Изобретение относится к горному делу и может быть использовано для разведки и разработки месторождений железо-марганцевых конкреций.
Известно устройство для подводной добычи строительных материалов, включающее заключенные в корпус исполнительный орган и механизм приведения его в рабочее состояние, соединенный с канатом [1].
Недостатком устройства является низкая эффективность эксплуатации из-за значительных потерь полезного ископаемого и незначительной производительности.
Наиболее близким по технической сущности и достигаемому результату является устройство для подводной добычи полезных ископаемых [2], включающее гибкую подвеску для связи с грузоподъемным механизмом судна, раму, грузоприемные камеры, грузозахватные органы которых выполнены в виде двуплечих рычагов, установленных с возможностью поворота на осях и взаимодействия верхними плечами с гидроцилиндром, а нижними плечами - с захватываемым грузом.
Недостатком этого устройства является низкая эффективность эксплуатации.
Предложенное устройство отличается от прототипа простотой конструкции, т. к. не требует подвода энергии к исполнительному органу для привода гидроцилиндра.
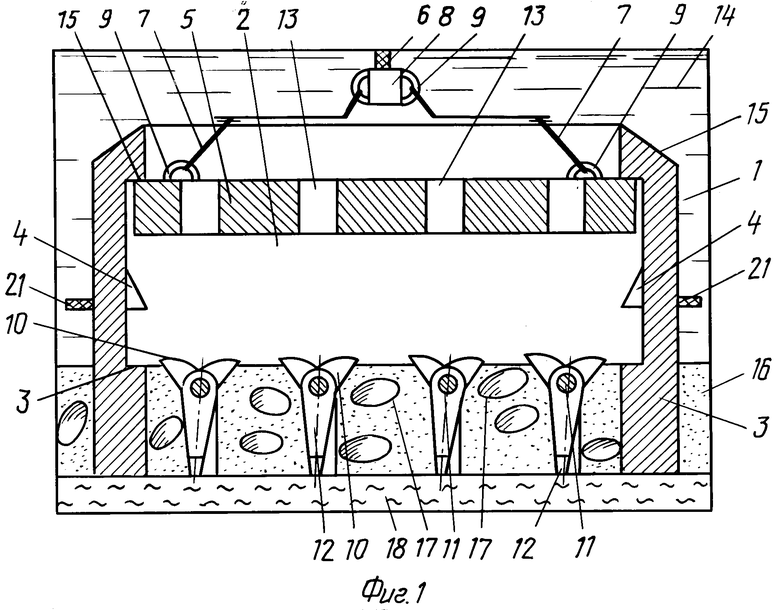
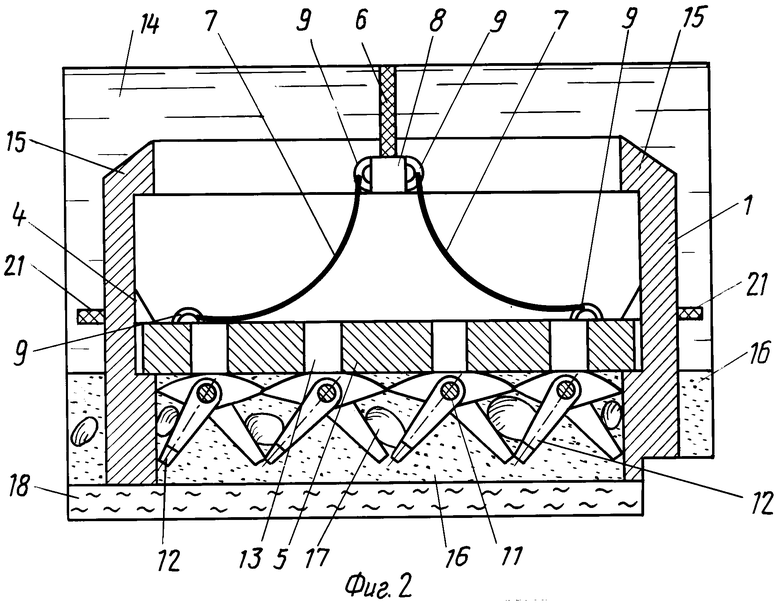
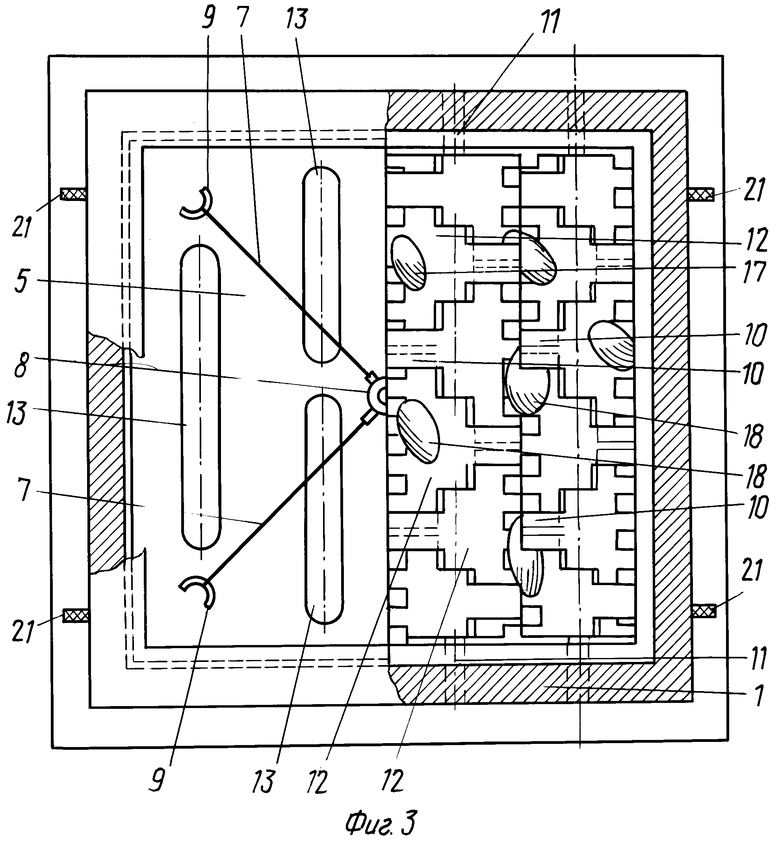
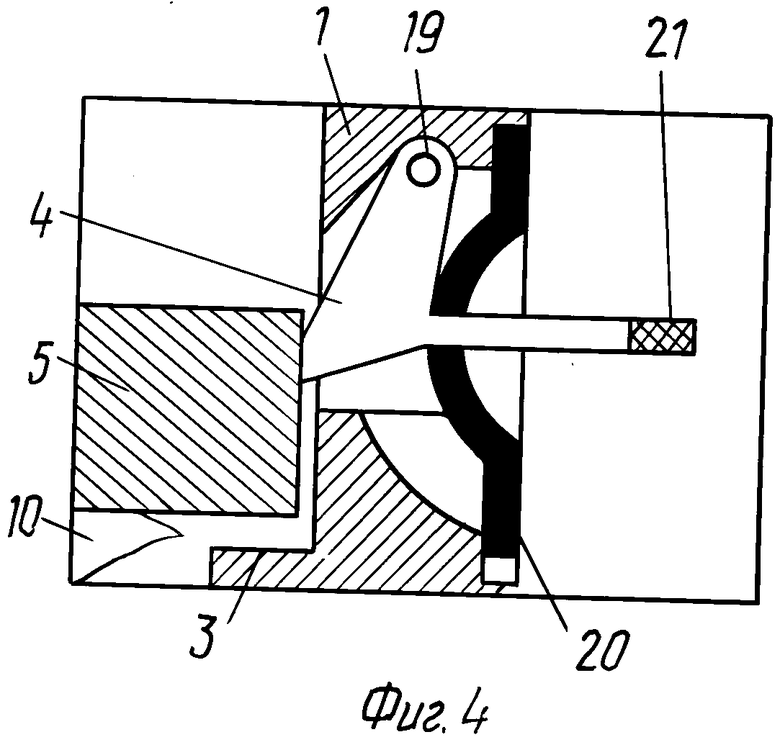
На фиг.1 показан агрегат, в разрезе; на фиг.2 - агрегат в процессе захвата ЖМК; на фиг. 3 - агрегат в плане в процессе захвата ЖМК; на фиг.4 - изображена защелка.
Агрегат для добычи железо-марганцевых конкреций включает корпус, гибкую подвеску, привод, грузоприемные камеры с захватными органами в виде двуплечих рычагов.
Корпус 1 выполнен с проемом 2, снабжен упорами 3 и подпружиненными защелками 4.
В проеме 2 корпуса 1 с возможностью перемещения установлен между упорами 3 привод в виде перфорированной плиты 5. Привод связан с гибкой подвеской, состоящей из каната 6, тяг 7, коуша 8, серьг 9.
Нижняя плоскость плиты 5 взаимодействует с верхними плечами рычагов 10, а кромки ее - с подпружиненными защелками 4.
Захватные органы в виде двуплечих рычагов размещены в корпусе 1 на осях 11 с возможностью поворота. Оси 11 неподвижно закреплены в стенках корпуса 1. Нижнее плечо 12 с перфорацией выполнено в виде прямоугольника, а верхнее плечо 10 - в виде сферического упора. Плечи выполнены упругими, из пружинной стали или пенополиуретанов.
Оси 11 рычагов установлены в корпусе 1 в одной плоскости параллельно друг другу.
Отверстия 13 перфорации плиты 5 расположены в одной вертикальной плоскости с осями 11. Поперечный размер перфорации выполнен из условия возможности вхождения в отверстия верхних плеч рычагов 10.
Плита 5 снабжена четырьмя серьгами 9, в которых закреплены тяги 7. На коуше 8 закреплен канат 6.
Агрегат работает следующим образом.
На плавсредстве (не показано) тяговой лебедкой агрегат поднимают над поверхностью акватории 14, при этом корпус 1 агрегата ложится верхним упором 15 на верхнюю плоскость плиты 5 по ее периметру. Затем агрегат опускают на морское дно. Корпус агрегата, пройдя слой илов 16 с железо-марганцевыми конкрециями (ЖМК) 17, ложится на подстилающие породы 18. При этом канат 6 и тяги 7 ослабляются и плита 5 движется вниз, воздействуя на верхние плечи рычагов 10, которые поворачиваются в противоположные стороны, захватывая при этом ЖМК 17. При положении плиты 5 на нижнем упоре 3 корпуса 1, торцы нижних плеч 12, размещенные на смежных осях 11, смыкаются. Конкреции 17 при этом остаются заключенными во внутреннюю полость, образованную нижней плоскостью плиты 5 и боковыми поверхностями плеч 12, а также внутренней поверхностью корпуса 1.
При движении плиты 5 вниз, она отжимает защелку 4, которая поворачивается на оси 19 (см. фиг.4), сжимая при этом пластинчатую пружину 20. При посадке плиты 5 на нижний упор 3, защелка 4 за счет упругих свойств пружины 20 перемещается по верхней плоскости плиты 5, фиксируя ее в крайнем нижнем положении.
Затем производят подъем агрегата, при этом масса корпуса 1 воспринимается плитой 5 через защелки 4. Илы 16 вымываются через окна 13 и изливаются при этом в акваторию 14.
На плавсредство защелки 4 с помощью рукояток 21 выводят из зацепления с плитой 5, после чего плиту поднимают до ее контакта с верхним упором 15. Рычаги возвращаются в исходное положение за счет крутящего момента, вызванного массой нижних плеч 12 и массой ЖМК 17, тем самым высвобождая конкреции. Затем производят повторное использование агрегата.
Применение агрегата позволит производить разведку, пробную эксплуатацию и разработку месторождений ЖМК с высокой эффективностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| АГРЕГАТ ДЛЯ ДОБЫЧИ КОНКРЕЦИЙ | 1991 |
|
RU2014459C1 |
| АГРЕГАТ ДЛЯ ПОДВОДНОЙ ДОБЫЧИ МИНЕРАЛЬНОГО СЫРЬЯ | 1991 |
|
RU2014460C1 |
| АГРЕГАТ ДЛЯ РАЗРАБОТКИ КОБАЛЬТОВЫХ КОРОК | 1991 |
|
RU2015334C1 |
| АГРЕГАТ ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ | 1991 |
|
RU2014461C1 |
| АГРЕГАТ ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ СО ДНА ОКЕАНА | 1990 |
|
RU2068917C1 |
| АГРЕГАТ ДЛЯ РАЗВЕДКИ И РАЗРАБОТКИ ПОДВОДНЫХ ФОРМАЦИЙ | 1991 |
|
RU2014462C1 |
| УСТРОЙСТВО ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ | 2000 |
|
RU2182231C2 |
| АГРЕГАТ ДЛЯ ГЛУБОКОВОДНОЙ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2000 |
|
RU2181835C2 |
| АГРЕГАТ ДЛЯ ПОДВОДНОЙ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2000 |
|
RU2181838C2 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ РАССРЕДОТОЧЕННЫХ ПО МОРСКОМУ ДНУ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2022 |
|
RU2788227C1 |
Использование: в морском горном промысле для добычи полезных ископаемых. Сущность изобретения: агрегат включает связанный гибкой подвеской с грузоподъемным механизмом судна обслуживания корпус и установленные в корпусе грунтоприемные камеры, захватные органы которых выполнены в виде двуплечих рячагов, размещенных с возможностью поворота на осях и взаимодействия верхними плечами с приводом, а нижними - с захватываемым грузом. Оси рычагов установлены в одной плоскости параллельно друг другу и на каждой из осей установлен ряд рычагов, нижние плечи которых выполнены в виде перфорированных пластин, а верхние плечи - со сферической поверхностью и установлены на рядом расположенных рычагах смежных осей в противоположном направлении. Корпус выполнен с проемом и снабжен упорами и подпружиненными защелками. Привод выполнен в виде перфорированной плиты, связанной с гибкой подвеской и установленной с возможностью перемещения в проеме корпуса между его упорами. Нижней плоскостью плита взаимодействует с верхними плечами рычагов, а кромками - с подпружиненными защелками в своем нижнем положении относительно корпуса. 4 ил.
АГРЕГАТ ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ, включающий связанный гибкой подвеской с грузоподъемным механизмом судна обслуживания корпус, установленные в корпусе грунтоприемные камеры, захватные органы которых выполнены в виде двуплечих рычагов, размещенных с возможностью поворота на осях и взаимодействия верхними плечами с приводом, а нижними - с захватываемым грузом, отличающийся тем, что оси рычагов установлены в корпусе в одной плоскости параллельно и на каждой оси установлен ряд рычагов, нижние плечи которых выполнены в виде перфорированных пластин, а верхние - со сферической поверхностью и установлены на рядом расположенных рычагах смежных осей в противоположном направлении, причем корпус выполнен с проемом и снабжен упорами и подпружиненными защелками, а привод - в виде перфорированной плиты, связанной с гибкой подвеской и установленной с возможностью перемещения в проеме корпуса между его упорами и взаимодействия своей нижней плоскостью с верхними плечами рычагов, а кромками - с подпружиненными защелками при нижнем положении плиты относительно корпуса.
