Изобретение относится к технике для бурения глубоких скважин и предназначено для применения в качестве приводного модуля в конструкциях скважинных устройств, управляемых дистанционно с поверхности, и может использоваться в наземных устройствах.
Известно устройство, содержащее в качестве приводного модуля близкий по технической сущности механизм, включающий корпус с уплотнениями, шток, установленный с возможностью продольного перемещения, канавку зигзагообразной формы из прямых и наклонных пазов, выполненную на внутренней поверхности корпуса, кольцо, установленное с возможностью вращения вокруг оси корпуса, пальцы, установленные на кольце и взаимодействующие с пазами канавки, шлицевое соединение штока с корпусом [1].
Недостатком известного механизма является то, что форма канавки в условиях вибраций и крутильных колебаний не обеспечивает надежного перехода пальцев из одного паза в следующий, возможно повторное попадание в тот же паз или в момент прохождения средней части канавки перескакивание через паз, что приводит к ненадежности работы всего устройства.
Известно устройство - управляемый отклонитель, содержащее в качестве приводного модуля наиболее близкий по технической сущности механизм, включающее корпус, исполнительный механизм, установленный в корпусе с возможностью продольного перемещения и поворота, подвижный производный элемент с канавкой на наружной поверхности, образованный продольными и наклонными участками, служащий для привода исполнительного механизма, возвратный элемент, взаимодействующий с приводным элементом, направляющие элементы в виде пальцев со свободными концами, размещенными в канавке подвижного элемента, подвижное соединение и узел привода [2].
Недостатком известного механизма является то, что форма канавки и фиксация направляющих элементов относительно корпуса не обеспечивают надежного переключения механизма из одного положения в другое.
Целью изобретения является повышение надежности.
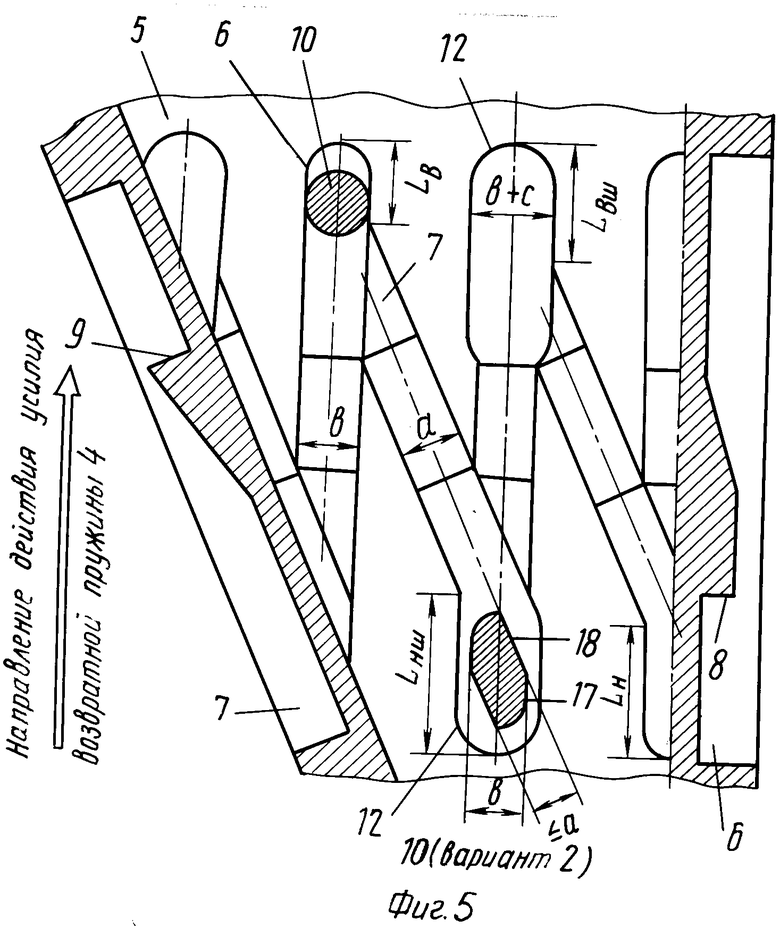
Достигается это тем, что механизм шагового привода вращения для управляемых скважинных устройств, включающий корпус, установленный в корпусе с возможностью продольного перемещения и поворота подвижный элемент с канавкой на наружной поверхности, образованной продольными и наклонными участками, возвратный элемент и направляющие элементы со свободными концами, размещенными в канавке подвижного элемента, подвижное соединение и узел привода имеет канавку, выполненную с глубиной максимальной в верхней и нижней частях, плавно уменьшающейся в направлении действия усилия возвратного элемента на наклонном участке и в противоположном направлении на продольном участке, со ступенями в местах перехода продольного участка в наклонный с противоположной действию усилия возвратного элемента стороны, и наклонного участка в продольный со стороны действия усилия возвратного элемента. А также тем, что продольные участки выполнены удлиненными в зоне максимальной глубины. А также тем, что по крайней мере один из продольных участков имеет расширение в зонах максимальной глубины или на всем протяжении. А также тем, что в корпусе выполнены радиальные глухие отверстия, а направляющие элементы - в виде подпружиненных пальцев установлены с возможностью перемещения в последних. Или тем, что механизм снабжен связанной с корпусом силовой втулкой с прорезями, направляющие элементы установлены в последних и выполнены в виде рычагов с продольными контактными поверхностями, расположенными на расстоянии, равном ширине продольного участка канавки и наклонными контактными поверхностями, расположенными на расстоянии не более ширины наклонного участка канавки.
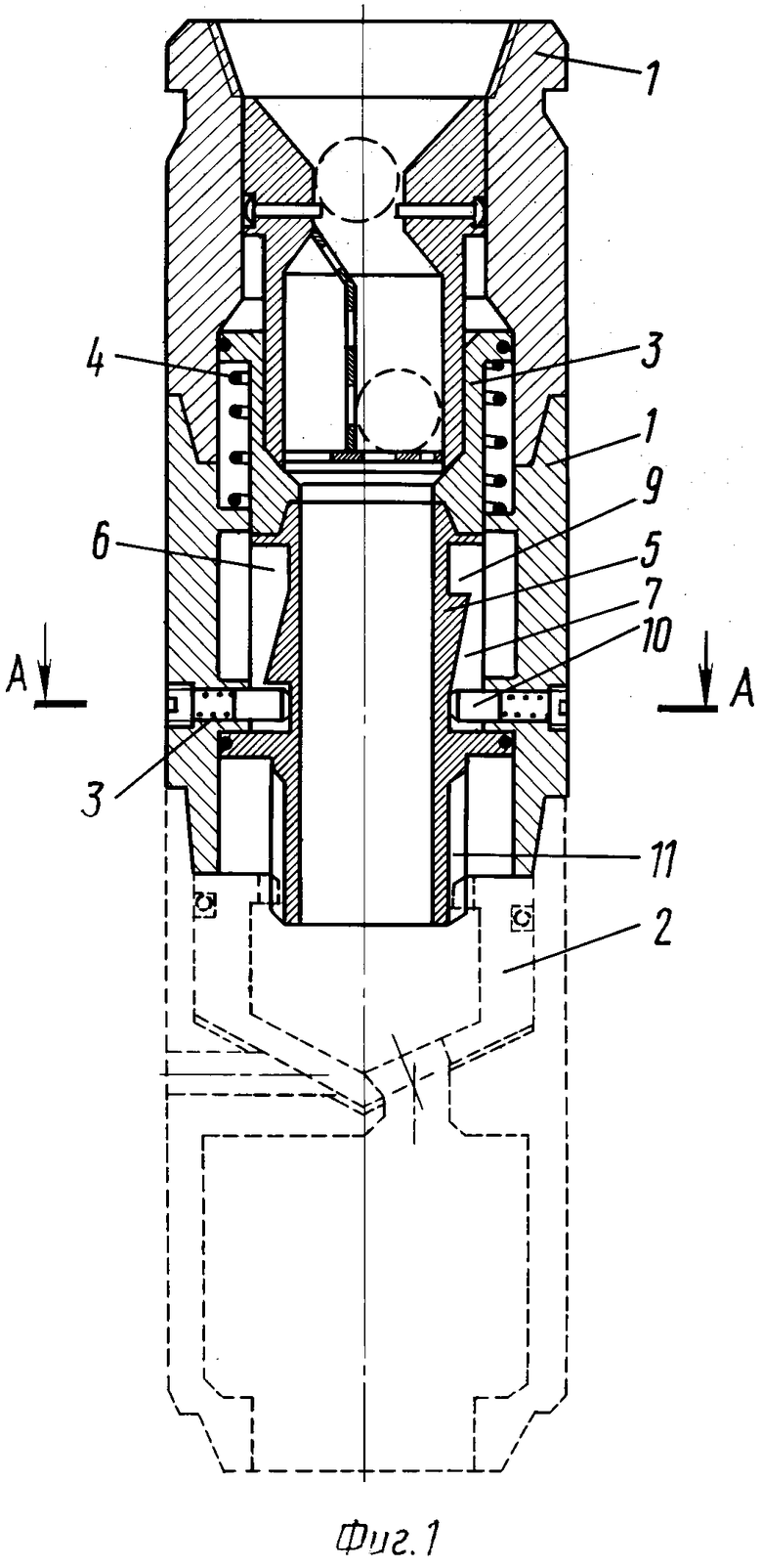
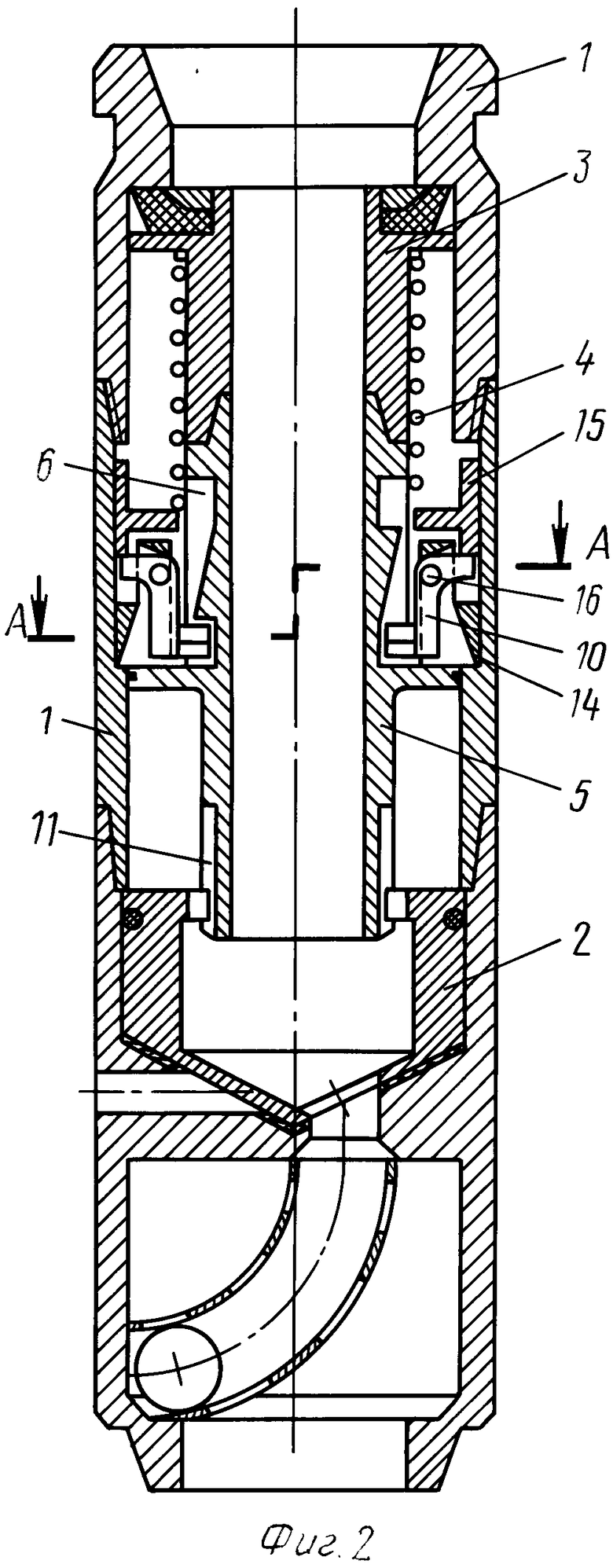
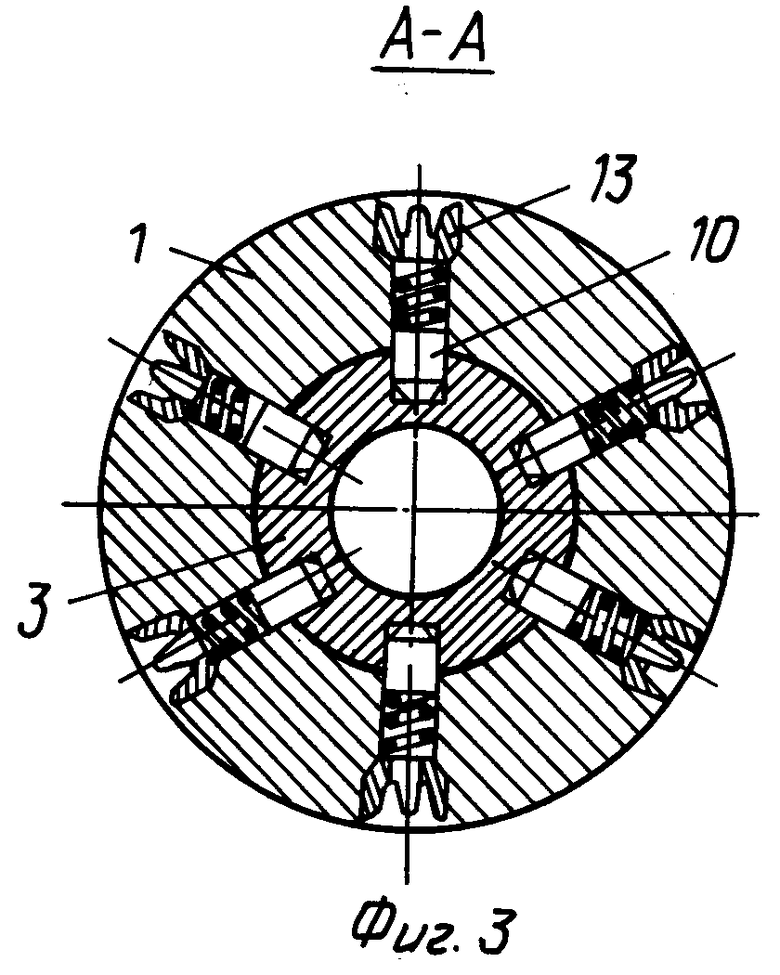
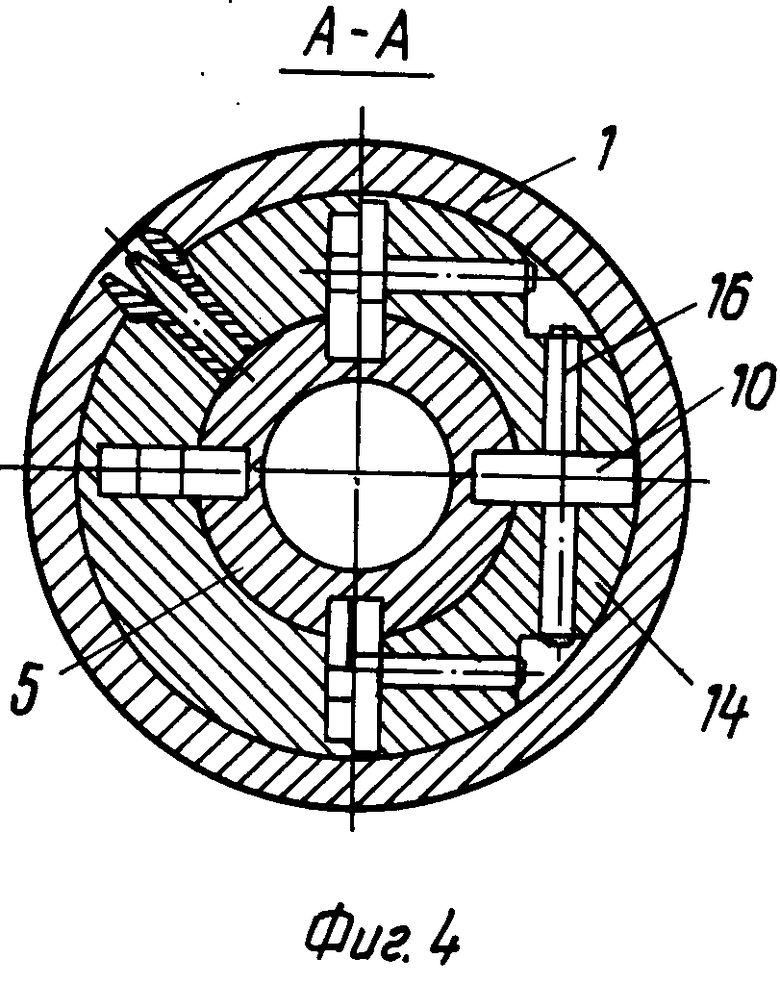
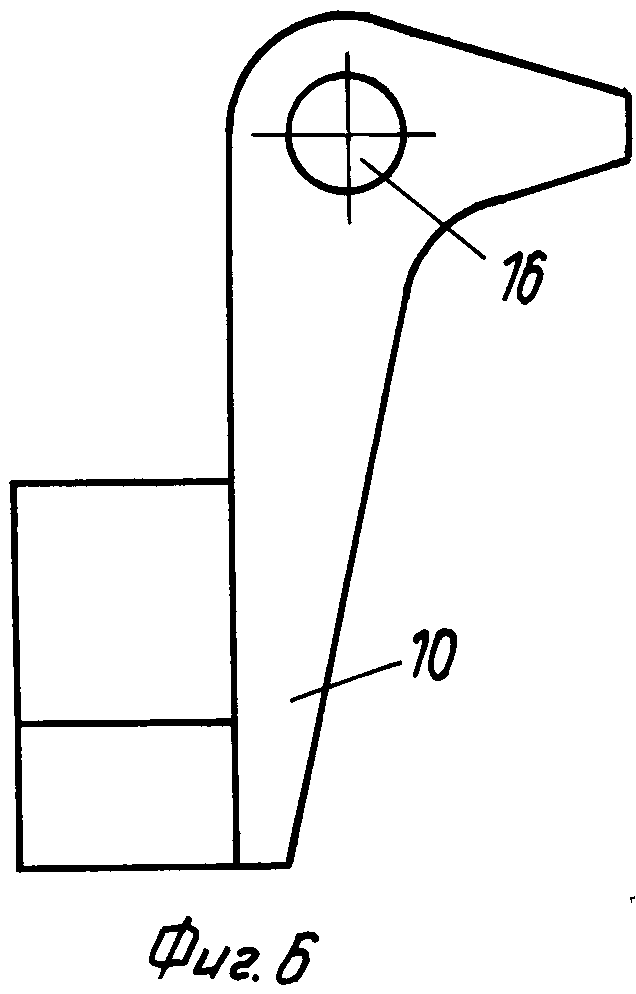
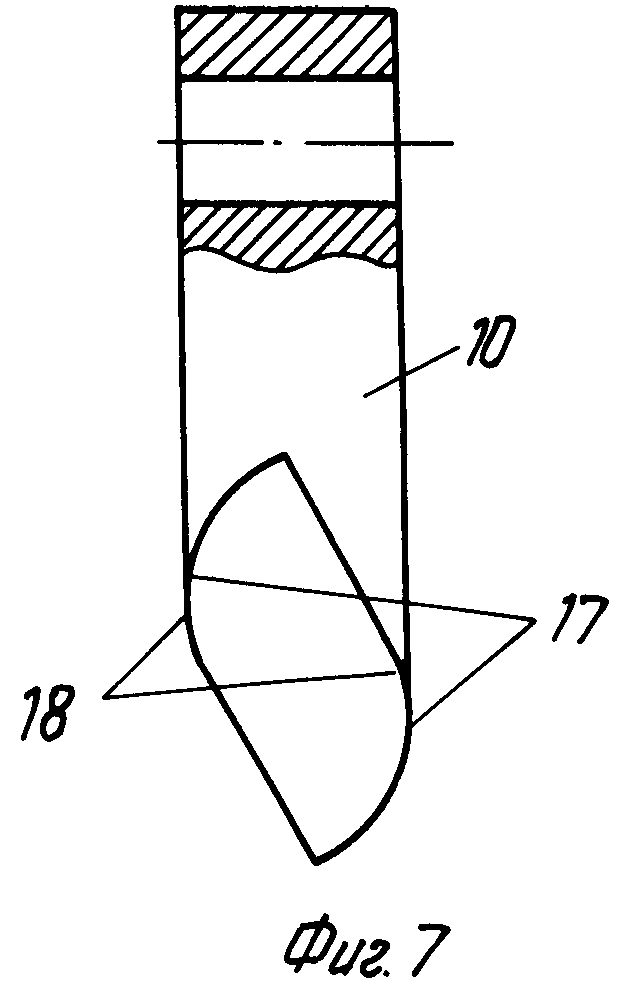
На фиг. 1 изображен разрез первого варианта механизма; на фиг. 2 - разрез второго варианта; на фиг. 3 - сечение по А-А на фиг. 1 (первый вариант); на фиг. 4 - сечение по А-А на фиг. 1 (второй вариант); на фиг. 5 - фрагмент развертки канавки с сечениями участков; на фиг. 6 - направляющий элемент в виде рычага; на фиг. 7 - контактные поверхности рычага.
Механизм шагового привода вращения для управляемых скважинных устройств содержит корпус 1, исполнительный механизм 2, подвижный приводной элемент 3, установленный в корпусе 1 с возможностью продольного перемещения и поворота и предназначенный для привода исполнительного механизма 2, возвратный элемент в виде пружины 4, взаимодействующей с приводным элементом 3, наружную цилиндрическую поверхность с канавкой, имеющей переменную глубину, продольные участки 6, наклонные участки 7, ступеньки 8 и 9 на две канавки, взаимодействующие с участками 6 и 7, направляющие элементы 10 со свободными концами, размещенными в канавке, и подпружиненные относительно корпуса 1 для постоянного контакта со ступенчатым дном зигзагообразной канавки, подвижное соединение 11 приводного элемента 3 с исполнительным механизмом 2. При этом цилиндрическая поверхность 5 жестко связана с приводным элементом 3, прямые продольные участки 6 имеют максимальную глубину в части, расположенной в направлении действия усилия возвратной пружины 4, затем плавное уменьшение глубины в средней части, и резкое увеличение глубины в конце продольного участка 6, образующее ступеньку 8 в месте перехода прямого продольного участка 6 в наклонный, имеющий максимальную глубину в части, противоположной направлению действия усилия возвратной пружины 4, затем плавное уменьшение глубины в средней части наклонного участка 7 и резкое увеличение глубины в конце наклонного участка 7, образующее ступеньку 9 в месте перехода. В местах перехода одних пазов в другие выполнены продольные удлинения 12 с максимальной глубиной, а по крайней мере один продольный участок 6 в местах удлинения 12 или на всем протяжении имеет расширение, т. е. увеличение ширины. Исполнительный механизм 2 выполнен в виде, например, золотникового поворотного клапана с каналами.
В первом варианте механизма в корпусе 1 с внутренней стороны выполнены радиальные глухие отверстия 13, направляющие элементы 10 выполнены в виде пальцев, расположенных с возможностью продольного перемещения в радиальных отверстиях 13 и подпружиненных относительно корпуса 1.
Во втором варианте механизма в корпусе 1 установлена связанная с ним силовая втулка 14, имеющая прорези для размещения направляющих элементов 10 и нажимная втулка 15, взаимодействующая с направляющими элементами 10 и с возвратной пружиной 4. При этом направляющие элементы 10 выполнены в виде рычагов (фиг. 2) с осями 16 вращения, перпендикулярными оси корпуса 1. Рычаги размещены в прорезях силовой втулки 14 и имеют прямые контактные поверхности 17, расположенные на расстоянии друг от друга, равном ширине прямого продольного участка 6 канавки, и наклонные контактные поверхности 18, расположенные на расстоянии не более ширины наклонного участка 7. С подвижным приводным элементом 3 связаны кинематический узел 19 привода.
Механизм шагового привода вращения для управляемых скважинных устройств работает следующим образом.
При воздействии на узел привода 19 и связанный с ним подвижный приводной элемент 3 любым известным путем - давлением бурового раствора, сбросом шара, нажатием бурильной колонной и т. п. он движется вдоль корпуса 1, преодолевая сопротивление возвратной пружины 4. При этом направляющие элементы 10 взаимодействуют с боковой поверхностью винтовых наклонных участков 7, вынуждая поворачиваться приводной элемент 3 на угол θ =  , где n - число пар участков. Одновременно направляющие элементы 10 скользят по наклонному дну паза 7, преодолевая сопротивление взаимодействующей с ними пружины до ступеньки 9. После прохождения ступеньки 9 направляющие элементы 10 под действием пружины защелкиваются в глубокой начальной части прямого участка 6, фиксируя приводной элемент 3 и соответственно исполнительный механизм 2 от поворота. После снятия воздействия приводной элемент 3 под действием возвратной пружины 4 возвращается в исходное положение. При этом направляющие элементы 10, взаимодействуя с боковыми поверхностями прямых продольных участков 6, препятствуют вращению приводного элемента 3 и соответственно исполнительного механизма, а взаимодействуя с наклонным дном участка 6, они скользят до ступеньки 8, после чего защелкиваются в начале следующего винтового наклонного участка 7. Повторному попаданию направляющих элементов 10 в один и тот же участок канавки препятствуют ступеньки 8 и 9, а перескакивание через один - боковые стенки, форма и взаиморасположение участков 6 и 7. При повторном воздействии на узел 19 привода и связанный с ним приводной элемент 3 цикл повторяется, элементы механизма взаимодействуют аналогичным образом, приводной элемент 3 поворачивается на следующий шаг, а исполнительный механизм 2 принимает следующее положение. Удлинения 12 позволяют более точно фиксировать приводной элемент 3 в крайних положениях. А расширения в местах удлинений позволяют направляющим элементам 10 защелкиваться, несмотря на возможный значительный крутящий момент, и соответственно большое трение на боковых стенках, которое могло бы препятствовать защелкиванию при одинаковой ширине всех продольных участков.
, где n - число пар участков. Одновременно направляющие элементы 10 скользят по наклонному дну паза 7, преодолевая сопротивление взаимодействующей с ними пружины до ступеньки 9. После прохождения ступеньки 9 направляющие элементы 10 под действием пружины защелкиваются в глубокой начальной части прямого участка 6, фиксируя приводной элемент 3 и соответственно исполнительный механизм 2 от поворота. После снятия воздействия приводной элемент 3 под действием возвратной пружины 4 возвращается в исходное положение. При этом направляющие элементы 10, взаимодействуя с боковыми поверхностями прямых продольных участков 6, препятствуют вращению приводного элемента 3 и соответственно исполнительного механизма, а взаимодействуя с наклонным дном участка 6, они скользят до ступеньки 8, после чего защелкиваются в начале следующего винтового наклонного участка 7. Повторному попаданию направляющих элементов 10 в один и тот же участок канавки препятствуют ступеньки 8 и 9, а перескакивание через один - боковые стенки, форма и взаиморасположение участков 6 и 7. При повторном воздействии на узел 19 привода и связанный с ним приводной элемент 3 цикл повторяется, элементы механизма взаимодействуют аналогичным образом, приводной элемент 3 поворачивается на следующий шаг, а исполнительный механизм 2 принимает следующее положение. Удлинения 12 позволяют более точно фиксировать приводной элемент 3 в крайних положениях. А расширения в местах удлинений позволяют направляющим элементам 10 защелкиваться, несмотря на возможный значительный крутящий момент, и соответственно большое трение на боковых стенках, которое могло бы препятствовать защелкиванию при одинаковой ширине всех продольных участков.
Во втором варианте механизма взаимодействие элементов происходит, как описано выше. Но в силу того, что контактные поверхности 17 и 18 имеют большую площадь и боковое усилие с рычагов не передается на оси 16, а воспринимается прорезями силовой втулки 14 и передается на корпус 1, он способен передавать больший крутящий момент. Жесткая нажимная втулка 15 в совокупности с мощной возвратной пружиной 4 позволяет рычагам поворачиваться, защелкиваясь на ступеньках в условиях большего трения. При запаздывании одного из рычагов нажимная втулка 15 перераспределяет на него большую часть усилия возвратной пружины 4.
Наличие замкнутой зигзагообразной канавки, имеющей переменную глубину и ступеньки, описанной формы и расположения относительно действия усилия возвратного элемента в совокупности с подпружиненными направляющими элементами (два варианта) позволяет обеспечивать надежное переключение точно на один шаг в условиях вибраций и крутильных колебаний.
Направляющие элементы -образной формы с силовой втулкой, взаимодействующие с нажимной втулкой, позволяют передавать значительные крутящие моменты за счет расположения относительно втулок и канавок, большой площади контакта, а при запаздывании одного из рычагов из-за трения, засорения или износа перераспределять на него большую часть прижимающего усилия, что ведет к повышению надежности срабатывания.
Предлагаемый механизм надежен, прочен, компактен, долговечен и является достаточно универсальным приводным модулем для применения в управляемых скважинных устройствах различного назначения с различными методами дистанционного управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОТКЛОНЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ, УПРАВЛЯЕМОЕ ГИДРОИМПУЛЬСАМИ | 1990 |
|
RU2015287C1 |
| ПЕРЕКЛЮЧАТЕЛЬ ПОТОКА ЖИДКОСТИ | 1991 |
|
RU2015306C1 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИН | 1990 |
|
RU2015286C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ НАКОПЛЕНИЯ ШЛАМА В ОТВЕТВЛЕНИЯХ СКВАЖИНЫ | 2004 |
|
RU2313654C2 |
| Устройство для автоматической сборки составных частей химических источников тока | 1991 |
|
SU1790016A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ГИБКОЙ ТРУБЫ В БОКОВОЙ СТВОЛ СКВАЖИНЫ | 2010 |
|
RU2444603C2 |
| КОНТАКТНЫЙ МЕХАНИЗМ И ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ, СОДЕРЖАЩЕЕ ТАКОЙ МЕХАНИЗМ | 2014 |
|
RU2615981C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| ПРЕВЕНТОР УНИВЕРСАЛЬНЫЙ СФЕРИЧЕСКИЙ | 2003 |
|
RU2324806C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ С КАЧАЮЩИМСЯ РЫЧАГОМ ДЛЯ ПРЕРЫВАТЕЛЯ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ С ФАЗНЫМ И НУЛЕВЫМ КОНТАКТАМИ | 1993 |
|
RU2096853C1 |
Использование: в качестве приводного модуля в конструкциях скважинных устройств, управляемых дистанционно с поверхности. Сущность изобретения: механизм содержит корпус 1, исполнительный механизм 2, например золотниковый клапан, подвижный возвратный элемент 3, возвратную пружину 4, втулку 5 с прямыми пазами 6 и наклонными пазами 7. Направляющие элементы 10 постоянно расположены в пазах 6 и 7. Возвратный элемент подвижным соединением 11 связан с исполнительным механизмом. При необходимости изменить режим работы исполнительного механизма 2, например переключить золотниковый клапан на боковую промывку, производят воздействие на возвратный элемент, сжимая возвратную пружину 4. При движении возвратного элемента, находящиеся в наклонных пазах 7 направляющие элементы поворачивают возвратный элемент и через подвижное соединение исполнительный механизм 2. При снятии воздействия возвратный элемент возвращается в исходное положение, направляющие элементы скользят в прямых пазах 6, фиксируя его от поворота и через подвижное соединение исполнительный механизм от самопроизвольного изменения режима. При следующем воздействии на возвратный элемент он, опускаясь, поворачивается на следующий шаг и фиксируется. 4 з.п. ф-лы, 7 ил.