПЕРЕРАБОТКИ ПОДВОДНЫХ ЖЕЛЕЗОМАРГАНЦЕВЫХ РУД | 2001 |
|
RU2184163C1 |
| БУЙКОВАЯ СТАНЦИЯ ДЛЯ ГИДРОФИЗИЧЕСКИХ ИЗМЕРЕНИЙ | 1995 |
|
RU2090431C1 |
| УСТАНОВКА ДЛЯ ПОДЪЕМА ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА ОКЕАНА | 1989 |
|
SU1837668A1 |
| ЦЕНТРОБЕЖНЫЙ КОНЦЕНТРАТОР | 1998 |
|
RU2136373C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ШАХТНЫХ ВЕНТИЛЯТОРОВ | 1989 |
|
RU2008641C1 |
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1987 |
|
SU1791757A2 |
| СПОСОБ НАВЕДЕНИЯ ЗАБОЯ ОДНОЙ СКВАЖИНЫ НА СТВОЛ ДРУГОЙ СКВАЖИНЫ | 1989 |
|
SU1626908A1 |
| МЕЛЬНИЦА ШАРОВАЯ ЛАБОРАТОРНАЯ | 1989 |
|
SU1835697A1 |
Использование: в средствах обнаружения местонахождения объектов под водой. Сущность изобретения: система содержит буй 2, установленный на подвижном объекте посредством держателя с приводом его раскрытия, и катушку 10 с намотанным на нее гибким элементом 3 (канат, кабель и т.п.), один из концов которого прикреплен к бую 2, а другой связан с подводным объектом, катушка 10 выполнена за одно целое с буем 2, а гибкий элемент 3 имеет положительную плавучесть. Один из торцов катушки 10 со стороны выхода конца намотанного на нее гибкого элемента 3 снабжен грузом 14, при этом центры масс (Ц.М) и величины (Ц.В.) разнесены по оси буя 2 для обеспечения вертикальной его ориентации при всплытии. Груз 14 присоединен к указанному торцу катушки 10 посредством подвески. Катушка 10 снабжена обтекаемой головной частью 19 с оперением из пластин 22, скошенных к оси буя 2 в направлении, обеспечивающем его вращение при всплытии, противоположное направлению схода с катушки 10 гибкого элемента 3. 3 з.п. ф-лы, 3 ил.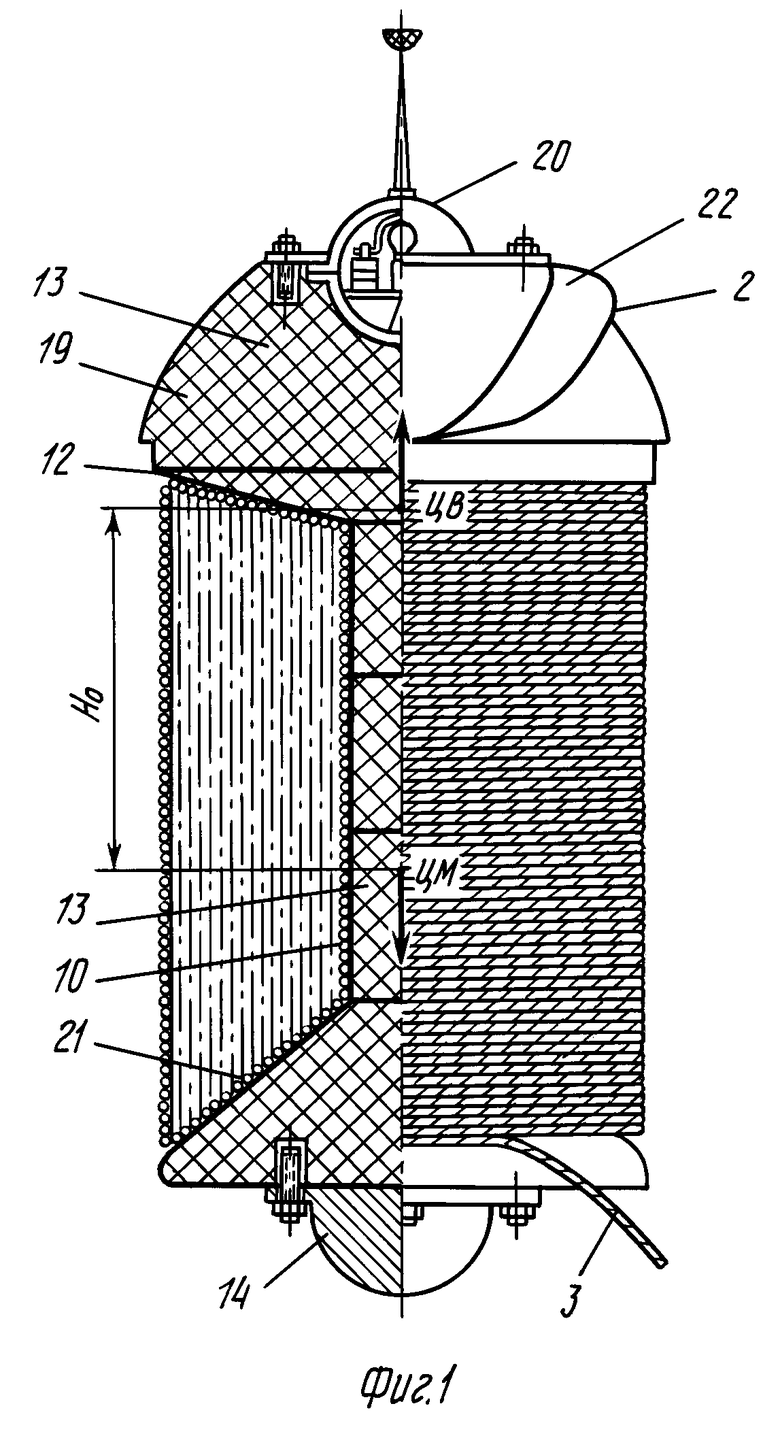
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Речной буй | 1983 |
|
SU1169878A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
