Изобретение относится к контрольным устройствам и может быть использовано для контроля и регистрации показателей качества техники пилотирования.
В настоящее время известно бортовое устройство регистрации параметров полета типа "Тестер УЗЛ", позволяющее регистрировать параметры полета и записывать их значения на магнитный накопитель для последующего анализа [1].
Недостатками этого устройства являются ограниченные возможности низкая точность обработки из-за возможного появления сбоев при перезаписи полетной информации с одного магнитного накопителя на другие, недостаточная оперативность анализа качества выполнения полетного задания.
Задачей данного изобретения является расширение функциональных возможностей прототипа путем добавления новых конструктивных элементов, позволяющих оценить качество пилотирования по совокупности функционально связанных показателей, что позволяет более точно, достоверно и объективно оценить выполненный элемент, участок полета и полет в целом.
Для решения этой задачи в устройство для контроля качества выполнения полетного задания, содержащие датчики, установленные на самолете, информационные выходы которых соединены с соответствующими входами блока цифрового измерения входных параметров, блок вычисления параметров пилотирования, блок индикации и блок управления введены блок управления прерыванием работы, блок задания признаков оценки, группа входов блока индикации соединена с группой выходов блока задания признаков оценки и которые также являются выходами устройства, выход блока вычисления результатов пилотирования соединен с информационным входом блока задания признаков оценки, а информационные входы - с выходами блока вычисления параметров пилотирования, информационный вход которого и первый информационный вход блока управления прерыванием работы связаны с первым выходом блока цифрового измерения входных параметров, второй и третий выходы которого подключены ко второму и третьему информационным входам блока управления прерыванием работы, установочный вход которого является входом устройства для задания номера выполняемого упражнения, а группа выходов соединена с группой входов блока управления, управляющие и адресные выходы которого связаны с соответствующими управляющими и адресными входами блока управления прерыванием работы, блока цифрового измерения входных параметров, блока вычисления параметров пилотирования, блока вычисления результатов пилотирования и блока задания признаков оценки и введены блок ввода параметров блок вычисления ограничений, блок вычисления оценок, входы блока ввода параметров соединены соответственно с информационными выходами датчиков, а три информационных выхода - с соответствующими входами блока вычисления трендов и исполнительских моделей, кроме того, третий информационный выход соединен также с первым входом, а четвертый информационный выход - с вторым входом блока вычисления оценок, три других входа которого соединены с выходами блока вычисления трендов и исполнительских моделей, а два оставшихся - с выходами блока ввода ограничений, установочный вход которого предназначен для подачи типа варианта внешних подвесок, а выходы блока вычисления оценок соединены с соответствующими входами блока индикации и являются выходами устройства для записи информации на магнитный накопитель.
Совместная работа всех блоков позволяет определить единый комплексный показатель качества пилотирования, представляющий собой совокупность оценок по точности пилотирования, качества управляющих действий летчика и степени риска выполнения фигуры, элемента или участка полета, что значительно позволит повысить надежность и достоверность оценивания полета в целом (общий технический результат).
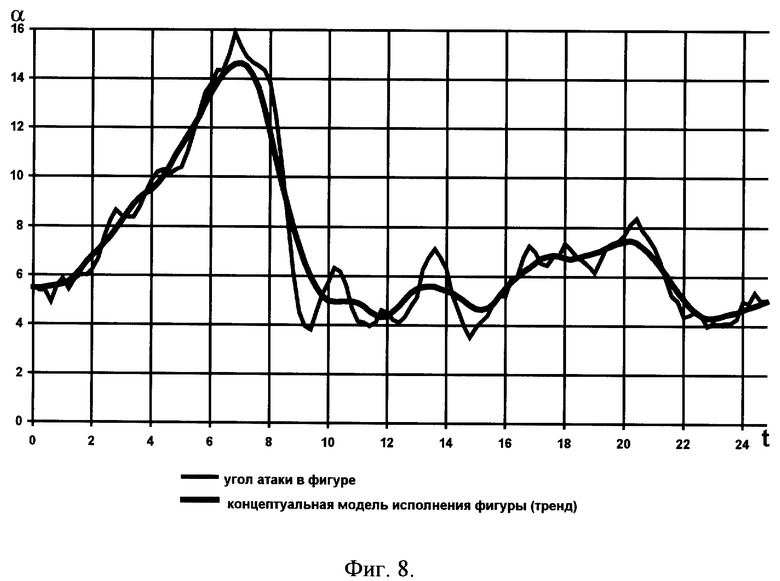
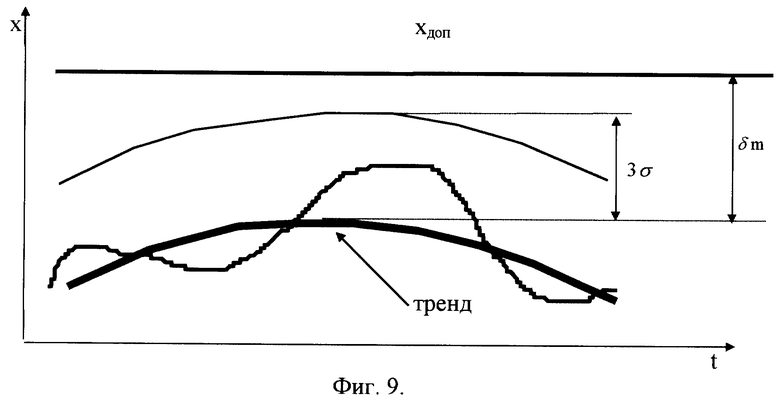
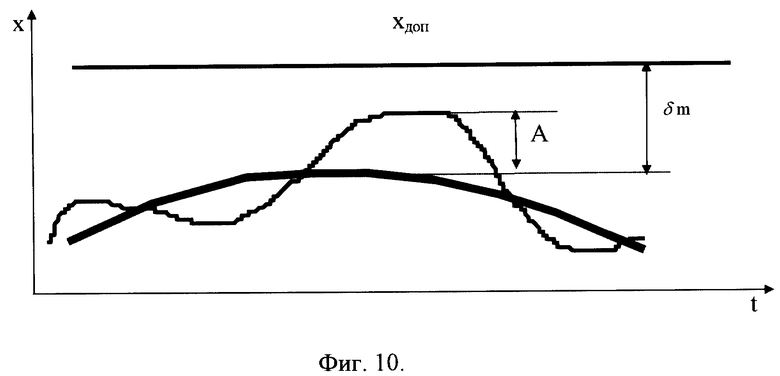
В настоящее время известен целый ряд методик оценки безопасности полета при ошибках летного состава, использующих как "большую" статистику, так и для конкретных полетных ситуаций. Анализ этих методик показал, что они обладают существенными недостатками, связанными в большинстве случаев со сложностью и проблемами технического характера. Поэтому предлагается оценивать степень безопасности пилотажа через степень приближения определяющих параметров к допустимому значению, с учетом индивидуальных особенностей техники пилотирования оцениваемого летчика. При выполнении пилота летчик будет стремится, в меру своей летной квалификации, центрировать определяющие параметры относительно концептуальной модели. Эти колебания определяющих параметров относительно концептуальной модели будем рассматривать как исполнительскую модель. С точки зрения оценки безопасности все фигуры пилотажа можно разбить на два класса: фигуры типа 1, при выполнении которых не требуется приближение параметра концептуальной модели к допустимому значению (см. фиг. 9); фигуры типа 2, при выполнении которых требуется максимальное приближение параметра концептуальной модели к допустимому значению (см. фиг. 10).
Выделение концептуальной модели (тренда) выполненного маневра возможно различными методами. Сравнительный анализ методов выделения тренда по реальным полетным данным показал, что наиболее эффективен метод скользящего среднего (см. фиг. 8)
где xt - текущее дискретное измерение определяющего параметра x.
Текущее значение исполнительской модели летчика определяется выражением
Если период опроса параметра x равен T, то время (период) сглаживания фильтра равно
Δt = T(2n+1).
Обработка реальных полетных данных показала, что наиболее оптимальным для выделения концептуальной модели является фильтр со временем сглаживания Δt равным 2.2 - 2.7 Такое значение периода сглаживания физически объясняется динамикой пилотирования.
Признаком участка полета с интенсивным маневрированием является истинное значение логической функции
Cl = (|γ|>10o)+(|ϑ|>10o)+(ny>1,5)+(ny<0,5).
Для фигур типа 1 приближение определяющих параметров к допустимому значению не вызвано необходимостью выполнения полетного задания. Поэтому такое приближение, как правило, свидетельствует о неправильном выборе концептуальной модели. Для неформального анализа безопасности пилотажа достаточна нормированная вероятностная оценка
где  среднеквадратическое отклонение;
среднеквадратическое отклонение;
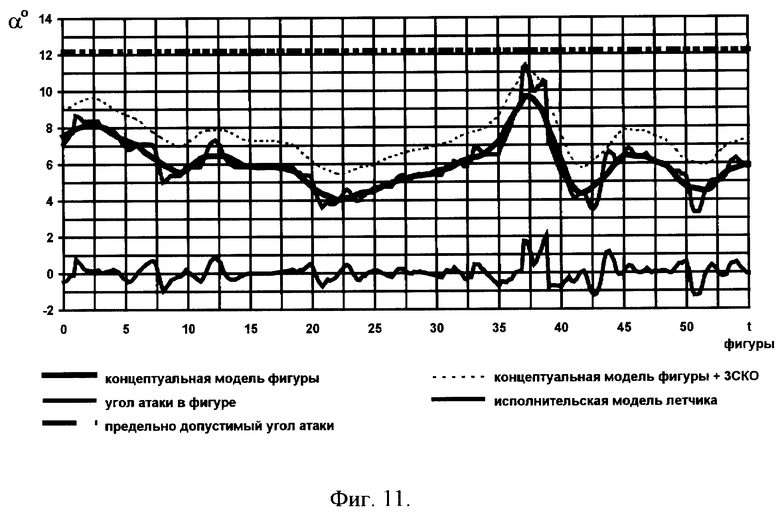
δm - минимальное расстояние между трендом и предельно допустимым значением определяющего параметра (см. фиг. 9, 11).
В полете является допустимым изменение оценки l в диапазоне от 0 до 1, так как относительно невелика вероятность выхода отдельных отклонений исполнительской модели за 3σ. Величина оценки l указывает степень приближения случайных отклонений исполнительской модели к предельно допустимому значению (при l≥1 - опасно).
К фигурам типа 2 отнесены маневры, в которых наблюдается отклонение параметров, максимально приближенных к предельно допустимым значениям. Оценка вероятности выхода максимального отклонения исполнительской модели за предельно допустимые значения близка к неудовлетворительной (l≥1). Поэтому для фигур типа 2 целесообразно контролировать нормированный запас между ограничением и максимальным отклонением исполнительской модели (см. фиг. 10, 11)
Допустимое изменение значений данной оценки от 0 до 1. Фигура выполнена опасно, если m≥1. Наиболее значимыми параметрами являются угол атаки и нормальная перегрузка. На борту ЛА целесообразно установить указатели параметров оценки безопасности l, m и δm по каналам α и ny.
В настоящее время качество управления самолетом оценивается по субъективным наблюдениям инструктора и не исключает возможности необъективной оценки действий летчика.
Суть предлагаемого метода оценки качества управления заключается в том, что оценивается разброс управляющих воздействий на органы ручного управления (исполнительской модели) относительно вычисляемого полезного сигнала (тренда). Выделение текущих значений и исполнительской модели осуществляется согласно описанной выше методики. Оценки разброса исполнительской модели определяются через дисперсию (мощность отклонения)
где k - число измерений параметра x в реализации данного маневра.
Оценка качества управления осуществляется по трем каналам: ручка летчика по крену, ручка летчика по тангажу и педали.
Для анализа качества точности пилотирования выбраны параметры, значения которых при достаточном числе реализаций подчинены нормальному закону распределения, плотность вероятности которого определяется выражением
где 
X = |x1,x2,...,xn|T - вектор текущих значений параметров; вектор математических ожиданий.
вектор математических ожиданий.
В качестве критерия оценивания использовано выражение
G(t)=XT tK-1Xt,
где 
 среднеквадратические отклонения параметров;
среднеквадратические отклонения параметров;
t - величина относительного отклонения.
Задавая ряд значений t по 4-х бальной системе оценивания рассчитываются оценки точности пилотирования:
5 - при XT 0K-1X0≤G(t5);
4 - при G(t5)<XT 0K-1X0≤G(t4);
3 - при G(t4)<XT 0K-1X0≤G(t3);
2 - при G(t3)<XT 0K-1X0
Выбор параметров, входящих в критерий, и характерных точек, в которых они замеряются, осуществляется для каждого маневра или фигуры пилотажа. Величины относительных отклонений задаются исходя из требований руководящих (нормирующих) документов.
Выбор точек на траектории выполнения маневра или фигуры пилотажа осуществляется с учетом наличия отличительных признаков. Номер упражнения для каждого конкретного полета задается.
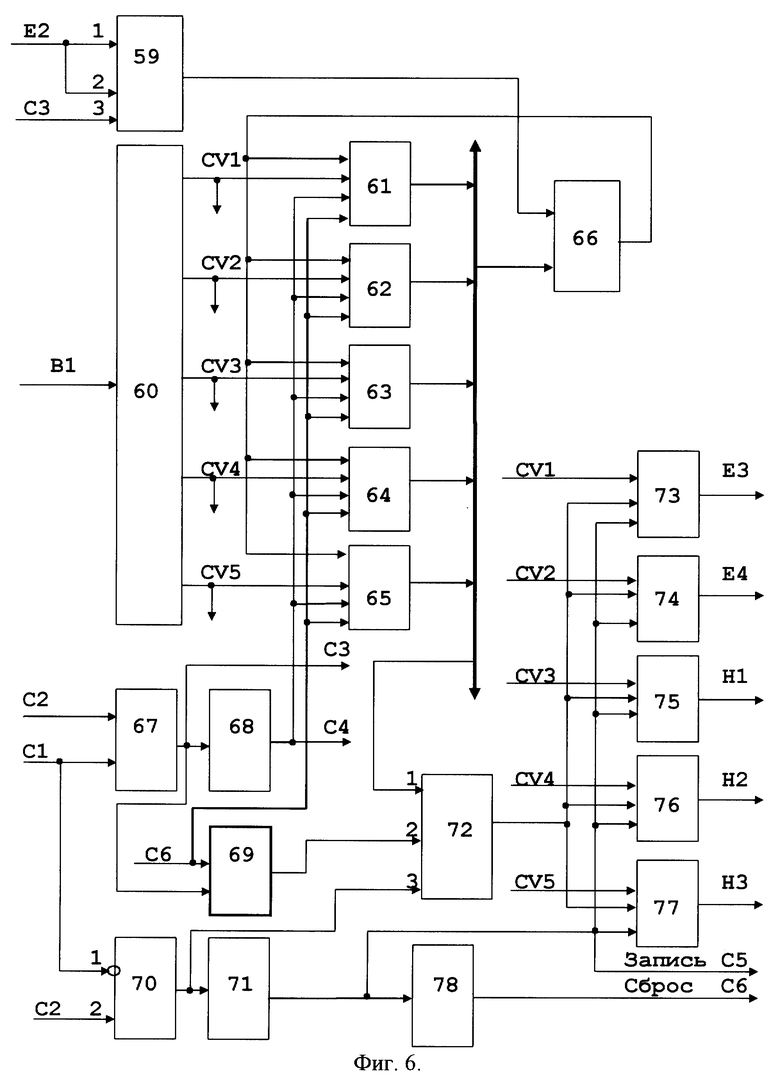
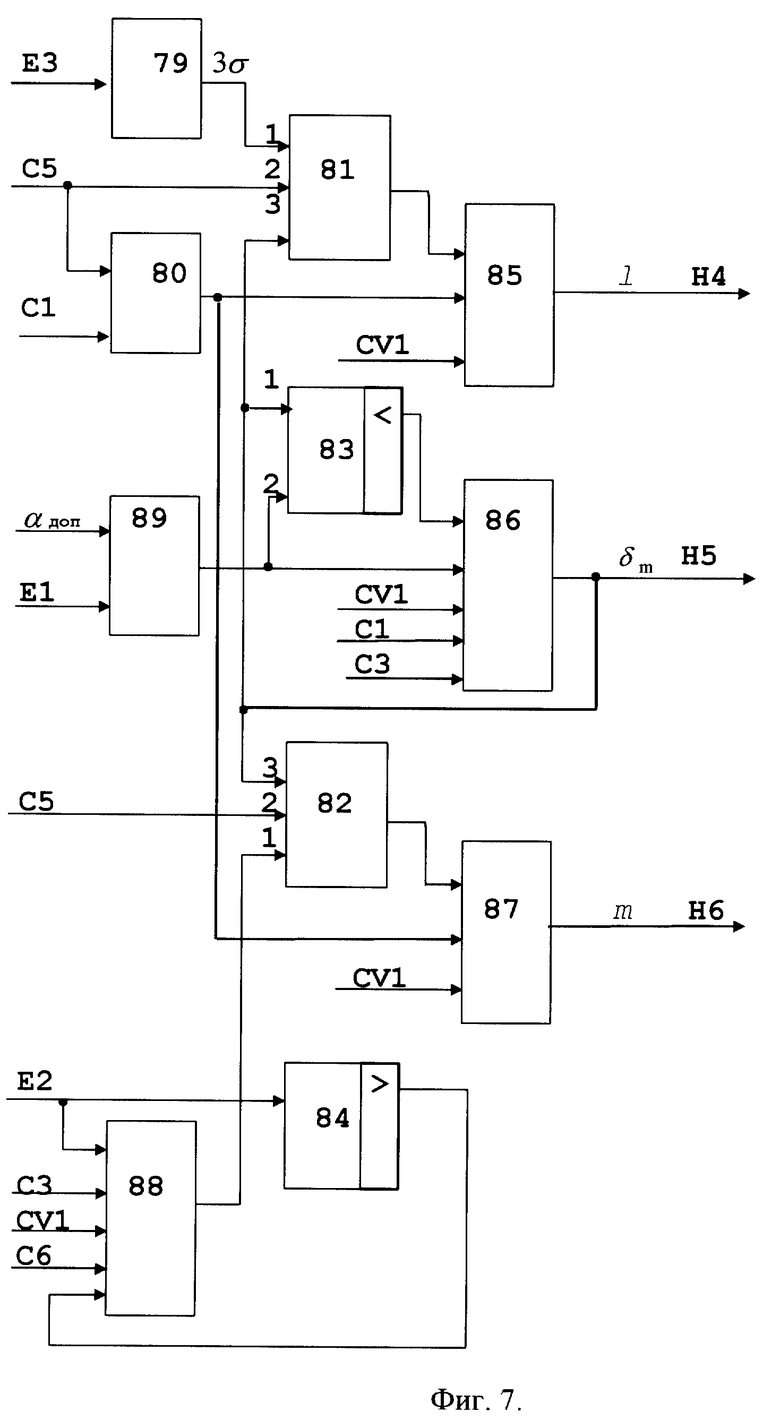
Устройство в целом показано на фиг. 1, на фиг. 2 представлена функциональная схема блока параметров, на фиг. 3 - функциональная схема блока вычисления трендов и исполнительских моделей, на фиг. 4 - раскрыта функциональная схема блока рабочих регистров, входящего в состав блока вычисления трендов и исполнительских моделей, на фиг. 5 - функциональная схема блока ограничений, на фиг. 6, 7 - функциональные схемы блока вычисления оценки качества управляющих действий летчика и блока вычисления оценки безопасности пилотажа по каналу угла атаки, входящих в состав блока вычисления оценки, на фиг. 8 представлен пример выделения концептуальной модели, на фиг. 9, 10 примеры фигур типа 1 и 2, на фиг. 11 пример, поясняющий работу предлагаемого алгоритма.
Устройство для оценки качества техники пилотирования состоит из датчиков 1, которые непосредственно установлены на борту самолета, блока 2 цифрового измерения входных параметров, блока 3 управления прерыванием работы, блока 4 управления, блока 5 вычисления параметров пилотирования, блока 6 вычисления результатов пилотирования, блока 7 задания признаков оценки, блока 8 индикации, блока 11 ввода параметров, блока 12 вычисления трендов и исполнительских моделей, блока 13 ввода ограничений и блока 14 вычисления оценок. Блок управления 4 включает в себя узел 9 управления арифметическими и логическими вычислениями и узел 10 постоянной памяти.
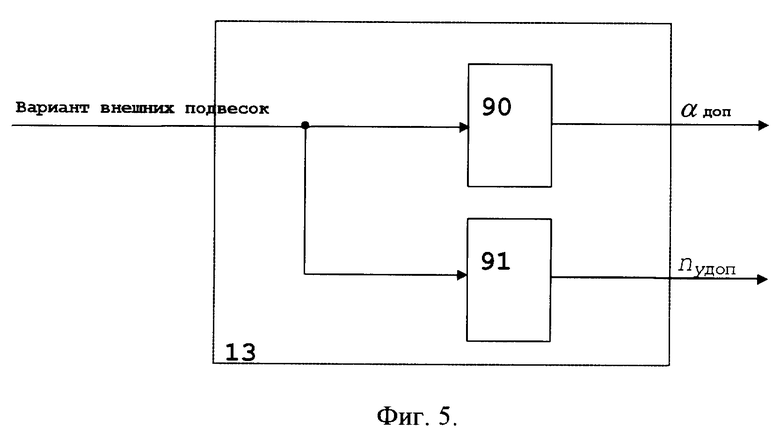
Блок датчиков 1 представляет собой группу серийных датчиков параметров полета, установленных на самолете и входящих в систему "Тестер УЗ Л". Блок 2 цифрового измерения представляет собой аналого-цифровой преобразователь со схемами выборки аналоговых входных сигналов. Блок 3 управления прерыванием предназначен для идентификации проходных самолетом контрольных точек маневра или фигуры. Блок 4 управления предназначен для управления процессом вычисления оценок точности пилотирования. Блок 5 вычисления параметров пилотирования предназначен для определения и накопления параметров и их значений, измеренных в контрольных точках для дальнейшей обработки. Блок 6 вычисления результатов пилотирования предназначен для расчета отклонений значений параметров от эталонных в контрольных точках (определяет текущее значение критерия Z=G(t)). Блок 7 задания признаков оценки предназначен для формирования оценок точности пилотирования. Блок 8 индикации предназначен для визуализации результатов. Блок 11 ввода параметров предназначен для преобразования аналоговых сигналов в цифровые и формирования сигнала "участок маневрирования" Cl. Блок 12 вычисления трендов и исполнительских моделей предназначен для вычисления текущих значений трендов и исполнительских моделей. Блок 13 ввода ограничений предназначен для выдачи текущих допустимых значений угла атаки и нормальной перегрузки в зависимости от варианта внешней подвески. Блоки 11, 12 и 13 работают с момента взлета самолета до посадки. Блок 14 вычисления оценок предназначен для расчета оценок безопасности пилотажа и качества управляющих действий. Управляется стробом Cl.
Предлагаемое устройство для оценки качества пилотирования самолета летчиком работает следующим образом.
Оценка качества пилотирования состоит из следующих компонент (оценок): точность пилотирования; безопасность пилотажа; качество управляющих действий летчика.
Оценку точности пилотирования вычисляют блоки 2 - 7.
Блок 2 цифрового измерения входных параметров вычисляет текущий адрес обрабатываемого параметра B, его кодовое значение A и сопровождает эти коды синхросигналом C.
Сигналы A, B и C поступают на вход блоков 3 управления прерыванием работы, который обрабатывает их и вырабатывает признак прохождения самолетом текущей характерной точки фигуры пилотажа. По выявлению признака прохождения самолетом текущей характерной точки фигуры пилотажа блок 3 выдает сигналы "Запуск", "N фигуры" и "точки" в блок 4 управления.
После получения блоком 4 сигналов "Запуск, "N фигуры" и "точки", в блоках 5 - 7 (под управлением блока 4) начинается вычисление оценки точности прохождения текущей характерной точки фигуры пилотажа.
Коды параметров A и коды управления CO1, CO2, CO6, CO7 поступают на входы блока 5 вычисления параметров пилотирования. Блок 5 осуществляет накопление и хранение матриц X и Y - параметров, измеренных в характерных точках фигуры пилотажа.
На входы блока 6 вычисления результатов пилотирования поступают матрицы X, Y и сигналы управления CO3, CO9, CO10. Блок 6 выполняет матричную операцию
Z = Y•K-1•X,
где K - корреляционная матрица.
Выходной сигнал Z и сигналы управления CO4, CO8 поступают на вход блока 7 задания признаков оценки. Блок 7 сравнивает результат, полученный в блоке 6, с эталонными значениями (полями допуска) и дает оценку точности выполненного маневра или фигуры пилотажа.
Результат вычисления оценки точности пилотирования индицируется блоком 8.
Оценки безопасности пилотажа и качества управляющих действий летчика вычисляются совместно блоками 11 - 14.
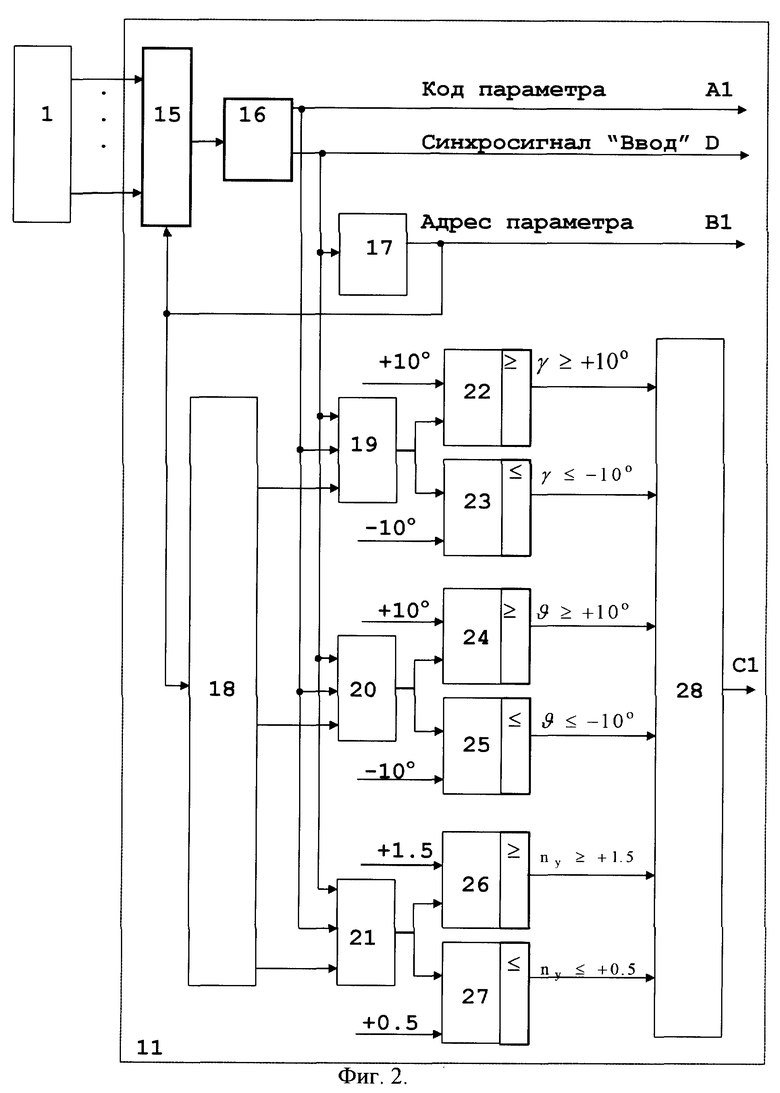
Блок 11 ввода параметров последовательно перебирает адреса параметров A1, участвующих в вычислении оценок безопасности пилотажа и качества управляющих действий летчика, преобразует аналоговое значение текущего параметра в код B1 и выдает синхросигналы D и Cl. Синхросигнал D сопровождает передачу в последующие блоки кода параметра B1 и его адреса A1. Синхросигнал C1 имеет значение "истинно" на участках полета с интенсивным маневрированием. Блок 11 работает циклически с момента взлета до момента посадки.
Блок 11 (см. фиг. 2) состоит из коммутатора аналоговых сигналов 15, аналого-цифрового преобразователя 16, счетчика текущих адресов параметров 17 и схемы формирования сигнала Cl. В свою очередь, схема формирования сигнала C1 состоит из дешифратора адреса параметров 18, регистров параметров 19, 20 и 21, соответственно для γ, ν и ny. блоков сравнения (компараторов) 22 - 27 и логической схемы "ИЛИ" 28.
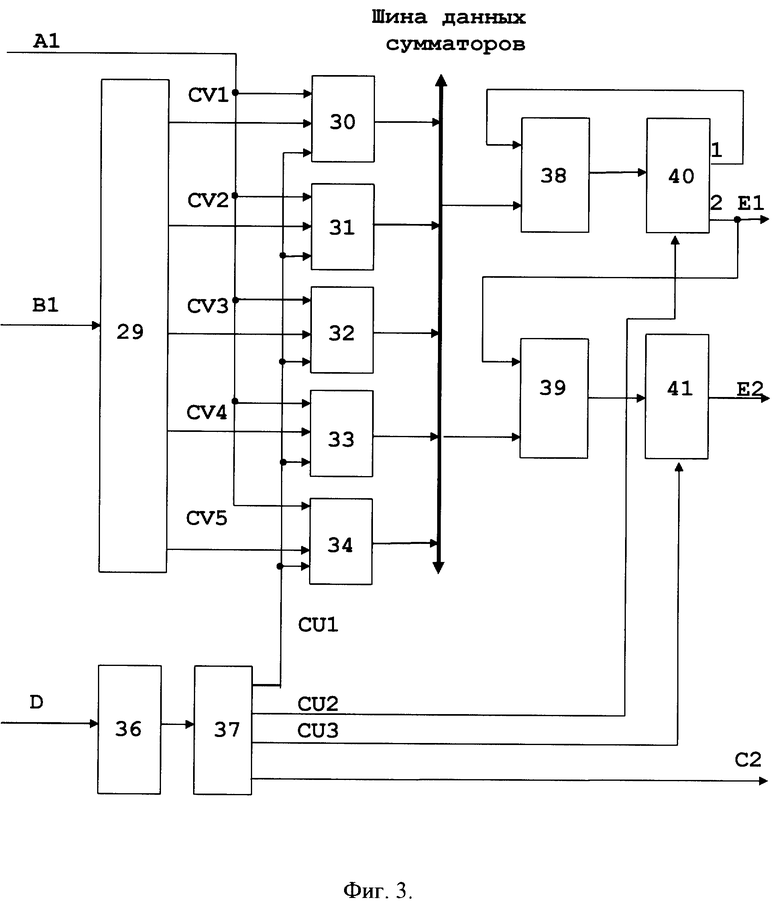
Блок 12 (см. фиг. 3) предназначен для вычисления тенда E1 и исполнительской модели E2, для параметра с адресом A1 и кодовым значением B1. Запуск вычисления осуществляется по переднему фронту синхросигнала D.
Блок 12 включает в себя счетное устройство 36, ПЗУ команд 37, дешифратор адреса параметров 29, блоки рабочих регистров 30 - 34 для 5 параметров, используемых для вычисления оценок безопасности пилотажа и качества управляющих действий летчика, сумматора 38, вычитающего сумматора 39, регистра накопления 40 и регистра исполнительской модели 41.
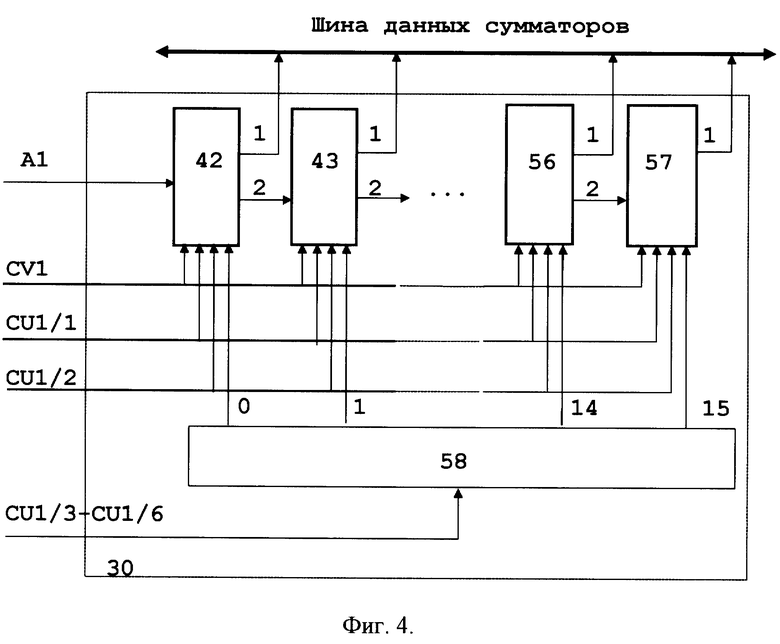
Все блоки рабочих регистров идентичны по конструкции. На фиг. 4 в качестве примера раскрыта функциональная схема 30 блока. Он состоит из 16 регистров 42 - 57 и дешифратора адреса 58. Высоко импедансные выходы регистров 42 - 57 заведены на ширину данных сумматоров. Двоичные выходы 2 регистров 42 - 56 заведены на входы соответствующих последующих регистров 43 - 57. На вход регистра 42 поступает код текущего параметра A1.
Выборка блока рабочих регистров 30 - 34 осуществляется по сигналу с дешифратора 29 CV1 - CV5, соответственно.
Выбранный блок рабочих регистров работает по 6-ти разрядному коду управления CU1, поступающему с ПЗУ команд 37. Разряд CU1/1 кода управления осуществляет запись A1 в регистр 42 и запись сдвига предыдущих измерений в регистрах 43 - 57. Таким образом блок регистров хранит последние 16 измерений соответствующего параметра. По "единичному" значению разряда CU1/2 кода управления и 4-х разрядному адресу регистра CU1/3 - CU1/6, выбирается соответствующий регистр и на шину данных сумматоров поступает хранящий в регистре код параметра.
Блок 12 работает по программе, записанной в ПЗУ команд 36. Адреса выполняемых команд поступают их счетного устройства 36. Блок 36 запускается синхросигналом D, выдает последовательно адреса команд с 1 по 18 и останавливается с адресом 19 до прихода следующего синхроимпульса D. Программа работы 12 блока содержит следующие команды:
Адрес 1. Запись измерения A1 и сдвиг предыдущих измерений в выбранном блоке рабочих регистров (силы CU1/1 и CU2/1 равны "1").
Адреса 2 - 17. Последовательный вывод на шину данных сумматоров 38 и накопление результатов сложения всех 16 рабочих регистров. Выбор регистров по CU1/2 - CU1/6. Накопление результата осуществляется в регистре 40. Первый выход регистра 40 заведен на сумматор 38. Запись в регистр 40 осуществляется по заднему фронту CU2/2, равному "1".
Адрес 18. Со второго выхода регистра 40 код E1 (тренд текущего параметра) поступает на вычитающий вход сумматора 39 (операция деления на 16 заменена сдвигом на 4 разряда в регистре 40). На второй вход сумматора 39 по команде CU1/2 - CU1/6 поступает код из 9 (по счету) регистра, выбранного блока рабочих регистров, т.е. xt. Полученный результат записывается в регистр 41 по заднему фронту сигнала CU3.
Адрес 19. Конец цикла вычисления тренда и исполнительской модели текущего параметра. Из ПЗУ команд выдается синхросигнал C2.
Адрес 14 предназначен для вычисления оценки безопасности пилотажа оценки качества управляющих действий летчика.
Блок 14 состоит из блока вычисления оценки качества управляющих действий летчика и двух блоков вычисления оценки безопасности пилотажа по каналам угла атаки и перегрузки соответственно.
Блок вычисления оценки качества управляющих действий летчика предназначен для вычисления дисперсий 5-ти исполнительских моделей. Коды дисперсий H1, H2 и H3 - оценки качества управляющих действий летчика по каналам ручка летчика по крену, ручка летчика по тангажу и педали - поступают в блок 8 на индикацию. Коды дисперсий E3 и E4 (для исполнительских моделей α и ny соответственно) поступают на входы блоков вычисления оценки безопасности пилотажа по каналам угла атаки и перегрузки.
Блок вычисления оценки качества управляющих действий летчика (см. фиг. 6) состоит из схемы умножения (возведения в квадрат) 59; 5-ти регистров накопления 61 - 65; сумматора 66; дешифратора выборки регистров 60; 5-ти регистров хранения результатов 73 - 77; схемы деления 72; счетчика 69; 2-х схем логического "И" 67 и 70; 3-х схем задержки сигнала 68, 71 и 78.
При наличии адреса текущего параметра B1 дешифратор 60 выдает соответствующий строб выборки регистра накопления CV1 - CV5. По стробу выборки регистра накопления соответствующий регистра накопления подключается по шине данных на вход сумматора 66 и схемы деления 72 (делимое).
Запуск блока осуществляется синхросигналом C2, поступающим из блока 12 на входы схем логического "И" 67 и 70. Если выполняется маневр (C1="1"), то выход блока 67 устанавливается в "единицу" (C3="1"). При наличии C2 и отсутствии маневра (C="0") выход блока равен "1" (соответственно, C3="0").
При C1="1" и C3="1" схема умножения 59 возводит E2 в квадрат. Результат поступает на второй вход сумматора 66. По окончанию процесса возведения в квадрат и суммирования, схема задержки сигнала 68 выдает строб записи результата в соответствующий регистр накопления. Кроме того, строб C3 поступает на счетный вход счетчика 69 (подсчет числа измерений).
При C1= "0" и C2=1 схема логического "И" 70 выдает строб запуска схемы деления 72. При этом на 1-м входе схеме 72 находится выбранный через шину данных регистр накопитель (делимое), а на 2-м выходе находится число измерений со счетчика 69 (делитель). После получения результата вычислений, схема задержки 71 выдает строб записи в выбранный регистр хранения результатов и блокируется от повторной записи в этот регистр до конца следующей фигуры. По окончанию вычислений схема задержки 78 выдает сигнал "Сброс" на выбранный регистр накопитель и далее в блоки вычисления оценки безопасности пилотажа.
Блок вычисления оценки безопасности пилотажа предназначен для вычисления оценок l, δm и m, соответственно H4, H5 и H6 по каналу угла атаки и H7, H8 и H9 по каналу перегрузки.
Блоки вычисления оценки безопасности пилотажа по каналам α и ny идентичны. На фиг. 7. показан канал оценки по α. Данный блок состоит из функциональной матрицы (ПЗУ) 79; 2-х схем деления 81 и 82; регистра накопления "δm" 86; регистра накопления "A" 88; 2-х регистров результата 85 и 87; вычитающего сумматора 89; 2-х схем сравнения 83 и 84; схемы задержки 80.
Выборка регистров блока вычисления оценки безопасности пилотажа по каналу α осуществляется стробом CV1.
По переднему фронту строба C1 все разряды регистра 86 устанавливаются в "1" (δm = max). По приходу последующих стробов C3 значение δm, хранящееся в регистре 86, сравнивается схемой 83 с текущим значением δ, вычисляемым сумматором 89. Если δ < δm, то результат записывается в регистр хранения  Аналогично, в регистре 88 выбирается максимальное значение A (строб C6 сбрасывает регистр 88 в "0").
Аналогично, в регистре 88 выбирается максимальное значение A (строб C6 сбрасывает регистр 88 в "0").
По приходу строба C5 из матрицы 79 выбирается значение 3σ, соответствующие коду входного сигнала, и запускаются схемы деления 81 и 82. По окончанию вычислений схема задержки 80 формирует строб записи в регистры 85 и 87. После выдачи строба записи, схема задержки 80 блокируется от повторной записи в регистры 85 и 87 (до прихода переднего фронта сигнала C1).
Литература
1. Тестер-УЗ серия Л. Техническое описание 8И.582.009 ТО, 1975 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ РАДИОЛОКАЦИОННОЙ СТАНЦИИ БОКОВОГО ОБЗОРА | 1998 |
|
RU2124738C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2132079C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2130635C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ПОМЕХ | 1998 |
|
RU2132592C1 |
| Устройство для вычисления логических функций | 1986 |
|
SU1367011A1 |
| ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОСТИ В ГИДРОДИНАМИЧЕСКОЙ ТРУБЕ ТЕРМОСОПРОТИВЛЕНИЯМИ | 1998 |
|
RU2133022C1 |
| ИСТОЧНИК ЭЛЕКТРОПИТАНИЯ | 1998 |
|
RU2132107C1 |
| ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОСТИ В ГИДРОДИНАМИЧЕСКОЙ ТРУБЕ | 1998 |
|
RU2130176C1 |
| Устройство для автоматизированной поверки измерительных приборов | 1982 |
|
SU1051478A2 |
| Устройство для вычисления полиномов | 1984 |
|
SU1233140A1 |
Устройство относится к контрольным устройствам и может быть использовано для контроля и регистрации показателей качества техники пилотирования. Техническим результатом изобретения является расширение функциональных возможностей путем добавления новых конструктивных элементов, позволяющих оценить качество пилотирования по совокупности функционально связанных показателей, что позволит более надежно, достоверно и объективно оценить выполненный элемент, участок полета и полет в целом. Технический результат достигается тем, что устройство содержит датчики, установленные на борту самолета, данные от которых обрабатываются устройством, состоящим из последовательно соединенных блоков цифрового измерения входных параметров, вычисления параметров пилотирования, вычисления результатов пилотирования, задания признаков оценки и индикации, работа которых осуществляется непосредственно от блоков управления и управления прерыванием работы. Дополнительно введены блоки ввода параметров, выделения трендов и исполнительских моделей, ввода ограничений и вычисления оценок, что позволит оценить технику пилотирования по основным показателям: оценке точности пилотирования, оценке качества управления и оценке степени риска выполненного элемента или участка полета. 11 ил.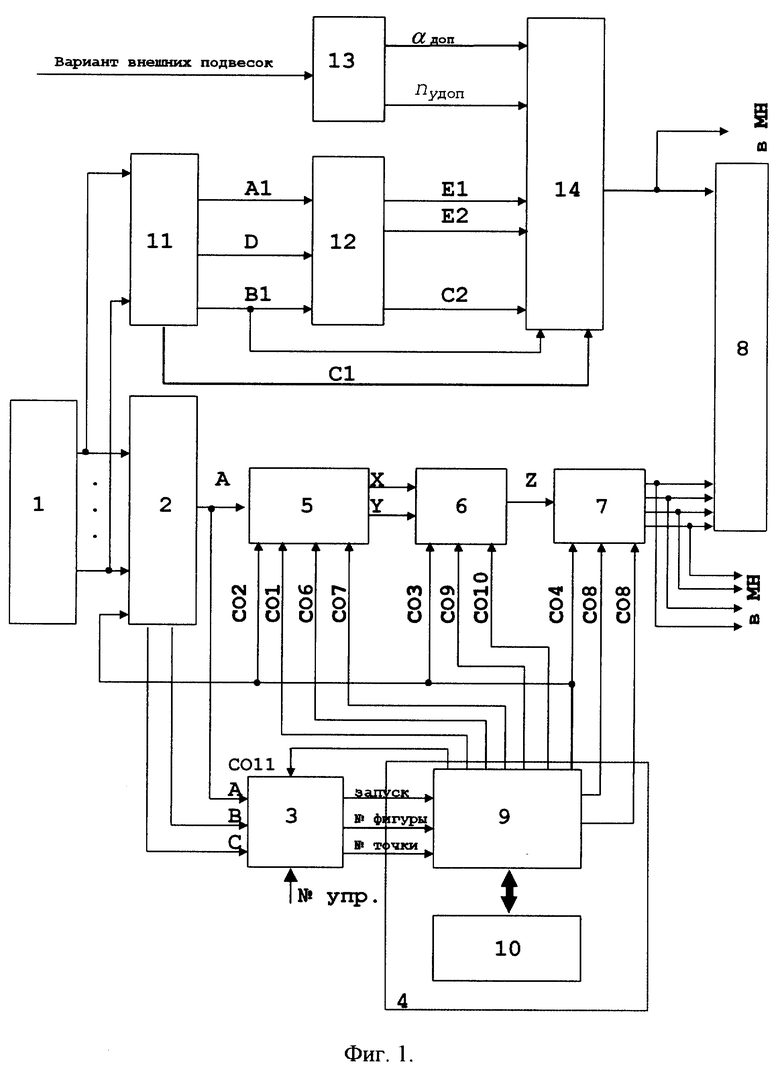
Устройство для контроля качества выполнения полетного задания, содержащее датчики, установленные на самолете, информационные выходы которых соединены с соответствующими входами блока цифрового измерения входных параметров, блок вычисления параметров пилотирования, блок индикации и блок управления, отличающееся тем, что в устройство введены блок управления прерыванием работы, блок задания признаков оценки, группа входов блока индикации соединена с группой выходов блока задания признаков оценки и которые также являются выходами устройства, выход блока вычисления результатов пилотирования соединен с информационным входом блока задания признаков оценки, а информационные входы - с выходами блока вычисления параметров пилотирования, информационный вход которого и первый информационный вход блока управления прерыванием работы связаны с первым выходом блока цифрового измерения входных параметров, второй и третий выходы которого подключены ко второму и третьему информационным входам блока управления прерыванием работы, установочный вход которого является входом устройства для задания номера выполняемого упражнения, а группа выходов соединена с группой входов блока управления, управляющие и адресные выходы которого связаны с соответствующими управляющими и адресными входами блока управления прерыванием работы, блока цифрового измерения входных параметров, блока вычисления параметров пилотирования, блок вычисления результатов пилотирования и блока задания признаков оценки, и введены блок ввода параметров, блок вычисления трендов и исполнительских моделей, блок ввода ограничений, блок вычисления оценок, входы блока ввода параметров соединены соответственно с информационными входами датчиков, а три информационных выхода - с соответствующими входами блока вычисления трендов и исполнительских моделей, кроме того, третий информационный выход соединен также с первым входом, а четвертый информационный выход со вторым входом блока вычисления оценок, три других входа которого соединены с выходами блока вычисления трендов и исполнительских моделей, а два оставшихся - с выходами блока ввода ограничений, установочный вход которого предназначен для подачи типа варианта внешних подвесок, а выходы блока вычисления оценок соединены с соответствующими входами блока индикации и являются выходами устройства для записи информации на магнитный накопитель.
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| Трестер-УЗ серия Л., Техническое описание | |||
| Автоматический указатель станций | 1914 |
|
SU582A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| US 4236685 А, 02.12.80 | |||
| RU 95106989 А1, 20.02.97. | |||
