Изобретение относится к авиационной технике и может быть использовано в пилотажных комплексах для обучения и тренировки летного состава.
Известна система предупреждения столкновений летательных аппаратов, в которой присутствует система подготовки данных для анализа результатов пилотирования, содержащая средства автоматического определения начала и конца участков полета, выполненные с возможностью выявления участков с установившимся и неустановившимся режимами пилотирования, и выявления участков входа и выхода на соответствующий участок, средство сравнения текущих значений параметров полета с заданными, связанное со средством выявления отклонений от заданных значений параметров, и средства вычисления количественных оценок за прохождение участков пилотирования и полет в целом (RU 2134911 G 08 G 7/02, 20.08.1999).
Техническим результатом, на достижение которого направлено изобретение, является обеспечение повышения точности оценки результатов в процессе обучения пилотов.
Технический результат достигается тем, что система подготовки данных для анализа результатов пилотирования, содержащая средства автоматического определения начала и конца участков полета, выполненные с возможностью выявления участков с установившимся и неустановившимся режимами пилотирования, и выявления участков входа и выхода на соответствующий участок, средство сравнения текущих значений параметров полета с заданными, связанное со средством выявления отклонений от заданных значений параметров, и средства вычисления количественных оценок за прохождение участков пилотирования и полет в целом, снабжена связанными со средством автоматического определения начала и конца участков полета средством интерпретации заданий полета в виде упорядоченного множества элементов полета, каждый из которых представляет собой участок полета и соответствующие ему параметры, отражающие состояние модели системы "летчик - воздушное судно - среда", средством выделения на участках полета совокупности параметров, значения которых заданы в полетном задании, связанным со средством сравнения текущих значений параметров полета с заданными средством задания признаков эталонной ошибки, при этом средства вычисления количественных оценок за прохождение участков пилотирования связаны со средствами выявления характерных ошибок пилотирования.
Понятие автоматизации приемов обучения пилотированию имеет смысл там, где основные функции наблюдения и подготовки данных о ходе обучения осуществляются в автоматическом режиме, а окончательное решение о ходе обучения принимает инструктор. Основными функциями технических средств, выполняемых в автоматическом режиме и не требующими вмешательства инструктора, являются следующие:
- регистрация параметров, характеризующих процесс обучения пилотированию;
- определение начала и конца участков полета;
- сравнение текущих значений параметров полета с заданными их значениями;
- выявление отклонений от заданных значений параметров;
- выявление характерных ошибок пилотирования;
- вычисление количественных оценок за участки пилотирования, элементы и полет в целом.
Пример конкретного выполнения устройства иллюстрируется следующими графическими материалами.
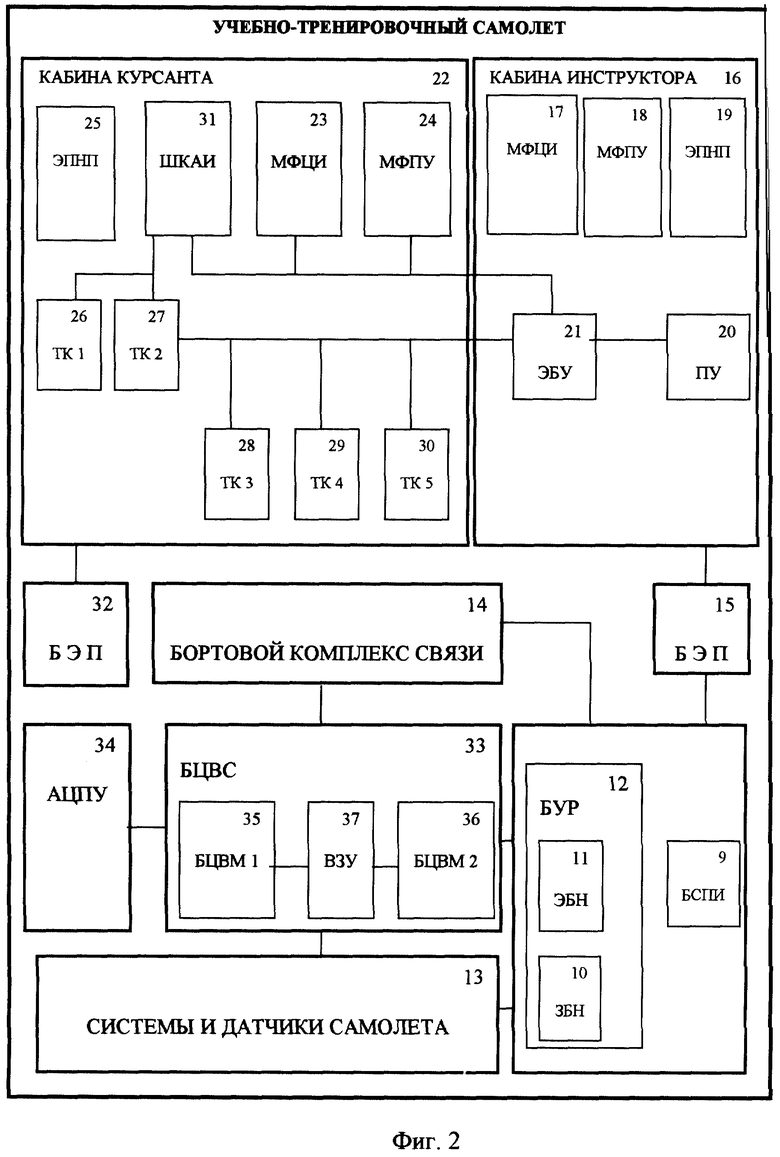
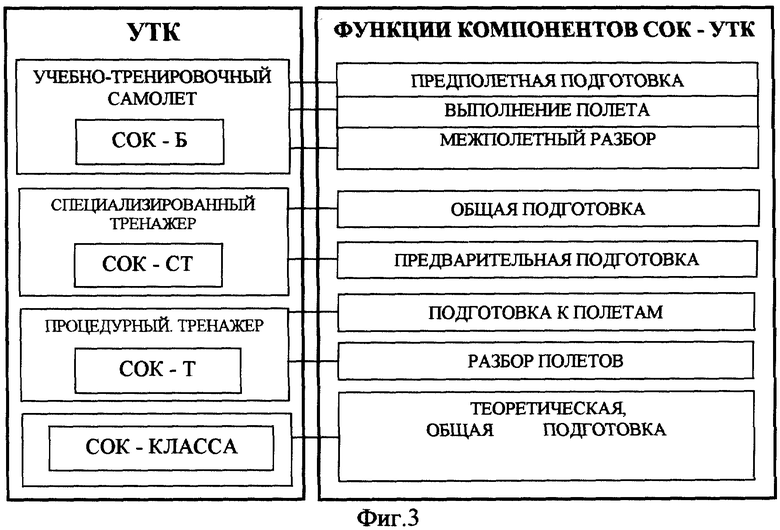
На фиг.1 представлена функциональная схема системы подготовки данных для анализа результатов пилотирования, на фиг.2 изображена структурная схема системы объективного контроля - СОК-Б, обеспечивающая автоматизацию подготовки данных, на базе которой выполнена заявленная система; на фиг.3 представлена схема автоматизации основных этапов обучения пилотированию; на фиг.4 показана иерархическая структура компонентов пилотирования; на фиг.5 - схема участков полета по кругу.
Система подготовки данных для анализа результатов пилотирования содержит средства 1 автоматического определения начала и конца участков полета, выполненные с возможностью выявления участков с установившимся и неустановившимся режимами пилотирования, и выявления участков входа и выхода на соответствующий участок. Средство 2 сравнения текущих значений параметров полета с заданными связано со средством 3 выявления отклонений от заданных значений параметров. Имеются средства 4 вычисления количественных оценок за участки пилотирования, элементы и полет в целом. Со средством 1 автоматического определения начала и конца участков полета связаны средство 5 интерпретации заданий полета в виде упорядоченного множества элементов полета, каждый из которых представляет собой участок полета и соответствующие ему параметры, отражающие состояние модели системы "летчик - воздушное судно - среда", средство 6 выделения на участках полета совокупности параметров, значения которых заданы в полетном задании. Система снабжена средством 7 задания признаков эталонной ошибки, связанным со средством сравнения текущих значений параметров полета с заданными. Средства вычисления 4 количественных оценок за участки пилотирования связаны со средствами 8 выявления характерных ошибок пилотирования.
Система подготовки данных для анализа результатов пилотирования является составной частью учебно-тренировочного комплекса (УТК) подготовки летного состава. Входящий в состав УТК учебно-тренировочный самолет (УТС) оборудован системой объективного контроля (СОК-Б), которая обеспечивает автоматизацию подготовки данных о результатах обучения пилотированию и включает в себя средства автоматического определения начала и конца участков полета, выполненные на базе блока 9 сбора и преобразования информации (БСПИ) и включающего в себя защищенный и эксплуатационные бортовые накопители 10 и 11 (ЗБН и ЭБН соответственно) бортового устройства 12 регистрации (БУР). К упомянутым блоку 5 и устройству 8 могут быть подключены системы и датчики 13 самолета, бортовой комплекс оборудования 14, бортовые электроприборы 15, относящиеся к кабине 16 инструктора, в которой установлены соответствующие - многофункциональный индикатор (МФЦИ)17, многофункциональный пульт управления (МФПУ) 18, электронный ПНП (ЭПНП) 19, пульт 20 управления и электронное БУ (ЭБУ) 21, связанное с установленными в кабине курсанта 22 аналогичными многофункциональным индикатором (МФЦИ) 23, многофункциональным пультом управления (МФПУ) 24, электронным ПНП (ЭПНП) 25, а также телевизионными камерами 26-30, связанными с указанными устройствами и с широкоугольным коллиматорным авиационным индикатором (ШКАИ) 31. К кабине курсанта относятся блок электронных приборов (БЭП) 32. Значения заданных параметров полета, основанные на модели системы "летчик - воздушное судно - среда", и признаки эталонных ошибок записаны в память бортовой цифровой вычислительной системы (БЦВС) 33, связанной с АЦПУ 34, на который осуществляется вывод данных, и включающей в себя бортовые цифровые вычислительные машины (БЦВМ) 35 и 36 и внешнее запоминающее устройство 37. Общая методика построения таких средств, как упомянутые средство 2 сравнения, средство 3 выявления отклонений, средство 4 вычисления количественных оценок, средство 5 интерпретации заданий полета в виде множества элементов полета с соответствующими параметрами, средство 6 выделения соответствующей совокупности параметров, средство 8 выявления ошибок, известна. Они могут быть выполнены и на базе вычислительной техники. В данном случае они реализованы на базе бортовой цифровой вычислительной системы (БЦВС) 33. СОК-Б обеспечивает автоматическую обработку результатов полетов и действия летного состава, оценку упражнений, вывод данных на индикацию и АЦПУ, занесение данных в ЭБН (фиг.2).
Применение СОК УТК позволит обеспечить автоматизированное решение учебно-методических задач на этапах подготовки к полетам, проведения полетов и разбора полетов. На этапе подготовки к полетам основной задачей автоматизации является проверка готовности летного состава к выполнению полетного задания, на этапе выполнения полетов - наблюдение деятельности летного состава, на этапе разбора полетов - своевременное представление объективной информации для принятия решений о переходе к выполнению следующего этапа или цикла летной подготовки.
Автоматизация учебно-методических приемов обучения пилотированию обеспечивается следующими средствами УТК (фиг.3):
- СОК класса АОС и СОК тренажеров на этапе подготовки к полетам;
- СОК-Б и комплект наземных средств обработки полетной информации на этапе организации и проведения полетов.
Дополнительной задачей СОК-Б может быть подготовка данных для автоматизированного формирования карточек учета инцидентов.
Формализованная структура полетных заданий содержит несколько уровней, различающихся по признаку делимости, который показывает, на сколько частей, имеющих определенное назначение в полетном задании, можно разделить данный элемент полета.
Каждое полетное задание состоит из этапов, элементов и участков. Первый иерархический уровень обеспечивает формализацию участков полета, второй - элементов полета, третий - этапов полета, четвертый - полетное задание (ПЗ) в целом.
Участки полета в соответствии с режимом пилотирования на них разделяют на следующие типы:
- установившиеся (установившийся режим пилотирования);
- неустановившиеся участки (ввод в установившийся режим - вывод из установившегося режима).
Элементы полета разделяются на характерные участки полета с постоянными режимами пилотирования, на которых деятельность летчика направлена на поддержание значений параметров постоянными или на их изменение по определенному закону.
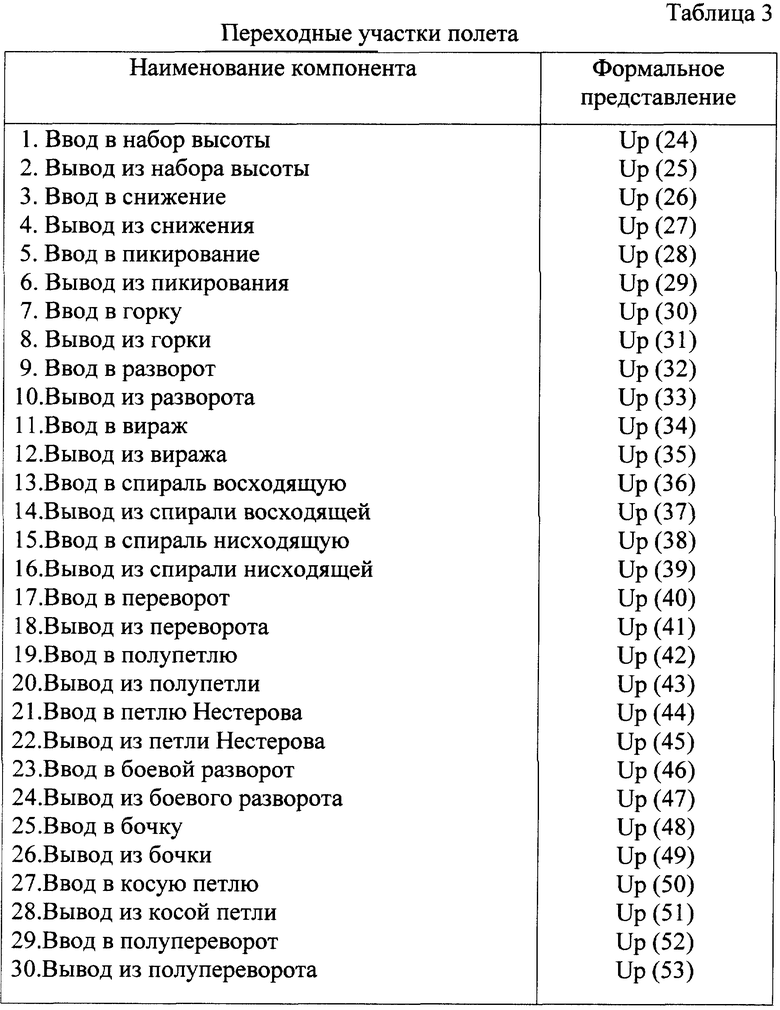
Все установившиеся участки полета соответствуют элементам пилотирования, а неустановившиеся участки характеризуют их участки ввода и вывода. Режимы пилотирования, связанные с вводом или выводом в установившийся или не установившийся режим пилотирования, характеризуют группу переходных участков полета.
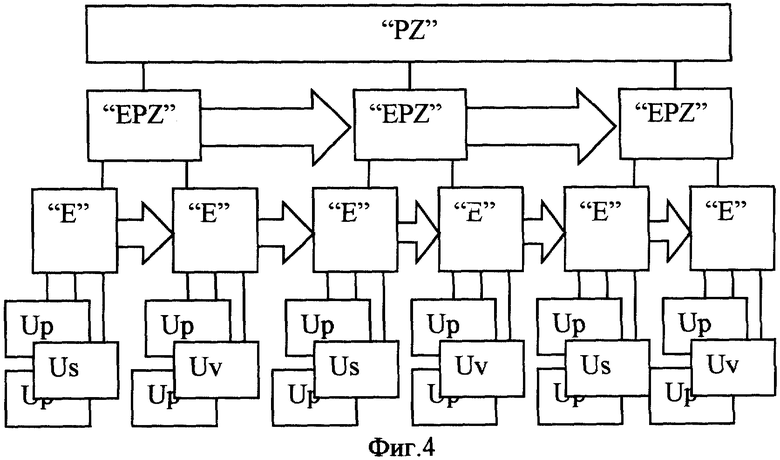
Для придания участкам, элементам и полетным заданиям (упражнениям) формальной структуры каждому из них в соответствии с их уровнем иерархии присваивается кодовое унифицированное наименование. Для уровня участков отличительный индекс - символ "U", элементов - символ "Е", для этапов полета - символ "EPZ", полетного задания - символ "PZ".
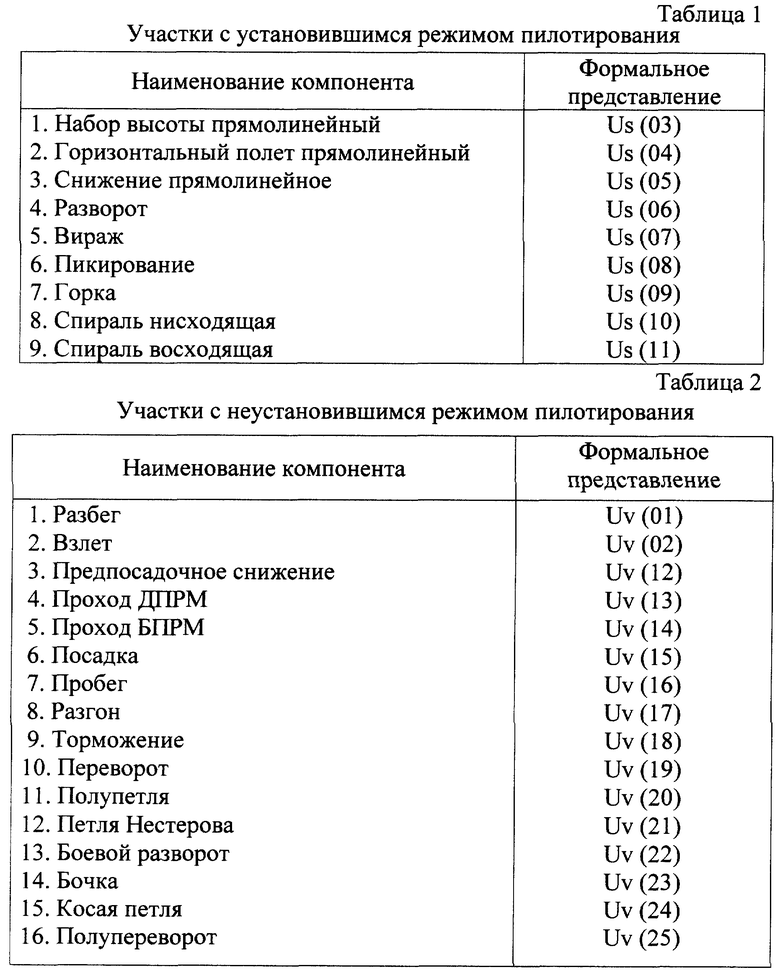
На первом уровне выделяются три группы характерных участков.
Участки с установившимся режимом пилотирования - "Us", с неустановившимся - "Uv", переходные участки полета - "Up".
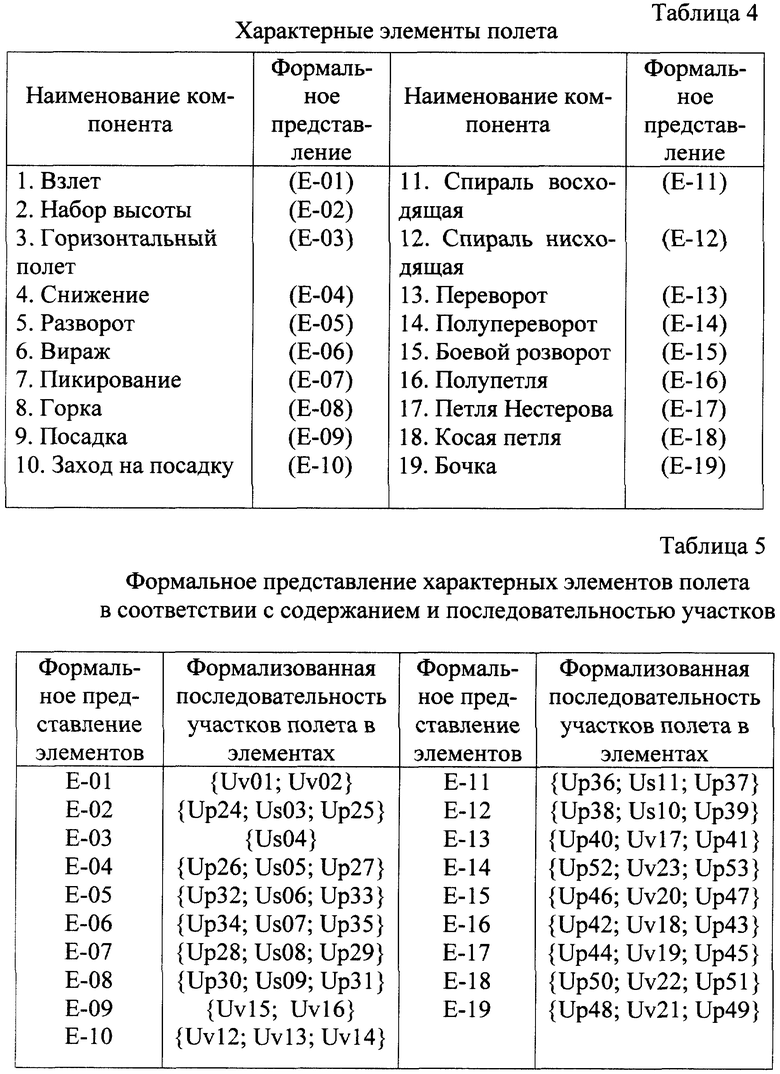
На втором уровне иерархической структуры формализованного описания полетных заданий располагаются элементы полета - (Е) (фиг.4).
Отображение в знаковой форме характерных элементов полета в соответствии с содержанием и последовательностью входящих в них участков полета представлено в формализованном виде (табл. 1-5).
Для автоматического определения участков полета разработана система данных о состоянии параметров на участках. Система данных включает перечень участков полета NU(1; n), в котором каждому участку прилагается перечень параметров полета NPpz (1; n), состояние значений которых характеризуют некоторое эталонное отображение этого участка
NU(n)=<U(n); U(n+1);...U-(n-m)>,
NPpz(n)=<{Ppz}U(1);...{Ppz}U(n)>. (1)
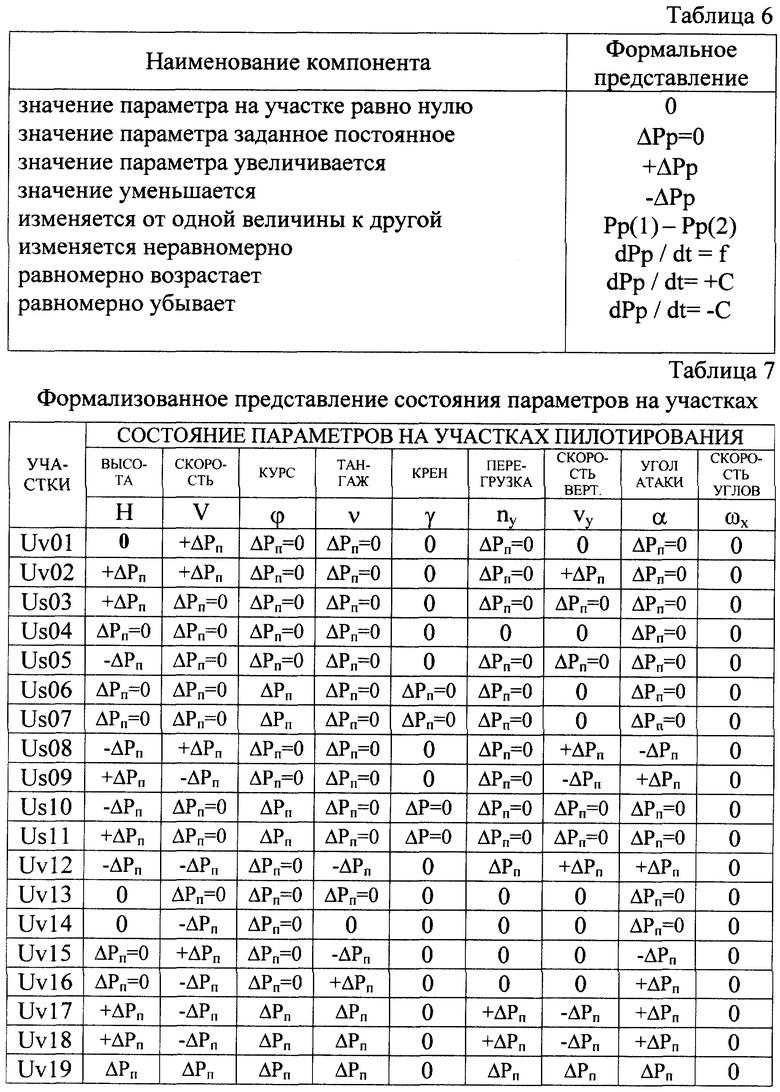
Значения параметров могут быть нулевыми Ppz=0, определенными постоянными ΔPp = 0, изменяться по определенному закону или попеременно иметь различные значения, кроме того значения параметров могут переводиться от одной заданной (начальной) величины к другой заданной (конечной) величине (табл. 6).
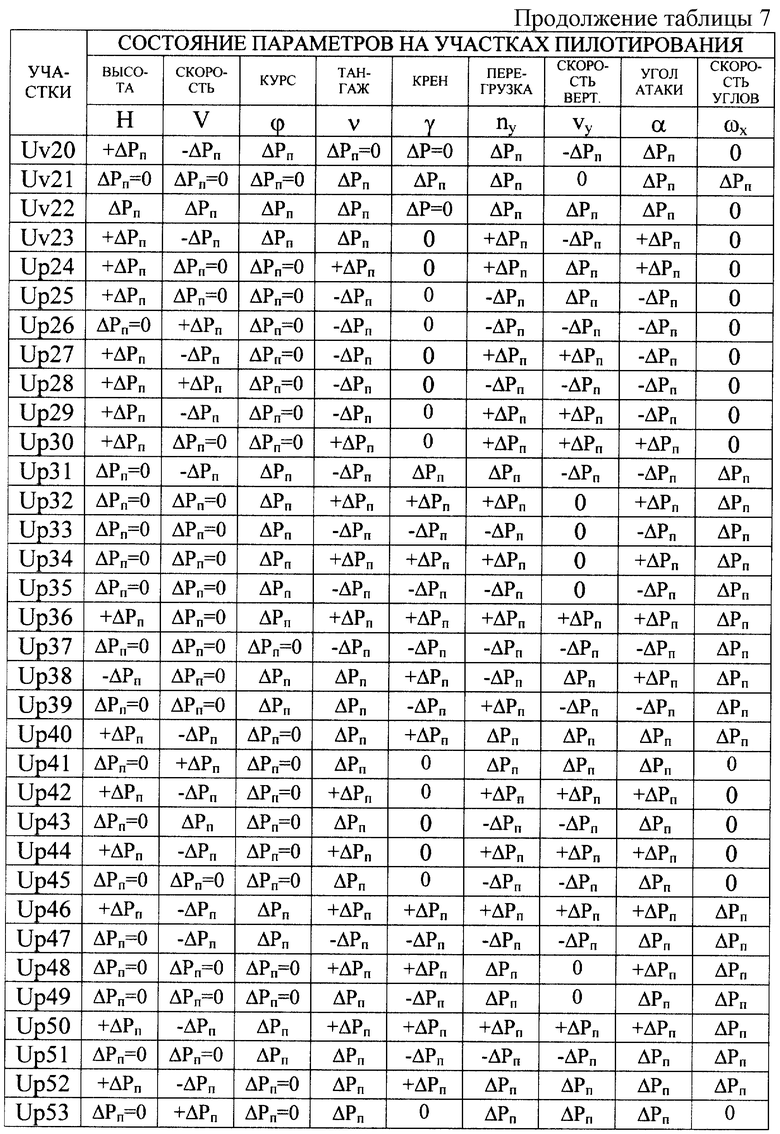
Исходные данные для автоматического определения участков полета служат исходными данными для определения отклонений текущих значений параметров от заданных. В таблицу заносятся абсолютные значения параметров полета и законы их изменения в виде функции значений параметра по времени. Для автоматизированного анализа разрабатывается система законов изменения характерных параметров полета на участках (табл.7).
В законах изменения параметров отражаются следующие варианты изменения состояния параметров:
- на начальном интервале времени значение параметра постоянное, затем его значение возрастает или убывает (переменное);
- значение параметра равномерно возрастает или убывает;
- возрастает (убывает) и возвращается к начальной величине;
- на начальном интервале времени постоянное, затем переменное и на конечном принимает новое постоянное значение.
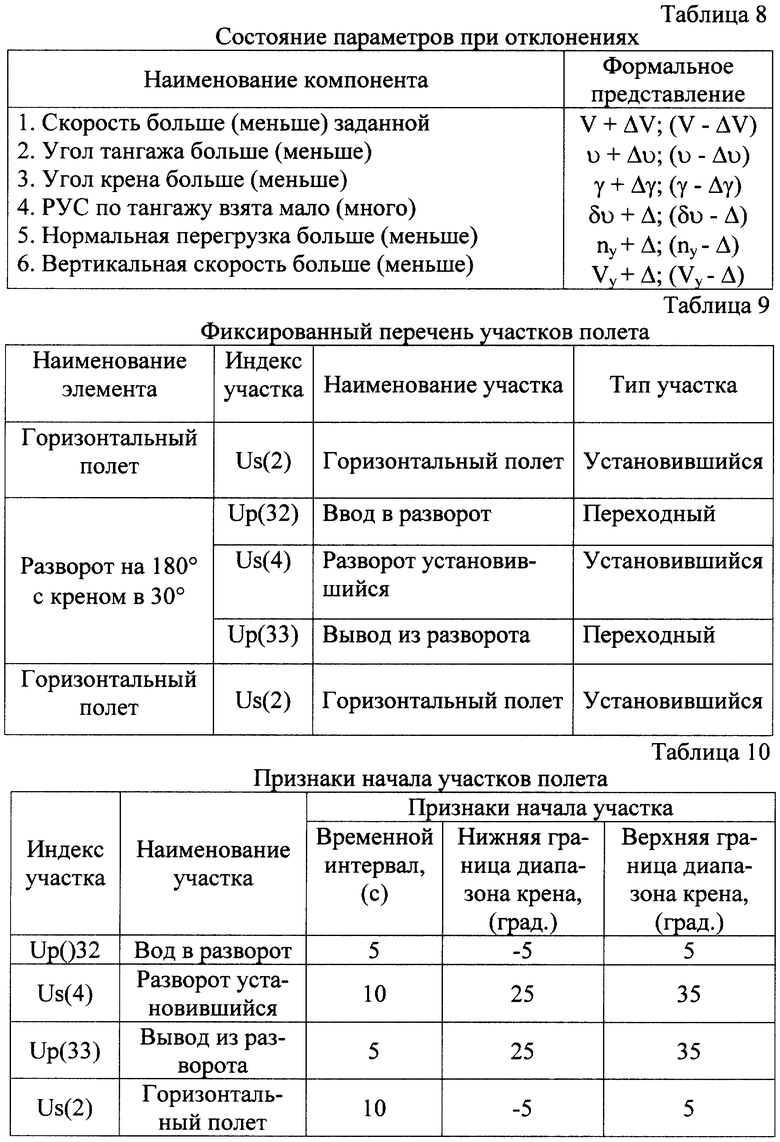
Для автоматической обработки параметров полета принимается система кодов состояния параметров полета на участках. В качестве наиболее наглядного метода формализации состояния параметров целесообразно применять первую производную значения параметра по времени dPp/dt и систему специальных символов для формализованной характеристики состояния параметров на участках (табл. 8).
Для автоматизированного анализа ошибок применяется соответствующее формальное представление характерных ошибок летчиков. Формальная структура ошибок отражает их качественную сторону, то есть факт наличия ошибки при наблюдении объекта контроля.
Формализация выбранных компонентов пилотирования обеспечивает автоматизированное решение учебно-методических приемов, которые не направлены непосредственно на обучаемого, а реализуются инструктором после получения и осмысления информации рекомендательного характера. Этим предложенный метод отличается от других, которые направлены на полную подмену инструктора при реализации основных учебно-методических приемов обучения пилотированию.
Такая постановка задачи в полной мере обосновывает невысокую информационную сложность применяемой модели пилотирования. Однако с помощью данного подхода появляется возможность представить в формализованном виде не только запланированные учебные полетные задания, но и обеспечить наиболее полное формальное описание моделей ошибок, допускаемых при пилотировании.
Поэтому в качестве модели деятельности летчика по пилотированию воздушного судна можно рассматривать траекторию его движения в пространстве, состоящую из участков, элементов и этапов полета с соответствующими состояниями параметров на каждом участке. Для построения модели пилотирования целесообразно использовать метод формализации, который позволяет в знаковой форме представить все компоненты пилотирования с состоянием параметров полета на каждом участке пилотирования.
Выбранный метод построения модели пилотирования обеспечивает представление учебно-методических приемов обучения пилотированию в форме алгоритмов деятельности инструктора, что обеспечит их автоматизированное решение.
Каждое полетное задание в формальном виде представляет собой упорядоченное множество элементов полета, упорядоченность которых соответствует их последовательности выполнения в предстоящем полетном задании
PZ={E(1); E(2); ...Е-(n).}. (2)
Для автоматического определения моментов начала и конца участков пилотирования по элементам полета порядок следования участков установившихся режимов полета в элементах также фиксируется в соответствии с их последовательностью в полетном задании
PZ={Us(1); Us(2); ...+Us(n).}. (3)
Каждому участку установившегося режима пилотирования должны соответствовать участки переходного режима в последовательности их выполнения в полетном задании
Фиксированный перечень участков характеризует переход из предыдущего установившегося режима полета в последующий для каждого элемента полета, входящего в полетные задания (PZ).
Таким образом, формализуют все полетные задания курса летной подготовки летного состава (KLP)
KLP={PZ(1); PZ(2); ...PZ(n).}. (5)
Для определения начала и конца участков пилотирования необходимо наличие фиксированных признаков, характеризующих начало (PRst) выполнения каждого участка и окончание (PRfin).
В качестве признака принимается совокупность состояния значений параметров (SSp) в момент начала или конца данного участка пилотирования
PRst={SSp(1); SSp(2); ...SSp(n)},
Prfin={SSp(1); SSp(2); ...SSp(n)}. (6)
Автоматическое определение начала и конца участков осуществляется в следующей последовательности. Во время выполнения полета с определенной дискретностью регистрируются значения параметров полета, которые в формализованном виде обозначаются символом "Рр", обуславливающие режимы пилотирования на всех участках
По признакам начала выполнения участков (PRst) формируется сигнал о начале выполнения участка
PRst--> {Pp(1)=A; Pp(2)=B; ...Pp(n)=W.} --> U(1)--> U(2)=Ust. (8)
При наличии сигнала о начале выполнении участка вычисляется момент начала очередного участка установившегося режима
Ts(Ust)=t(PRst) - t(0). (9)
По значениям Ts(Ust), характеризующего момент начала очередного участка, формируются сигналы об окончании предыдущего установившегося режима Ufin(n-l) и о начале последующего переходного режима Ust(n+l). По этим данным вычисляются моменты Тf(Ufin)окончания предыдущего Uv(n-l) и начала Ts(Ust) последующего Uv(n+l) участков переходных режимов, формируют сигнал об окончании Ufin и вычисляют момент окончания участка предыдущего установившегося режима TfUs(n-l)
Tf=Tst. (10)
Признаки начала выполнения участка PRst определяются величиной интервала времени t(m)-t(n) с заданными на нем диапазонами значений параметров Рр(1)-->Рр(n), определяющих режим полета, так, что момент начала следующего участка Tst совпадает с моментом окончания предыдущего Tf.
Сигнал о начале участка установившегося режима Us формируется при совпадении текущих значений параметров Рр(n), обуславливающих режим его выполнения, с фиксированными признаками его начала PRst.
Сигнал о начале Tst участка переходного режима Uv формируется при совпадении зарегистрированных значений параметров Pp(nm), обуславливающих режим участка, с фиксированными признаками его начала PRst.
Момент начала Tst определяется вычислением значения полетного времени T(t0+tn), соответствующего началу интервала его фиксированных признаков. Сигнал конца участка UfinU(n) формируется после формирования сигнала о начале следующего за ним участка UstU(n+1). Момент окончания участка TfU(n) фиксируется присвоением ему значения полетного времени T(t0+tn) начала следующего участка TstU(n+1)
TfU(n)=Tst(n=1). (11)
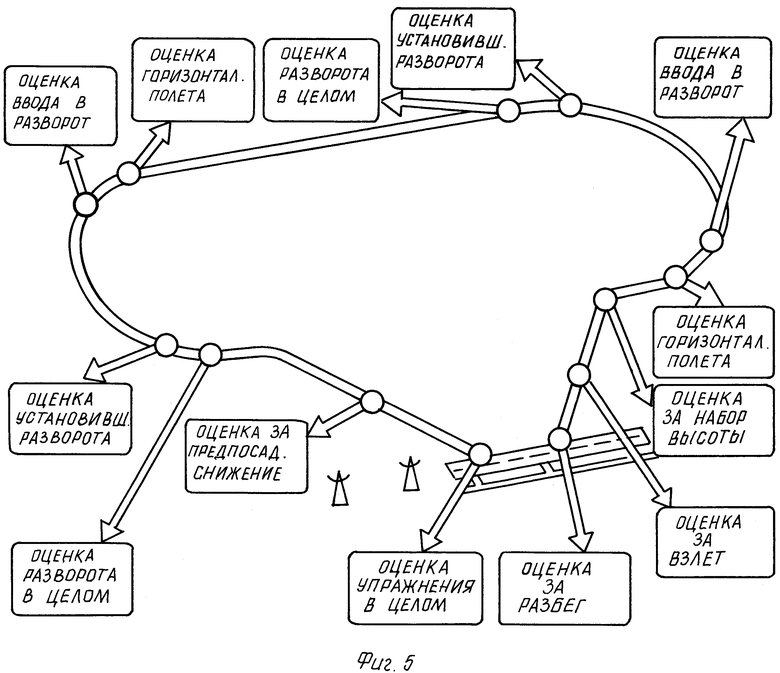
Практическую реализацию метода автоматизированного определения начала и конца выполнения участков полета целесообразно рассмотреть на конкретном примере определения некоторых фрагментов участков пилотирования при выполнении одного из классических полетных заданий полета по кругу двумя на 180o.
Данное полетное задание содержит ярко выраженный фиксированный перечень участков полета. В данном полетном задании осуществляется определение конца выполнения участка Us(2), начало и конец участков Up(32), Us(4), Us(33), конец выполнения участка Us(2) (табл. 9).
Определяющим режим полета параметром Рр на перечисленных участках является угол крена - γ. На основании данного параметра целесообразно предложить следующие признаки начала перечисленных участков полета (табл. 10).
Для наглядности целесообразно рассмотреть следующий пример. Траектория полета по кругу двумя на 180o представляет собой четкую последовательность элементов полета и участков пилотирования (фиг.5).
Для автоматизации учебно-методических приемов при обучении пилотированию в полете по кругу, например количественного оценивания качества удерживания значений параметров на участках пилотирования, необходимо четко определить начало и конец каждого участка.
По совокупности признаков участков последовательно определяются в автоматическом режиме начало и конец участков, разбег, взлет, набор высоты, выход из набора высоты, горизонтальный полет, ввод в разворот, установившийся разворот, вывод из разворота, горизонтальный полет, ввод в разворот, установившийся разворот, вывод из разворота, горизонтальный полет, ввод в предпосадочное снижение, предпосадочное снижение, выравнивание, посадка.
Общей задачей наблюдения в ходе обучения пилотированию является установление состояния наблюдаемого объекта, в качестве которого рассматривается деятельность летного состава при пилотировании воздушного судна. Для установления состояния объекта, характеризующего процесс пилотирования, в автоматическом режиме требуется математическая формулировка задачи наблюдения. Математическая формулировка задачи наблюдения предполагает наличие математической модели наблюдаемого объекта, которая характеризуется свойствами объекта, содержанием наблюдения и условиями его осуществления. В наиболее общем виде модель объекта наблюдения может быть представлена упорядоченным множеством
K=<T, X, Y, Z, F, L>, (12)
где Т - множество моментов времени, в которые наблюдается объект;
X, Y - множество входных и выходных сигналов соответственно;
Z - множество состояний объекта;
F - оператор переходов, отражающий процесс изменения состояния объекта от внутренних и внешних воздействий;
L - оператор выходов, отражающий формирование выходного сигнала реакции объекта на воздействия.
Процесс пилотирования в полной мере отражает модель системы "летчик - воздушное судно - среда", которая характеризуется следующими основными компонентами.
Под множеством входных и выходных сигналов объекта наблюдения принимается совокупность значений параметров, характеризующих состояние воздушного судна в полете и воздействия летчика на его органы управления и системы - совокупность параметров полета {Pp(ks)}.
X,Y={Pp(ks i); Pp(ks j); ...Pp(ks n)}. (13)
Под множеством состояний объекта наблюдения принимается состояние совокупности регистрируемых параметров на участках пилотирования, которые характеризуют правильные или ошибочные действия летчика, а также его работоспособное или неработоспособное состояние {Pp(rs)}.
Z={Pp(rs i); Pp(rs j); ...Pp(rs n)}. (14)
Под переходами понимается состояние реализации учебно-методических приемов обучения пилотированию, которое характеризуется качеством пилотирования - различием между нормативно заданным состоянием совокупности параметров на участках полета {Pp(z)} и измеренным в ходе полета {Pp(tek)}, а также наличием ошибок пилотирования, характеризуемых состоянием совокупности отклонений значений параметров от нормативно заданных
F={Pp(zi); Pp(tekj); Op(n);}, (15)
{Op=Pp(tek)-Pp(z)>Op(z)}.
Под выходами понимается формирование признака успешного выполнения текущего задания и готовности обучаемого к выполнению последующего полетного задания (PZ) по упражнениям курса летной подготовки
L={PZ(i)-->PZ(i+1)}. (16)
Моменты времени Т характеризуют минимальную частоту регистрации параметров Тr(Рр) для эффективного автоматизированного наблюдения.
Математическая формулировка автоматизированного наблюдения летного обучения будет представлять собой следующее упорядоченное множество:
AK= { Tr(Pp); Pp(ks i); Pp(rs); Pp(tek) - Pp(z); Op; PZ(i)-->PZ(i+1)}. (17)
Метод автоматического определения отклонений параметров полета от заданных значений.
К одному из основных понятий теории пилотирования относится отклонение воздушного судна, под которым принимается различие между фактическими значениями выдерживаемых на данном режиме пилотирования параметрами Pp(tek) и нормативно заданными значениями параметров Pp(z)
ΔPp = Pp(tek)-Pp(z). (18)
Отклонения, вызванные ошибками летчика, усложняют пилотирование, для их устранения необходимо определить повлекшие их ошибки.
К одному из основных учебно-методических приемов обучения пилотированию относится оперативное определение и регистрация ошибок пилотирования в ходе выполнения полетов для их анализа в межполетном разборе. Для этой цели применяют автоматизированное определение и анализ ошибок пилотирования воздушного судна. Рассмотрим алгоритм определения ошибок пилотирования.
Обоснование алгоритма автоматизированного определения ошибок пилотирования обеспечивается следующим допущением. Порядок, содержание и последовательность летной подготовки определяет курс летной подготовки.
Курс требует точного выполнения полетного задания (PZ) в соответствии с последовательностью в нем элементов полета (Е), а также выдерживания установленных режимов пилотирования в соответствии с заданными значениями параметров полета (Рр) и соблюдения правил выполнения полета.
Автоматизация анализа ошибок летчика обеспечивается
- выделением на участках полета U(i) совокупности параметров Pp(zj), значения которых заданы в полетном задании и выдерживаются летчиком при пилотировании;
- автоматическим определением участков полета U(i)(n) в реальном времени выполнения полета;
автоматическим сравнением фактических текущих значений параметров Pp(tek) с заданными Pp(z).
При необходимости определения количественной составляющей ошибки целесообразно провести количественное сравнение отклонений параметров, характеризующих данную ошибку -(+-(-)ΔPp:
(+)(-)ΔPp = Pp(tek)-Pp(z). (19)
Автоматизированный анализ ошибок пилотирования воздушного судна заключается в автоматическом определении тех отклонений значений параметров (+)(-)ΔPp, которые возникли из-за ошибочных действий летчика.
В процессе выполнения полетного задания осуществляется автоматическое сравнение состояния текущих значений параметров полета с формальными представлениями состояний параметров, характеризующих соответствующие ошибки летчика.
В случае совпадения основных признаков состояния текущих значений параметров (+)(-)ΔPp(tek) с признаками "эталонной ошибки" (+)(-)ΔPp(z) автоматически регистрируются все атрибуты состояния текущих значений параметров полета Pp(tek). При этом им присваивается индекс, соответствующий определенной характерной ошибке
(+)(-)ΔPp(tek.i) = (+)(-)ΔPp(osh.j). (21)
В качестве исходных данных при автоматизированном анализе используется перечень отклонений параметров на участках полета, которые характеризуют определенные ошибки пилотирования (табл. 11).
Регистрация ошибок осуществляется с регистрацией соответствующих меток времени и участков полета, что обеспечивает подготовку данных для межполетного разбора. Все зарегистрированные в ходе выполнения полета ошибки сохраняются в соответствующей базе данных <(+)(-)ΔPp(osh)> и при необходимости могут предъявляться на средствах отображения информации в реальном времени совершения данной ошибки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ С МУЛЬТИПЛЕКСНОЙ СИСТЕМОЙ ИНФОРМАЦИОННОГО ОБМЕНА | 2001 |
|
RU2174485C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| АВИАЦИОННАЯ ИНТЕГРАЛЬНАЯ СИСТЕМА ОБЪЕКТИВНОГО КОНТРОЛЯ | 2004 |
|
RU2247431C1 |
| КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2215668C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ЭЛЕКТРОННОЙ ИНДИКАЦИИ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2219108C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОРУЖИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2249543C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |

Изобретение относится к авиационной технике. Средства автоматического определения начала и конца участков полета и выявления участков входа и выхода на соответствующий участок выполнены с возможностью выявления участков с установившимся и неустановившимся режимами пилотирования. Они связаны со средством интерпретации заданий полета в виде упорядоченного множества элементов полета, средством выделения на участках полета совокупности параметров, значения которых заданы в полетном задании. Средство сравнения текущих значений параметров полета с заданными связано со средством выявления отклонений от заданных значений параметров и средством задания признаков эталонной ошибки. Каждый из элементов полета представляет собой участок полета и соответствующие ему параметры, отражающие состояние модели "летчик - воздушное судно - среда". Средства вычисления количественных оценок за участки пилотирования связаны со средством выявления характерных ошибок пилотирования. Технический результат - повышение точности оценки действий летного состава в процессе обучения и тренировки. 5 ил., 11 табл.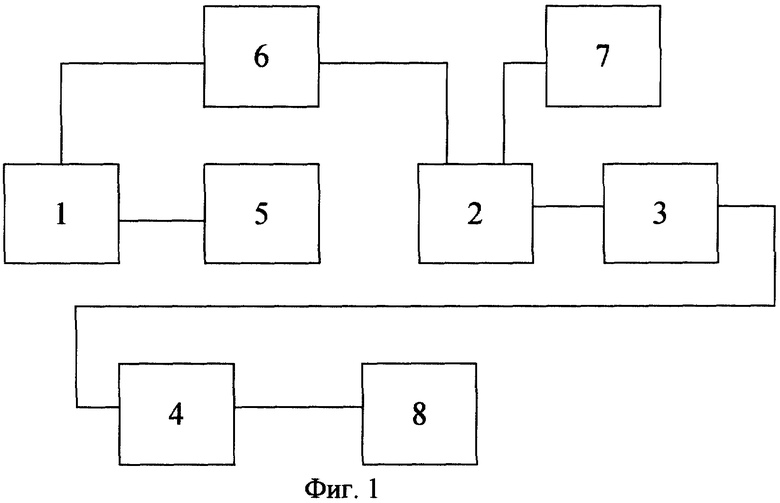
Система подготовки данных для анализа результатов пилотирования, содержащая средства автоматического определения начала и конца участков полета, выполненные с возможностью выявления участков с установившимся и неустановившимся режимами пилотирования, и выявления участков входа и выхода на соответствующий участок, средство сравнения текущих значений параметров полета с заданными, связанное со средством выявления отклонений от заданных значений параметров, и средства вычисления количественных оценок за участки пилотирования, элементы и полет в целом, отличающаяся тем, что она снабжена связанными со средством автоматического определения начала и конца участков полета средством интерпретации заданий полета в виде упорядоченного множества элементов полета, каждый из которых представляет собой участок полета и соответствующие ему параметры, отражающие состояние модели системы "летчик - воздушное судно - среда", средством выделения на участках полета совокупности параметров, значения которых заданы в полетном задании, связанным со средством сравнения текущих параметров полета с заданными средством задания признаков эталонной ошибки, при этом средства вычисления количественных оценок за участки пилотирования связаны со средствами выявления характерных ошибок пилотирования.
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| DE 19703736 A1 06.11.1997 | |||
| US 6163744 A 19.12.2000 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭКОЛОГИЧЕСКОЙ БЕЗОПАСНОСТИ ПРИБОРОВ ДЛЯ СМАЗОЧНО-ЗАПРАВОЧНЫХ ОПЕРАЦИЙ | 2020 |
|
RU2731069C1 |
| Наручные часы | 1977 |
|
SU652526A1 |

