Изобретение относится к авиастроению и может быть использовано в системах управления полетами летательных аппаратов.
Известны системы управления полетом, в которых контроль состояния параметров полета производится путем экспертной оценки.
Наиболее близким техническим решением является система формирования сигналов управления полетом летательного аппарата, содержащем N датчиков параметров полета, с n информационными входами и m выходами по разовым сигналам, мультиплексор, входы которого соединены с соответствующими выходами датчиков параметров полета и дешифратор, вход которого соединен через магистраль кодового обмена с выходом мультиплексора. Контроль состояния параметров полета в такой системе осуществляется на основе анализа разовых сигналов, осуществляемого после полета по данным ЗЧ. Однако известная система формирования сигналов управления обладает низкой точностью и надежностью в связи с невозможностью оперативной оценки достоверности параметров полета и выбора той или иной программы полета в зависимости от работоспособности датчиков. Целью изобретения является повышение точности и надежности формирования сигналов управления полетом.
На чертеже представлена система формирования сигналов управления полетом летательного аппарата, где N датчиков 1 параметров полета с n информационными выходами и m выходами по разовым сигналам; мультиплексор 2; магистраль 3 кодового обмена; дешифратор 4; блок 5 задания программы полета; блок 6 cинхронизации; блок 7 задания эталонных значений параметров; N˙n блоков 8 анализа аппаратурной достоверности физического параметра полета; N. m блоков 9 анализа аппаратурной достоверности разового сигнала; N˙n блоков 10 анализа функциональной достоверности физического параметра полета; N˙n блоков 11 анализа суммарной достоверности физического параметра полета. N блоков 12 формирования интегральной оценки состояния датчика; долговременное запоминающее устройство 13; N блоков 14 формирования оптимальных оценок состояния датчиков; N блоков 15 прогноза состояния датчика параметра полета; N блоков 16 формирования сигнала коррекции показаний датчика; N блоков 17 принятия решения о состоянии датчика; блок 18 задания текущих предельных значений параметров полета; блок 19 индикации; оперативное запоминающее устройство 20; блок 21 принятия решения о функциональном состоянии всех датчиков; блок 21 принятия решения о функциональном состоянии всех датчиков; блок 22 формирования вероятностной оценки работы датчиков; блок 23 формирования сигналов управления. При этом n информационных и m выходов по разовым сигналам датчиков соединены через последовательно соединенные мультиплексор и магистрали кодового обмена с дешифратором, первый - n выходы дешифратора по сигналам физических параметров по каждому датчику соединены соответственно с первым входом каждого блока анализа аппаратурной достоверности физического параметра соответственно, с первым входом каждого блока анализа функциональной достоверности физического параметра и с соответствующими входами блоков формирования оптимальных оценок состояния датчиков, первый - m выходы дешифратора по разовым сигналам соединены с первыми входами каждого блока анализа аппаратурной достоверности разового сигнала, выходы соответствующих блоков анализа аппаратурной достоверности физического параметра и функциональной достоверности соединены со входами соответствующих блоков анализа суммарной достоверности физического параметра, выходы которых и выходы соответствующих блоков анализа аппаратурной достоверности разового сигнала соединены с соответствующими входами соответствующих блоков формирования интегральной оценки состояния датчика, выходы которых, через последовательно соединенные блоки формирования оптимальных оценок состояния датчика, прогноза состояния датчика параметра полета, формирования сигнала коррекции показаний датчика и принятия коррекции показаний датчика и принятие решения о состоянии датчика, соединены с соответствующими входами блока принятия решения о функциональном состоянии всех датчиков, выход которого через блок формирования вероятностной оценки работы датчиков соединен с первым входом блока формирования сигналов управления, выход соответствующих блоков формирования оптимальных оценок состояния датчиков соединен со вторым входом соответствующих блоков формирования сигнала коррекции показаний датчиков, входы блока индикации и оперативного запоминающего устройства соединены с выходом блока принятия решения о функциональном состоянии всех датчиков, выход блока задания программы полета соединен с соответствующими входами блока задания эталонных значений параметров, блока формирования текущих предельных значений параметров и блока формирования сигнала управления, выход синхронизатора соединен с синхровходами блоков задания программы полета, блока задания эталонных значений, блока формирования текущих предельных значений и cинхровходами всех блоков формирования интегральной оценки состояния датчика и блоков формирования оптимальных оценок, соответствующие выходы блока формирования текущих предельных значений соединены с соответствующими входами всех блоков прогноза cоcтояния датчика, cоответcтвующие входы блока задания эталонных значений параметров соединены с соответствующими входами блоков анализа аппаратурной достоверности разового сигнала и физических параметров по каждому параметру датчиков, блоков формирования сигнала коррекции и блоков принятия решения о состоянии датчика, входы долговременного запоминающего устройства соединены с выходами всех блоков анализа аппаратурной достоверности разового сигнала, блоков анализа суммарной достоверности физического параметра, блоков прогноза состояния датчика и блоков формирования сигнала коррекции показаний датчика, а также со всеми выходами дешифратора.
Система работает следующим образом.
Текущая информация (в цифровом виде) о параметрах полета, а также разовые сигналы, соответствующие работе в том или ином режиме, поступают с n информационных и m выходов по разовым командам N датчиков 1 параметров полета (например, ВВС, БИНС, РВ, САС и т.д.) на (n˙N + m˙N) входы мультиплексора 2 и через магистраль кодового обмена или шину 3 передачи данных на вход дешифратора 4, где дешифруется из векторной формы и подается на n˙N + m˙N выходов, которые соединены в свою очередь с n ˙N блоками анализа аппаратурной достоверности параметров полета 8 и m˙N блоками 9 анализа аппаратурной достоверности разового сигнала. В блоках 8 и 9 осуществляется расчет коэффициента аппаратурной достоверности
Kijaп =  где nxj =
где nxj = 
m - количество измерений на интервале.
Т. е. на заданном интервале анализируемого параметра с его эталонным значением, полученным соответственно с первого и второго выходов блока задания эталонных параметров 7, соединенными со вторыми входами блоков 8 и 9, блок задания эталонных параметров 7 по поступающей с выхода блока задания программы полета 5 текущей программе полета, заданной либо функциональными зависимостями всех параметров полета от времени (Х = Х(t)), либо в виде таблиц значений формирует срез всех параметров на данный момент (принимаемых за необходимые эталонные значения), определяет режим работы ( предполетная подготовка, маршрут, . ..), формирует эталонный разовый сигнал и эталонный пороговый максимальный сигнал, n ˙ N блоков 10 на первый вход которых подается сигнал текущего параметра полета, а на второй вход эталонное пороговое значение параметра формирует сигнал достоверности физического значения параметра путем сравнения на заданном интервале текущего приращения значения параметра с эталонным пороговым значением приращения,
Kijф =  , где Kj =
, где Kj = 
 где ΔXij = Xi(j + 1) - Xij, δдопj = δдоп(j + 1) - δдопj;
где ΔXij = Xi(j + 1) - Xij, δдопj = δдоп(j + 1) - δдопj;
m - количество полных замеров на интервале измерений. В n ˙ N блоках 11 анализа суммарной достоверности физического параметра происходит формирование оценки суммарной достоверности на основе поступившей на первый вход оценки функциональной достоверности (с блока 10), а на второй вход оценки аппаратурной достоверности (с выхода блока 8), по следующему алгоритму:
Kид = 

N блоков формирования интегральной оценки состояния датчика (12) представляет собой, например n параллельных логических блоков "И", на первый и второй входы которых поступает информация соответственно с блока 11 и блока 9 о состоянии того или иного физического параметра, в данном блоке выходной сигнал представляет собой логическую "1" или "0", являющиеся управляющими сигналами для обеспечения формирования оптимальных оценок состояния в N блоках 14, представляющих собой n параллельно функционирующих фильтров Калмана, на информационные входы которых подаются физические параметры с соответствующих выходов дешифратора 4, и при наличии "1" на управляющем выходе производится расчет оптимальных оценок с помощью стандартных рекуррентных соотношений фильтра Калмана: (t) = F(t)X(t) + H(t)ν(t) + B(t)W(t).
(t) = F(t)X(t) + H(t)ν(t) + B(t)W(t).
Выходным сигналом блоков является N векторов оптимальных оценок δ1(1) состояния датчиков, который поступает на первые входы N блоков 15 прогноза состояния датчика параметра полета, на второй вход который с задатчика 18 текущих предельных значений параметров полета, соединенного с блоком 5 задания программы полета, поступает вектор текущих предельных значений параметров полета по каждому датчику. В блоках 15 осуществляется сравнение векторов оценок и векторов текущих предельных значений параметров полета, при выходе оценок за допустимое значение на выходе блока 15 появляется логическая "1", а на выходе - логический "0", т.е. выходной сигнал блока 15 представляет собой последовательность логических значений, соответствующих тем или иным параметрам полета по каждому датчику.
N блоков формирования коррекции показания датчика Ф 16 первый вход которого соединен с первым входом блока 7 эталонных значений параметров, второй с выходом блока 14 формирования оптимальных оценок, третий с выходом блока 15 прогноза состояния датчика параметров формирует вектор корректирующих поправок  = Хэт-
= Хэт-  тех параметров, которые не вышли за предельно допустимые значения, и подает их на второй вход блока принятия решения о состоянии датчика 17, на первый вход которого поступает информация с первого выхода блока 7 эталонных значений, где происходит покомпонентное сравнение вектора коррекции с вектором состоянии, при не выходе за допустимые значения это соответствует "1", выходе "0", определяется общее количество "0" и "1" и если количество "1" больше чем количество "0" (или = 0) на выходе блока 17 - логическая "1", в противном случае "0", данная информация о состоянии каждого датчика с выходом N блоков 17 поступает на N входов блока 21, где формируется в вектор исправности (например, 1,0...1,1...0...0) поступающей на блок 22 формирования вероятностной оценки работы датчиков ЛА, представляющий собой блок умножения на столбец априорно заданных весовых коэффициентов важности датчиков, общий коэффициент возможности дальнейшего функционирования всех систем ЛА поступает в блок 23 формирования сигналов управления, где в зависимости от данного коэффициента формируется либо программно-заданное управление, либо переход на запасную программу, либо сигнал аварийного состояния - заход на посадку (на запасной аэродром).
тех параметров, которые не вышли за предельно допустимые значения, и подает их на второй вход блока принятия решения о состоянии датчика 17, на первый вход которого поступает информация с первого выхода блока 7 эталонных значений, где происходит покомпонентное сравнение вектора коррекции с вектором состоянии, при не выходе за допустимые значения это соответствует "1", выходе "0", определяется общее количество "0" и "1" и если количество "1" больше чем количество "0" (или = 0) на выходе блока 17 - логическая "1", в противном случае "0", данная информация о состоянии каждого датчика с выходом N блоков 17 поступает на N входов блока 21, где формируется в вектор исправности (например, 1,0...1,1...0...0) поступающей на блок 22 формирования вероятностной оценки работы датчиков ЛА, представляющий собой блок умножения на столбец априорно заданных весовых коэффициентов важности датчиков, общий коэффициент возможности дальнейшего функционирования всех систем ЛА поступает в блок 23 формирования сигналов управления, где в зависимости от данного коэффициента формируется либо программно-заданное управление, либо переход на запасную программу, либо сигнал аварийного состояния - заход на посадку (на запасной аэродром).
U = 

 8
8
В системе также имеются два запоминающих устройства - долговременное запоминающее устройство 13 для хранения информации о параметрах полета, входы которого соединены с выходами N ˙ n блоков 11, N ˙ m блоков 9, а тажте всеми выходами дешифратора 4 и оперативное ЗУ 20, вход которого соединен с выходом блока 21, а также блок индикации 19, на котором осуществляется световая индикация экипажу неисправных датчиков параметров полета. Синхронизирующее устройство 6 тактирует поступления информации по всем блокам системы, выходы его соединены с соответствующими синхровходами блоков 5, 7, 12, 14, 18.
Использование системы формирования сигналов управления полетом ЛА со встроенным контролем состояния параметров полета позволит повысить достоверность оперативного контроля текущих параметров полета практически на 100% увеличить надежность и вероятность безотказной работы всей системы управления. Проведенное полунатурное моделирование данной системы для тяжелого транспортного самолета показало также ряд экономических преимуществ предложения по сравнению с прототипом: снижение расхода горючего до 10%, увеличение эффективной дальности полета до 10%, повышение вероятности экспертной оценки работоспособности бортовой системы близка к 1.
СИСТЕМА ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащая N датчиков параметров полета с n информационными выходами и m выходами по разовым сигналам, мультиплексор, входы которого соединены с соответствующими выходами датчиков параметров полета, и дешифратор, вход которого соединен через магистраль кодового обмена с выходом мультиплексора, отличающаяся тем, что, с целью обеспечения контроля параметров полета и функционального состояния датчиков параметров полета, а также повышения точности и надежности формирования сигналов управления, в нее введены N каналов, каждый из которых содержит n блоков анализа аппаратурной достоверности физического параметра, n блоков анализа функциональной достоверности физического параметра, n блоков анализа суммарной достоверности физического параметра, m блоков анализа аппаратурной достоверности разовых сигналов, последовательно соединенные блок формирования интегральной оценки состояния датчика, блок формирования оптимальной оценки состояния датчика, блок прогноза состояния датчика, блок формирования сигнала коррекции показаний датчика, второй вход которого соединен с выходом блока формирования оптимальных оценок состояния датчика и блок принятия решения о состоянии датчика, при этом входы n блоков анализа функциональной достоверности и n блоков анализа аппаратурной достоверности физического параметра каждого канала соединены соответственно с первым - N · n выходами дешифратора по сигналам физического параметра, а выходы - с первым и вторым входами n блоков анализа суммарной достоверности физического параметра каждого канала соответственно, входы m блоков анализа аппаратурной достоверности разового сигнала каждого канала соединены соответственно с первым - N · m выходами дешифратора по разовым сигналам, выходы n блоков анализа суммарной достоверности физического параметра и m блоков анализа аппаратурной достоверности разовых сигналов соединены с первым - n + m входами блока формирования интегральной оценки состояния датчика каждого канала, первый - n · N - выходы дешифратора по сигналам физического параметра соединены также с вторым - n + 1 входами блока формирования оптимальных оценок состояния датчика параметра полета каждого канала, выходы которых соединены соответственно с вторыми входами блоков формирования сигнала коррекции показаний датчика каждого канала, а также в систему введены последовательно соединенные блок принятия решения о функциональном состоянии всех датчиков, первый - N входы которого соединены с выходами блоков принятия решения о состоянии датчика каждого канала, блок формирования вероятностной оценки работы датчиков и блок формирования сигналов управления, последовательно соединенные блок задания программы полета и блок формирования эталонных значений параметров, блок задания текущих предельных значений параметров полета, вход которого соединен с выходом блока задания программы полета, а первый - N выходы с вторыми входами блоков прогноза состояния датчика параметра полета каждого канала соответственно, блок синхронизации, выход которого соединен с синхровходами блока задания программы полета, блока формирования эталонных значений параметров и блока задания текущих предельных значений параметров полета, а также с синхровходами блоков формирования интегральной оценки состояния датчиков и блоков формирования оптимальных оценок состояния датчиков каждого канала, блок индикации и оперативное запоминающее устройство, входы которых соединены с выходом блока принятия решения о функциональном состоянии всех датчиков, долговременное запоминающее устройство, первый - k входы которого соединены со всеми выходами дешифратора по сигналам физических параметров, выходами всех блоков анализа аппаратурной достоверности разовых сигналов, выходами всех блоков анализа суммарной достоверности физических параметров полета, выходами всех блоков прогноза состояния датчика параметров полета, выходами всех блоков формирования сигнала коррекции показаний датчика, выход блока задания программы полета соединен с вторым входом блока формирования сигналов управления, первый - m · N выходы блока формирования эталонных значений параметров по разовым эталонным сигналам соединены соответственно с вторыми входами первого - m блока анализа аппаратурной достоверности разового сигнала каждого канала, первый - n · N выходы по сигналу эталонных физических параметров - со вторыми входами первого - n блока анализа аппаратурной достоверности физического параметра полета каждого канала, первый - n · N выходы по сигналу эталонного порогового значения параметра - с вторыми входами первого - n блока анализа функциональной достоверности физического параметра полета каждого канала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ КАЧЕСТВА ПИЛОТИРОВАНИЯ САМОЛЕТА ЛЕТЧИКОМ | 1998 |
|
RU2136046C1 |
| Устройство для управления двигательными функциями спортсмена в процессе обучения | 1979 |
|
SU786987A1 |
| СИСТЕМА ПОДГОТОВКИ ДАННЫХ ДЛЯ АНАЛИЗА РЕЗУЛЬТАТОВ ПИЛОТИРОВАНИЯ | 2001 |
|
RU2179744C1 |
| УСТРОЙСТВО ДЛЯ ПРОГНОЗИРОВАНИЯ СЛУЧАЙНЫХ СОБЫТИЙ | 2020 |
|
RU2763126C1 |
| СИСТЕМА ФОРМИРОВАНИЯ РЕЗЕРВНОЙ ИНФОРМАЦИИ О ПРОСТРАНСТВЕННОМ ПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2324623C1 |
| Устройство для контроля объектов | 1990 |
|
SU1725233A1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ПСИХОФИЗИОЛОГИЧЕСКОГО СОСТОЯНИЯ ОПЕРАТОРА В ПРОЦЕССЕ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2091057C1 |
| Устройство для предварительной обработки электроразведочных сигналов | 1986 |
|
SU1539708A1 |
| Устройство для прогнозирования случайных событий | 2019 |
|
RU2705010C1 |
| СПОСОБ ОПЕРАТИВНОЙ ОЦЕНКИ ЭФФЕКТИВНОСТИ ПОРАЖАЮЩЕГО ДЕЙСТВИЯ БОЕПРИПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2442104C1 |
Изобретение относится к авиастроению и может быть использовано в системах управления полетом летательного аппарата (ЛА). Цель изобретения - повышение точности и надежности формирования сигналов управления полетом. Для этого система формирования сигналов управления полетом ЛА дополнительно снабжена N n блоками анализа функциональной 8 и аппаратурной 9 достоверности физического параметра полета, первые входы которых соединены также с соответствующими входами дешифратора 4, N m блоками анализа суммарной достоверности физического параметра полета 11, N блоками анализа аппаратурной достоверности разовых сигналов 9, первые входы которых соединены с соответствующими выходами дешифратора 4, N блоками формирования оптимальных оценок состояния датчика 14, N блоками формирования коррекции показаний датчика 16, N блоками принятия решения о состоянии датчика 17, блоком принятия решения о функциональном состоянии всех датчиков 21, блоком формирования сигнала управления 23, блоком задания программы полета 5, N блоком формирования эталонных значений текущих параметров, оперативным 13 и долговременным 20 запоминающими устройствами, блоком индикации 19, блоком задания текущих предельных значений параметров полета 18 и блоком синхронизации и определенными связями между ними. 1 ил.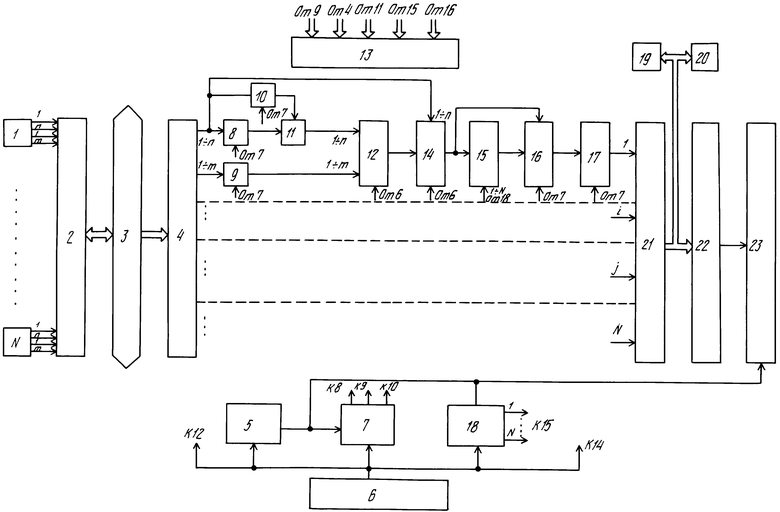
СИСТЕМА ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащая N датчиков параметров полета с n информационными выходами и m выходами по разовым сигналам, мультиплексор, входы которого соединены с соответствующими выходами датчиков параметров полета, и дешифратор, вход которого соединен через магистраль кодового обмена с выходом мультиплексора, отличающаяся тем, что, с целью обеспечения контроля параметров полета и функционального состояния датчиков параметров полета, а также повышения точности и надежности формирования сигналов управления, в нее введены N каналов, каждый из которых содержит n блоков анализа аппаратурной достоверности физического параметра, n блоков анализа функциональной достоверности физического параметра, n блоков анализа суммарной достоверности физического параметра, m блоков анализа аппаратурной достоверности разовых сигналов, последовательно соединенные блок формирования интегральной оценки состояния датчика, блок формирования оптимальной оценки состояния датчика, блок прогноза состояния датчика, блок формирования сигнала коррекции показаний датчика, второй вход которого соединен с выходом блока формирования оптимальных оценок состояния датчика и блок принятия решения о состоянии датчика, при этом входы n блоков анализа функциональной достоверности и n блоков анализа аппаратурной достоверности физического параметра каждого канала соединены соответственно с первым - N · n выходами дешифратора по сигналам физического параметра, а выходы - с первым и вторым входами n блоков анализа суммарной достоверности физического параметра каждого канала соответственно, входы m блоков анализа аппаратурной достоверности разового сигнала каждого канала соединены соответственно с первым - N · m выходами дешифратора по разовым сигналам, выходы n блоков анализа суммарной достоверности физического параметра и m блоков анализа аппаратурной достоверности разовых сигналов соединены с первым - n + m входами блока формирования интегральной оценки состояния датчика каждого канала, первый - n · N - выходы дешифратора по сигналам физического параметра соединены также с вторым - n + 1 входами блока формирования оптимальных оценок состояния датчика параметра полета каждого канала, выходы которых соединены соответственно с вторыми входами блоков формирования сигнала коррекции показаний датчика каждого канала, а также в систему введены последовательно соединенные блок принятия решения о функциональном состоянии всех датчиков, первый - N входы которого соединены с выходами блоков принятия решения о состоянии датчика каждого канала, блок формирования вероятностной оценки работы датчиков и блок формирования сигналов управления, последовательно соединенные блок задания программы полета и блок формирования эталонных значений параметров, блок задания текущих предельных значений параметров полета, вход которого соединен с выходом блока задания программы полета, а первый - N выходы с вторыми входами блоков прогноза состояния датчика параметра полета каждого канала соответственно, блок синхронизации, выход которого соединен с синхровходами блока задания программы полета, блока формирования эталонных значений параметров и блока задания текущих предельных значений параметров полета, а также с синхровходами блоков формирования интегральной оценки состояния датчиков и блоков формирования оптимальных оценок состояния датчиков каждого канала, блок индикации и оперативное запоминающее устройство, входы которых соединены с выходом блока принятия решения о функциональном состоянии всех датчиков, долговременное запоминающее устройство, первый - k входы которого соединены со всеми выходами дешифратора по сигналам физических параметров, выходами всех блоков анализа аппаратурной достоверности разовых сигналов, выходами всех блоков анализа суммарной достоверности физических параметров полета, выходами всех блоков прогноза состояния датчика параметров полета, выходами всех блоков формирования сигнала коррекции показаний датчика, выход блока задания программы полета соединен с вторым входом блока формирования сигналов управления, первый - m · N выходы блока формирования эталонных значений параметров по разовым эталонным сигналам соединены соответственно с вторыми входами первого - m блока анализа аппаратурной достоверности разового сигнала каждого канала, первый - n · N выходы по сигналу эталонных физических параметров - со вторыми входами первого - n блока анализа аппаратурной достоверности физического параметра полета каждого канала, первый - n · N выходы по сигналу эталонного порогового значения параметра - с вторыми входами первого - n блока анализа функциональной достоверности физического параметра полета каждого канала.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Daty Asqursition Systems, 1985y, Damien V UAM, SFIM, Unit for 8 aring 42S Line, R2565. | |||

