Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в конструкции жаток и косилок для подъема пониклых и полегших стеблей культур и трав перед их срезанием.
Известен стеблеподъемник для полеглых стеблей к режущему аппарату, включающий установленные по направлению движения и под углом к горизонту замкнутые цепные контуры, на звеньях которых шарнирно установлены пальцы, направляющие для пальцев и кожух, расположенный в месте схода стеблей с пальцев, в котором каждый палец снабжен двумя дополнительными пальцами, которые расположены по обе стороны от основного и выполнены с возможностью ограниченного поворота относительно него в плоскости, поперечной к плоскости цепного контура дополнительные пальцы выполнены поворотными на угол равный 90 градусов. Основной и смежные с ним дополнительные пальцы смонтированы на звеньях посредством общего основания, поворотного в плоскости цепного контура стеблеподъемник снабжен системой подачи воздуха, воздуховоды которой расположены под рабочими ветвями цепных контуров и имеют на смежных сторонах щели для подачи воздуха вверх и в направлении подвода стеблей.
Описанный стеблеподъемник может применяться только для высоких стеблей культур и трав, т.к. он частично расположен над режущим аппаратом, при этом часть стеблей, поднимаемых центральным пальцем, будет опять приминаться кожухом к земле и тем самым увеличивать потери при уборке.
Кроме того, при уборке низких стеблей, например низкорослых колосовых культур, на режущий аппарат будет подаваться только колосок и малая часть стебля, в результате чего значительное их количество будет попадать в кожух и далее на землю даже при наличии мощной системы подачи воздуха. Еще одним недостатком описанного стеблеподъемника является то, что пальцы выходят из кожуха по направлению движения делителей, за счет этого скорость их движения выше скорости движения режущего аппарата (жатки, косилки и т.д.), что будет вызывать повреждение и разрыв стеблей, увеличивая потери урожая, а при встрече с твердыми частицами грунта (камнями, бугорками и т.п.) пальцы будут подвергаться интенсивному износу, а то и поломке.
Известен стеблеподъемник, включающий размещенный в его кожухе замкнутый цепной контур с шарнирно закрепленными на нем пальцами, огибающий ведущую и ведомую звездочки, направляющие элементы и носок-делитель, при этом в кожухе стеблеподъемника параллельно цепному контуру установлен дополнительный цепной контур с шарнирно закрепленными на нем пальцами, а направляющие элементы выполнены в виде щелей в боковых частях кожуха, при этом пальцы выполнены шарнирными, причем у основания каждый палец подпружинен, а ступица ведущей звездочки снабжена упором для изменения положения пальцев и, кроме того, цепные контуры снабжены промежуточными звездочками, установленными выше ведомых и ведущих звездочек, при этом конец каждой направляющей щели размещен над зоной цепного контура между промежуточной и ведущей звездочками, а также между цепными контурами установлен разделительный щиток, снабженный в передней части направляющими желобками.
Во время работы данного стеблеподъемника сходящиеся вверху пальцы будут сминать, рвать стебли и увлекать их в кожух, а это повлечет за собой попадание частиц стеблей в места шарнирного закрепления пальцев, нарушая их работу - это не считая пыли и грязи, которые неизбежно будут нарушать устойчивую работу пальцев, заклинивание и в конечном итоге к их поломке, а направление движения пальцев, совпадающее с направлением движения самого стеблеподъемника приведет к нежелательным последствиям, описанным выше.
Наиболее близким по технической сущности и достигаемому результату является стеблеподъемник для подъема и подвода стеблей к режущему аппарату, содержащий Г-образные пальцы меньшей полкой шарнирно закрепленные посредством промежуточных втулок на основных втулках, которые равномерно размещены на бесконечном гибком тяговом органе, ведущий и ведомый шкивы, выполненные с углублениями по наружному диаметру с шагом, равном шагу расположения втулок на тяговом органе, направляющие, установленные по контуру тягового органа для поворота в рабочей зоне пальцев в плоскости, перпендикулярной направлению движения тягового органа.
Недостатками прототипа являются: малая надежность в работе, обусловленная тем, что оси вращения шарниров, на которых закреплены пальцы, не совпадают с продольной осью тягового органа, в качестве которого используется цепь, т. е. с вектором тягового усилия, в результате чего цепь будет нагружена крутящим (при повороте на шарнире в направляющих ) и изгибающим (в плоскости, перпендикулярной к плоскости пластин цепи, проходящей через оси втулок цепей при подъеме стеблей) моментами, а это неизбежно приведет к преждевременному выходу цепей из строя, а значит и стеблеподъемника в целом. Этого можно избежать путем применения более прочных, а поэтому тяжелых цепей, но это, в свою очередь, потребует увеличение мощности привода режущего аппарата (жатки, косилки и т.п.), что нецелесообразно. Потери урожая при уборке пониклых и полегших культур с гладкими стеблями типа зерновых, вызванные тем, что пальцы стеблеподъемника подхватывают стебли только по одной линии, т.к. они касаются грунта именно в таком положении (перпендикулярно направлению движения делителей), а рядом лежащие стебли, расположенные вдоль направления движения делителей, не будут подхвачены - это объясняется сложным движением пальцев по окружности звездочки и по копирующей дорожке направляющих концов этих пальцев, которые опускаются ниже траектории их движения до соприкосновения с грунтом в одной точке прямой линии и сразу же поднимаются вверх с подхваченными стеблями.
Цель изобретения - повышение надежности в работе и снижение потерь при уборке культур и трав с гладкими стеблями.
Поставленная цель достигается тем, что, в стеблеподъемнике для подъема и подвода стеблей к режущему аппарату, тяговый орган выполнен в виде троса, а ось поворота Г-образных пальцев и оси промежуточных и основных втулок совмещены с осью троса, при этом пальцы выполнены из пружинной стали.
Наличие в конструкции стеблеподъемника тягового органа в виде троса в сочетании с конструктивным выполнением узла крепления пальцев на тросе с возможностью их поворота на оси, совпадающей с продольной осью троса, гарантирует надежность работы привода из-за отсутствия крутящих моментов, а в совокупности с Г-образными пальцами значительно снизит потери урожая при уборке пониклых и полегших культур и трав, имеющих гладкие стебли, типа зерновых - пшеница, рожь, овес и т.д.
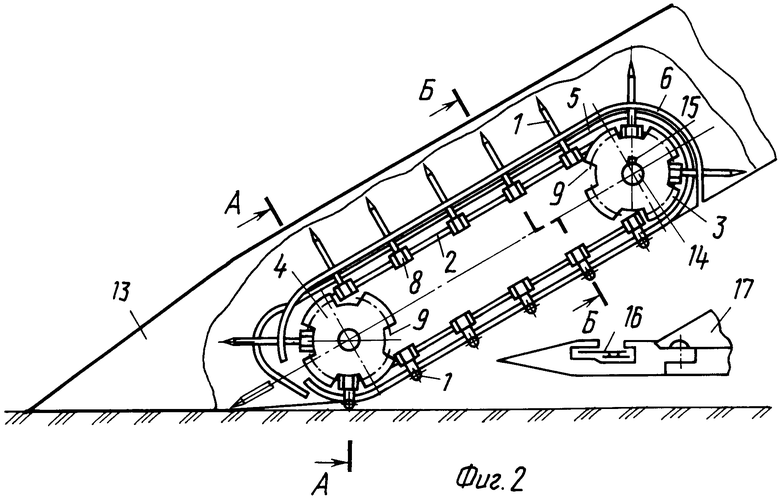
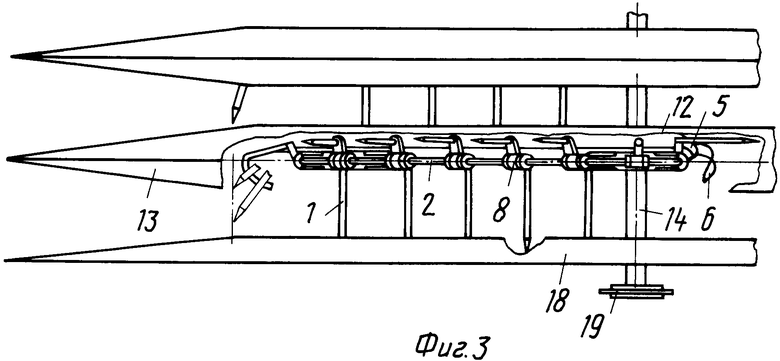
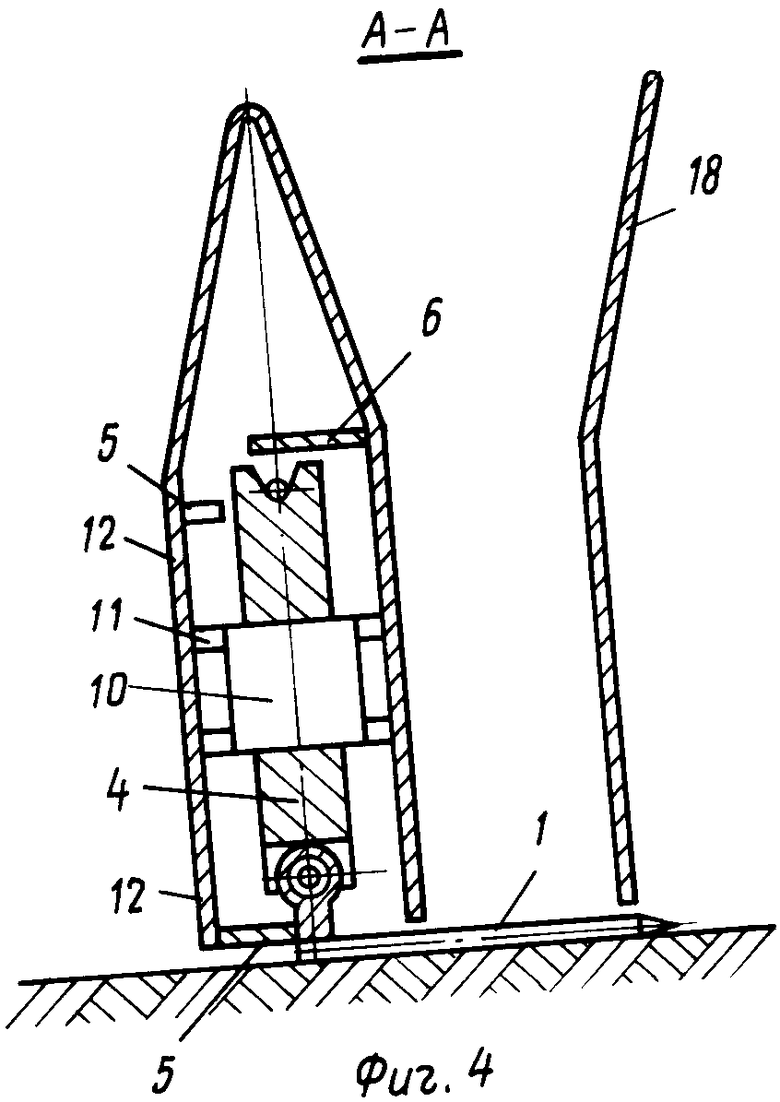
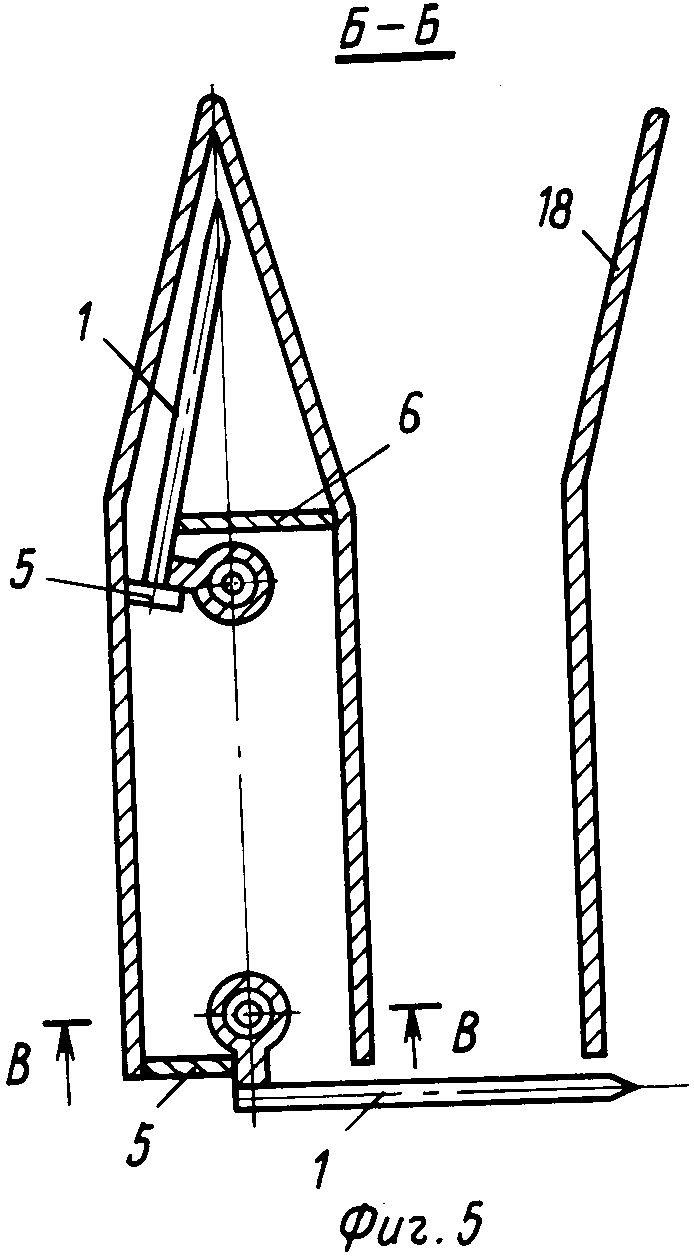
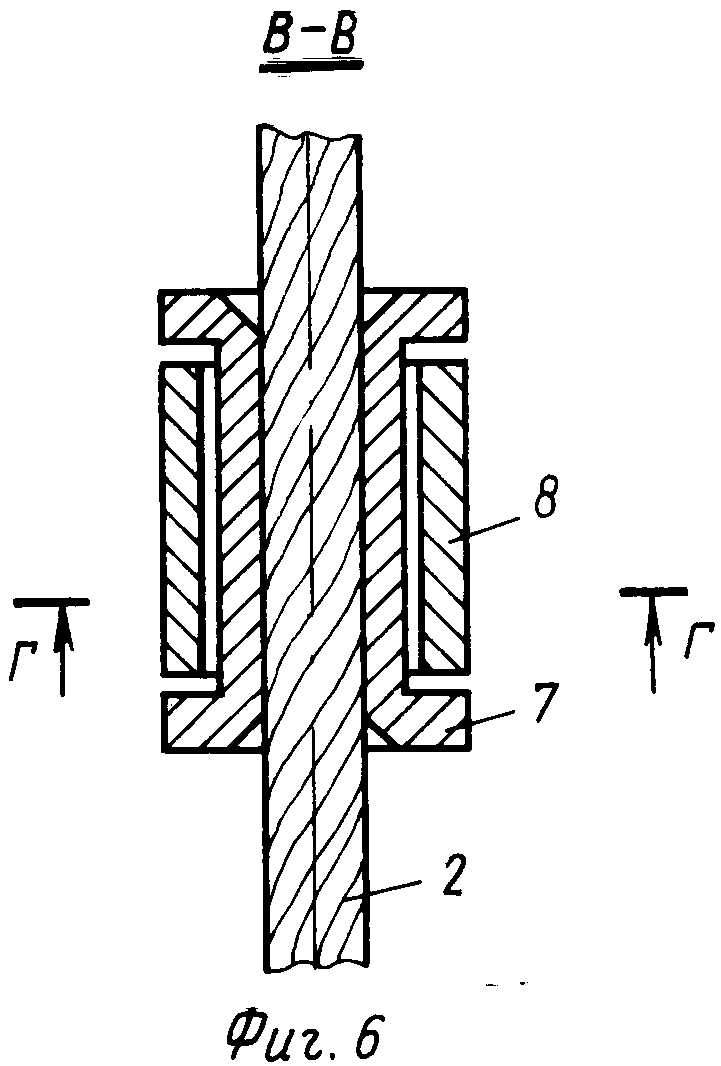
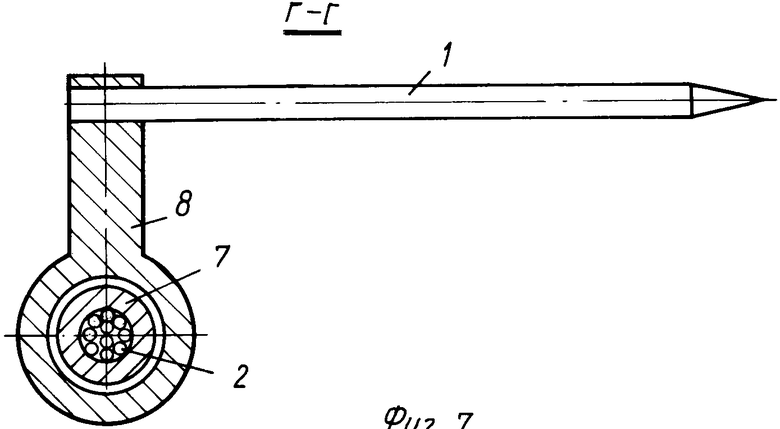
На фиг.1 изображен предлагаемый стеблеподъемник в аксонометрии; на фиг. 2 - кинематическая схема и взаимное расположение стеблеподъемника и режущего аппарата, вид сбоку; на фиг.3 - то же, вид сверху; на фиг.4 - разрез А-А на фиг.2; на фиг.5 - разрез Б-Б на фиг.2; на фиг.6 - разрез В-В на фиг. 5; на фиг.7 - разрез Г-Г на фиг.6.
Стеблеподъемник содержит пальцы 1 Г-образной формы, шарнирно-закрепленные на бесконечном гибком тяговом органе, в качестве которого используется металлический трос 2, огибающий ведущий 3 и ведомый 4 шкивы, а также направляющие элементы 5 и 6, установленные по контуру троса 2 под углом друг к другу и обеспечивающими в рабочей зоне поворот пальцев 1 в плоскости, перпендикулярной направлению движения троса 2. На тросе 2 неподвижно с определенным шагом установлены основные втулки 7, на которых при помощи промежуточных втулок 8 закреплены своими меньшими полками Г-образные пальцы 1 из пружинной стали с возможностью поворота вокруг оси, совпадающей с продольной осью троса 2. Ведущий 3 и ведомый 4 шкивы выполнены с углублениями 9 под основные втулки 7, при этом шаг углублений 9 на наружном диаметре (поверхности) упомянутых шкивов 3 и 4 соответствует шагу расположения основных втулок 7 на тросе 2. Ведомый шкив 4 установлен на оси 10, а его осевое перемещение относительно первоначального положения ограничено втулками 11. Описанный выше механизм смонтирован в корпусе 12, один конец которого выполнен в виде делителя 13, который служит для деления перепутанных стеблей (на черт. не показаны) на пряди. Стеблеподъемник набирается из секций, состоящих из механизмов, заключенных в корпуса 12, на общий вал 14, проходящий через центральное отверстие ведущего шкива 3. Шкивы 3 фиксируются на общем валу 14 от проворота любым известным способом, например при помощи шпонок 15. Ширина стеблеподъемника, т.е. ширина его захвата неограничена и может быть любой, но не ниже ширины режущего аппарата 16 жатки 17. Собранный стеблеподъемник запирается крайней секцией - крайним делителем 18. Для передачи крутящего момента на ведущие шкивы 3 служит звездочка 19, установленная на одном из концов вала 14. Для увеличения жесткости стеблеподъемника корпуса 12 секций могут быть связаны ребрами жесткости (на черт. не показаны).
Стеблеподъемник работает следующим образом.
При движении жатки 17 (шасси, на котором установлена жатка 17 на черт. не показано) по полю с пониклыми и полегшими стеблями культур и трав делители 13 поднимают те из стеблей, которые лежат поперек направления движения жатки, и вместе с остальными делят на узкие ряды или пряди. Эти узкие ряды стеблей культур или трав направляются делителями 13 в просвет между секциями стеблеподъемника в рабочую зону пальцев 1. В этой зоне концы пальцев 1, подчиняясь траектории, определяемой направляющими 5 и 6, коснувшись грунта, плавно скользят по нему по прямой, перпендикулярной к направлению движения жатки 17, до тех пор пока полностью не лягут на грунт, отделяя тем самым пучки стеблей в своих рядах или прядях между соседними секциями. А так как скорость движения пальцев 1 относительно грунта в рабочей зоне в направлении движения жатки 17, равна нулю (для сравнения: скорость движения пальцев 1 относительно грунта на верхней ветви троса 2 в направлении движения жатки 17 больше скорости движения жатки в два раза) при согласованной скорости движения жатки со скоростью движения троса 2, то пальцы 1, находясь в горизонтальном положении, начинают подниматься вверх со скоростью, определяемой углом наклона стеблеподъемника к горизонту и конфигурацией направляющих элементов 5 и 6. А так как пальцы 1 проходят над режущим аппаратом 16 жатки 17, то пучки стеблей неизбежно попадают на режущий аппарат и после их срезания - на транспортирующее устройство жатки 17. В связи с тем, что количество пальцев может быть сколько угодно, процесс подъема стеблей и подачи их к режущему аппарату приобретает непрерывный характер.
Привод исполнительных механизмов секций стеблеподъемника осуществляется через звездочку 19, вал 14 и шпонки 15 на ведущие шкивы 3, а затем на тросы 2 посредством углублений 9 в шкивах 3, 4 и основных втулок 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖАТКА-КОЛОСОУБОРКА | 2011 |
|
RU2467552C1 |
| ПРИСПОСОБЛЕНИЕ К ЖАТКЕ ДЛЯ ПОДЪЕМА И ПОДВОДА ПОЛЕГЛЫХ СТЕБЛЕЙ К РЕЖУЩЕМУ АППАРАТУ | 1996 |
|
RU2112352C1 |
| АКТИВНЫЙ САМООЧИЩАЮЩИЙСЯ СТЕБЛЕПОДЪЕМНИК | 2003 |
|
RU2259034C1 |
| АКТИВНЫЙ СТЕБЛЕПОДЪЕМНИК | 2003 |
|
RU2262830C2 |
| Режущий аппарат | 2015 |
|
RU2609907C1 |
| Зернобобовая жатка | 1982 |
|
SU1113031A1 |
| Активный делитель для жаток | 1960 |
|
SU135714A1 |
| ЖАТКА ДЛЯ УБОРКИ ПОДСОЛНЕЧНИКА | 2020 |
|
RU2733227C1 |
| МАШИНА ДЛЯ УБОРКИ РЯДКОВЫХ КУЛЬТУР, ПРЕИМУЩЕСТВЕННО СОИ | 2007 |
|
RU2340157C1 |
| ПНЕВМАТИЧЕСКАЯ ЗЕРНОУБОРОЧНАЯ МАШИНА | 1996 |
|
RU2097959C1 |
Использование: в сельскохозяйственном машиностроении, в частности стеблеподъемника жаток и косилок. Сущность изобретения: для повышения надежности устройства при снижении потерь при уборке стеблеподъемник для подъема и подвода стеблей к режущему аппарату имеет пальцы 1, шарнирно закрепленные на бесконечном тяговом органе, ведущий 3 и ведомый 4 шкивы, а также направляющие элементы 5 и 6. Последние установлены по контуру тягового органа под углом друг к другу с обеспечением в рабочей зоне поворота пальцев в плоскости, перпендикулярной направлению движения тягового органа. Этот орган выполнен в виде троса 2 с установленными неподвижно на нем с определенным шагом втулками 7, на которых установлены пальцы с возможностью поворота вокруг оси, совпадающей с осью троса. Ведущий 3 и ведомый 4 шкивы выполнены с ответными втулками 7 углублениями 9 по наружному диаметру, шаг которых соответствует шагу расположения втулок 7 на тросе 2. Пальцы выполнены Г-образной формы из пружинной стали и меньшей полкой шарнирно закреплены на втулках 7 посредством промежуточных втулок 8. 7 ил.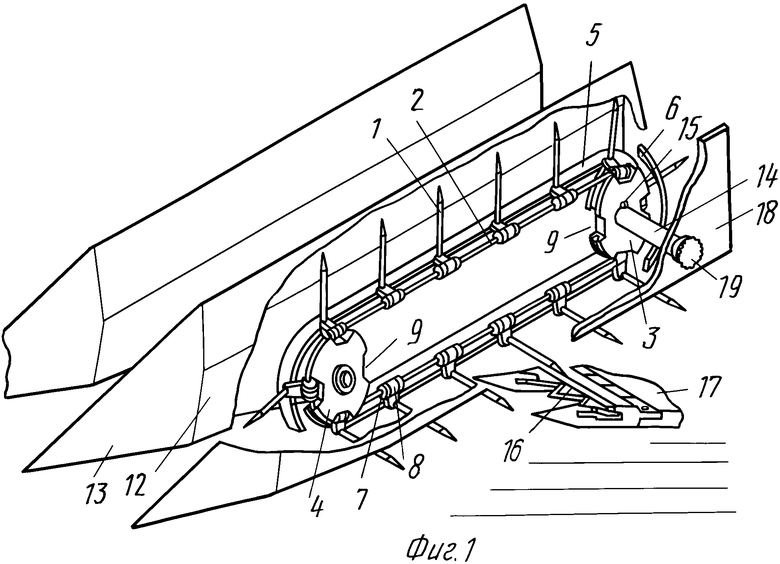
СТЕБЛЕПОДЪЕМНИК ДЛЯ ПОДЪЕМА И ПОДВОДА СТЕБЛЕЙ К РЕЖУЩЕМУ АППАРАТУ, содержащий Г-образные пальцы, меньшей полкой шарнирно закрепленные посредством промежуточных втулок на основных втулках, которые равномерно размещены на бесконечном гибком тяговом органе, ведущий и ведомый шкивы, выполненные с углублениями по наружному диаметру с шагом, равном шагу расположения втулок на тяговом органе, направляющие, установленные по контуру тягового органа для поворота в рабочей зоне пальцев в плоскости, перпендикулярной к направлению движения тягового органа, отличающийся тем, что тяговый орган выполнен в виде троса, а ось поворота Г-образных пальцев и оси промежуточных и основных втулок совмещены с осью троса, при этом пальцы выполнены из пружинной стали.
| Авторское свидетельство СССР N 226332, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
