Изобретение относится к автоматике и вычислительной технике, в частности к индукционному измерению координат элементов трехмерных объемных объектов структурно сложной формы с последующим вводом трехмерной информации в ЭВМ.
Известен способ индукционного измерения координат элементов диэлектрических объектов на плоскости и в пространстве, заключающийся в генерировании импульсных электромагнитных полей в фиксированных точках осей системы координат, формировании сигналов ЭДС в приемных электрических контурах съемника координат, совмещаемого оператором с выбранным элементом объекта, цифровом представлении амплитуд индуцированных сигналов ЭДС и вычислении координат острия съемника функциональной обработкой цифровых эквивалентов амплитуд индуцированных сигналов по заданному алгоритму [1].
Недостатками этого способа являются невысокая точность, обусловленная необходимостью механической дискретизации координатных осей путем механического размещения большого количества излучающих электромагнитное поле координатных катушек, наличием "краевого эффекта" (неоднородности создаваемого координатными катушками магнитного поля вдоль координатных осей), и функциональное ограничение, требующее перед каждым циклом измерений вывода съемника координат в нулевую (базовую) точку отсчета, т.е. измерение перемещений только в относительной системе координат.
Наиболее близким к заявляемому является способ индукционного измерения координат, включающий возбуждение переменных электромагнитных полей в точках координатных осей пространственной системы координат с заданным шагом дискретизации рабочего пространства, формирование с помощью двух магнитометрических датчиков, расположенных в съемнике координат, обобщенного информационного сигнала E Σ = e12 + e22 + e32, где el (l = 1, 2, 3) - амплитуда сигналов, индуцируемых в трех взаимно перпендикулярных катушках индуктивности каждого из магнитометрических датчиков, формировании последовательности цифровых значений выходных сигналов датчиков, определение координат центров датчиков как положений экстремумов последовательностей значений их выходных сигналов по каждой из координатных осей и вычисление координат острия указателя, совмещаемого с выбранным элементом обрабатываемого объекта по формулам вида
U = U2- 
 U1-U
U1-U , где U = {x, y, z,}; a и b - константы съемника координат (а - расстояние от острия до центра первого датчика, b - расстояние между центрами датчиков) [2].
, где U = {x, y, z,}; a и b - константы съемника координат (а - расстояние от острия до центра первого датчика, b - расстояние между центрами датчиков) [2].
Недостатком известного способа является невысокая точность, ограниченная механической (конструкционной) величиной (1-2 мм) шага размещения координатных катушек индуктивности, используемых для возбуждения переменных электромагнитных полей в выбранных точках координатных осей.
Цель изобретения состоит в повышении точности индукционного считывания трехмерных координат за счет минимизации числа возбуждающих электромагнитное поле координатных катушек индуктивности (сведения их числа к трем) и функционального задания токов возбуждения упомянутых катушек индуктивности.
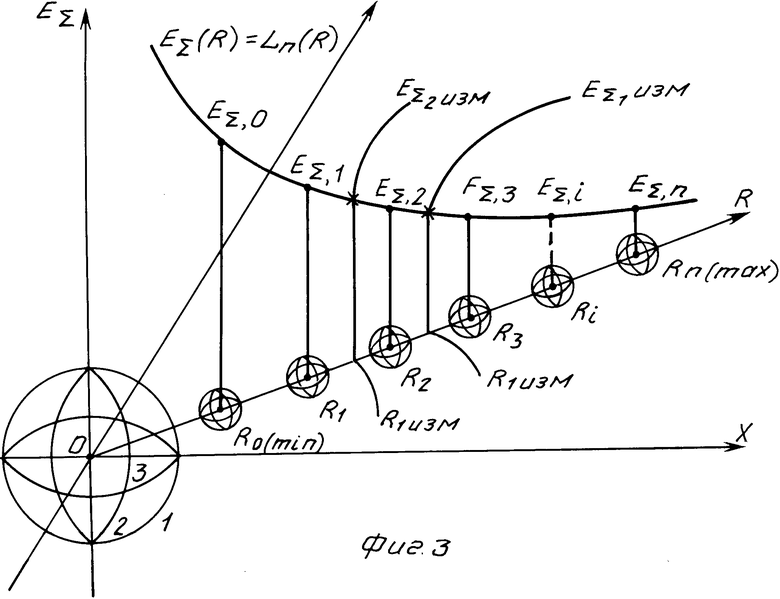
На фиг. 1 показана схема вращения вектора магнитной индукции  ; на фиг. 2 - пример структурной схемы устройства, реализующего способ; на фиг. 3 - график зависимости амплитуды обобщенного информационного сигнала от расстояния.
; на фиг. 2 - пример структурной схемы устройства, реализующего способ; на фиг. 3 - график зависимости амплитуды обобщенного информационного сигнала от расстояния.
Сущность способа заключается в следующем. Если в начало декартовой системы координат (фиг. 1) поместить источник электромагнитного поля так, что его магнитные составляющие по координатным осям изменяются в соответствии с соотношениями =
=  cosα·sinβ;
cosα·sinβ; =
=  sinα·sinβ ; (1)
sinα·sinβ ; (1) =
=  cosβ , где α, β - углы между вектором
cosβ , где α, β - углы между вектором  магнитной индукции поля и положительными направлениями координатных осей OX и OZ соответственно, то при изменении углов в диапазоне 0≅ α ,β≅
магнитной индукции поля и положительными направлениями координатных осей OX и OZ соответственно, то при изменении углов в диапазоне 0≅ α ,β≅  в каждой точке окружающего пространства создается электромагнитное поле, вектор
в каждой точке окружающего пространства создается электромагнитное поле, вектор  которого вращается вокруг начала координат, сохраняя постоянство своего модуля B для равноудаленных от начала координат точек. Действительно, если рассмотреть две произвольные точки М1 и М2, лежащие на поверхности сферы радиуса R, то при выполнении соотношений (1) для модулей векторов
которого вращается вокруг начала координат, сохраняя постоянство своего модуля B для равноудаленных от начала координат точек. Действительно, если рассмотреть две произвольные точки М1 и М2, лежащие на поверхности сферы радиуса R, то при выполнении соотношений (1) для модулей векторов  и
и  имеют однотипные соотношения
имеют однотипные соотношения B
B =
=  =
=  =→
=→
→=  =
=  = B.
= B.
При этом очевидно, что направление векторов  и
и  при выполнении условий (1) совпадают с направлением из точек М1 и М2 на начало координат O.
при выполнении условий (1) совпадают с направлением из точек М1 и М2 на начало координат O.
Если теперь в точках М1 и М2 поместить магнитометрические датчики положения, включающие по три взаимно ортогональные катушки индуктивности одного радиуса r, развернутые вокруг общего центра каждого из датчиков, то амплитуда индуцируемого обобщенного информационного сигнала каждого из датчиков, формируемая как E Σ = e12 + e22 + e32 (el - амплитуда сигнала в каждой из трех приемных катушек), не зависит от пространственной ориентации каждого из датчиков, а является функцией напряженности магнитного поля в центре датчика, т.е., в конечном итоге, функцией расстояния R между центром датчика и источником электромагнитного поля. Действие вектора  магнитной индукции поля (в точке М1 - это вектор
магнитной индукции поля (в точке М1 - это вектор  , в точке М2 - вектор
, в точке М2 - вектор  ) на такой магнитометрический датчик эквивалентно действию на одну приемную катушку индуктивности, плоскость которой все время остается перпендикулярной вектору
) на такой магнитометрический датчик эквивалентно действию на одну приемную катушку индуктивности, плоскость которой все время остается перпендикулярной вектору  магнитной индукции, или, что то же самое, вектор нормали
магнитной индукции, или, что то же самое, вектор нормали  (
( - в точке М1и
- в точке М1и  - в точке М2) совпадает с вектором
- в точке М2) совпадает с вектором  . Для рассматриваемого графического примера такими положениями плоскостей эквивалентных катушек в точках М1 и М2 являются положения S1 и S2.
. Для рассматриваемого графического примера такими положениями плоскостей эквивалентных катушек в точках М1 и М2 являются положения S1 и S2.
Справедливо утверждение, что при вращении вектора магнитной индукции В (при изменении углов α и β от 0 до 90о) амплитуда индуцированного обобщенного информационного сигнала E Σ достигает своего максимального значения E Σмакс при размещении центра магнитометрического датчика в точке, имеющей полярные координаты, соответствующие углам α и β. Действительно, если поместить центр магнитометрического датчика, например, в точку М1, положение которой задается величиной модуля радиуса-вектора R и углами α1 и β1, то суммарный поток Φ вектора магнитной индукции  , модуль которого равен модулю В вектора
, модуль которого равен модулю В вектора  , определяется соотношением
, определяется соотношением
Φ 1 = B˙S1 ˙cos γ , (2) где γ - угол между нормалью  к поверхности S1 и вектором
к поверхности S1 и вектором  . Так как в нашем случае угол γ , как очевидно из фиг. 1, равен нулю (направления
. Так как в нашем случае угол γ , как очевидно из фиг. 1, равен нулю (направления  и
и  совпадают), то для точки М1 имеют
совпадают), то для точки М1 имеют
Φ = B˙ S1.
Если центр магнитометрического датчика помещен в точку М2, удаленную на то же расстояние R от начала координат, то при состоянии магнитного поля, определяемом углами α1 и β1 и соответственно положением S'1 эквивалентной катушки индуктивности, для потока Φ 2 получают величину, меньшую величины потока Φ 1, так как положением S'1 образует с вектором  угол, отличный от 90о. При этом нормаль
угол, отличный от 90о. При этом нормаль  к поверхности S'1 (не показанная на фигурах) не совпадает с вектором
к поверхности S'1 (не показанная на фигурах) не совпадает с вектором  , угол γ > 0 и для потока Φ2 имеют
, угол γ > 0 и для потока Φ2 имеют
Φ2 = B˙S'1 ˙cos γ < B˙S1 = Φ1.
Таким образом, использование вращающегося электромагнитного поля, обеспечивающего равную напряженность Н его магнитной составляющей в равноудаленных от центра вращения точках рабочего пространства, в сочетании с использованием магнитометрических датчиков амплитуда обобщенного информационного сигнала которых инвариантна к их пространственной ориентации, лежит в основе предлагаемого способа считывания трехмерных координат. С этой целью, последовательно задавая фиксированные значения βi от нуля до π/2 с выбранным шагом Δ β, для каждого из βi последовательно изменяют угол α также с выбранным шагом Δ α и определяют последовательность амплитуд E Σi,j (j - индекс угла α) обобщенного информационного сигнала каждого из двух магнитометрических датчиков съемника координат. В процессе вращения электромагнитного поля с шагами Δ β и Δ α последовательным сравнением амплитуд индуцированных обобщенных сигналов для каждого из датчиков максимальное значение амплитуд и фиксируют максимум амплитуд и соответствующие им значения α1, β1 и α2, β2. По значению максимума амплитуды судят о величине радиуса-вектора центра каждого из датчиков, а по значениям α1, β1 и α2, β2 - о положении центров относительно осей OX и OZ декартовой системы координат, начало которой совмещают с центром O вращения.
По известным формулам перехода от полярных координат к декартовым
x = R˙ sin β ˙ cos α;
y = R ˙sin β˙sin α; (3)
z = R ˙cos β находят координаты x1, y1, z1 и x2, y2, x2 центров первого и второго магнитометрических датчиков. Так как датчики в съемнике координат располагаются соосно с острием съемника (фиг. 2), то координаты острия, совмещаемого со считываемой точкой трехмерного объекта, определяются по формулам
x = x2- 
 x1-x
x1-x ;
;
y = y2- 
 y1-y
y1-y ; (4)
; (4)
z = z2- 
 z1-z
z1-z .
.
Последовательность вышеизложенных действий над электромагнитным полем и индуцируемыми им обобщенными информационными сигналами магнитометрических датчиков и составляет содержание предлагаемого способа.
На фиг. 2 представлен пример реализации изложенного способа. Вращающееся электромагнитное поле создается системой взаимно ортогональных идентичных катушек 1, 2, 3 индуктивности, располагаемых по плоскостям XOZ, YOZ и XOY декартовой системы координат. Общий центр катушек 1, 2, 3 совмещен с началом O системы координат. Катушки одновременно возбуждаются импульсами тока, амплитудные значения которых соответственно изменяются по соотношениям
I1 = I˙sin ˙cos α;
I2 = I˙sin ˙sin α;
I3 = I˙cos β .
Устройство содержит блоки 4, 5, 6 генерации импульсов тока I1, I2, I3, три регистра 7, 8, 9 текущих значений sin βi, cos αj sin αj, четыре блока 10-13 памяти на постоянных запоминающих устройствах (ПЗУ), в которых записаны значения функций sin βi , cos αj , sin αj , cos βiс выбранным шагом Δβ и Δα. ПЗУ 11 и 12 подключены к управляющему выходу г, а ПЗУ 10 и 13 - к управляющему выходу д блока 14 управления, который входом а подключен к генератору 15 одиночных импульсов, связанному с кнопкой 16 пуска. В устройство входит съемник 17 координат с двумя магнитометрическими датчиками 18 и 19, включающими по три приемные катушки индуктивности, выходы которых в сочетании по три поданы через усилители-умножители 20-25 с квадратичной характеристикой усиления на аналоговые сумматоры 26 и 27, связанные с аналого-цифровыми преобразователями (АЦП) 28 и 29 соответственно. Выходы каждого из АЦП поразрядно связаны с соответствующими схемами 30, 31 сравнения и вентилями 32, 33 передачи кода. Информационные выходы последних связаны с информационными входами триггерных регистров 34, 35 хранения кода модулей радиусов-векторов R1 и R2 соответственно, а выходы схем 30, 31 сравнения - с управляющими входами вентилей 32, 33 передачи кода. В устройство входят триггерные регистры 36, 37 хранения углов β1, β2, информационными входами связанные через вентили 38, 39 передачи кода, управляющие входы которых подключены к выходам соответствующих схем 30, 31 сравнения, с выходами ПЗУ 10 хранения функции sin β, и триггерные регистры 40, 41 хранения углов α 1, α 2, которые имеют аналогичные связи с вентилями 42, 43 передачи кода, схемами 30, 31 сравнения и ПЗУ 11 хранения функции cos α . Блок 14 управления по выходу е связан с входами начальных установок АЦП 28, 29 и триггерных регистров 34, 35, 36, 40, 41, выходом г через элемент 44 задержки - с управляющими входами генераторов 4, 5, 6 импульсов тока и через второй элемент 45 задержки - с управляющими входами схем 30 и 31 сравнения, Входом б блок 14 управления подключен к выходу завершения цикла ПЗУ 13 хранения значений функций cos β, а входом в - к аналогичному выходу ПЗУ 12 хранения значений функции sin α .
Устройство работает следующим образом.
При установке острия съемника 17 координат в считываемую точку М трехмерного объекта оператор замыкает кнопку 16 пуска, чем запускается генератор 15 одиночных импульсов, выдающий один импульс запуска в блок 14 управления, представляющий собой дискретную переключательную схему. По импульсу запуска блок 14 управления выдает по выходу е сигнал начальной (нулевой) установки триггерных элементов схемы (АЦП 28, 29, регистров 34, 35, 26, 37, 40, 41), после чего сигналом по выходу д заносит на регистр 7 и на блок 6 генерации импульса тока I˙cos β значения функции sin β o и cos β o соответственно. В следующем шаге блок 14 управления выдает серию импульсов по выходу г, которые последовательно передают с ПЗУ 11 и 12 на регистры 8, 9 значения функций cos α j, sin α j соответственно. При этом в блоках 4, 5 происходит формирование произведений соответственно sin βo ˙cosα j и sin βo ˙sin αjи задержанным элементом 44 задержки сигналом с того же выхода г в соответствующие катушки 1, 2, 3 индуктивности с блоков 4, 5, 6 генерации импульсов тока одновременно выдаются сигналы амплитуды I1 = I˙sin β o ˙ cos α j, I2 = I˙sin βo˙ sin αj, I3 = I˙cos βo. При протекании переменных токов в катушках 1, 2, 3 в приемных катушках индуктивности магнитометрических датчиков 18, 19 индуцируются импульсы ЭДС, которые усиливаются (с возведением в квадрат) усилителями-умножителями 20-25, по три суммируются на аналоговых сумматорах 26, 27 и поступают на АЦП 28, 29. К моменту преобразования амплитуд обобщенных информационных сигналов магнитометрических датчиков 18, 19 в код сигнал по выходу г блока 14 управления, пройдя элементы 44, 45 задержки, поступает на опрашивающий управляющий вход схем 30, 31 сравнения, сравнивающих текущий код на выходах АЦП 28, 29 с кодами регистров 34, 35 хранения модуля радиусов-векторов R1 и R2. Если текущий код на выходах АЦП 28, 29 больше соответствующих кодов, хранящихся в регистрах 34, 35 (начальная установка последних равна нулю), то коды с выходов АЦП через соответствующие вентили 32, 33 передачи кода передаются на регистры 34, 35, заменяя на них ранее хранящиеся значения. Одновременно сигналы с выходов схем 30, 31 сравнения через вентили 38, 42 передачи кода (для первого магнитометрического датчика 18) передают коды углов β1 и α 1 из ПЗУ 10 и 11 на регистры 36 и 40 и через вентили 39, 43 передачи кода (для второго магнитометрического датчика 19) - коды углов β2 и α 2 из ПЗУ 10 и 11 на регистры 37, 41.
Таким образом, в процессе развертки (сканирования) рабочего пространства по углу α при фисированном βо на регистрах 34, 36, 40 фиксируются соответственно код максимального значения радиуса-вектора для центра (точки A1) первого магнитометрического датчика 18 и соответствующие максимуму углы β 1, α1. Аналогичные коды зафиксированы на регистрах 35, 37 и 41. Для второго магнитометрического датчика 19.
После завершения полного цикла развертки рабочего пространства по углу α из ПЗУ 12 в блок 14 управления по входу в поступает сигнал, в ответ на который блоком управления по выходу д с ПЗУ 10, 13 на регистр 7 и блок 6 заносят очередные значения функций sin β и cos β и описанные действия повторяются для очередного значения угла β. Этот процесс повторяется до тех пор, пока не будут использованы все значения β i. По завершении цикла по временной с ПЗУ 13 в блок 14 управления по входу б поступает сигнал, прекращающий сканирование рабочего пространства вращающимся электромагнитным полем.
В итоге на регистре 34 зафиксирован код максимального значения радиуса-вектора R1, на регистрах 36 и 40 - углы β1 и α 1 соответственно для первого магнитометрического датчика 18, а на регистрах 35, 37 и 41 - аналогичные величины для вектора датчика 19. По этим данным вычисляются декартовы координаты центров, что представляет рутинную операцию, которая может быть выполнена в ЭВМ. Стоит остановиться на преобразовании условного цифрового кода амплитуды радиусов-векторов центров A1 и A2магнитометрических датчиков в метрическую форму.
На фиг. 3 приведен график функционирования зависимости амплитуды обобщенного информационного сигнала магнитометрического датчика от его расстояния R до начала системы координат. Такую зависимость легко определить экспериментально (получение аналитически - трудно выполнимая задача), снимая показания E Σ ,i магнитометрического датчика в узловых точках Ri при линейном перемещении последнего, как показано на фиг. 3. Направление линейного перемещения с учетом вышеизложенного (пространственной инвариантности как генерирующей электромагнитное поле системы, так и приемной индукционной системы магнитометрического датчика) может быть любым в пределах рабочего пространства, но удобнее это сделать на плоскости. Экспериментально полученные значения E Σ,iхранятся в памяти используемой ЭВМ.
При получении устройством кодов амплитуд E Σ (на регистрах 34, 35) обобщенных информационных сигналов в ЭВМ запускается алгоритм их преобразования в метрическую систему расстояний R1 и R2. Для этого по экспериментально полученным значениям E Σ,i строится полином Ln(R), например, по формуле Ньютона для равных промежутков и интерполирования вперед и путем последовательного сравнения зафиксированных в регистрах 34, 35 значений амплитуд E Σ для каждого из датчиков с последовательно вычисляемыми значениями Ln(Ri) полинома Ln(R) в диапазоне [Rмин, Rмакс] находятся соответствующие им значения радиусов-векторов центров каждого из датчиков.
Таким образом, для получения по формулам (3) декартовых координат центров магнитометрических датчиков известны все величины: R1, α 1, β1и R2, α 2, β2. Координаты острия съемника координат (т.е. координаты элементов трехмерной информации) определяются по формулам (4).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ КООРДИНАТ | 1991 |
|
RU2015565C1 |
| СПОСОБ ЛЕОНОВИЧА СЧИТЫВАНИЯ ТРЕХМЕРНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2074419C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1991 |
|
RU2015566C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНУЮ МАШИНУ (ЭВМ) | 2000 |
|
RU2173882C1 |
| Устройство для считывания графической информации | 1987 |
|
SU1550548A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1993 |
|
RU2069012C1 |
| Устройство для измерения пространственных перемещений | 1986 |
|
SU1379598A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Устройство для считывания графической информации | 1981 |
|
SU983731A1 |
| Устройство для считывания графической информации | 1976 |
|
SU627463A1 |


Изобретение относится к автоматике и вычислительной технике. Его использование в системах измерения координат трехмерных объектов сложной формы позволяет повысить точность считывания. В системе координат рабочего пространства возбуждается переменное электромагнитное поле, напряженность которого индуцируется в выбранной точке с помощью двух магнитометрических датчиков, соосно расположенных в съемнике координат. Благодаря вращению возбуждаемого поля в горизонтальной и вертикальной плоскостях и фиксации углов его поворота, при которых в магнитометрических датчиках наводится сигнал максимальной амплитуды, координаты острия съемника определяются с большей точностью, чем в прототипе. 3 ил.
СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ КООРДИНАТ, включающий в себя возбуждение переменного электромагнитного поля в системе координат рабочего пространства, формирование с помощью расположенных соосно в съемнике координат двух магнитометрических датчиков обобщенного информационного сигнала
EΣ=e12+e22+e32 ,
где el (l = 1, 2, 3) - амплитуды сигналов, индуцированных в трех взаимно перпендикулярных приемных катушках каждого из магнитометрических датчиков,
определение считываемых координат острия съемника координат U = { x, y, z } по формулам вида
U = U2 -  (U1-U2),
(U1-U2),
где U1 = { x1, y1, z1 }, U2 = { x2, y2, z2 } - координаты центров соответственно первого и второго магнитометрических датчиков;
a - расстояние от острия съемника координат до центра первого магнитометрического датчика;
b - расстояние между центрами магнитометрических датчиков,
отличающийся тем, что, с целью повышения точности измерения, вращают вектор магнитной индукции возбуждаемого электромагнитного поля в рабочем пространстве вокруг начала его системы координат в горизонтальной и вертикальной плоскостях, фиксируют максимальные значения амплитуд EΣmax обобщенного информационного сигнала для первого и второго магнитометрических датчиков и соответствующие им углы α1 , β1 и α2 , β2 поворота вектора магнитной индукции поля соответственно в горизонтальной и вертикальной плоскостях, определяют координаты центров каждого из магнитометрических датчиков согласно выражениям
x=R˙cosα˙sinβ ;
y = R˙sinα˙sinβ ;
z=R˙cosβ ,
где R=f(EΣmax) - заранее определенная зависимость,
после чего и определяют искомые координаты.
| Устройство для считывания графической информации | 1987 |
|
SU1550548A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
