Изобретение относится к горному делу и может быть использовано в маркшейдерской технике и других областях народного хозяйства, связанных с проведением высокоточных измерений на местности.
Известно устройство для измерения деформаций массива горных пород, включающее подвижный и неподвижный реперы, измерительную тягу, соединенную с контактной группой, блок питания, радиопередающую аппаратуру.
В этом устройстве информация о деформации массива определяется по замыканию контактов контактной группы и передается с помощью радиопередающей аппаратуры на диспетчерский пункт.
Однако, известное устройство обладает недостатками, заключающими в том, что контактная группа, выполняющая роль первичного датчика преобразователя, обладает сравнительно невысокой точностью и надежностью в работе.
Известно устройство для измерения деформации массива горных пород, содержащее подвижный и неподвижный реперы, соединенные измерительной тягой, один конец которой закреплен на подвижном репере, а второй пропущен через блок на подвижном репере и прикреплен к свободно висящему грузу. Ось блока соединена с датчиком-преобразователем, представляющим из себя, например, позиционный датчик "угол-цифровой код", который выполнен в виде дешифратора блока сканирующих светодиодов, укрепленного на оси прозрачного диска с кодовой маской, фокона с фотодиодом, усилителя, укрепленного на оси диска, причем выход фотодиода через усилитель подключен к радиопередающей аппаратуре, которая связана с аппаратурой диспетчерского пункта.
При установке датчика на массиве горных пород выставляют на датчике "угол-цифровой код" нулевое положение. При этом вращают блок в необходимое положение, ослабив предварительно натяжение измерительной тяги. В ходе измерений в зависимости от величины смещения изменяется расстояние между реперами, что вызывает вращение блока и, в свою очередь, соединенного с его осью, датчика-преобразователя. При подаче на вход дешифратора прямоугольных импульсов, последовательно загораются светоиды блока сканирующих светоидов, в зависимости от положения прозрачного диска и, соответственно, кодовой маски на нем, свет поступает или не поступает через фокон на фотодиод. После этого электрический сигнал с выхода фотодиода усиливается до необходимой величины усилителем и передается радиопередающей аппаратурой на диспетчерский пункт.
Однако, известному устройству присущи недостатки, заключающиеся в том, что для обеспечения возможности измерений с высокой точностью при больших величинах смещения массива горных пород, кодовый диск датчика "угол-цифровой код" должен иметь много дорожек, но это приведет к снижению устойчивости и надежности его работы, в результате чего снизится точность измерения величины смещения.
Целью изобретения является повышение точности и надежности измерений.
Поставленная цель достигается тем, что известное устройство для измерений деформаций массива горных пород, содержащее подвижный и неподвижный реперы, соединенные измерительной тягой, один конец которой закреплен на подвижном репере, а второй пропущен через блок и связан с датчиком, содержащим первичный датчик-преобразователь угловых величин, подключенный ко вторичной аппаратуре, датчик-преобразователь, размещенный в корпусе, снабженный люфтовыбирающим редуктором, на выходном валу которого установлен диск из неферромагнитного материала с закрепленными по его окружности постоянными магнитами, а на корпусе датчика-преобразователя закреплены два геркона с возможностью взаимодействия с магнитными полями постоянных магнитов, при этом вторичная аппаратура содержит блок устранения дребезга герконов, построенный на двух триггерах, блок определения направления перемещения, содержащий каскад предварительного определения направления перемещения, каскад окончательного определения перемещения, построенный на двух триггерах каждый, схему анализа, содержащую пять схем И, генератор тактовых импульсов, реверсивный счетчик перемещения и блок отображения информации, причем первый выход генератора соединен с С-входами триггеров блока устранения дребезга герконов, второй выход соединен со входами первой и второй схем И схемы анализа, оба геркона подключены своими контактами к Д-входам триггеров схемы устранения дребезга контактов герконов, причем прямые выходы триггеров схемы устранения дребезга соединены попарно с Д- и С-входами триггеров предварительного определения направления перемещения с одним из входов 3-й и 4-й схем И схемы анализа, а с другими входами этих схем соединены инверсные выходы триггеров схемы устранения дребезга. С инверсными выходами схемы устранения дребезга соединены входы пятой схемы И, выход которой соединен с первой и второй схемами И, выход первой схемы И подключен к R-входам триггеров, выход второй схемы И к С-входу реверсивного счетчика, а выходы третьей и четвертой схем И соединены с С-входами триггеров схемы окончательного определения направления перемещения, а с Д-входами этих триггеров соединены попарно триггеры схемы предварительного определения направления перемещения, при этом выходы триггеров схемы окончательного определения направления перемещения соединены с реверсивным счетчиком, выход которого связан с устройством отображения информации.
Такое выполнение устройства позволяет повысить точность измерений, так как благодаря наличию люфтовыбирающего редуктора и диска с закрепленными по окружности постоянными магнитами можно обеспечить точность измерений выше одного миллиметра, а наличие реверсивного счетчика в составе вторичной аппаратуры обеспечивает при этом надежное измерение при большой величине смещения - до нескольких метров. Герконовые датчики достаточно надежно фиксируют перемещение коммутацией контактов.
Кроме того, предлагаемый датчик-преобразователь при измерениях практически не потребляет энергии, так как она расходуется на работу вторичной аппаратуры. Это позволяет упростить эксплуатацию устройства, увеличить сроки его службы без замены источника питания.
В ходе проведенного патентного поиска, просмотра технической литературы, технических решений, обладающих признаками сходности с отличительными признаками предлагаемого решения выявлено не было, на основании чего можно сделать вывод о соответствии предлагаемого решения критерию "Существенные отличия".
На фиг. 1 изображена схема расположения устройства; на фиг. 2 - первичного датчика преобразователя; на фиг. 3 и 4 - блок-схемы вторичной аппаратуры.
Предлагаемое устройство для измерения деформаций массива горных пород содержит (фиг. 1) подвижный 1 и неподвижный 2 реперы, соединенные измерительной тягой 3. Один конец измерительной тяги 3 закреплен на подвижном репере 1, а другой пропущен через блок 4 (фиг. 2) на неподвижном репере 2. Блок 4 неподвижного репера 2 подпружинен спиральной пружиной 5 и связан валом 6 с датчиком-преобразователем.
Датчик-преобразователь (фиг. 2), размещенный в корпусе 7, содержит люфтовыбирающий повышающий редуктор, собранный на шестернях 8, 9. На выходном валу 10 редуктора закреплен диск 11 из неферромагнитного магнитного материала, вдоль по окружности которого закреплены постоянные магниты 12. Количество магнитов определяется требуемой точностью измерений. На корпусе 7 датчика-преобразователя закреплены на кронштейне 13 два геркона 14, подключенные ко вторичной аппаратуре 15. Герконы 14 удалены от магнитов 12 так, чтобы обеспечивалось их надежное замыкание при прохождении одного из магнитов 12.
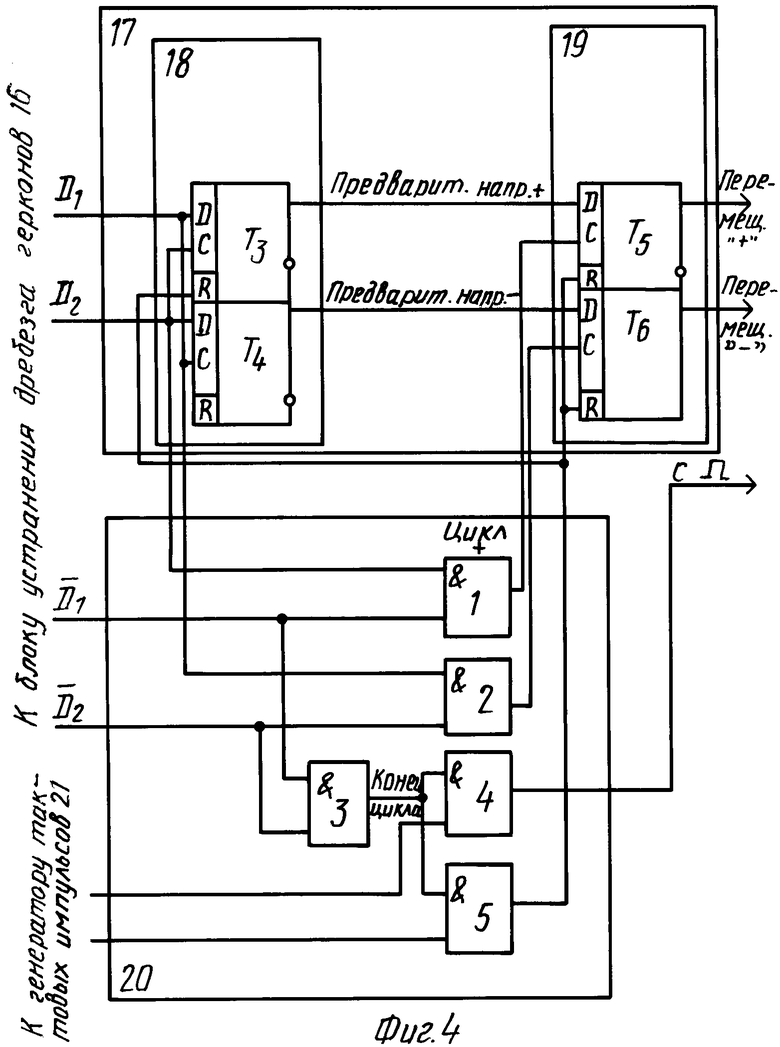
Вторичная аппаратура 15 датчика перемещения содержит (фиг. 3, 4) соединенный с герконами блок устранения дребезга герконов 16, блок определения направления перемещения 17, включающий каскад предварительного определения направления перемещения 18, каскад окончательного определения направления перемещения 19, схему анализа 20, генератор тактовых импульсов 21, реверсивный счетчик перемещения 22 и блок отображения информации 23.
Блок устранения дребезга герконов 16 собран на двух триггерах, (в качестве которых можно использовать микросхему К561 ТМ-2) С-входы триггеров соединены с генератором тактовых импульсов 21, Д-вход с герконами 14, а выходы триггеров с каскадом предварительного определения перемещения 18. Генератор тактовых импульсов 21 (может быть построен с применением микросхем К561ЛА7 и счетчика К561ИЕ3) синхронизирует работу устройства и может вырабатывать импульсы частотой, например, 1 кГц.
Каскад предварительного определения направления перемещения 18 содержит два триггера Т3, Т4, входы Д и С которых соединены с выходами триггеров Т1, Т2 блока устранения дребезга герконов 16. Выходы триггеров Т3, Т4 соединены с Д-входами триггеров Т5, Т6 каскада окончательного определения направления перемещения. R-входы триггеров Т3-Т6, соединены выходом генератора тактовых импульсов 21 через схему анализа 20. Выходы триггеров Т5, Т6 каскада 19 соединены с входом реверсивного счетчика перемещения 22 (микросхема К561ИЕ11).
В качестве триггеров Т3-Т6 могут быть использованы микросхемы К561ТМ-2). Схема анализа 20 содержит пять схем И, причем первая и вторая схема и своими выходами соединены с прямыми инверсными выходами триггеров Т1, Т2, а выходы соответственно С-входами триггеров Т5, Т6 каскада 19.
Входы третьей схемы И соединены с инверсными выходами триггеров Т1, Т2, а ее выходы со входами 4-й и 5-й схем И. Другие входы этих схем И соединены с генератором тактовых импульсов 21. Выход 5-й схемы И соединен с R входами триггеров Т3-Т6, а выход 4-й схемы И с С входом реверсивного счетчика 22. В качестве схем "И" в схеме анализа 20 могут быть использованы микросхемы К561ЛА7. Реверсивный счетчик 29 подключен к устройству отображения информации 23, в качестве которого могут быть использованы, например, светодиодные семисегментные индикаторы.
В случае необходимости передача информации о величине смещения массива с выхода реверсивного счетчика 22 на удаленное от него устройство отображения информации должна быть предусмотрена система передачи информации.
Работа устройства. Перед измерениями перед реперами 1, 2 растягивают измерительную тягу 3, наматывают ее конец на блок 4 так, чтобы он надежно подпружинивался пружиной 5.
При изменении расстояния между реперами 1, 2 измерительная тяга будет сматываться или наматываться с блоком 4. При вращении блока 4 вращение от вала 6 через редуктор 8, 9 передается на вал 10, что приводит к вращению диска 11. Закрепленные на диске 11 постоянные магниты перемещаются мимо герконов 14 и последовательно своим магнитным полем осуществляют замыкание их контактов. Триггеры Т1, Т2 блока устранения дребезга контактов 17 путем фиксации положения триггеров в одном из возможных состояний.
Блок определения направления перемещения 17 основан на определенной последовательности переключения в зависимости от направления вращения вала 11. При этом в каскаде предварительного определения направления перемещения 18 триггеры Т2, Т3 устанавливаются в единичное состояние в зависимости от начала чередования входных сигналов Д1 и Д2. Если включился сначала один геркон (сигнал Д1), а потом другой (сигнал Д2), то включается триггер Т3, а если последовательность обратная, то Т4, что соответствует положительному и отрицательному направлению вращения. Сбрасываются триггеры сигналом сброс схемы анализа. Схема анализа 20 анализирует состояние выходных сигналов Д1 и Д2 и вырабатывает управляющие сигналы:
- цикл "+" при положительном направлении перемещения;
- цикл "-" при отрицательном направлении перемещения;
- сброс при завершении цикла переключений герконов, а также при возврате герконов из промежуточного положения;
- с одиночный импульс модификации счетчика координаты.
Каскад окончательного определения направления перемещения 19 управления каскадом 18 и схемой анализа 20. Единичное состояние триггеров Т5 или Т6 означает, что оба геркона прошли цикл перекручений в прямом или обратном направлении перемещения.
Сигналом "сброс" триггеры Т5, Т6 возвращаются в исходное состояние. В зависимости от сигналов с выхода каскада 19 реверсивный счетчик либо прибавляет, либо вычитает количество единиц, что соответствует смещению вала 11, а следовательно, изменению расстояния между реперами 1, 2. С помощью блока отображения информации 23 можно в необходимый момент времени определить величину смещения.
Применение предлагаемого датчика позволяет получить целый ряд преимуществ:
1. Применение герконов в предлагаемом датчике позволяет обеспечить высокую экономичность, что обеспечивает его длительную автономную работу.
2. Датчик удобен в эксплуатации, имеет герметичный корпус, высокую защищенность от погодных условий, вмешательства некомпетентных лиц.
3. Применение предложенной схемы обработки сигналов от герконов позволяет надежно определить направление смещения с высокой точностью - до 1 мм при значительных диапазонах смещения ( до 5 м).
4. Возможность использования стандартной промышленной приемопередающей аппаратуры.
5. Передачей информации о состоянии массивов горных пород по одному каналу.
6. В предлагаемом датчике информация представлена в цифровой форме, что повышает помехозащищенность.
Потребность в подобных системах датчиков в настоящее время достаточно велика. До сотни датчиков может быть использовано в рамках одного горного предприятия.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОРЕПЕРНАЯ СИСТЕМА ДИАГНОСТИКИ СОСТОЯНИЯ ГОРНОТЕХНИЧЕСКИХ ОБЪЕКТОВ | 1992 |
|
RU2049231C1 |
| Радиореперная система для определения деформаций массива горных пород | 1988 |
|
SU1581841A1 |
| Устройство для определения деформации массива горных пород | 1989 |
|
SU1686163A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ МАССИВА ГОРНЫХ ПОРОД | 1991 |
|
RU2013544C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ДЕФОРМАЦИЙ ПОРОД КРОВЛИ | 2010 |
|
RU2424431C1 |
| УСТРОЙСТВО КОНТРОЛЯ СМЕЩЕНИЙ JVIACCHBA ГОРНЫХ ПОРОД | 1972 |
|
SU422840A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ МАССИВА ГОРНЫХ ПОРОД | 2000 |
|
RU2193658C2 |
| Преобразователь перемещения в код | 1989 |
|
SU1646055A1 |
| ИЗВЛЕКАЕМАЯ ГЛУБИННАЯ РЕПЕРНАЯ СТАНЦИЯ | 2016 |
|
RU2627503C1 |
| Уровнемер | 1990 |
|
SU1755056A1 |
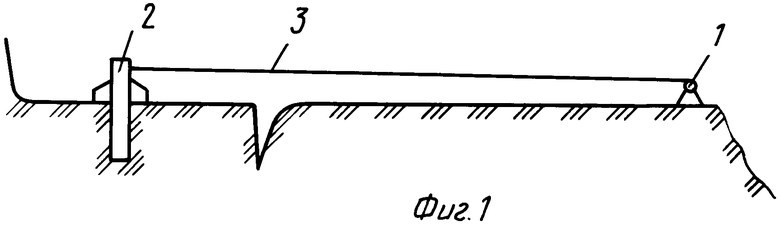
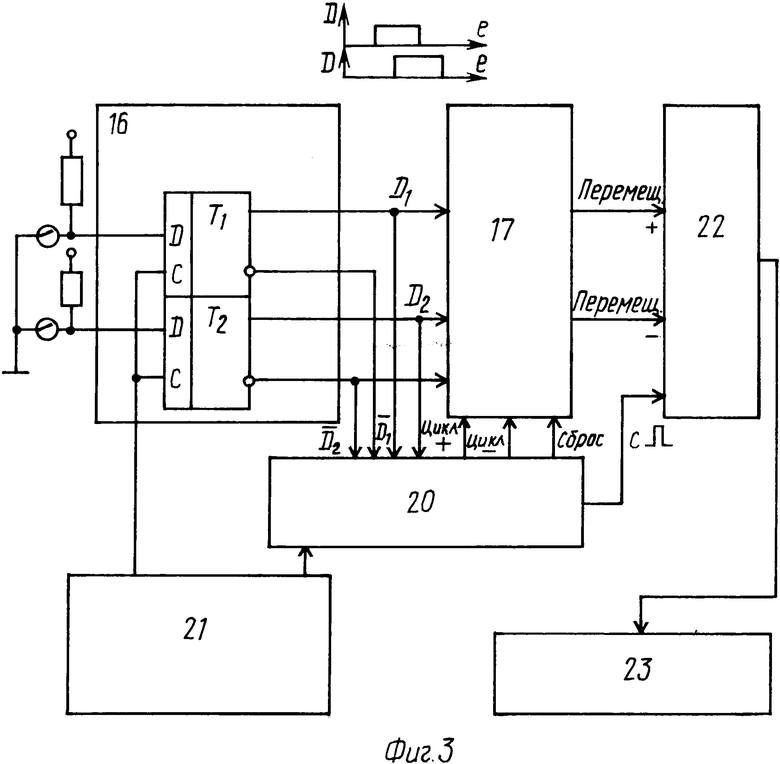
Использование: в маркшейдерской технике и других областях народного хозяйства, связанных с проведением высокоточных измерений на местности. Сущность изобретения: устройство содержит подвижный и неподвижный реперы, соединенные измерительной тягой 3, один конец которой закреплен на подвижном репере, а второй пропущен через шкив 4 неподвижного репера, вал 6 которого соединен с датчиком смещения горных пород, состоящим из установленного в корпусе 7 первичного преобразователя и соединенного с ним блока 15 обработки сигнала. Первичный преобразователь датчика смещения горных пород выполнен в виде люфтовыбирающего редуктора 9, 10, на выходном валу 10 которого установлен диск 11 из неферромагнитного материала с закрепленными по его окружности постоянными магнитами 12 и герконов 14, закрепленных кронштейнами 13 на корпусе 7 с возможностью взаимодействия с магнитными полями постоянных магнитов. При смещении массива горных пород изменяется расстояние между реперами, связанное с датчиком смещения горных пород. Измерительная тяга 3 вызывает вращение диска 11 с закрепленными на нем постоянными магнитами 12, которые своим магнитным полем замыкают контакты герконов, а реверсивный счетчик блока 15 обработки сигнала фиксирует величину смещения путем подсчета количества замыкания герконов 14. 4 ил.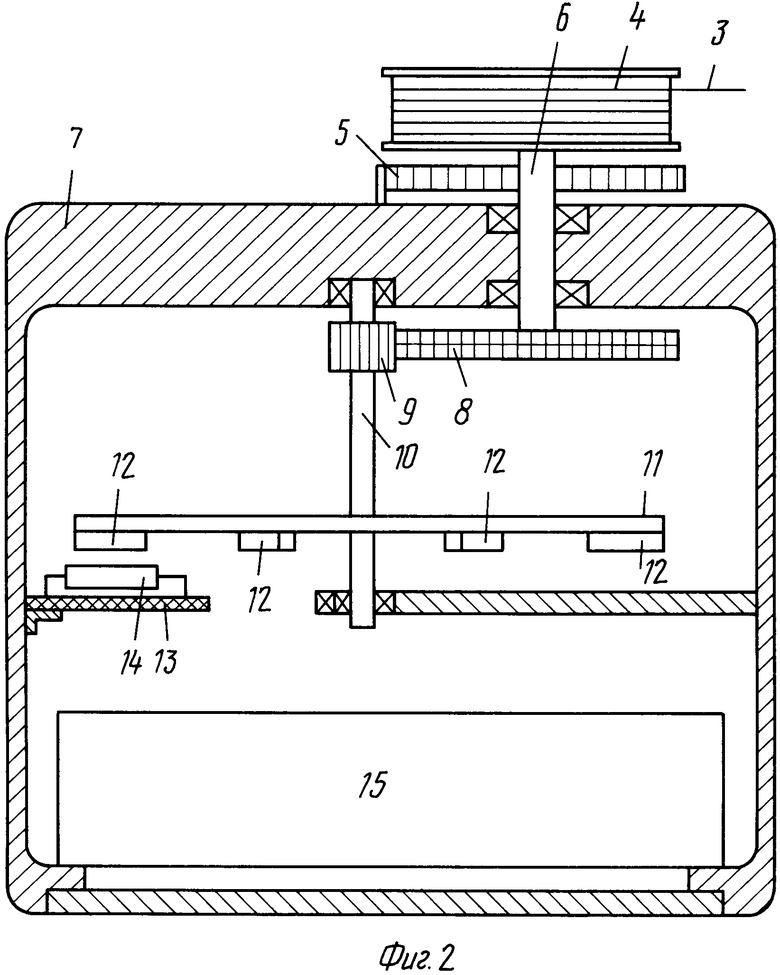
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ МАССИВА ГОРНЫХ ПОРОД, содержащее подвижный и неподвижный реперы, соединенные измерительной тягой, один конец которой закреплен на подвижном репере, а второй пропущен через шкив неподвижного репера, вал которого соединен с датчиком смещения горных пород, состоящим из установленных в корпусе первичного преобразователя и соединенного с ним блока обработки сигнала, отличающееся тем, что, с целью повышения точности и надежности измерений, первичный преобразователь датчика смещения горных пород выполнен в виде люфтовыбирающего редуктора, на выходном валу которого установлен диск из неферромагнитного материала, с закрепленными по его окружности постоянными магнитами и герконов, установленных на корпусе первичного преобразователя с возможностью взаимодействия с магнитными полями постоянных магнитов, при этом блок обработки сигнала содержит блок устранения дребезга герконов, построенный на двух триггерах, блок определения направления перемещения, содержащий каскад предварительного определения направления перемещения, каскад окончательного определения направления, построенные на двух триггерах каждый, и блок анализа, содержащий пять элементов И, генератор тактовых импульсов, реверсивный счетчик перемещения и блок отображения информации, причем первый выход генератора соединен с C-входами триггеров блока устранения дребезга герконов, второй выход соединен с входами первого и второго элементов И блока анализа, оба геркона подключены своими контактами к D-входам триггеров блока устранения дребезга контактов герконов, причем прямые выходы триггеров блока устранения дребезга соединены попарно с D- и C-входами триггеров блока предварительного определения направления перемещения, и элемента И анализа, а с другими входами этих блоков соединены инверсные выходы триггеров блока устранения дребезга, с инверсными выходами блока устранения дребезга соединены входы пятого элемента И, выход которого соединен с первым и вторым элементами И, выход первого элемента И подключен к P-входам триггеров, выход второго элемента И к C-входу реверсивного счетчика, а выходы третьего и четвертого элементов И соединены с C-входами триггеров блока окончательного определения направления перемещения, а с D-входами этих триггеров соединены попарно триггеры предварительного определения направления перемещения, в свою очередь, выходы триггеров блока окончательного определения направления перемещения соединены с реверсивным счетчиком, выход которого связан с блоком отображения информации.
| Радиореперная система для определения деформаций массива горных пород | 1988 |
|
SU1581841A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
