Изобретение относится к автоматике и вычислительной технике, а именно к индукционному преобразованию координат элементов трехмерных объектов в электрические сигналы и коды и автоматическому вводу последних в ЭВМ.
Известен способ индукционного измерения координат элементов диэлектрических объектов на плоскости и в пространстве, заключающийся в генерировании импульсных электромагнитных полей в фиксированных точках осей системы координат рабочего пространства, формировании сигналов ЭДС в приемных электрических контурах съемника координат, совмещаемого оператором с выбранным элементом объекта, цифровом представлении амплитуд индуцированных сигналов ЭДС в приемных электрических контурах съемника координат, совмещаемого оператором с выбранным элементом объекта, цифровом представлении амплитуд индуцированных сигналов ЭДС и вычислении координат острия съемника функциональной обработкой цифровых эквивалентов амплитуд индуцированных сигналов по заданному алгоритму [1].
Недостатками известного способа и устройства, его реализующего, являются невысокая точность измерений, обусловленная неоднородностью генерируемого подгруппами координатных катушек и принимаемого магнитометрическими датчиками магнитного поля вдоль координатных осей ("краевой эффект"), и ограничение функциональных возможностей, выражающееся в измерении только относительных перемещений указателя координат без вынесения последнего в процессе работы из заданного объема рабочего пространства.
Наиболее близким к заявляемому является способ индукционного измерения координат, основанный на возбуждении импульсных электромагнитных полей в точках координатных осей пространственной системы координат с заданным шагом дискретизации рабочего пространства, использовании в съемнике координат двух магнитометрических датчиков, выходной информационный сигнал которых формируется как сумма квадратов амплитуд сигналов ЭДС, индуцируемых в трех взаимно ортогональных катушках индуктивности каждого из датчиков, формировании последовательности цифровых значений выходных сигналов датчиков, последовательном взаимном сравнении значений выходных сигналов датчиков, определении координат центров датчиков как положений экстремумов последовательностей значений их выходных сигналов по каждой из координатных осей и вычислений координат острия съемника, совмещаемого с выбранным элементом обрабатываемого объекта, по формулам вида
U = U2- 
 U1-U
U1-U , где U = {x, y, z}; a и b - константы съемника координат (а - расстояние от острия до центра первого датчика, b - расстояние между центрами датчиков) [2].
, где U = {x, y, z}; a и b - константы съемника координат (а - расстояние от острия до центра первого датчика, b - расстояние между центрами датчиков) [2].
Недостатком данного способа является невысокая точность, ограниченная механической (конструкционной) величиной (1-2 мм) шага размещения координатных катушек индуктивности, используемых для возбуждения импульсных электромагнитных полей в фиксированных точках координатных осей.
Цель изобретения состоит в повышении точности индукционного считывания трехмерной информации за счет исключения механической дискретизации рабочего пространства по координатным осям путем создания используемого градиента анализируемого обобщенного информационного сигнала магнитометрических датчиков с помощью вращения электромагнитного поля
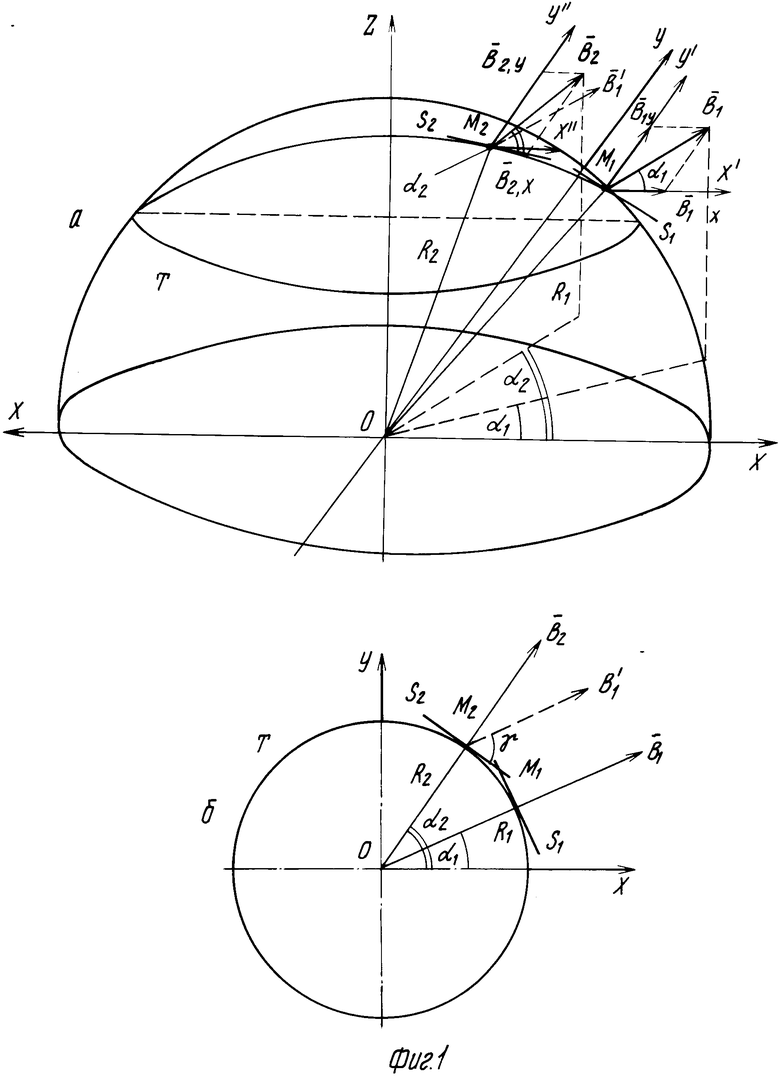
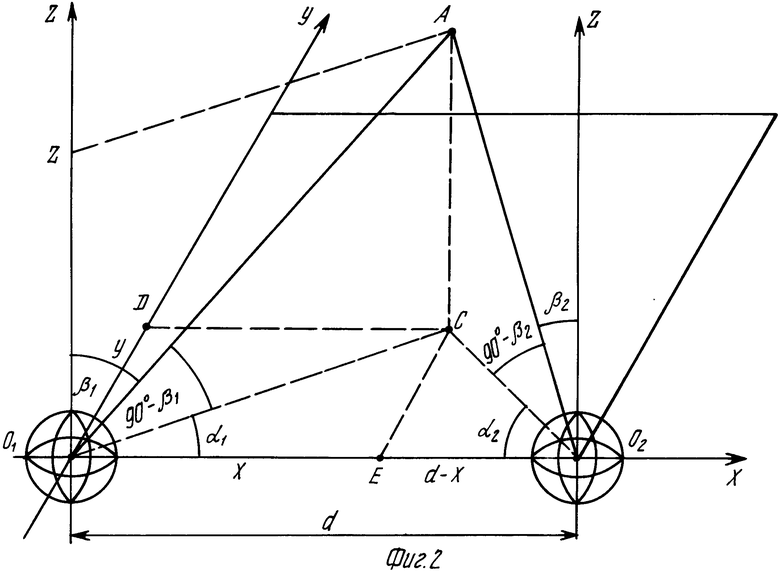
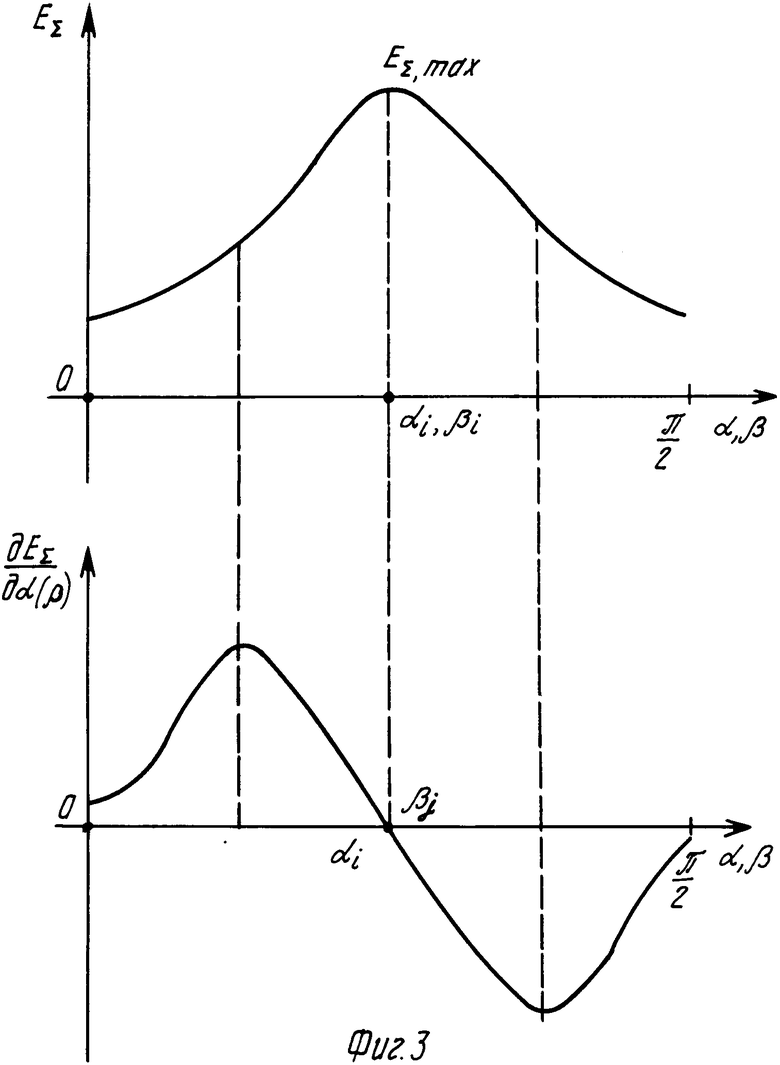
На фиг. 1 представлена схема вращения вектора  магнитной индукции поля в плоскости ХOY; на фиг. 2 показано определение декартовых координат одной из точек приема индуцированного сигнала по фиксированным углам; на фиг. 3 даны графики функций EΣ и
магнитной индукции поля в плоскости ХOY; на фиг. 2 показано определение декартовых координат одной из точек приема индуцированного сигнала по фиксированным углам; на фиг. 3 даны графики функций EΣ и  ; на фиг. 4 изображена структурная схема для реализации способа.
; на фиг. 4 изображена структурная схема для реализации способа.
Сущность способа заключается в следующем. Если в точке, лежащей на оси (например, OХ) декартовой системы координат (фиг. 1), поместить источник электромагнитного поля таким образом, что его магнитные составляющие по координатным осям OХ и OY изменяются в соответствии с соотношениями =
=  cosα; (1)
cosα; (1) =
=  sinα, где α - угол между вектором
sinα, где α - угол между вектором  магнитной индукции поля и координатной осью OХ, то при изменении угла α в диапазоне 0 ≅α≅π /2 в каждой торчке окружающего пространства создается электромагнитное поле, вектор
магнитной индукции поля и координатной осью OХ, то при изменении угла α в диапазоне 0 ≅α≅π /2 в каждой торчке окружающего пространства создается электромагнитное поле, вектор  которого вращается вокруг точки возбуждения поля в плоскости XOY, сохраняя постоянство своего модуля В в равноудаленных от центра вращения точках пространства. Множество таких точек образуют окружность Т, получаемую сечением сферы радиуса R (R - расстояние выбранной точки пространства до центра вращения) плоскостями, параллельными плоскости XOY. Действительно, если рассмотреть две такие произвольные точки М1 или М2, то при выполнении соотношений (1) для модулей векторов
которого вращается вокруг точки возбуждения поля в плоскости XOY, сохраняя постоянство своего модуля В в равноудаленных от центра вращения точках пространства. Множество таких точек образуют окружность Т, получаемую сечением сферы радиуса R (R - расстояние выбранной точки пространства до центра вращения) плоскостями, параллельными плоскости XOY. Действительно, если рассмотреть две такие произвольные точки М1 или М2, то при выполнении соотношений (1) для модулей векторов  и
и  имеют однотипные соотношения
имеют однотипные соотношения B
B =
=  =
=  = B.
= B.
При этом очевидно, что направления векторов  и
и  при выполнении условий (1) в плоскости XOY совпадают с направлением из точек М1 и М2 на центр вращения поля.
при выполнении условий (1) в плоскости XOY совпадают с направлением из точек М1 и М2 на центр вращения поля.
Если теперь в точках М1 и М2 поместить магнитометрический датчик, включающий три взаимно ортогональные круговые катушки индуктивности одного радиуса r, развернутые вокруг общего центра, то амплитуда индуцированного обобщенного информационного сигнала магнитометрического датчика, формируемая как EΣ = e12 + e22 + +e32 (ei - амплитуда сигнала каждой из трех приемных катушек), не зависит от пространственной ориентации датчика, а является функцией напряженности магнитного поля в центре датчика, т.е. в конечном итоге функцией расстояния R между центром датчика и источником электромагнитного поля. Действие вектора  магнитной индукции поля (в точке М1 - это вектор
магнитной индукции поля (в точке М1 - это вектор  , в точке М2 - вектор
, в точке М2 - вектор  ) на такой магнитометрический датчик эквивалентные действию на одну приемную катушку индуктивности, плоскость S которой все время остается перпендикулярной вектору
) на такой магнитометрический датчик эквивалентные действию на одну приемную катушку индуктивности, плоскость S которой все время остается перпендикулярной вектору  . Для рассматриваемого графического примера такими положениями плоскостей эквивалентных катушек в точках М1и М2 будут, очевидно, положения S1 и S2.
. Для рассматриваемого графического примера такими положениями плоскостей эквивалентных катушек в точках М1и М2 будут, очевидно, положения S1 и S2.
Справедливо утверждение, что при вращении вектора магнитной индукции  (при изменении угла α от 0о до 90о) амплитуда индуцированного обобщенного сигнала EΣ достигает своего максимального значения при размещении центра магнитометрического датчика в точке, имеющей направление на точку вращения поля в плоскости XOY, определяемое углом α . Действительно, как видно из фиг. 1б, только в этом случае вектор
(при изменении угла α от 0о до 90о) амплитуда индуцированного обобщенного сигнала EΣ достигает своего максимального значения при размещении центра магнитометрического датчика в точке, имеющей направление на точку вращения поля в плоскости XOY, определяемое углом α . Действительно, как видно из фиг. 1б, только в этом случае вектор  образует с площадкой S1 в плоскости XOY прямой угол, соответствующий максимуму потока Φ вектора магнитной индукции
образует с площадкой S1 в плоскости XOY прямой угол, соответствующий максимуму потока Φ вектора магнитной индукции  через эту площадку. Как легко убедиться, параллельным переносом вектора
через эту площадку. Как легко убедиться, параллельным переносом вектора  из точки М1 в точку М2, при состоянии магнитного поля, определяемом углом α 1, вектор
из точки М1 в точку М2, при состоянии магнитного поля, определяемом углом α 1, вектор  в точке М2 с плоскостью S2 эквивалентной катушки образует в плоскости XOY угол γ, отличный от 90о, что соответствует меньшему значению потока в точке М2 при угле α 1, а следовательно, и меньшему значению амплитуды EΣ обобщенного информационного сигнала магнитометрического датчика.
в точке М2 с плоскостью S2 эквивалентной катушки образует в плоскости XOY угол γ, отличный от 90о, что соответствует меньшему значению потока в точке М2 при угле α 1, а следовательно, и меньшему значению амплитуды EΣ обобщенного информационного сигнала магнитометрического датчика.
Точно такие же рассуждения справедливы и для вращения электромагнитного поля в плоскости YOZ. При этом фиксируется значение угла β, соответствующее максимуму амплитуды EΣ обобщенного информационного сигнала.
Очевидно, что сделанные заключения справедливы и для второй точки вращения поля на оси OX.
Таким образом, использование вращающегося в выбранных плоскостях XOY и YOZ электромагнитного поля в сочетании с использованием в точках приема индуцированного сигнала магнитометрических датчиков лежит в основе предлагаемого способа считывания трехмерной информации. При этом представляется возможность определения угловых засечек α 1(1), β1(1) и α 2(1), β2(1) центра первого магнитометрического датчика (индекс i) из обеих точек вращения поля и угловых засечек α 1(2), β 1(2) и α 2(2), β 2(2) центра второго датчика из тех же точек вращения. При известном расстоянии d между точками вращения электромагнитного поля этих данных достаточно для определения декартовых координат точек приема индуцированных сигналов (центров двух магнитометрических датчиков).
Действительно из фиг. 2, решая прямоугольные треугольники O1CE и O2CE, для координаты х точки A приема получают
x = d·  .
.
При известной координате х = O1E из треугольника O1CE для координаты y = CE имеют
y = d·  .
.
Из рассмотрения треугольников O1CE и O1AC для координаты z = AC получают
z = d·  .
.
На фиг. 2 рассмотрены геометрические построения для одной точки приема (центра одного магнитометрического датчика). Точно такие же выводы, очевидно, справедливы и для второй точки приема (второго магнитометрического датчика). Так как датчики в съемнике координат располагаются соосно с острием съемника (см. фиг. 3), то координаты острия, совмещаемого со считываемой точкой трехмерного объекта, определяются по формулам
x = x2- 
 x1-x
x1-x ;
;
y = y2- 
 y1-y
y1-y ;
;
z = z2- 
 z1-z
z1-z .
.
Значения углов α и β, при которых непрерывно применяющаяся амплитуда обобщенного информационного сигнала достигает своего максимума при изменении углов, определяются дифференцированием сигнала EΣ по соответствующему углу. Известно, что экстремальному значению функции (в том числе и EΣ (α), EΣ (β )) соответствует равенство нулю ее первой производной (фиг. 3). Сравнивая значения  и
и  с пороговым уровнем Uпор = 0, в момент равенства фиксируют соответствующие углы α и β .
с пороговым уровнем Uпор = 0, в момент равенства фиксируют соответствующие углы α и β .
Последовательность вышеописанных действий над электромагнитным полем и индуцируемыми им обобщенными информационными сигналами в точках приема (в магнитометрических датчика) и составляет содержанием предлагаемого способа.
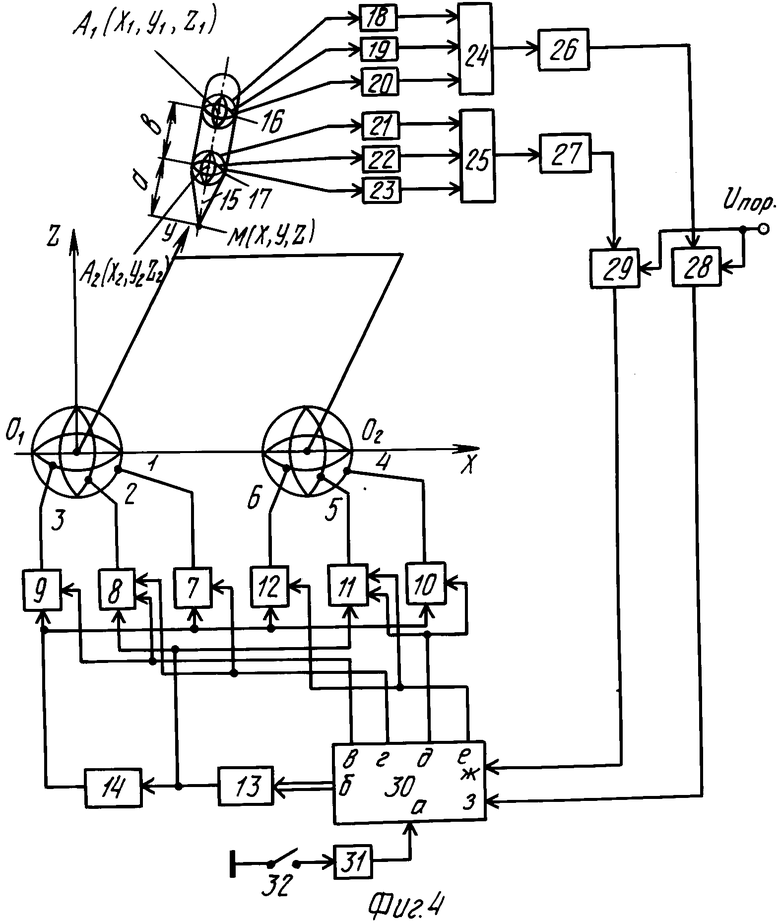
На фиг. 4 представлен пример реализации изложенного способа. Вращающееся электромагнитное поле создается в двух точках O1 и O2, лежащих на известном расстоянии d друг от друга на оси OX, двумя системами из трех взаимно перпендикулярных идентичных катушек индуктивности. Поле поочередно вращается в каждой из точек O1 и O2 и поочередно в каждой из выбранных плоскостей XOY и YOZ. Излучающие электромагнитное поле катушки 1, 2, 3 и 4, 5, 6 соответственно ориентированы по координатным плоскостям XOZ, YOZ и XOY соответственно декартовой системы координат. Входы катушек подключены соответственно к токовым ключам 7, 8, 9 и 10, 11, 12. Токовые входы ключей 8, 11 подключены к генератору 13 синусоидального тока, токовые входы ключей 7, 9 и 10, 12 - к выходу фазовращателя 14, связанного с генератором 13.
Устройство содержит съемник 15 координат с двумя магнитометрическими датчиками 16 и 17, приемные катушки которых подключены соответственно к усилителям-квадраторам 18, 19, 20 и 21, 22, 23. Выходы усилителей каждого датчика связаны соответственно с аналоговыми сумматорами 24 и 25, подключенными выходами к дифференцирующим схемам 26 и 27 соответственно. Выходы дифференцирующих схем связаны с входами соответствующих компараторов 28, 29, на вторые входы которых подан пороговый уровень Uпор = 0.
Устройство включает блок 30 управления, запускающим входом а связанный с генератором 31 одиночных импульсов, подключенным к кнопке 32 пуска. Блок 30 управления представляет собой обычную дискретную переключательную схему, построение которой не представляет принципиальных трудностей. Он должен содержать ПЗУ, в котором записываются значения функции sin αi ( βi) с необходимой дискретностью Δα(Δβ) угла вращения, а также счетчики для формирования углов αi ( βi) = =i˙Δα(Δβ). Выходом б блок 30 управления связан с генератором 13 синусоидального тока, выходом в - с управляющими входами ключей 8, 9, выходом г - с входами ключей 7, 8, выходом д - с входами ключей 10, 11, выходом е - с входами ключей 11, 12, а управляющими входами ж и з - с выходами компараторов 29 и 28 соответственно.
Устройство работает следующим образом.
После установки острия съемника в считываемую точку М с неизвестными координатами x, y, z оператор замыкает кнопку 32 пуска, чем возбуждается генератор 31 одиночных импульсов, запускающий блок 30 управления. Последний по выходу г открывает токовые ключи 7 и 8 и по выходу а выдает в генератор 13 синусоидального тока последовательность цифровых значений функций синуса с шагом Δα по углу. На выходе генератора 13 формируется непрерывный сигнал синусоидальной формы, поступающий на вход фазовращателя 14, преобразующий его в сигнал косинусоидальной формы. Одновременно сигналы с генератора 13 и фазовращателя 14 проходят открытые по выходу г токовые ключи 8 и 7 соответственно и возбуждают катушки 1 и 2 первого вращателя (в точке O1) электромагнитного поля в плоскости XOY. При этом в точках приема индуцированного сигнала A1 и A2, в которых находятся центры соответствующих магнитометрических датчиков 16 и 17, возбуждаются электромагнитные поля, магнитная составляющая которых индуцирует в приемных катушках датчиков сигналы ЭДС, которые усиливаются на усилителях 18, 19, 20 и 21, 22, 23 с квадратичной характеристикой, суммируются в аналоговых сумматорах 24, 25 и дифференцируются по углу в схемах 26, 27 дифференцирования. Дифференцированные сигналы поступают на соответствующие компараторы 28, 29, где сравниваются с пороговым нулевым уровнем. В момент сравнения амплитуды дифференцированного сигнала для каждого из датчиков компараторы 28, 29 выдают управляющие сигналы на входы з и ж соответственно. По этим сигналам в блоке 30 управления для каждого из датчиков фиксируется угол α i = i˙Δα, которому соответствует максимум амплитуды EΣ обобщенного информационного сигнала. В дальнейшем блок 30 управления таким же образом, выдавая управляющие сигналы по выходам в, д и е, а по выходу а значения функции синуса для них, формирует остальные угловые засечки β1(1), β1(2), α2(1), α 2(2), β1(2), β2(2), необходимые для вычисления декартовых координат x1, y1, z1 и x2, y2, z2 точек приема индуцированного сигнала (центров магнитометрических датчиков), по которым определяются текущие координаты x, y, z считываемой точки М трехмерного объекта по формулам вида U = U2- 
 U1-U
U1-U . Все рутинные вычисления целесообразно выполнять в микро- или миниЭВМ.
. Все рутинные вычисления целесообразно выполнять в микро- или миниЭВМ.
Отличительной положительной особенностью предлагаемого способа является отсутствие в составляющих его операциях механической дискретизации рабочего пространства и операции непосредственного преобразования амплитуд индуцируемых сигналов в код. Его потенциальные возможности по точности измерений координат определяются, фактически, только чувствительностью используемых компараторов, разрешающая способность которых несравненно выше возможностей механической дискретизации и разрешающей способности аналого-цифровых преобразователей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕОНОВИЧА СЧИТЫВАНИЯ ТРЕХМЕРНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2074419C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ КООРДИНАТ | 1991 |
|
RU2015564C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1991 |
|
RU2015566C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНУЮ МАШИНУ (ЭВМ) | 2000 |
|
RU2173882C1 |
| Устройство для измерения полярных координат | 1980 |
|
SU883939A1 |
| Устройство для измерения пространственных перемещений | 1986 |
|
SU1379598A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1550548A1 |
| Устройство для считывания графической информации | 1979 |
|
SU862153A1 |
| Устройство для считываниягРАфичЕСКОй иНфОРМАции | 1978 |
|
SU798910A1 |
| Устройство для считывания графической информации | 1973 |
|
SU470827A1 |
Изобретение относится к автоматике и вычислительной технике. Его использование в системах измерения координат трехмерных объектов сложной формы позволяет повысить точность считывания. В двух точках рабочего пространства, лежащих на одной из его координатных осей, возбуждается переменное электромагнитное поле, напряженность которого индицируется в выбранной точке с помощью двух магнитометрических датчиков, соосно расположенных в съемнике координат. Благодаря вращению возбуждаемого поля поочередно в каждой точке во взаимно перпендикулярных плоскостях и фиксации углов вращения, при которых производная сиганала, наводимого в магнитометрических датчиках, равна нулю, координаты острия съемника определяются более точно, чем в прототипе. 4 ил.
СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ КООРДИНАТ, включающий в себя возбуждение переменного электромагнитного поля в двух заданных точках, расположенных на расстоянии d одна от другой на одной из координатных осей в системе координат рабочего пространства, формирование с помощью расположенных соосно в съемнике координат двух магнитометрических датчиков обобщенного информационного сигнала
EΣ=e12+e22+e32 ,
где el (l = 1, 2, 3) - амплитуды сигналов, индуцированных в трех взаимно перпендикулярных приемных катушках каждого из магнитометрических датчиков,
определение считываемых координат острия съемника координат U = { x, y, z } по формулам вида
U = U2- 
 U1-U
U1-U ,
,
где U1 = { x1, y1, z1 }, U2 = { x2, y2, z2 } - координаты центров соответственно первого и второго магнитометрических датчиков;
a - расстояние от острия съемника координат до центра первого магнитометрического датчика;
b - расстояние между центрами магнитометрических датчиков,
отличающийся тем, что, с целью повышения точности измерения, вращают вектор магнитной индукции возбуждаемого электромагнитного поля поочередно в первой и второй заданных точках в координатной плоскости, проходящей через координатную ось с заданными точками, и во второй заданной точке в плоскости, перпендикулярной этой координатной оси, определяют скорость изменения обобщенного информационного сигнала первого и второго магнитометрических датчиков при вращении вектора магнитной индукции возбуждаемого электромагнитного поля в обеих выбранных плоскостях, фиксируют углы αji , βji (i= 1,2 - номер магнитометрического датчика, j = 1, 2 - номер заданной точки) соответственно, между координатной осью, проходящей через две заданные точки, и проекциями направлений на центры магнитометрических датчиков в первой выбранной плоскости и между координатной осью, перпендикулярной первой выбранной плоскости, и направлениями на центры магнитометрических датчиков при равенстве нулю скорости изменения амплитуды обобщенных информационных сигналов, определяют координаты центров каждого из магнитометрических датчиков согласно выражениям
xi= d  ;
;
yi= d  ;
;
zi= d·  ,
,
после чего определяют искомые координаты.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1550548A1 |
