Изобретение относится к области морского горного дела, в частности к устройствам для подводной добычи рассредоточенных по морскому дну полезных ископаемых, включающих как кобальтомарганцевые корки (КМК), так и железомарганцевые конкреции (ЖМК).
Устройство может быть использовано также для исследования донной поверхности с одновременным взятием проб донных отложений при освоении ресурсов Мирового океана.
Отличительной особенностью рассредоточенных по морскому дну полезных ископаемых является значительная глубина их залегания, порядка 5000 м, на поверхности со сложным рельефом, представляющим сочетание равнинных участков со склонами подводных гор (гайотов) с уступами, ложбинами и т. п. Геологоразведочные исследования показывают, что залежи кобальтомарганцевых корок локализуются на склонах и вершинах подводных возвышенностей (морских гор), хребтов. Корки формируют напластования значительной толщины, причем корки достаточно крепко прикреплены к породе, на которой они залегают, т. е. требуют предварительного разрушения, отбойки.
Известна установка добычи железомарганцевых конкреций (Тимофеев И.П. Шагающие машины для освоения ресурсов морского дна. Л.: Изд-во Ленингр. ун-та, 1987., с. 10-11), снабженная надводным плавсредством, транспортирующим органом, придонным добычным устройством сбора с бункером для заполнения ковшей, закрепленных на тяговом канате. Добычное устройство установлено на салазках, оборудовано в передней части ножом-рыхлителем, имеет днище в виде грохотной решетки, перемещается оно с помощью каната.
Недостатками данной установки являются то, что конструкция ножа-рыхлителя обеспечивает рыхление достаточно мягких донных отложений, но не обеспечивает предварительного разрушения крепких кобальтомарганцевых корок, а конструкция придонного добычного устройства - возможности самостоятельного автономного перемещения по сложным поверхностям залегания рассредоточенных полезных ископаемых.
Известно устройство для подъема марганцевых конкреций или подобных образований с морского дна (патент №1602397, опубл. 23.10.1990), включающее раму, с установленным в ней приводным валком, имеющим по своей окружности средства для подъема марганцевых конкреций и охваченный концентричной стержневой решеткой, образующей в месте забора конкреций зубья.
Основной недостаток конструкции заключается в необходимости протягивания устройства над морским дном при помощи кабель-троса, связанного с плавсредством, что исключает возможность его независимого автономного перемещения по пересеченной поверхности залегания рассредоточенных полезных ископаемых, кроме того внутри приводного валка расположены сопла через которые под давлением подается вода на транспортируемые железомарганцевые конкреции для их отмывания, что ведет к загрязнению моря взвешенными частицами осадочного материала.
Известен способ добычи железомарганцевых конкреций со дна океана с глубин до 5 км и более и устройство для его осуществления (патент №2715108, опубл. 25.02.2020), включающее судно-носитель, добывающий агрегат в виде самоходного управляемого шасси со сборником конкреций, снабженным рыхлителем донных отложений, всасывающим насосом, системой навигации и подъемным устройством.
Недостатком этого устройства является конструкция донного агрегата, снабженного рыхлителем шнекового типа, обеспечивающего при добыче железомарганцевых конкреций предварительное рыхление и перемещение слоя донных отложений, что ведет к замутнению и резкому нарушению целостности экосистемы морей, а конструкция самоходного управляемого шасси не позволяет устройству перемещаться по склонам подводных гор (гайотов), на которых и залегают кобальтомарганцевые корки.
Известно устройство для сбора полиметаллических конкреций (патент №2737944, опубл. 07.12.2020), содержащее жестко закрепленные на центральной балке балластный блок, накопительный бункер, блок постоянной плавучести, механизмы перемещения и агрегаты сбора.
Основным недостатком устройства для сбора полиметаллических конкреций является конструкция агрегатов сбора, выполненных в виде шарнирно соединенных с центральной балкой штанг с передвигающимися по ним узлами сбора. Сбор конкреций осуществляется при вращении штанг относительно центральной балки, что резко ограничивает охватываемую длиной штанг площадь сбора полезного ископаемого и таким образом, снижает производительность установки, кроме того при вращении штанг создается взвесь, наносящая вред экологии морского дна.
Известна установка для добычи железомарганцевых конкреций со дна океана (патент № 2289696, опубл. 20.12.2006), содержащая судно-носитель, на котором расположены органы управления установкой, донный агрегат сбора ЖМК, смонтированный на раме, агрегат перекачки пульпы с насосами, устройство для подъема ЖМК на поверхность океана.
Существенным недостатком рассматриваемой установки является конструкция средства перемещения донного агрегата сбора железомарганцевых конкреций, смонтированного на гусеничном шасси, что оказывает при движении агрессивное механическое воздействие на грунт, приводящее к разрушению поверхностного слоя и нарушению целостности экосистемы дна морей и океанов. Кроме того конструкция устройства для подъема ЖМК, выполнена в виде транспортера, снабженного по всей длине поплавками, заполненными бензином, что при возможной утечке также создает дополнительную опасность загрязнения окружающей среды.
Известен комплекс для добычи железомарганцевых конкреций с шельфовой зоны мирового океана (патент №2405110, опубл. 27.11.2010), принятый за прототип, содержащий базовое судно, кинематически связанное с добычным агрегатом, включающим захватное устройство, установленное на лыжах, транспортирующее устройство, связывающее добычной агрегат с базовым судном.
Недостатком указанного комплекса является невозможность автономного, независимого от базового судна, передвижения добычного агрегата, установленного на лыжах, по поверхности морского дна, конструкция которых не обеспечивает проходимость устройства при сложном рельефе дна со значительными уклонами, а конструкция перекатывающегося захватного устройства, снабженного лопастями - возможность отбойки кобальтомарганцевых корок. Кроме того перемещение добычного агрегата, установленного на лыжах оказывает разрушительное действие на структуру поверхностных отложений, оставляя за собой колею, повышенное замутнение воды в зоне добычи, т. е. нарушение экологии морской среды.
Техническим результатом является создание комплекса для промышленной добычи полезных ископаемых рассредоточенных на больших глубинах.
Технический результат достигается тем, что базовое судно оснащено тремя барабанными лебедками, установленными в центре, на носу и корме базового судна, грузонесущие кабель-тросы которых оснащены оптико-волоконными каналами связи, при этом свободный конец кабель-троса барабанной лебедки, установленной в центре базового судна, соединен с захватным устройством, выполненным в виде рамы с установленными на ней двумя винтовыми движителями, с закрепленным внутри рамы ходовым винтом с левой и правой резьбой, снабженный приводом, связанным с двумя рычагами с возможностью возвратно-поступательного движения относительно оси ходового винта, при этом на концах рычагов шарнирно закреплены фиксаторы Г-образной формы с возможностью взаимодействия с транспортирующим устройством в виде грузового бункера - накопителя полезного ископаемого, корпус которого в верхней части снабжен буртиком, размещенным по всему периметру, а в нижней - устройствами горизонтирования, например домкратами, при этом добычной агрегат выполнен в виде шагающих роботов-отбойщиков, снабженных ударником и не менее чем четырьмя лапами, в виде шарнирно-рычажных механизмов с гидроцилиндрами, с шарнирно закрепленными на свободных концах грейферами и автономных роботов-сборщиков, снабженных системой регулирования плавучести, и не менее чем четырьмя водометными движителями, шарнирно установленными в направляющих с возможностью поворота не менее чем на 130 градусов в двух взаимно перпендикулярных плоскостях относительно корпуса автономного робота-сборщика, выполненного с отсеком-коллектором сбора полезного ископаемого с открывающимися крышками, с размещенным в верхней части корпуса аккумуляторной батареей, гидроакустическим приемопередающим устройством, и шарнирно соединенным с передней частью корпуса механическим манипулятором с захватом-схватом на свободном конце, а так же средствами мониторинга, включающими цифровую видео камеру и прожектор, при этом автономные роботы-сборщики телекомуникационно связаны с боксом - ангаром, разделенным на секции-ячейки, снабженным блоком питания с зарядной станцией, гидроакустическим приемопередающим модулем и соединенным кабель-тросом с барабанной лебедкой, установленной на носу базового судна, а шагающие роботы-отбойщики соединены кабелем с распределительным устройством, размещенным на общей платформе, снабженной системой горизонтирования, например, домкратами, включающим индивидуальные катушки и трансформаторные батареи, посредством кабель-троса связанным с барабанной лебедкой, установленной на корме базового судна.
Комплекс для добычи рассредоточенных по морскому дну полезных ископаемых поясняется следующими фигурами:
фиг. 1 - общий вид комплекса;
фиг. 2 - общий вид комплекса, вид сверху;
фиг. 3 - общий вид захватного устройства;
фиг. 4 - общий вид шагающего робота-отбойщика;
фиг. 5 - общий вид автономного робота-сборщика;
фиг. 6 - вид сверху автономного робота-сборщика;
фиг. 7 - вид сбоку автономного робота-сборщика;
фиг. 8 - захватное устройство с грузовым бункером - накопителем, где:
1 - базовое судно;
2 - лебедка;
3 - кабель-трос;
4 - свободный конец;
5 - захватное устройство;
6 - рама;
7 - винтовой движитель;
8 - ходовой винт;
9 - привод;
10 - левая часть;
11 - правая часть;
12 - рычаг;
13 - гайка;
14 - ось;
15 - фиксатор;
16 - транспортирующее устройство;
17 - полезное ископаемое;
18 - грузовой бункер-накопитель;
19 - корпус;
20 - буртик;
21 - морское дно;
22 - домкрат;
23 - шагающий робот-отбойщик;
24 - автономный робот-сборщик;
25 - ударник;
26 - лапа;
27 - шарнирно-рычажный механизм;
28 - гидроцилиндр;
29 - грейфер;
30 - шарнир;
31 - кабель;
32 - распределительное устройство;
33 - катушка;
34 - трансформаторная батарея;
35 - платформа;
36 - отсек-коллектор;
37 - крышка;
38 - водометный движитель;
39 - направляющая;
40 - сферический шарнир;
41 - механический манипулятор;
42 - захват-схват;
43 - цифровая видеокамера;
44 - прожектор;
45 - аккумуляторная батарея;
46 - гидроакустическое приемопередающее устройство;
47 - бокс - ангар;
48 - секция-ячейка;
49 - блок питания;
50 - зарядная станция;
51 - гидроакустический приемопередающий модуль.
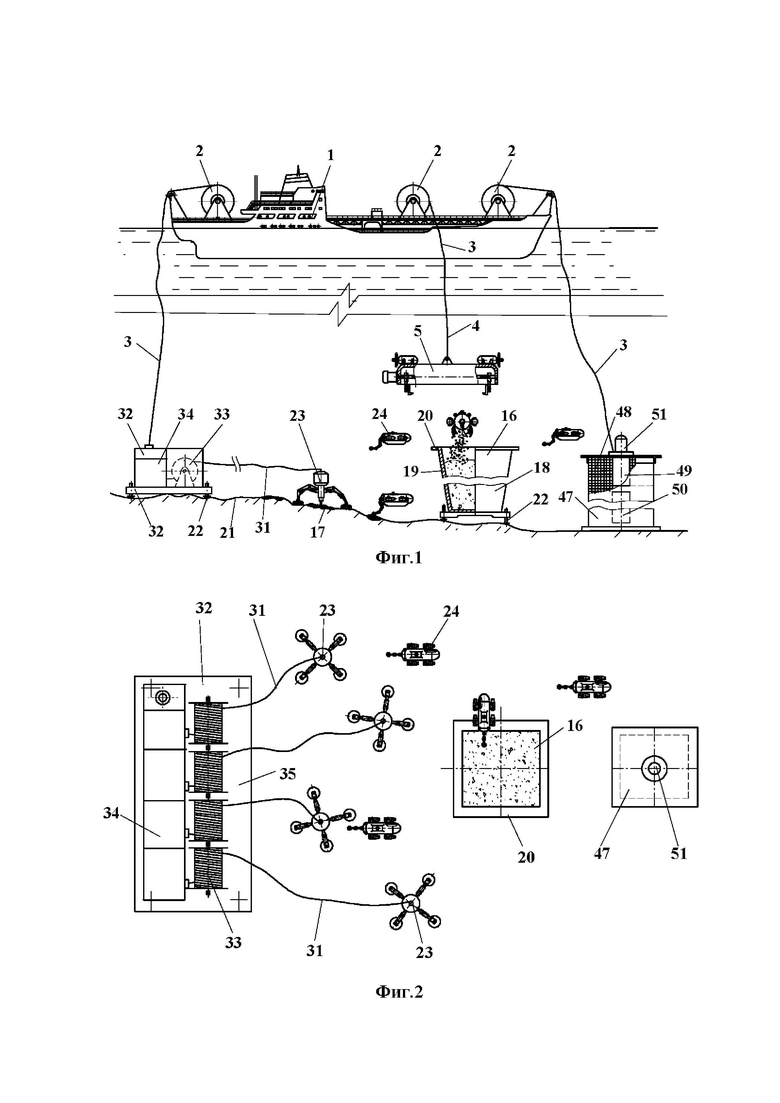
Комплекс для добычи рассредоточенных по морскому дну полезных ископаемых (фиг. 1, 2) включает базовое судно 1, на носу, корме и в центре которого размещены три лебедки 2, грузонесущие кабель-тросы 3 которых оснащены оптико-волоконными каналами связи.
Свободный конец 4 грузонесущего кабель-троса 3 лебедки 2, размещенной в центре базового судна 1 соединен с захватным устройством 5 (фиг. 1, 3), на верхней части рамы 6 которого размещены два винтовых движителя 7 позиционирования положения указанного устройства. Внутри рамы 6 установлен ходовой винт 8 с приводом 9, левая часть 10 которого выполнена с левой резьбой, а правая часть 11 - с правой резьбой. Рычаги 12 в верхней части жестко соединены с гайками 13, с левой и правой резьбой, входящими в зацепление с ходовым винтом 8, с возможностью возвратно-поступательного движения относительно оси 14 ходового винта 8. На свободных концах рычагов 12 шарнирно закреплены фиксаторы 15, имеющие Г- образную форму.
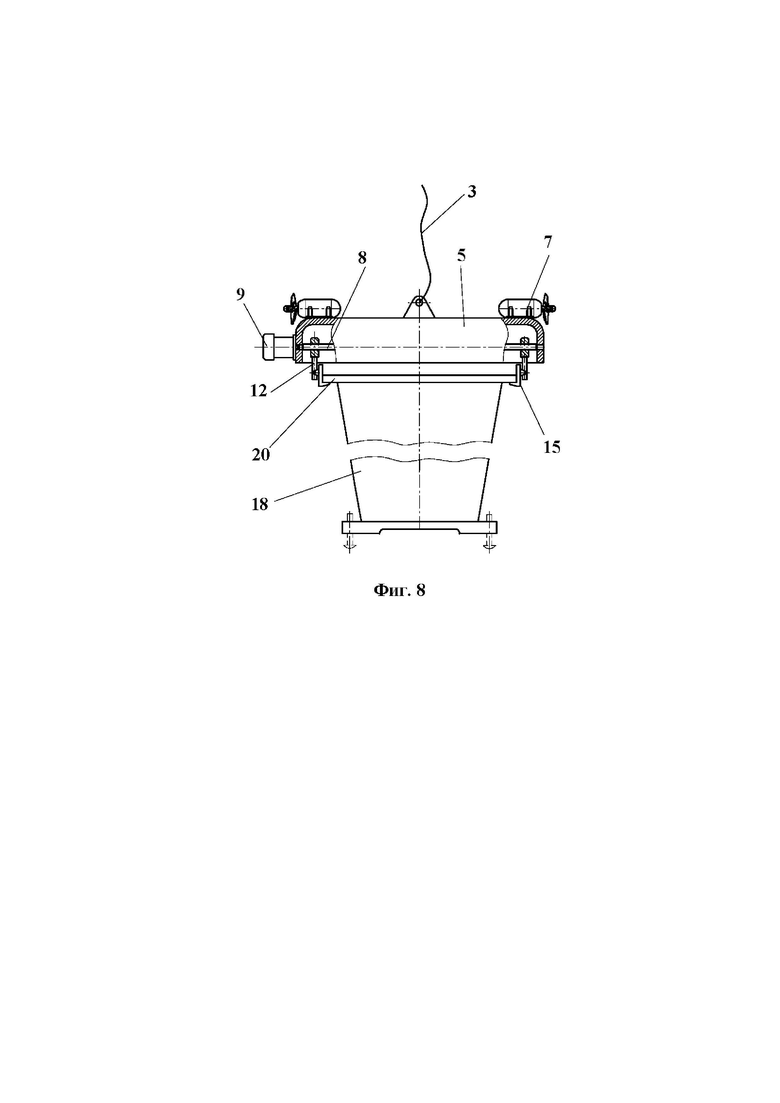
Транспортирующее устройство 16 (фиг. 1, 2) доставки полезного ископаемого 17, железомарганцевых конкреций или кобальтомарганцевых корок, на базовое судно 1 выполнено в виде грузового бункера - накопителя 18, корпус 19 которого по всему периметру в верхней части снабжен буртиком 20, жестко с ним связанным, а в нижней части - устройствами горизонтирования относительно поверхности морского дна 21 (фиг. 1), например, домкратами 22 (фиг. 8)
Добычной агрегат комплекса для добычи рассредоточенных по морскому дну полезных ископаемых выполнен в виде дистанционно управляемых шагающих роботов-отбойщиков 23 (фиг. 1, 4) и автономных роботов-сборщиков 24 (фиг. 1, 5).
Корпус 19 шагающего робота-отбойщика 23 (фиг. 4) оборудован, размещенным в центре корпуса, ударником 25 и шарнирно соединен с не менее чем четырьмя лапами 26, выполненными в виде шарнирно-рычажных механизмов 27 с гидроцилиндрами 28. На свободных концах лап 26 размещены грейферы 29, шарнирами 30 с ними связанные.
Шагающие роботы-отбойщики 23 посредством кабеля 31 (фиг. 1, 2) соединены с распределительным устройством 32, включающим индивидуальные катушки 33 с намотанным кабелем 31, соединенные с трансформаторными батареями 34. Распределительное устройством 32 установлено на общей платформе 35, снабженной системой горизонтирования, например домкратами 22 и посредством кабель-троса 3 соединенное с барабанной лебедкой 2, установленной на корме базового судна 1.
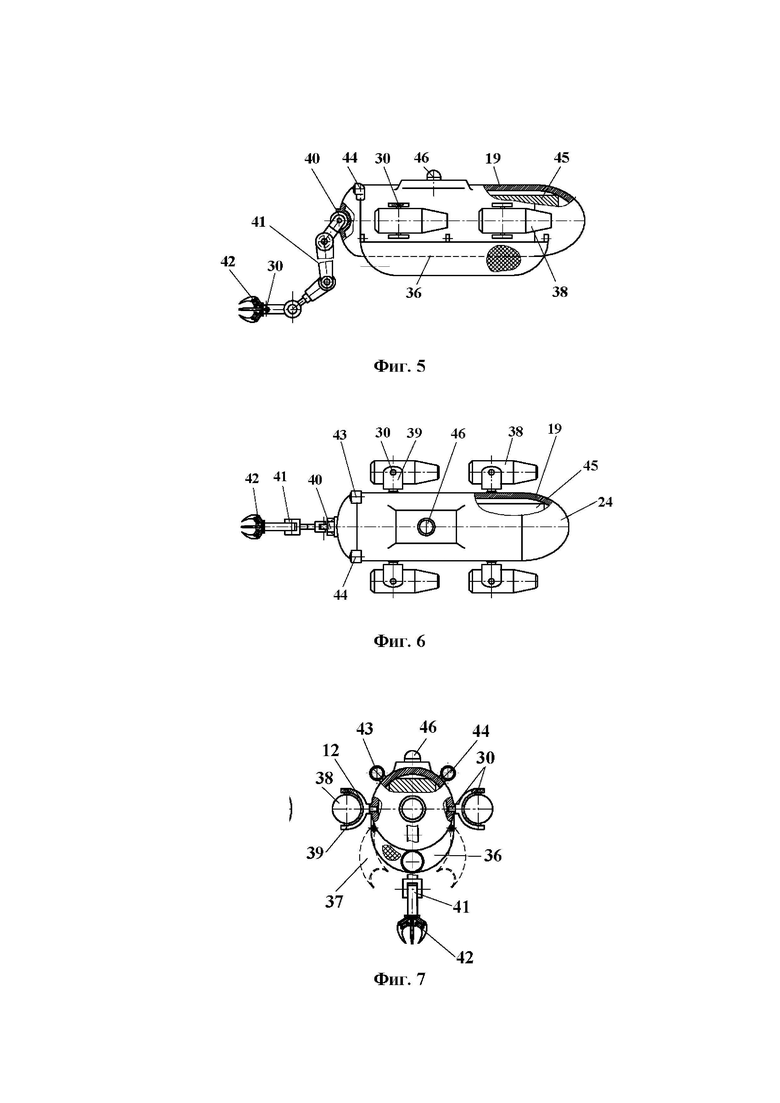
Автономный робот-сборщик 24 (фиг. 1, 5) с системой регулирования плавучести, на чертеже не показана, имеет корпус 19 в нижней части снабженный отсеком-коллектором 36 сбора полезного ископаемого с открывающимися крышками 37. Автономный робот-сборщик 24 снабжен не менее чем четырьмя водометными движителями 38, установленными на боковых сторонах корпуса 19 (фиг. 6, 7) при помощи направляющих 39 шарнирами 30 связанными с корпусом 19 и водометным движителем 38 (фиг. 7) с возможностью поворота последнего не менее чем на 130 градусов в двух взаимно перпендикулярных плоскостях относительно корпуса 19.
В передней части корпуса 19 автономного робота-сборщика 24 при помощи сферического шарнира 40 закреплен механический манипулятор 41 (фиг. 5) свободный конец которого шарниром 30 соединен с захватом-схватом 42, а слева и справа от сферического шарнира 40 - средства мониторинга, включающие цифровую видеокамеру 43 и прожектор 44. В верхней части корпуса 19 установлены аккумуляторная батарея 45 и гидроакустическое приемопередающее устройство 46
Автономные роботы-сборщики 24 дистанционно, средствами телекоммуникации, связаны с боксом - ангаром 47 (фиг. 1), разделенным на секции-ячейки 48 и снабженным блоком питания 49 с зарядной станцией 50 подзарядки автономных роботов-сборщиков 24 и гидроакустическим приемопередающим модулем 51. Бокс-ангар 47 кабелем 3 соединен с барабанной лебедкой 2, установленной на носу базового судна 1 (фиг. 1).
Предлагаемый комплекс для добычи рассредоточенных по морскому дну полезных ископаемых работает следующим образом.
Базовое судно 1, оснащенное с тремя лебедками 2 (фиг. 1), приплывает к предварительно подготовленному участку разработки рассредоточенных полезных ископаемых, например, кобальтомарганцевых корок, размеры и границы которого заранее ограничивают установкой специальных реперов акустических сигналов, на чертеже не показаны.
Первоначально на поверхность морского дна 21 спускают грузовой бункер-накопитель 18. Для этого захватное устройство 5, соединенное со свободным концом 4 грузонесущего кабель-троса 3, проходящего через лебедку 2, размещенную в центре базового судна 1 и портал (на чертеже не показан), приводят в рабочее положение (фиг. 1, 8), а именно включают привод 9 ходового винта 10, установленного в раме 6 захватного устройства 5. Благодаря тому, что левая часть 10 и правая часть 11 ходового винта 8 выполнены соответственно с левой и правой резьбой и взаимодействуют с гайками 13 рычагов 12, начинается поступательное движение рычагов 12 вдоль оси 14 ходового винта 8 в противоположные стороны, что обеспечивает раскрытие захватного устройства 5, сопровождающееся увеличением расстояния между фиксаторами 15 рычагов 12 до расстояния, определяемого размерами перемещаемого в дальнейшем устройства.
В таком положении захватное устройство 5 опускают на поверхность грузового бункера-накопителя 18 (фиг. 8), выполняющего функцию транспортирующего устройства 16 доставки полезного ископаемого 17, например, кобальтомарганцевых корок, на базовое судно 1. При этом фиксаторы 15, имеющие Г-образную форму подводят под буртик 20 корпуса 19 грузового бункера-накопителя 18 (фиг. 8), реверсируют привод 9 ходового винта 8 и, таким образом, надежно зажимают грузовой бункер-накопитель 18 в захватном устройстве 5.
При помощи лебедки 2, установленной в центре базового судна 1 начинают спуск грузового бункера-накопителя 18 на морское дно 21. В процессе спуска включают винтовые движители 7 захватного устройства 5, осуществляющие «правильное» позиционирование грузового бункера-накопителя 18 при опускании или подъеме.
В процессе установки грузового бункера-накопителя 18 (фиг. 1), при необходимости домкратами 22 горизонтируют его положение относительно поверхности морского дна 21. Далее включают привод 9 ходового винта 8 захватного устройства 5, раздвигают рычаги 12 с фиксаторами 15 и снимают захватное устройство 5 с корпуса 19 грузового бункера-накопителя 18. Все операции по управлению осуществляют дистанционно с базового судна 1.
Далее таким же образом осуществляют последовательный спуск при помощи захватного устройства 5 и лебедки 2, установленной в центре судна обеспечения 1 на поверхность морского дна 21 бокса-ангара 47, с размещенными в его секциях-ячейках 48 автономными роботами-сборщиками 24 и распределительного устройство 32 с размещенными на его платформе 35 трансформаторными батареями 34, катушками 33 и шагающими роботами-отбойщиками 23 (фиг. 1, 2). При этом распределительного устройство 32 с размещенными на его платформе 35 шагающими роботами-отбойщиками 23 размещают на морском дне 21 в зоне локации кобальтомарганцевых корок, что требует горизонтирования устройства домкратами 22.
В процессе спуска перечисленных устройств одновременно происходит разматывание кабелей 3, оснащенных оптико-волоконными каналами связи, лебедок 2, размещенных на носу и корме судна и связывающих указанные устройства с центром группового программного управления базового судна 1 (на чертеже не показана). Управление всеми роботами - шагающими роботами-отбойщиками 23 и автономными роботами-сборщиками 24 осуществляется по заранее составленной управляющей программе.
По кабель-тросам 3, оснащенным оптико-волоконными каналами связи, передается видео, информация телеметрии и сигналы управления всеми системами комплекса - шагающими роботами-отбойщиками 23, автономными роботами-сборщиками 24 и т. п. Система «технического зрения» - цифровая видео камера 43 и прожектор 44 для получения видеоинформации об объектах внешней среды с целью их обнаружения и идентификации размещена непосредственно на корпусе 19 автономных роботов-сборщиков 24.
Далее по кабель-тросам 3 лебедок 2, размещенных на носу и корме базового судна 1 из центра группового программного управления передается сигнал к началу работы автономных роботов-сборщиков 24 и шагающих роботов-отбойщиков 23.
По кабелю 31 от трансформаторных батарей 34 подается питание шагающим роботам-отбойщикам 23 и начинается процесс их шагания (фиг. 1) за счет последовательного перемещения лап 26, с закрепленными на них шарнирами 30 грейферами 29, шарнирно-рычажных механизмов 27 гидроцилиндрами 28. Одновременно с этим происходит разматывание кабелей 31 с катушек 33, обеспечивающее возможность движения шагающих роботов-отбойщиков 23 в разных направлениях на значительные расстояния по склону залегания кобальтомарганцевых корок. В нужном положении, дистанционно определяемом оператором с базового судна 1, фиксируют положение каждого шагающего робота-сборщика 23, создавая достаточные усилия прижатия челюстей грейферов 29, гидроцилиндрами 28 к поверхности залегания полезного ископаемого 17 - кобальтомарганцевых корок (фиг. 1, 4). Далее включается ударник 25 и начинается процесс разрушения крепких кобальтомарганцевых корок и отделение их от скальных твердых пород залегания.
Получив сигнал к началу работы из центра группового программного управления, размещенного на базовом судне 1, включаются водометные движители 38, работающие от аккумуляторных батарей 45, автономных роботов-сборщиков 24 (фиг. 5) и они покидают секции-ячейки 48, «вылетая» из бокса-ангара 47, оставаясь при этом телекомуникационно с ним связанным. Управление движением автономных роботов-сборщиков 24, осуществляется сигналами, посылаемыми гидроакустическим приемопередающим модулем 51 бокса-ангара 47, снабженного собственным блоком питания 49 и принимаемые гидроакустическими приемопередающими устройствами 46, размещенными в корпусе 19 автономных роботов-сборщиков 24.
Контроль положения, скорость движения, точное позиционирование автономных роботов-сборщиков 24, «зависание» в горизонтальном положении, благодаря наличию системы регулирования плавучести (на чертеже не показана), на определенной глубине осуществляется изменением угла наклона водометных движителей 38, установленных в направляющих 39 (фиг. 6, 7), с возможностью поворота последних не менее чем на 130 градусов в двух взаимно перпендикулярных плоскостях относительно корпуса 19.
Автономная навигации автономных роботов - сборщиков 24 осуществляется использованием системы «технического зрения», включающей цифровую видеокамеру 43, транслирующую видео в реальном времени и прожектор 44 (фиг. 5). Оснащённые ею автономные роботы - сборщики 24 самостоятельно осуществляют «визуальный» контроль местности, сравнивая текущую картину с информацией, предварительно загружаемой из онлайн-сервисов.
Таким образом определив объект поиска автономный робот - сборщик 24 захватом-схватом 42, шарнирно закрепленным на механическом манипуляторе 41, захватывает раздробленные ранее шагающими роботами-отбойщиками 23 кобальтомарганцевые корки и поворотом механического манипулятора 41 относительно центра сферического шарнира 40 отправляет удерживаемые куски в отсек-коллектор 36. При полном заполнении отсека-коллектора 36 автономный робот-сборщик движется к грузовому бункеру-накопителю 18, «зависает» над ним, благодаря системе регулирования плавучести, открывает крышки 37, добытое полезное ископаемое высыпается в грузовой бункер-накопитель 18 (фиг. 1, 7), а автономный робот-сборщик 24 возвражается за новой порцией полезного ископаемого.
Когда заряд аккумуляторной батареи 45 автономного робота - сборщика 24 составит примерно 10% от начального, автономный робот-сборщик отправляется в свою секцию-ячейку 48 бокса-ангара 47 для подзарядки от зарядной станции 50. Процесс сбора полезного ископаемого 17 продолжается до полного заполнения грузового бункера-накопителя 18.
После полного заполнения грузового бункера-накопителя 18 при помощи захватного устройства 5 (фиг. 3), кабель-троса 3 и лебедки 2, размещенной в центре базового судна 1 его поднимают на борт, разгружают и складируют в трюме базового судна, а затем переправляют на берег для дальнейшей переработки.
Предлагаемый комплекс для добычи рассредоточенных по морскому дну полезных ископаемых является универсальным и может быть использован при добыче железомарганцевых конкреций. В этом случае используют только грузовой бункер-накопитель 18, бокс-ангар 47 с автономными роботами-сборщиками 24, устанавливаемые на морском дне при помощи захватного устройства 5.
Предлагаемый комплекс позволяет повысить производительность добычи рассредоточенных полезных ископаемых за счет исключения многократных спускоподъемных операций, является экологически безопасным, не нарушающим экологию морской среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ СПУСКА И ПОДЪЕМА ОБОРУДОВАНИЯ ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА МОРЕЙ | 2023 |
|
RU2814109C1 |
| СПОСОБ СЕЛЕКТИВНОГО ОТБОРА И ПРЕДВАРИТЕЛЬНОГО ОБОГАЩЕНИЯ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2375578C1 |
| СПОСОБ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ ИЗ ИЛИСТЫХ ДОННЫХ ОТЛОЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562304C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| Способ добычи железомарганцевых конкреций со дна океана с глубин до 5 км и более и устройство для его осуществления | 2019 |
|
RU2715108C1 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ С ШЕЛЬФОВОЙ ЗОНЫ МИРОВОГО ОКЕАНА | 2009 |
|
RU2405110C1 |
| КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ ШЕЛЬФОВОЙ ЗОНЫ МИРОВОГО ОКЕАНА | 2006 |
|
RU2301338C1 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ШЕЛЬФОВОЙ ЗОНЫ МИРОВОГО ОКЕАНА | 2009 |
|
RU2439325C2 |
| ПРОМЕЖУТОЧНАЯ КАПСУЛА ДЛЯ ПОДЪЕМА ТВЕРДЫХ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА МИРОВОГО ОКЕАНА | 2022 |
|
RU2779867C1 |
| СПОСОБ ПОДВОДНОЙ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 1991 |
|
RU2030583C1 |

Изобретение относится к области морского горного дела, в частности к устройствам для подводной добычи рассредоточенных по морскому дну полезных ископаемых, включающих как кобальтомарганцевые корки (КМК), так и железомарганцевые конкреции (ЖМК). Устройство может быть использовано также для исследования донной поверхности с одновременным взятием проб донных отложений при освоении ресурсов Мирового океана. Комплекс для добычи рассредоточенных по морскому дну полезных ископаемых содержит базовое судно с тремя лебедками с кабель-тросами, снабженными оптико-волоконными каналами связи, связанные с захватным устройством, грузовым бункером-накопителем полезного ископаемого и добычным агрегатом, включающим шагающие роботы-отбойщики и автономные роботы-сборщики с боксом-ангаром, полный цикл работы которых автономно координируется с базового судна. Комплекс обеспечивает повышение производительности добычи за счет исключения многократных спускоподъемных операций. 8 ил.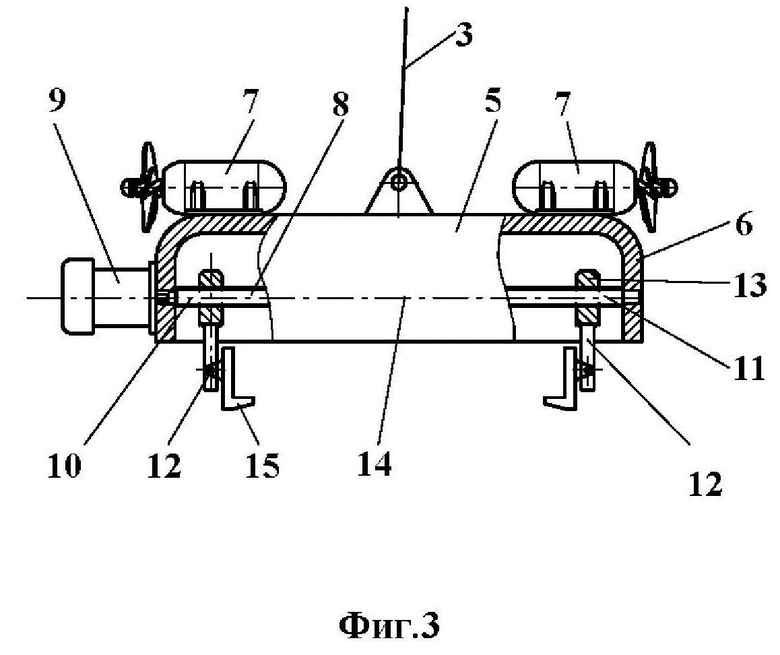
Комплекс для добычи рассредоточенных по морскому дну полезных ископаемых содержащий базовое судно, связанное с добычным агрегатом, захватное устройство, транспортирующее устройство, отличающийся тем, что базовое судно оснащено тремя барабанными лебедками, установленными в центре, на носу и корме базового судна, грузонесущие кабель-тросы которых оснащены оптико-волоконными каналами связи, при этом свободный конец кабель-троса барабанной лебедки, установленной в центре базового судна, соединен с захватным устройством, выполненным в виде рамы с установленными на ней двумя винтовыми движителями, с закрепленным внутри рамы ходовым винтом с левой и правой резьбой, снабженным приводом, связанным с двумя рычагами с возможностью возвратно-поступательного движения относительно оси ходового винта, при этом на концах рычагов шарнирно закреплены фиксаторы Г-образной формы с возможностью взаимодействия с транспортирующим устройством в виде грузового бункера – накопителя полезного ископаемого, корпус которого в верхней части снабжен буртиком, размещенным по всему периметру, а в нижней – устройствами горизонтирования - домкратами, при этом добычной агрегат выполнен в виде шагающих роботов-отбойщиков, каждый из которых снабжен ударником и не менее чем четырьмя лапами, в виде шарнирно-рычажных механизмов с гидроцилиндрами, с шарнирно закрепленными на свободных концах грейферами, и автономных роботов-сборщиков, каждый из которых снабжен системой регулирования плавучести, и не менее чем четырьмя водометными движителями, шарнирно установленными в направляющих с возможностью поворота не менее чем на 130 градусов в двух взаимно перпендикулярных плоскостях относительно корпусов автономных роботов-сборщиков, каждый из которых выполнен с отсеком-коллектором сбора полезного ископаемого с открывающимися крышками, с размещенной в верхней части корпуса аккумуляторной батареей, гидроакустическим приемопередающим устройством, и шарнирно соединенным с передней частью корпуса механическим манипулятором с захватом-схватом на свободном конце, а так же средствами мониторинга, включающими цифровую видео камеру и прожектор, при этом автономные роботы-сборщики телекоммуникационно связаны с боксом – ангаром, разделенным на секции-ячейки, снабженным блоком питания с зарядной станцией, гидроакустическим приемопередающим модулем и соединенным кабель-тросом с барабанной лебедкой, установленной на носу базового судна, а шагающие роботы-отбойщики соединены кабелем с распределительным устройством, размещенным на общей платформе, снабженной системой горизонтирования - домкратами, и включающим индивидуальные катушки и трансформаторные батареи, посредством кабель-троса связанные с барабанной лебедкой, установленной на корме базового судна.
| КОМПЛЕКС ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ С ШЕЛЬФОВОЙ ЗОНЫ МИРОВОГО ОКЕАНА | 2009 |
|
RU2405110C1 |
| СПОСОБ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ СО ДНА ОКЕАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2053366C1 |
| УСТАНОВКА ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ СО ДНА ОКЕАНА | 2005 |
|
RU2289696C1 |
| ПОДВОДНЫЙ ДОБЫВАЮЩИЙ АППАРАТ И СПОСОБ ЕГО РАБОТЫ | 2008 |
|
RU2371580C1 |
| US 3365823 A, 30.01.1968 | |||
| СПОСОБ ПЛАСТИКИ ПРИ ОЛЕОГРАНУЛЕМЕ ПОЛОВОГО ЧЛЕНА | 2008 |
|
RU2376941C1 |

