Система относится к горному делу и может быть использована для контроля параметров различных технических объектов.
Известна радиореперная система контроля состояния массивов горных пород [1] включающая подвижный и неподвижный реперы, проволочную тягу с контактной группой, блок питания, радиопередающую аппаратуру, систему эпизодического включения энергоемких каскадов, выполненную в виде светового реле и через блок питания связанную с радиопередающей аппаратурой.
При работе сигналы с радиореперных устройств поступают на диспетчерский пункт, при этом передача информации о деформации массива передается раз в сутки при включении с наступлением светлой части суток системой эпизодического включения энергоемких каскадов радиопередающей аппаратуры.
Так как управление передачей информации осуществляется изменением освещенности от ночи ко дню, систему нельзя использовать при подземных условиях добычи полезных ископаемых.
При открытой разработке использование системы ограничено сложностью передачи информации по радио или проводам в условиях действующего горного предприятия.
Известна радиореперная система, которая включает аппаратуру, расположенную на диспетчерском пункте, аппаратуру, расположенную на измерительных кустах, а также датчики смещения горных пород. На диспетчерском пункте установлено реле времени, которое соединено с блоком питания и с генератором одиночных импульсов. Последний подключен к модулятору радиопередающего узла. На диспетчерском пункте установлен радиоприемный узел, соединенный вторым выходом с магнитофонным записывающим блоком и блоком обработки (микроЭВМ), а первым с входом блока аварийной сигнализации, который подключен к генератору одиночных импульсов и к блоку питания. Подвижные реперы соединены с неподвижными реперами посредством проволочной тяги. На неподвижных реперах закреплены датчики смещения горных пород, которые соединены с аппаратурой измерительного куста проводными линиями связи. На подвижном репере проволочная тяга закреплена жестко, а на неподвижном репере пропущена через блоки и прикреплена к свободно висящему грузу.
Каждый измерительный куст содержит радиоприемный блок, соединенный с автономным блоком питания куста и с формирователем импульсов опроса. Последний выполнен в виде формирователя временной задержки, дешифратора, делителя частоты и генератора. Дешифратор куста и генератор соединены с датчиками смещения горных пород и с формирователем выходных импульсов. В качестве датчика использован фотоэлектрический кодовый датчик. Радиореперная система работает следующим образом.
В дежурном режиме работает радиоприемный узел и реле включения питания диспетчерского пункта. В заданный момент времени реле включения питания срабатывает и подключает аппаратуру диспетчерского пункта. При этом радиопередающий узел диспетчерского пункта передает в эфир импульсный сигнал вызова. Радиоприемный блок каждого измерительного куста принимает этот импульс, который с нужной задержкой включает аппаратуру куста датчиков. Генератор вырабатывает тактовые импульсы, которые поступают на датчики. Прямоугольный импульс с выхода радиоприемного блока поступает также на формирователь временной задержки. Для того, чтобы распределить по времени прием информации, поступающей с аппаратуры каждого измерительного куста, формирователь временной задержки выдает разрешающий импульс с задержкой, например, 1-го куста на одну секунду, 2-го куста на две, 3-го на три секунды и так далее.
Тактовые импульсы поступающие на делитель частоты, делятся таким образом, чтобы время их следования было равно времени считывания информации с каждого датчика смещения горных пород. Импульсы с выхода делителя частоты поступают на дешифратор куста, который последовательно подключает к формирователю импульсов датчики смещения горных пород. В свою очередь дешифратор датчика смещения горных пород последовательно включает светодиоды блока сканирующих светодиодов. В зависимости от того, как нанесена на диске против светодиодов масса, на фокон и фотодиод поступает или не поступает световой поток. При этом снимается информация в двоичном коде о положении диска и соответственно о положении блока. По величине поворота блока можно судить об изменении расстояния между подвижным и неподвижным реперами, то есть о величине смещения. С фотодиода импульсы поступают на формирователь выходных импульсов, где осуществляется частотное кодирование сигнала. Частотно кодированный сигнал поступает на радиопередающий блок и передается на диспетчерский пункт. После передачи информации аппаратурой с измерительного куста реле включения питания отключается и аппаратура переходит в дежурный режим.
Информация фиксируется блоком обработки (микроЭВМ).
Однако системе присущи недостатки, заключающиеся в том, что из-за большого затухания радиосигнала под землей дальность связи не превышает обычно нескольких сотен или даже десятков метров, что делает работу системы невозможной при подземной разработке. При открытой разработке использование радиоканала на большие расстояния в радиореперной системе также может быть затруднено наличием горнотехнических объектов, мешающих распространению радиоволн промышленными помехами. Изготовление радиоканала с дальностью связи в несколько километров требует применения мощных радиопередающих устройств, сложных антенных устройств. Кроме того прокладка проводных линий от датчиков к кусту в условиях карьера затрудняет проведение горных работ.
Целью изобретения является расширение области применения и повышение точности контроля состояния горнотехнических объектов.
Цель достигается тем, что система диагностики состояния горнотехнических объектов, содержащая аппаратуру центрального поста, включающую микроЭВМ и датчики состояния горнотехнических объектов, приемопередающие устройства, снабжена подвижным объектом, имеющим возможность перемещения вдоль аппаратуры центрального поста и датчиков состояния, а также связи с ними, на подвижном объекте закреплен приемный блок, выход которого соединен с входом запоминающего блока, а запоминающий блок одним выходом соединен с устройством отображения информации, а другим выходом с входом устройства управления передачей, в свою очередь устройство управления передачей соединено с входом передающего устройства, к которому подключен также блок вызова, при этом датчик состояния горнотехнического объекта содержит первичный датчик-преобразователь, блок управления передачей, приемное устройство, блок аварийной сигнализации, передатчик, выход первичного датчика соединен с блоком управления передачей, в свою очередь блок управления передачей соединен с выходом приемного устройства и входами передатчика и блока аварийного сигнала, а блок аварийного сигнала подключен к входу передатчика.
Аппаратура центрального поста содержит соединенные последовательно приемное устройство, декодирующий каскад, микроЭВМ и устройство отображения информации.
Возможен вариант системы, в котором аппаратура, установленная на подвижном объекте, содержит блок вызова, соединенный своим выходом с входом передатчика, и приемный блок, соединенный своим выходом с входом съемного запоминающего устройства, соединенного в свою очередь с устройством отображения информации, съемное запоминающее устройство закреплено на подвижном объекте с возможностью его снятия и подключения к аппаратуре центрального поста, содержащего микроЭВМ и устройство отображения информации.
Такое выполнение системы позволяет расширить область ее применения, а именно, применять ее при подземной разработке и при значительных удалениях датчиков состояния горнотехнических объектов от аппаратуры центрального поста. Это достигается тем, что в предлагаемой системе на подвижном объекте установлен блок вызова, соединенный с передающим устройством, а приемный блок соединен с запоминающим блоком.
В системе, в отличие от аналога и прототипа, нет необходимости устанавливать мощные радиопередающие устройства и сложные антенны, прокладывать проводные линии связи. Связь в системе может быть построена на передающих и приемных устройствах различной физической природы, например, радиотехнических, электромагнитных, фотоэлектрических, акустических, а также их комбинаций. Отсутствие в системе мощных передающих устройств позволяет продлить срок автономной работы системы, а применение приемо-передающих устройств различной физической природы расширять возможные области применения системы и ее эффективность.
Ввиду того, что аппаратура подвижного объекта связывается только с конкретным датчиком в непосредственной близости от него, то вероятность искажения сигналов, связанная с передачей информации, в данном случае значительно ниже, чем в прототипе и известных аналогах. Все это повышает точность работы системы в целом. Оснащение системы съемным запоминающим устройством позволяет упростить аппаратуру на подвижном объекте и аппаратуру центрального поста.
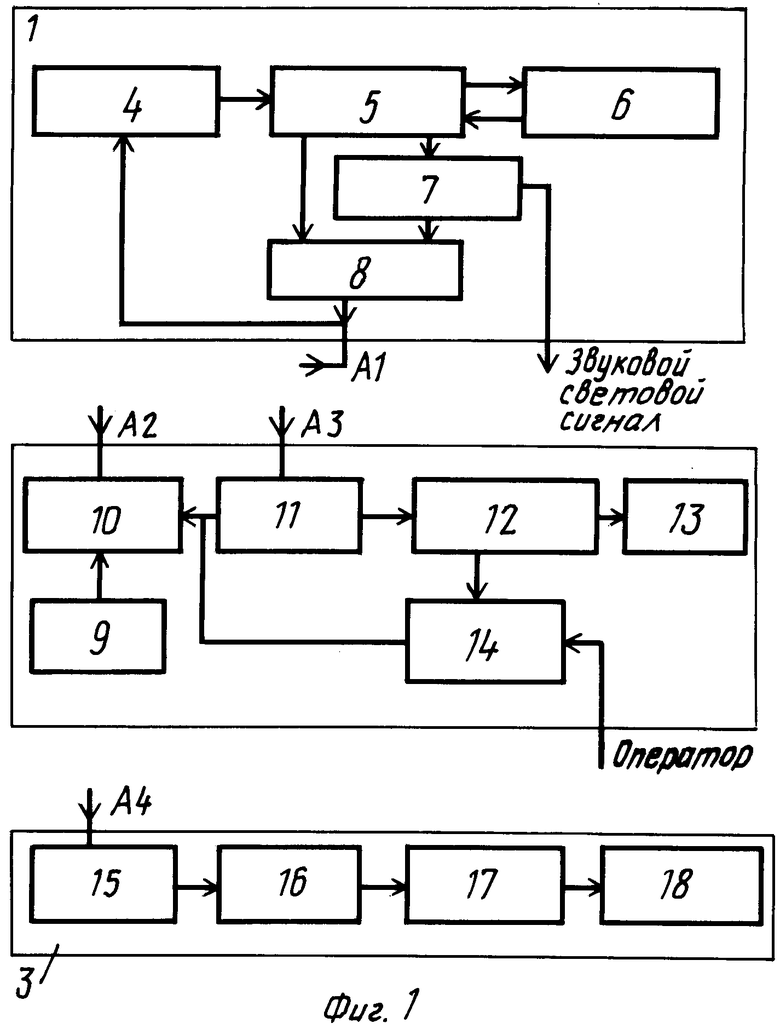
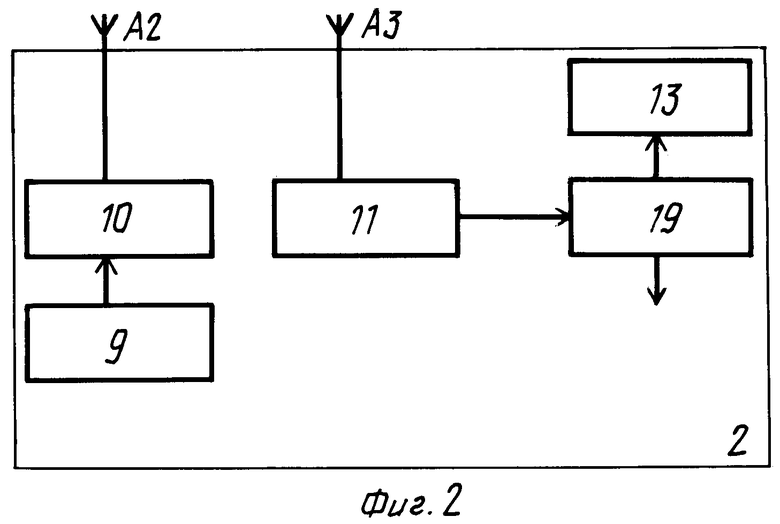
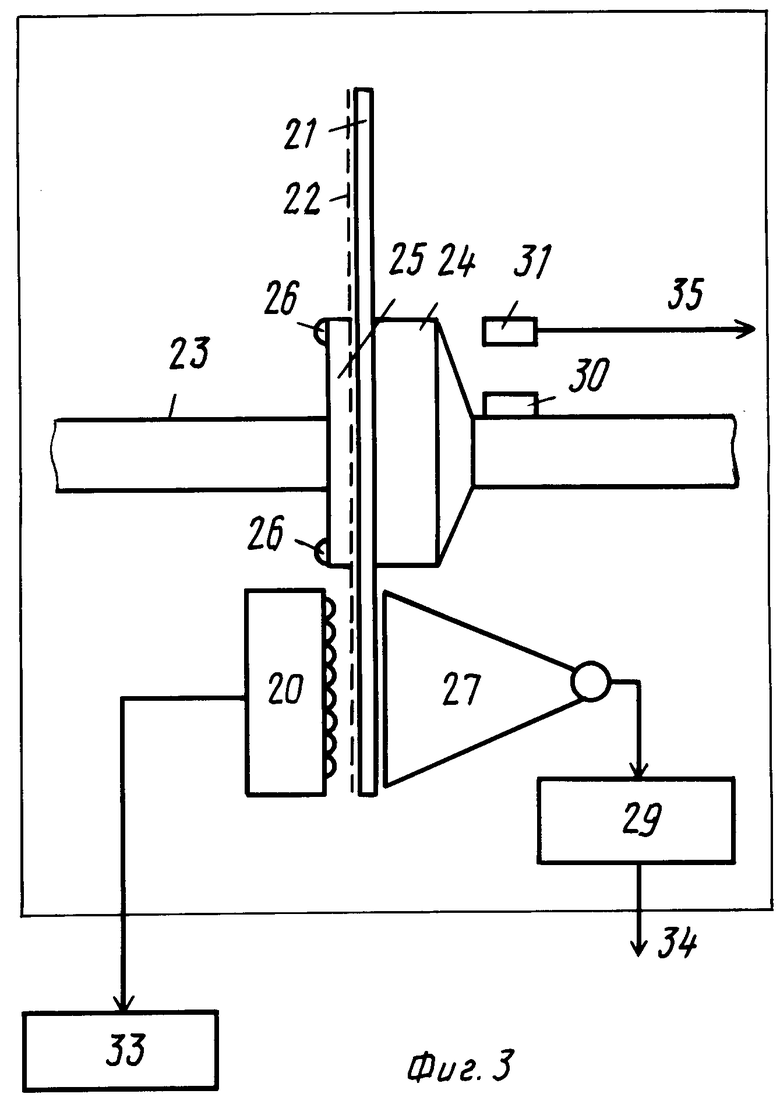
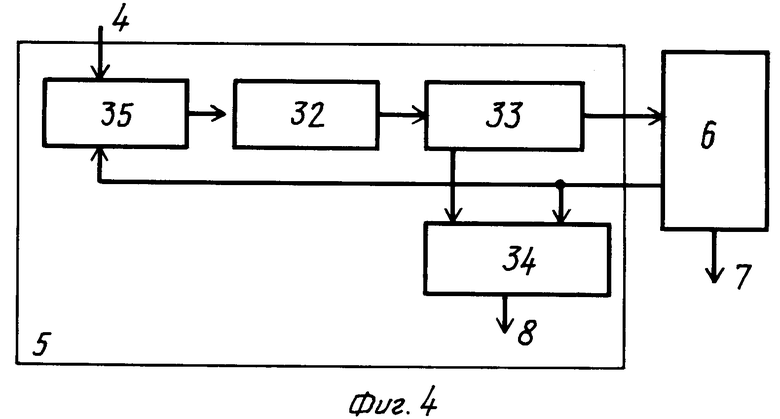
На фиг. 1, 2 представлены варианты построения системы; на фиг. 3 схема датчика-преобразователя; на фиг. 4 схема блока управления передачей.
Предлагаемая радиореперная система диагностики состояния горнотехнических объектов содержит (фиг. 1, 2), датчик 1 состояния горнотехнических объектов, подвижный объект с размещенной на нем аппаратурой и аппаратуру 3 центрального поста. Датчик 1 состояния горнотехнических объектов размещается на контролируемом объекте и содержит приемное устройство 4, блок 5 управления передачей, первичный датчик преобразователь 6, блок 7 аварийной сигнализации и передатчик 8. Выход приемного устройства 4 соединен с входом блока 5 управления передачей, к которому подключен также первичный датчик-преобразователь 6. Выходы блока 5 управления передачей соединены с блоком 7 аварийной сигнализации и передатчиком 8. Выход блока 7 аварийной сигнализации соединен с входом передатчика 8.
В качестве подвижного объекта 2 может быть использован подземный и карьерный транспорт. Аппаратура может быть при этом размещена на электровозе, карьерном самосвале и т. д. Аппаратурой может быть специально оборудован автомобиль. Возможно использование переносного комплекта аппаратуры в тех местах горнотехнического объекта, где использование транспортных средств нецелесообразно или невозможно.
На подвижном объекте 2 установлены аппаратура, содержащая блок 9 вызова, который своим выходом соединен с передающим устройством 10, приемный блок 11, подключенный к запоминающему блоку 12, который своими выходами соединен с устройством 13 отображения информации и устройством 14 управления передачей. Устройство 14 управления передачей своим выходом соединено с входом передающего устройства 10. Аппаратура 3 центрального поста устанавливается в управлении карьера или шахты. Аппаратура центрального поста содержит приемное устройство 15, подключенное к декодирующему каскаду 16, соединенному своим выходом с микроЭВМ 17, к выходу которого подключено устройство 18 отображения информации. Возможен вариант системы (фиг. 2), в котором аппаратура, закрепленная на подвижном объекте 2, содержит съемное запоминающее устройство 19, присоединенное своим входом к приемному блоку 11, а выходом к устройству 13 отображения и информации. При этом съемное запоминающее устройство 19 может подключаться непосредственно к микроЭВМ 17.
В датчике состояния горнотехнического объекта могут быть использованы в качестве первичного датчика-преобразователя 6 датчики смещения, например фотоэлектрический датчик смещения, тензодатчики акустической и электромагнитной эмиссии, сейсмодатчики.
Например, в случае применения в датчике состояния фотоэлектрического датчика смещения последний может содержать (фиг. 3), блок 20 сканирующих светодиодов, установленных вплотную к прозрачному диску 21, на одной стороне диска нанесена кодовая маска 22. Диск 21 закреплен на оси 23, жестко связанной с горнотехническим объектом креплением диска 21. Крепление диска 21 на оси 23 осуществлено с помощью фигурной втулки 24 с возможностью ее установки с натягом на ось 23 и прижимной шайбы 25, в которой установлены винты 26. Для лучшей центровки диска фигурная втулка 24 и прижимная шайба 25 снабжены концентричными относительно оси кольцеобразными буртами (не показано), наружные диаметры которых равны внутреннему диаметру диска 21. С противоположной стороны диска 21, напротив блока 20 сканирующих светодиодов расположен фокон 27 с закрепленным на нем фотодиодом 28 и усилителем 29 напряжения. В датчиках-преобразователях 6 на оси 21 закреплены постоянные магниты 30 с возможностью воздействия их магнитного поля с расположенным неподвижно герконом 31. Количество постоянных магнитов 30 выбирается исходя из заданной максимально допустимой величины смещения для данного горнотехнического объекта.
Устройство блока 5 управления передачей зависит от типа выбранного первичного датчика-преобразователя 6 и выбранной формы обработки сигнала.
Например, при использовании описанного выше фотоэлектрического датчика смещения блок 5 управления передачей 5 включает (фиг. 4) подсоединенное к приемному устройству реле 35 включения питания, которое подключает к источнику питания аппаратуру датчика 1, генератор 32 опорной частоты, присоединенный своим выходом к дешифратору 33, одна часть выходов дешифратора 33 (микросхема К 561ИЕ8) соединена со сканирующими светодиодами 20 первичного датчика-преобразователя 6, а другая с входом формирователя 34 выходных импульсов. Выходы усилителя 29, датчика смещения подключены к формирователю 34 выходных импульсов, построенному, например, на микросхеме К 155ЛР4 и содержащему также каскад номера датчика (не показано), который может быть, например, сформирован путем установки соответствующих перемычек на выходах дешифратора 33, для получения необходимого двоичного кода датчика.
Геркон датчика-преобразователя 6 соединен с реле 35 включения питания и блоком 7 аварийной сигнализации.
В качестве приемного устройства 4, передатчика 8 в датчике состояния, передающего устройства 10, приемного блока 11 аппаратуры, закрепленной на подвижном объекте 2, приемного устройства 15 аппаратуры центрального поста могут быть использованы устройства, основанные на передаче информации сигнала различной физической природы.
Это могут быть устройства радиосвязи, световые, ультразвуковые или электромагнитные, а также их комбинации. Например, при подземных условиях разработки могут быть применены электромагнитные генераторы и контуры с индуктивной связью между ними. При передаче информации с помощью радиосвязи к входу приемного устройства 4 и выхода передатчика 8 подключена антенна А 1, к выходу передающего устройства 10 антенна А 2, входу приемного блока 11 антенна А 3, а к входу приемного устройства 15 антенна А 4.
В качестве запоминающего блока 12 или съемного запоминающего устройства 19 может применяться магнитофон или он может быть построен с использованием запоминающих устройств, например, микросхем серии 537РУ. Устройство 13 отображения информации может быть построено, например, на семиэлементных индикаторах. В качестве устройства 14 управления передачей может быть использовано коммутирующее контактное устройство, подключающее запоминающий блок 12 к передающему устройству 10. Возможен вариант системы, когда информация на микроЭВМ 17 поступает как со съемного запоминающего устройства, так и с подвижных объектов 2 по радиоканалу.
Блок 9 вызова содержит генератор звуковой частоты, например, 1000 Гц (микросхема одновибратор К 155АГ-3) и обеспечивает посылку импульсов с этой частотой импульсов длительностью до 1 с и периодичностью 5-10 с. Декодирующий каскад 16 обеспечивает необходимую амплитуду и крутизну переднего и заднего фронтов импульсов сигналов с радиоприемного устройства 15.
Для обработки поступающей на аппаратуру 3 центрального поста, информации может быть использован любой персональный компьютер, например, 1 ВМ РС/ХТ, СМ1420 и т. д. К выходу ЭВМ подключено устройство 18 отображения информации, принтер, дисплей и т. д. Кроме того могут быть подключены различные звуковые и световые устройства сигнализации.
Работа устройства осуществляется следующим образом.
В каждом датчике 1 состояния (фиг. 1) в дежурном режиме работает от автономного источника питания (не показано) только приемное устройство 4. Остальная аппаратура датчика 1 обесточена. В случае применения в первом датчике-преобразователе 6 датчиков смещения ось 23 (фиг. 3), связанная с горнотехническим объектом, вращается соответственно изменению расстояния между точками горнотехнического объекта. Вместе с ним проворачивается прозрачный диск 21 с нанесенной на нем кодовой маской.
С необходимой периодичностью, например раз в сутки, мимо всех датчиков 1 состояния перемещается подвижный объект 2.
Формируемые блоком 9 вызова сигналы поступают на передающее устройство 10 и излучаются в эфир антенной А 2. Эти сигналы улавливаются антенной А 1 и поступают на вход приемного устройства 4 датчика 1 состояния и при достижении определенного уровня сигнала на выходе приемного устройства 4 срабатывает реле 35 включения питания (фиг. 2) блока 5 управления передачей. При этом генератор 32 опорной частоты начинает вырабатывать импульсы, например, с частотой 1000 Гц. Эти импульсы поступают на вход дешифратора 33 и распределяются им последовательно на светодиоды блока 20 сканирующих светодиодов. В зависимости от положения диска и соответственно кодовой маски 22 свет от светодиодов поступает или не поступает на фокон 27. С выхода фотодиода 28 сигнал, соответствующий положению диска 21, в виде последовательности импульсов усиливается до необходимого уровня усилителем 29 напряжения и поступает на вход формирователя 34 выходных импульсов, который формирует сигнал, содержащий кодовый сигнал, соответствующий состоянию горнотехнического объекта, и код номера датчика с помощью каскада кода датчика и этот сигнал передатчиком 8 передается в эфир. Реле 35 включения питания имеет блокировку, например R-C звено (не показано), которое обеспечивает замкнутое положение контактов реле 35 на время передачи информации. После передачи информации реле 35 размыкается и датчик 1 состояния возвращается в исходное положение. Если принять дальность связи подвижного объекта 2 с датчиком 1-50 м, скорость движения объекта 2-5 м/с, при подаче сигналов вызова с интервалом 5 с, то на подвижный объект 2 с датчика за время перемещения объекта 2 поступит около 4-х передач (50˙2/5˙5 4). Четырехкратная посылка сигналов достаточна для неискаженной передачи информации.
Если на каком-либо участке горнотехнического объекта смещение достигнет какого-либо заданного уровня, один из магнитов 30, закрепленный на оси 23 первичного датчика-преобразователя 6, замкнет контакты геркона 31. Это в свою очередь вызовет срабатывание реле 35 включения питания 4 включение блока 7 аварийной сигнализации.
Блок 7 аварийной сигнализации при этом постоянно передает, например, световые, звуковые и радиосигналы тревоги, которые фиксируются персоналом, находящимся на горнотехническом объекте, и аппаратурой, расположенной на подвижном объекте 2.
Информация о состоянии горнотехнического объекта с приемного блока 11 поступает на запоминающий блок 12, фиксируется там и отображается устройством 13.
При приближении подвижного объекта 2 к антенне А 4 аппаратуры 3 центрального поста, оператор с помощью устройства 14 управления передачей (например, обеспечив соответствующую коммутацию) осуществляет передачу информации передающим устройством 10. С помощью антенны А 4 приемное устройство 15 осуществляет прием информации. Декодирующий каскад 16 обеспечивает необходимые фронты и амплитуды импульсов для работы микроЭВМ 17.
МикроЭВМ 17 осуществляет обработку информации о состоянии горнотехнического объекта.
В случае необходимости антенна А 4 и приемное устройство могут быть удалены от микроЭВМ 17 и соединены линиями связи. Например, приемное устройство 15 может быть расположено в шахте, под землей, а остальная аппаратура центрального поста располагается в управлении шахтой на поверхности земли.
Если подвижный объект 2 снабжен съемным запоминающим устройством 19, то после снятия информации с датчиков съемное устройство 19 отсоединяют от аппаратуры подвижного объекта 2 и подключают непосредственно к микроЭВМ 17 аппаратуры центрального поста. Переписав информацию со съемного запоминающего устройства 19 на микроЭВМ 17, его вновь закрепляют на объекте 2.
Если какая-либо из точек контролируемого горнотехнического объекта 2 удалена от маршрута движения подвижного объекта, то передача информации от точки установки датчика передающей аппаратуре, установленной вблизи маршрута, может осуществляться по линиям связи.
Особенностью предлагаемой системы является ее универсальность и возможность широкого применения в различных областях горной промышленности, в строительстве и на транспорте.
Применение передающих и приемных устройств различной физической природы (радио, электромагнитные, световые, акустические, а также их сочетания) позволяет создавать систему, эффективно работающую в конкретных условиях.
При использовании радиосвязи в системе нет необходимости в установке мощных передающих устройств и сложных антенн, что значительно упрощает датчики и их эксплуатацию.
Предлагаемая система потребляет мало электроэнергии, позволяет максимально автоматизировать процесс съема информации о состоянии наблюдаемого объекта.
Система может быть подключена к программно-техническому комплексу АСУ горного предприятия.
Круг задач, решаемых с помощью предлагаемой системы, не ограничивается диагностикой состояния устойчивости бортов карьеров при высокоточных измерениях на местности вообще. Аппаратура предлагаемой системы может быть использована для контроля за показаниями датчиков какой-либо первичной информации. В частности, можно использовать предлагаемую систему для контроля положения железнодорожных полотен, мостов, тоннелей, дорог, трубопроводов и газопроводов, а также уровня топлива в резервуарах, с передачей этой информации на диспетчерский пункт.
Система легко может быть восполнена на современной элементной базе, ее аппаратурная реализация допускает применение микросхем различных серий как отечественных, так и зарубежных.
Благодаря своим высоким эксплуатационным качествам точности и надежности диагностики состояния объектов, автоматизации этого процесса, эффективности обработки и анализа получаемой информации, а также малым размерам, весу и низкой стоимости аппаратуры, предлагаемая радиореперная система при массовом производстве будет достаточно конкурентно-способна на мировом рынке.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ МАССИВА ГОРНЫХ ПОРОД | 1991 |
|
RU2016195C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ МАССИВА ГОРНЫХ ПОРОД | 1991 |
|
RU2013544C1 |
| Радиореперная система для определения деформаций массива горных пород | 1988 |
|
SU1581841A1 |
| СИСТЕМА ТЕЛЕСИГНАЛИЗАЦИИ СТАЦИОНАРНЫХ И МОБИЛЬНЫХ ОБЪЕКТОВ | 1998 |
|
RU2143745C1 |
| Устройство для определения деформации массива горных пород | 1989 |
|
SU1686163A1 |
| Способ контроля и регулирования режима работы трубопровода | 1990 |
|
SU1839706A3 |
| СПОСОБ КОМПЛЕКСНОГО ТЕЛЕМОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2216047C2 |
| СИСТЕМА КОНТРОЛЯ ЗА РАБОТОЙ СКВАЖИН С ДВУСТОРОННЕЙ СВЯЗЬЮ | 1994 |
|
RU2093897C1 |
| Устройство для сбора и передачи информации | 1976 |
|
SU708389A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
Радиореперная система диагности состояния горнотехнических объектов относится к горному делу и может быть использована для контроля различных объектов. Система включает аппаратуру центрального поста, содержащую микроЭВМ, датчики состояния горнотехнического объекта, установленные на подвижном объекте, генератор, соединенный передающим устройством, и приемное устройство, соединеное с запоминающим устройством. Подвижный объект перемещается по маршруту, вдоль которого установлены датчики состояния массива горных пород, при этом передающее устройство, закрепленное на подвижном объекте, передает сигналы генератора. Сигналы принимаются приемным блоком датчика состояния массива горных пород. В результате активизируется аппаратура датчика и он передает с помощью передающего блока информацию состояния горнотехнического объекта. Информация принимается приемным блоком на подвижном объекте, поступает на запоминающее устройство и фиксируется там после съема информации со всех датчиков. Запоминающее устройство снимают с подвижного объекта и подключают к микроЭВМ аппаратуры центрального поста. МикроЭВМ обрабатывает информацию о состоянии горнотехнического объекта. 1 з. п. ф-лы, 4 ил.
| Радиореперная система для определения деформаций массива горных пород | 1988 |
|
SU1581841A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
