Изобретение относится к автоматике и вычислительной технике, а именно к устройствам автоматизированного кодирования и ввода в ЭВМ метрической информации (координат) структурно сложных изображений. Оно может быть использовано в системах автоматизированного проектирования, автоматизированной обработки графических данных научного и технического эксперимента и в других областях науки и техники, где исходные данные и промежуточные результаты представляются в графической форме.
Недостатками аналогичных устройств являются невысокая точность, обусловленная включением в состав устройства ортогональной матрицы координатных шин, механическое позиционирование которых в плоскости планшета приводит к неизбежным погрешностям, большой объем коммутационного оборудования (коммутаторы, токовые ключи), вызываемый большим числом координатных шин и неудобство в работе, обусловленное необходимостью специального планшета.
Целью изобретения является повышение точности считывания и удобства пользования за счет использования одного составного датчика импульсов переменного электромагнитного поля и за счет полиномиальной аппроксимации зависимости амплитуды индуцированного сигнала, сообщенного по величинам сигналов от двух приемных катушек съемника координат.
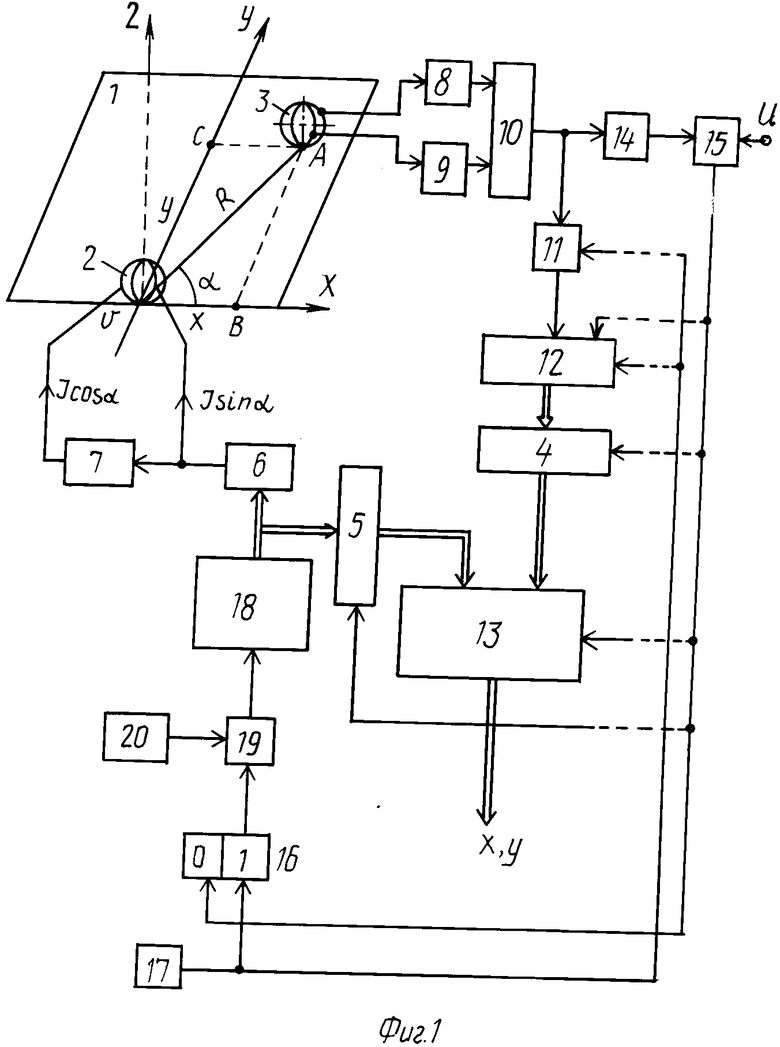
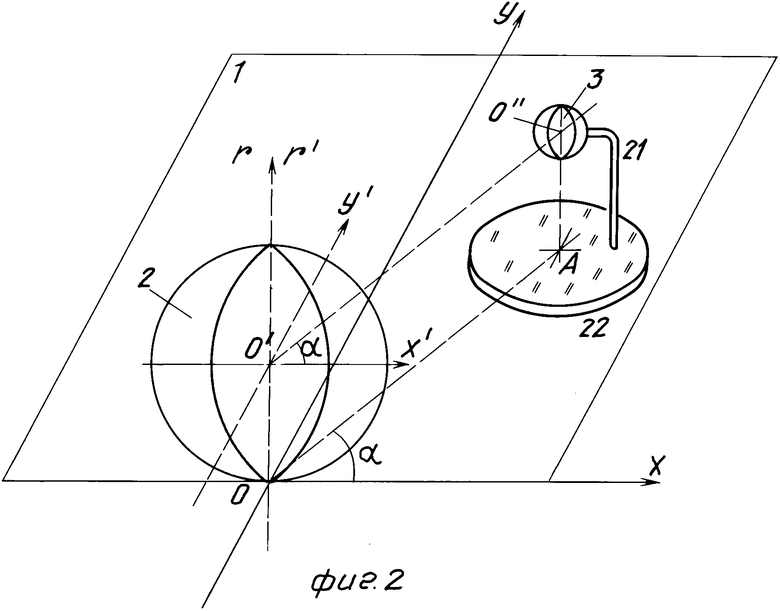
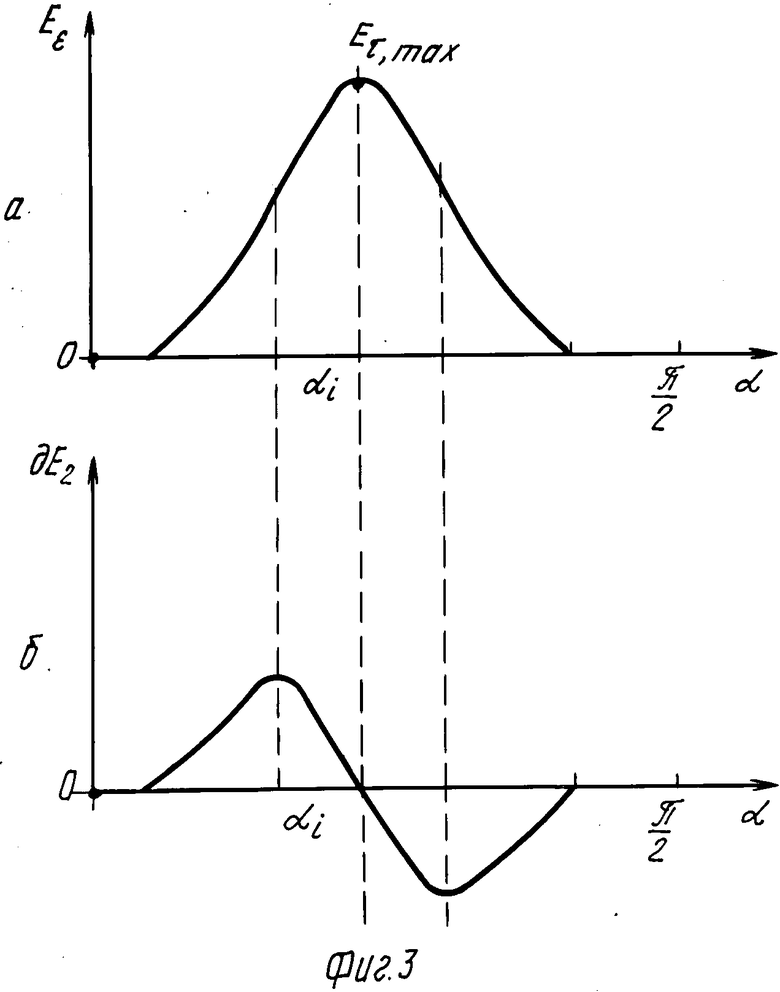
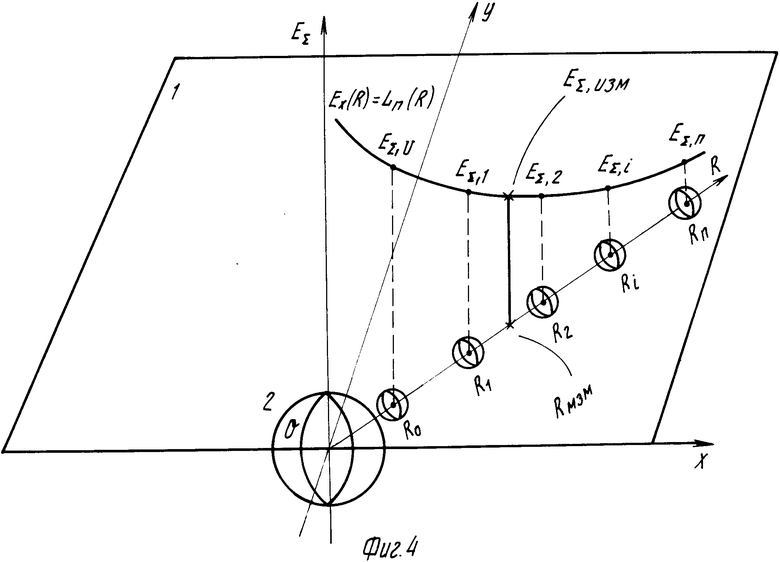
На фиг. 1 приведена функциональная схема устройства; на фиг.2 показан съемник координат; на фиг.3 представлены графики функции обобщенного информационного сигнала и его производной; на фиг.4 дан график зависимости сигнала от расстояния.
Устройство содержит планшет 1 с размещенными на нем индукционно связанными источником 2 переменного электромагнитного поля и съемником 3 координат, первый и второй блоки 4 и 5 ключей, генератор 6 синусоидального тока, фазовращатель 7, первый и второй усилители-квадраторы 8 и 9, аналоговый сумматор 10, аналоговый блок 11 памяти, аналого-цифровой преобразователь (АЦП) 12, вычислительный блок 13, дифференцирующий элемент 14, компаратор 15, триггер 16, генератор 17 одиночного импульса, блок 18 памяти функции синуса, элемент И 19 и генератор 20 тактовых импульсов. Источник 2 и съемник 3 выполнены каждый (фиг.2) в виде двух ортогональных катушек индуктивности, плоскости которых перпендикулярны плоскости планшета 1, а общие центры лежат на одной высоте над планшетом. Съемник 3 координат крепится жестко с помощью кронштейна 21 на основании 22, имеющем визирное перекрестье, при этом вертикальная проекция общего диаметра взаимно ортогональных катушек индуктивности съемника 3 совпадает с центром A визирного перекрестья.
Устройство работает следующим образом.
После установки привязочной точки A съемника 3 координат в выбранную точку считываемого изображения замыкается кнопка пуска, чем запускается генератор 17 одиночных импульсов, импульс с выхода которого производит начальные установки блока 11 и АЦП 12 и устанавливает триггер 16 управления в единичное положение. При этом сигналы с генератора 20 тактовых импульсов, пройдя через открытый элемент И 19, выдают из блока 18 записанные в нем цифровые значения функции синуса в диапазоне [0,2π ] в цифроаналоговый генератор 6 синусоидального тока, который преобразует последовательность значений функции синуса в токовый сигнал синусоидальной формы, поступающий в первую катушку индуктивности источника 2 переменного электромагнитного поля. Одновременно сигнал с выхода генератора 6 поступает на фазовращатель 7, с выхода которого в форме косинусоидального токового сигнала поступает во вторую катушку источника 2. При этом вектор магнитной индукции B суммарного магнитного поля двух возбуждаемых катушек индуктивности источника 2 вращается вокруг его центра в плоскости XOY, индуцируя в приемных катушках индуктивности съемника 3 координат сигналы ЭДС.
Отличительной чертой съемника 3 координат с двумя взаимно ортогональными катушками индуктивности, общий диаметр которых ориентирован перпендикулярно плоскости считывания, при таком же положении катушек источника 2 является инвариантность амплитуды его обобщенного информационного сигнала, формируемой как суммы квадратов амплитуд сигналов в каждой из приемных катушек к вращениям съемника 3 вокруг вертикальной оси (общего диаметра приемных катушек). Такая система двух катушек эквивалентна одной катушке, условно располагаемой перпендикулярно вектору B магнитной индукции поля в общем центре двух катушек индуктивности съемника 3 координат. При этом направление относительно оси OX радиуса-вектора R совпадает с направлением вектора B магнитной индукции поля (фиг.2) и направлением из центра O' излучателя суммарного магнитного поля на центр O'' приема последнего. Это приводит к тому, что при направлении радиуса-вектора на центр съемника 3 координат в последнем индуцируется сообщенный информационный сигнал максимальной амплитуды, так как в этом случае вектор  магнитной индукции поля образует с плоскостью эквивалентной катушки прямой угол, обеспечивающий максимум значения потока вектора
магнитной индукции поля образует с плоскостью эквивалентной катушки прямой угол, обеспечивающий максимум значения потока вектора  магнитной индукции через поверхность стягиваемой контуром эквивалентной катушки.
магнитной индукции через поверхность стягиваемой контуром эквивалентной катушки.
В связи с этим в процессе одновременного возбуждения двумя излучающими катушками источника 2 суммарного магнитного поля на выходе аналогового сумматора 10 появляется сигнал, амплитуда которого изменяется по кривой колоколообразной формы (фиг.3а) и достигает своего максимума при направлении радиуса-вектора непосредственно на центр съемника 3 координат. Абсолютное значение максимума амплитуды обобщенного информационного сигнала зависит от расстояния R и не зависит от ориентации катушек съемника 3 координат в плоскости XOY.
Для фиксирования этого положения (максимума амплитуды) и одновременно полярного угла α сигнал с выхода аналогового сумматора 10 дифференцируется элементом 14. Известно, что экстремуму функции (амплитуде обобщенного информационного сигнала) соответствует нулевое значение ее производной. Этот момент фиксируется компаратором 15, сравнивающим дифференцированный сигнал с нулевым пороговым уровнем. В момент сравнения компаратор 15 выдает сигнал, который запускает АЦП 12, на вход которого через блок 11 памяти к этому моменту поступил сигнал с выхода аналогового сумматора 10. Амплитуда обобщенного информационного сигнала преобразуется на АЦП 12 в цифровой код и через первый блок 4 ключей поступает в вычислительный блок 13. Одновременно по тому же сигналу с компаратора 15 через вторую группу вентилей передачи кода в вычислительный блок 13 поступает текущее цифровое значение функции sin α , а триггер 16 управления принимает нулевое состояние, соответствующее завершению цикла развертки считываемого изображения вращающимся магнитным полем.
По сигналу с компаратора 15 запускается в работу вычислительный блок 13, который выполняет следующие функции: преобразование кода амплитуды обобщенного информационного сигнала (кода радиуса-вектора точки считывания) в метрическое значение расстояния R; вычисление декартовых координат точки считывания по формулам x = R .cos α , y = R .sin α.
Первая операция заключается в решении обратной задачи интерполирования. Для этого в памяти вычислительного блока 13 хранятся в цифровом виде значения амплитуд обобщенного информационного сигнала, снятые экспериментально с помощью данного устройства в n равноотстоящих друг от друга точках при прямолинейном удалении съемника 3 координат от источника 2 переменного электромагнитного поля (фиг.4). По текущему измеренному значению амплитуды EΣ,i = l12 + l22 решением обратной задачи интерполирования находится соответствующая этому значению величина Ri. Вторая операция дополнительных пояснений не требует. По завершении этих операций вычислительный блок 13 выдает на выход декартовы координаты xi;yi точки считывания.
Для обеспечения максимальной крутизны фронтов колоколообразного обобщенного информационного сигнала на выходе аналогового сумматора 10, от которой непосредственно зависит точность определения момента перехода значения производной  через ноль, а следовательно, и точность устройства, съемник 3 помещается с помощью кронштейна 21 на основании 22 с визирным перекрестием так, чтобы центры O' и O'' соответственно излучающей и приемных систем лежали на прямой, параллельной плоскости планшета 1. При этом он жестко фиксируется в положении, при котором общий диаметр приемных катушек направлен на центр визирного перекрестья. При этом вектор
через ноль, а следовательно, и точность устройства, съемник 3 помещается с помощью кронштейна 21 на основании 22 с визирным перекрестием так, чтобы центры O' и O'' соответственно излучающей и приемных систем лежали на прямой, параллельной плоскости планшета 1. При этом он жестко фиксируется в положении, при котором общий диаметр приемных катушек направлен на центр визирного перекрестья. При этом вектор  магнитной индукции поля в процессе вращения вокруг точки O' пересекает плоскость эквивалентной приемной катушки индуктивности точно по диаметру последней, чем обеспечиваются максимальное значение потока вектора
магнитной индукции поля в процессе вращения вокруг точки O' пересекает плоскость эквивалентной приемной катушки индуктивности точно по диаметру последней, чем обеспечиваются максимальное значение потока вектора  через поверхность, стягиваемую приемным эквивалентным контуром, и соответственно максимальное значение индуцируемой ЭДС EΣ . При больших значениях функции EΣ (при той же длительности фронтов) облегчаются условия для точного анализа ее производной
через поверхность, стягиваемую приемным эквивалентным контуром, и соответственно максимальное значение индуцируемой ЭДС EΣ . При больших значениях функции EΣ (при той же длительности фронтов) облегчаются условия для точного анализа ее производной  , что непосредственно сказывается на точности определения значения αi, а следовательно, и итоговой точности измерений.
, что непосредственно сказывается на точности определения значения αi, а следовательно, и итоговой точности измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕОНОВИЧА СЧИТЫВАНИЯ ТРЕХМЕРНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2074419C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ КООРДИНАТ | 1991 |
|
RU2015565C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ КООРДИНАТ | 1991 |
|
RU2015564C1 |
| Устройство для считывания графической информации | 1981 |
|
SU953643A2 |
| Устройство для считываниягРАфичЕСКОй иНфОРМАции | 1978 |
|
SU798910A1 |
| Устройство для считывания графической информации | 1979 |
|
SU862153A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1018136A1 |
| Устройство для считывания графической информации | 1980 |
|
SU934513A1 |
| Устройство для считывания графической информации | 1981 |
|
SU985804A1 |
| Устройство для измерения полярных координат | 1980 |
|
SU883939A1 |
Изобретение относится к автоматике и вычислительной технике. Его использование в системах автоматизированного кодирования изображений позволяет повысить точность устройства. Это достигается благодаря тому, что электромагнитное поле, возбуждаемое в устройстве, вращается в горизонтальной плоскости за счет соответствующей запитки двух взаимоортогональных катушек индуктивности, а считывание координат осуществляется при фиксации в съемнике сигнала с нулевой производной. 1 з.п.ф-лы, 4 ил.
| Устройство для считываниягРАфичЕСКОй иНфОРМАции | 1978 |
|
SU798910A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
